# Inlier Library Examples
This directory contains example programs demonstrating how to use the `inlier` library for robust estimation tasks.
## Examples
### 1. `linear_regression.rs`
Demonstrates the general RANSAC workflow. Shows how to use the library for robust estimation tasks.
**Run:**
```bash
cargo run --example linear_regression
```
### 2. `homography_estimation.rs`
Estimates a homography matrix from 2D point correspondences with outliers.
**Run:**
```bash
cargo run --example homography_estimation
```
**What it does:**
- Generates synthetic 2D point correspondences with a known transformation
- Adds outliers to test robustness
- Estimates the homography using RANSAC
- Reports inlier count and estimated transformation
### 3. `fundamental_matrix.rs`
Estimates a fundamental matrix from point correspondences between two camera views.
**Run:**
```bash
cargo run --example fundamental_matrix
```
**What it does:**
- Simulates two camera views of 3D points on a plane
- Adds outliers to test robustness
- Estimates the fundamental matrix using RANSAC
- Verifies the rank-2 constraint
### 4. `line_fitting.rs`
Demonstrates robust line fitting (using homography as a workaround for demonstration).
**Run:**
```bash
cargo run --example line_fitting
```
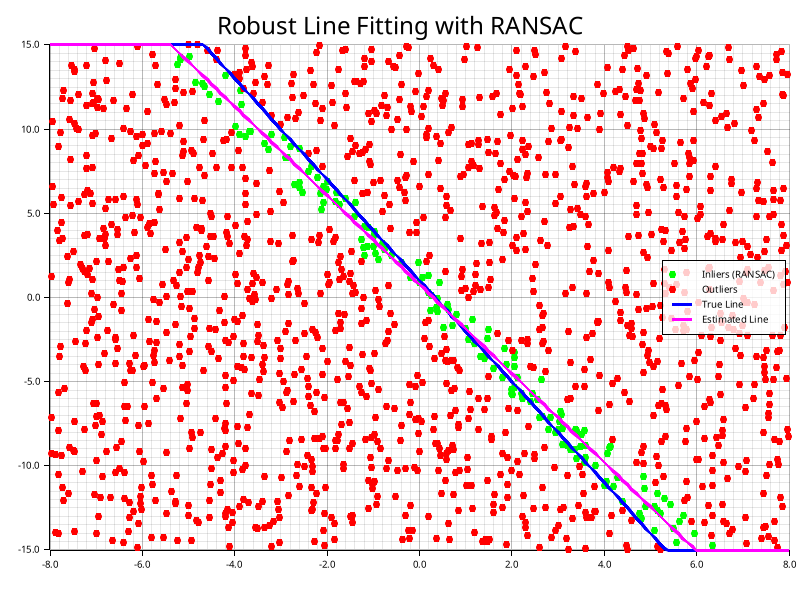
### 5. `plot_line_fitting.rs`
Robust line fitting with visualization. Creates a plot showing inliers, outliers, and the estimated line.
**Run:**
```bash
cargo run --example plot_line_fitting
```
**Output:** Creates `examples/line_fitting_plot.png` showing:
- Green circles: Inliers found by RANSAC
- Red circles: Outliers
- Blue line: True line
## Custom Estimators
For tasks like line fitting, you would typically create a custom estimator implementing the `Estimator` trait. The examples show the general workflow using the built-in geometric estimators.
{kind=link}