use inlier::api::estimate_line;
use nalgebra::DMatrix;
use rand::Rng;
fn main() -> Result<(), Box<dyn std::error::Error>> {
println!("=== Robust Line Fitting Example ===\n");
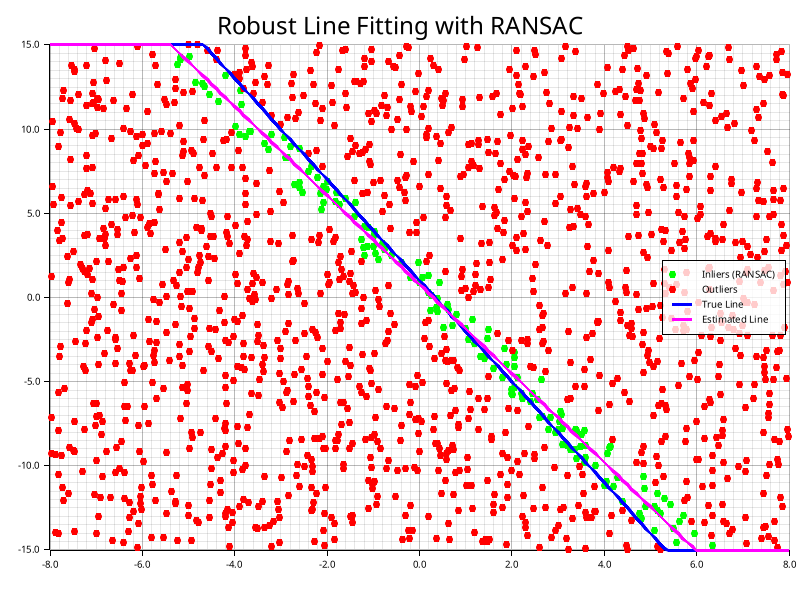
let n_inliers = 60;
let n_outliers = 25;
let n_total = n_inliers + n_outliers;
let mut rng = rand::rng();
let true_slope = 2.0;
let true_intercept = 1.0;
println!("True line: y = {:.2}x + {:.2}", true_slope, true_intercept);
println!(
"Generating {} inliers and {} outliers\n",
n_inliers, n_outliers
);
let mut points = Vec::new();
for i in 0..n_inliers {
let x = (i as f64) * 0.2 - 6.0;
let y = true_slope * x + true_intercept + rng.random_range(-0.3..0.3);
points.push((x, y));
}
for _ in 0..n_outliers {
let x = rng.random_range(-10.0..10.0);
let y = rng.random_range(-20.0..20.0);
points.push((x, y));
}
use rand::seq::SliceRandom;
let mut rng = rand::rng();
points.shuffle(&mut rng);
let mut points_matrix = DMatrix::<f64>::zeros(n_total, 2);
for (i, &(x, y)) in points.iter().enumerate() {
points_matrix[(i, 0)] = x;
points_matrix[(i, 1)] = y;
}
let threshold = 0.5; let result = estimate_line(&points_matrix, threshold, None)?;
println!("RANSAC Results:");
println!(
" Found {} inliers out of {} points",
result.inliers.len(),
n_total
);
println!(
" Inlier ratio: {:.2}%",
100.0 * result.inliers.len() as f64 / n_total as f64
);
println!(" Score: {:?}", result.score);
println!(" Iterations: {}", result.iterations);
let line = &result.model;
let params = line.params();
println!(
"\nEstimated line: {:.4}x + {:.4}y + {:.4} = 0",
params[0], params[1], params[2]
);
if let Some((slope, intercept)) = line.to_slope_intercept() {
println!(
" In slope-intercept form: y = {:.4}x + {:.4}",
slope, intercept
);
println!(
" True line: y = {:.4}x + {:.4}",
true_slope, true_intercept
);
println!(" Error in slope: {:.4}", (slope - true_slope).abs());
println!(
" Error in intercept: {:.4}",
(intercept - true_intercept).abs()
);
}
let mut found_inliers = 0;
for &idx in &result.inliers {
let x = points_matrix[(idx, 0)];
let y = points_matrix[(idx, 1)];
let expected_y = true_slope * x + true_intercept;
let dist = (y - expected_y).abs();
if dist < 0.5 {
found_inliers += 1;
}
}
println!(
"\nCorrectly identified {} out of {} true inliers",
found_inliers, n_inliers
);
Ok(())
}
{kind=link}