use inlier::api::estimate_line;
use nalgebra::DMatrix;
use plotters::prelude::*;
use rand::Rng;
fn main() -> Result<(), Box<dyn std::error::Error>> {
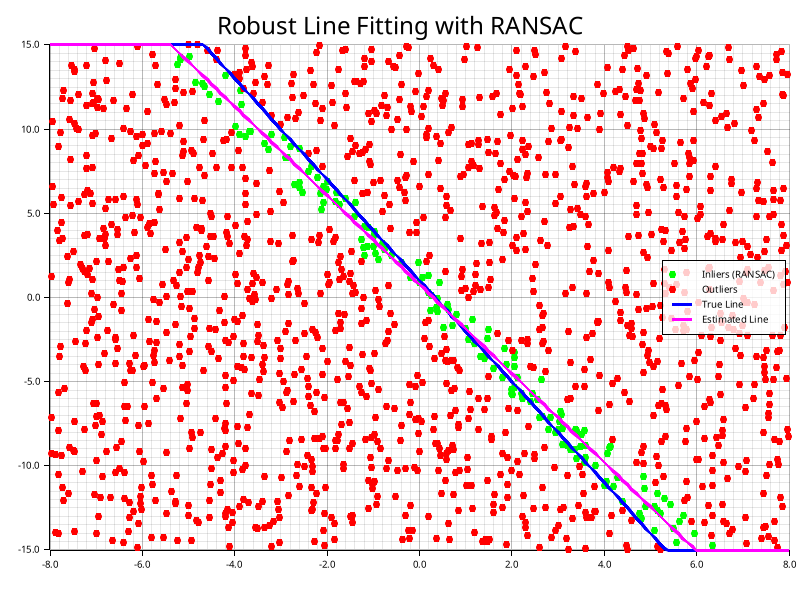
println!("=== Robust Linear Regression Example ===\n");
let n_inliers = 50;
let n_outliers = 20;
let n_total = n_inliers + n_outliers;
let mut rng = rand::rng();
let mut points = DMatrix::<f64>::zeros(n_total, 2);
let true_slope = 2.0;
let true_intercept = 1.0;
for i in 0..n_inliers {
let x = (i as f64) * 0.1 - 2.5;
let y = true_slope * x + true_intercept + rng.random_range(-0.1..0.1);
points[(i, 0)] = x;
points[(i, 1)] = y;
}
for i in n_inliers..n_total {
points[(i, 0)] = rng.random_range(-5.0..5.0);
points[(i, 1)] = rng.random_range(-10.0..10.0);
}
use rand::seq::SliceRandom;
let mut indices: Vec<usize> = (0..n_total).collect();
indices.shuffle(&mut rng);
let mut shuffled_points = DMatrix::<f64>::zeros(n_total, 2);
for (new_idx, &old_idx) in indices.iter().enumerate() {
shuffled_points[(new_idx, 0)] = points[(old_idx, 0)];
shuffled_points[(new_idx, 1)] = points[(old_idx, 1)];
}
println!(
"Generated {} inliers and {} outliers",
n_inliers, n_outliers
);
println!(
"True line: y = {:.2}x + {:.2}\n",
true_slope, true_intercept
);
let threshold = 0.2; let result = estimate_line(&shuffled_points, threshold, None)?;
println!("RANSAC Linear Regression Results:");
println!(
" Found {} inliers out of {} points",
result.inliers.len(),
n_total
);
println!(
" Inlier ratio: {:.2}%",
100.0 * result.inliers.len() as f64 / n_total as f64
);
println!(" Score: {:?}", result.score);
println!(" Iterations: {}", result.iterations);
let line = &result.model;
let params = line.params();
println!(
"\nEstimated line: {:.4}x + {:.4}y + {:.4} = 0",
params[0], params[1], params[2]
);
if let Some((slope, intercept)) = line.to_slope_intercept() {
println!(
" In slope-intercept form: y = {:.4}x + {:.4}",
slope, intercept
);
println!(
" True line: y = {:.4}x + {:.4}",
true_slope, true_intercept
);
println!(" Error in slope: {:.4}", (slope - true_slope).abs());
println!(
" Error in intercept: {:.4}",
(intercept - true_intercept).abs()
);
}
let mut found_inliers = 0;
for &idx in &result.inliers {
let x = shuffled_points[(idx, 0)];
let y = shuffled_points[(idx, 1)];
let expected_y = true_slope * x + true_intercept;
let dist = (y - expected_y).abs();
if dist < 0.2 {
found_inliers += 1;
}
}
println!(
"\nCorrectly identified {} out of {} true inliers",
found_inliers, n_inliers
);
let output_file = "linear_regression_result.png";
let root = BitMapBackend::new(output_file, (800, 600)).into_drawing_area();
root.fill(&WHITE).unwrap();
let mut chart = ChartBuilder::on(&root)
.caption(
"Robust Linear Regression with RANSAC",
("sans-serif", 40).into_font(),
)
.margin(10)
.x_label_area_size(40)
.y_label_area_size(50)
.build_cartesian_2d(-6.0..6.0, -12.0..12.0)
.unwrap();
chart.configure_mesh().draw().unwrap();
let inlier_set: std::collections::HashSet<usize> = result.inliers.iter().cloned().collect();
for i in 0..n_total {
if !inlier_set.contains(&i) {
chart
.draw_series(std::iter::once(Circle::new(
(shuffled_points[(i, 0)], shuffled_points[(i, 1)]),
3,
RED.filled(),
)))
.unwrap();
}
}
for &idx in &result.inliers {
chart
.draw_series(std::iter::once(Circle::new(
(shuffled_points[(idx, 0)], shuffled_points[(idx, 1)]),
3,
GREEN.filled(),
)))
.unwrap();
}
let true_line_points: Vec<(f64, f64)> = (0..=120)
.map(|i| {
let x = -6.0 + (i as f64) * 0.1;
(x, true_slope * x + true_intercept)
})
.collect();
chart
.draw_series(LineSeries::new(true_line_points, BLUE.stroke_width(2)))
.unwrap()
.label("True line")
.legend(|(x, y)| PathElement::new(vec![(x, y), (x + 20, y)], BLUE.stroke_width(2)));
if let Some((slope, intercept)) = line.to_slope_intercept() {
let estimated_line_points: Vec<(f64, f64)> = (0..=120)
.map(|i| {
let x = -6.0 + (i as f64) * 0.1;
(x, slope * x + intercept)
})
.collect();
chart
.draw_series(LineSeries::new(estimated_line_points, RED.stroke_width(2)))
.unwrap()
.label("Estimated line")
.legend(|(x, y)| PathElement::new(vec![(x, y), (x + 20, y)], RED.stroke_width(2)));
}
chart
.configure_series_labels()
.background_style(WHITE.mix(0.8))
.border_style(BLACK)
.draw()
.unwrap();
root.present().unwrap();
println!("\nPlot saved to: {}", output_file);
Ok(())
}
{kind=link}