<!-- filepath: /Volumes/Workspace/rust/rsactor/docs/actor_model.md -->
# Why the Actor Model Matters
## Summary
This post delves into the critical role of the actor model in modern software development, especially as multi-core processors become ubiquitous and concurrency a necessity. We begin by acknowledging the breakdown of Moore's Law for single-core performance, which has pushed parallel computing to the forefront, bringing with it the inherent complexities of concurrent programming. While Rust offers significant advancements in safety, particularly by preventing data races, logical pitfalls like deadlocks remain a concern in systems reliant on shared mutable state and locks.
We argue that deadlocks, often underestimated, pose substantial challenges in complex software, similar to how memory management complexities spurred innovations like garbage collection and Rust's ownership system. The post then introduces the guiding principle "Don't communicate by sharing memory; share memory by communicating," highlighting its effectiveness in mitigating such issues, as demonstrated in frameworks like Android and languages like Go.
The core of the discussion focuses on the actor model, explaining its origins with Carl Hewitt and its fundamental concepts: actors as isolated entities with private state, communicating solely through asynchronous messages. We explore how Rust's `async/await` features and channel-based communication provide an ideal environment for implementing the actor model, even for in-process concurrency. Libraries such as `rsactor` (referenced by `https://github.com/hiking90/rsactor`) further facilitate this by offering abstractions to build actor-based systems.
Ultimately, we posit that the actor model is a superior approach for developing multi-threaded concurrent programs in Rust when the goal is to minimize direct `Mutex` usage and, consequently, the risk of deadlocks. The post concludes by advocating for the adoption of the actor model to build more robust, maintainable, and understandable concurrent applications in the demanding multi-core era.
## The Shifting Sands of Computation: Moore's Law and Concurrency
For decades, Moore's Law reliably predicted an exponential increase in CPU transistor counts, translating to faster single-core performance. However, this trend has hit physical limitations. The industry's response has been a shift towards multi-core processors, making parallel and concurrent programming not just a niche for high-performance computing, but a mainstream necessity for responsive and efficient applications.
While concurrency unlocks significant performance gains, it's a double-edged sword. It introduces a host of complex problems: race conditions, starvation, and the infamous deadlock. To tame this complexity, various programming paradigms and constructs have evolved, from low-level threads and locks to more abstract mechanisms like callbacks, then Promises/Futures, and more recently, `async/await` syntax, each aiming to make concurrent code easier to write and reason about.
## Rust: A Beacon of Safety in Concurrent Waters
The Rust programming language emerged as a game-changer for systems programming, offering memory safety and data race prevention at compile time through its innovative ownership and borrowing system. This is a monumental step forward for writing concurrent software, as it eliminates entire classes of bugs that plague languages like C++.
However, while Rust makes concurrency *safer*, it doesn't magically solve all concurrency challenges. Specifically, logical errors like deadlocks can still occur. If your program design involves multiple tasks needing exclusive access to multiple shared resources (often managed by `Mutex`es or similar locking primitives), the conditions for a deadlock can still arise, regardless of Rust's compile-time checks for memory and data race safety.
## The Deceptive Simplicity of Deadlocks
One might be tempted to dismiss deadlocks as a relatively minor issue, perhaps one that careful programming can easily avoid. But let's draw a parallel: consider memory management. The simple acts of allocating and deallocating memory seem straightforward, yet they have historically been a massive source of bugs (dangling pointers, memory leaks, use-after-free). This complexity led to the development of sophisticated solutions like garbage collectors, smart pointers, and ultimately, Rust's ownership system.
Deadlocks share this deceptive simplicity. In small, isolated examples, they are easy to spot and fix. But in large-scale software systems with numerous interacting components, multiple locks, and intricate dependencies, deadlocks become insidious. They can:
* Cause parts of your system, or the entire system, to hang indefinitely.
* Be notoriously difficult to debug, as they often depend on specific timing and interleaving of operations, making them hard to reproduce.
* Lead to significantly reduced system throughput and responsiveness.
* Manifest intermittently, lurking in the codebase until specific, rare conditions trigger them.
The effort required to design, implement, and debug complex locking protocols correctly is substantial, often outweighing the perceived simplicity of using locks in the first place.
## The Guiding Principle: "Share Memory by Communicating"
To navigate the treacherous waters of shared-state concurrency and avoid the Scylla and Charybdis of race conditions and deadlocks, a powerful principle has emerged: "Don't communicate by sharing memory; instead, share memory by communicating." This maxim, popularized by Rob Pike, one of the creators of the Go programming language, encapsulates a fundamental shift in thinking about concurrent design.
The core idea is to minimize or eliminate mutable shared state. Instead of multiple threads contending for access to the same piece of data (protected by locks), data is owned by a single entity (a thread, a task, an actor). When other parts of the system need to interact with or modify that data, they do so by sending messages to its owner.
This pattern isn't just theoretical; it has a proven track record. For instance, the Android framework has long utilized a similar model with its `Handler` and `Looper` mechanism. UI operations and many other tasks are managed by posting messages to a specific thread's message queue, ensuring serialized access and preventing common concurrency issues. This philosophy is also central to languages like Erlang, renowned for its robust concurrent and distributed systems.
## Rust's Toolkit for Deadlock Avoidance: Async/Await and Channels
Rust is exceptionally well-equipped to implement the "share memory by communicating" paradigm. Its `async/await` feature allows for writing highly concurrent, non-blocking code in an ergonomic way. Complementing this are channels, which provide a mechanism for tasks to send messages to each other. Standard library channels (`std::sync::mpsc`) are available for thread-based communication, and asynchronous channels (e.g., from `tokio::sync::mpsc` or `async-std`) integrate seamlessly with `async` tasks.
By structuring concurrent logic around asynchronous tasks that communicate via channels, the need for `Mutex`es and other explicit locking mechanisms to protect shared state is drastically reduced. If there's no shared mutable state being accessed by multiple tasks simultaneously, there are fewer locks. And fewer locks mean a significantly lower probability of encountering deadlocks. Indeed, minimizing the use of `Mutex`es (and similar primitives like `RwLock`) for shared state is arguably the most effective strategy to reduce the likelihood of deadlocks in a Rust application.
### Performance Considerations: Channels vs. Mutexes in Rust
A common concern when adopting channel-based communication, especially for those accustomed to direct shared-state synchronization with mutexes, is the potential performance overhead. While it's true that sending a message through a channel involves more steps than acquiring a lock and accessing memory directly, the performance difference in Rust is often not as significant as one might fear for many common workloads.
It's important to consider the following:
* **Optimization:** Rust's standard library channels (`std::sync::mpsc`) and popular asynchronous channel implementations (e.g., from `tokio`, `async-std`, `flume`) are highly optimized. They are designed for efficiency and low overhead.
* **Contention:** Under high contention (many threads trying to access the same mutex), mutexes can lead to significant performance degradation due to lock contention, waiting, and context switching. Channels, by their nature, often serialize access and can sometimes manage contention more gracefully, potentially even outperforming mutexes in specific scenarios. For instance, a well-designed channel-based system might keep cores busier with useful work rather than waiting for locks.
* **Complexity vs. Raw Speed:** While a finely-tuned mutex implementation for a specific, critical hot path might offer the absolute peak performance, this often comes at the cost of increased complexity and a higher risk of concurrency bugs like deadlocks or race conditions (if not using Rust's safety guarantees perfectly). For the vast majority of application logic, the clarity, safety, and maintainability benefits of channels far outweigh marginal performance differences.
* **Benchmarking:** Performance is context-dependent. If you have a performance-critical section where you're choosing between mutexes and channels, the best approach is to benchmark both solutions under realistic load conditions for your specific use case. You might be surprised by the results.
* **Trade-offs:** In performance-first software, such as game engines, low-level system utilities, or high-frequency trading systems, the careful, expert use of mutexes (and other lock-free structures) might be unavoidable to squeeze out every last nanosecond. However, for general application development, web services, and many other domains, the robustness and simplicity offered by channels are usually a better trade-off.
**In summary:** Don't let premature optimization concerns about channel performance deter you from using them. Rust's channels are remarkably efficient. For most applications, the architectural advantages—easier reasoning, deadlock avoidance, and clearer data flow—provide far greater value. Unless profiling explicitly demonstrates that a channel is a critical bottleneck in a performance-sensitive path, prefer channels for their safety and simplicity.
## Formalizing the Pattern: The Actor Model
The "share memory by communicating" approach is formalized and generalized by the Actor Model. Conceived by Carl Hewitt in 1973, the actor model provides a conceptual foundation for concurrent computation. Its key tenets are:
* **Actors:** Everything is an actor. An actor is a primitive unit of computation that encapsulates state and behavior.
* **Private State:** Each actor maintains its own private state, which cannot be directly accessed or modified by other actors.
* **Mailbox:** Each actor has a mailbox to receive incoming messages.
* **Message Passing:** Actors communicate exclusively by sending asynchronous messages to each other's mailboxes.
* **Behavior:** Upon receiving a message, an actor can perform a limited set of actions:
* Send a finite number of messages to other actors (including itself).
* Create a finite number of new actors.
* Designate the behavior to be used for the next message it receives (effectively, changing its internal state and how it will react to future messages).
This model inherently promotes isolation and controlled interaction, making it a powerful tool for building robust concurrent systems.
## The Actor Model in Practice: In-Process Concurrency with Rust
While the actor model is well-known for its applicability in distributed systems (think Erlang/OTP), it is also an incredibly useful pattern for managing concurrency within a single process. Rust's `async` ecosystem provides an excellent foundation for implementing actors:
* An `async` task can naturally represent an actor.
* A channel can serve as the actor's mailbox.
* The actor's private state is simply the data owned by the task.
* Message handling logic is implemented within the task's main loop, processing messages received on its channel.
Libraries like `rsactor` (see `https://github.com/hiking90/rsactor`) provide simple and efficient in-process actor model implementations for Rust. They simplify the definition of actors, their state, message types, and message handling logic, allowing developers to focus on the application's business logic rather than the boilerplate of actor machinery. For example, you might define an actor that manages a specific resource or performs a particular computation, and other parts of your application would interact with it solely by sending it messages and, where appropriate, receiving responses via messages.
Here's a conceptual example using `rsactor`, demonstrating an actor with an `on_run` idle handler processing multiple tick sources:
```rust
use rsactor::{Actor, ActorRef, ActorWeak, message_handlers, spawn};
use anyhow::Result;
use tokio::time::{interval, Duration};
// Define actor struct
struct CounterActor {
count: u32, // Stores the counter value
tick_300ms: tokio::time::Interval, // 300ms interval timer
tick_1s: tokio::time::Interval, // 1 second interval timer
}
// Implement Actor trait for complex initialization
impl Actor for CounterActor {
type Args = (); // No arguments needed for this actor
type Error = anyhow::Error; // Define the error type for actor operations
// Initialize the actor with intervals
async fn on_start(_args: Self::Args, _actor_ref: &ActorRef<Self>) -> Result<Self, Self::Error> {
Ok(CounterActor {
count: 0,
tick_300ms: interval(Duration::from_millis(300)),
tick_1s: interval(Duration::from_secs(1)),
})
}
// Idle handler called when the message queue is empty.
// This demonstrates handling two independent, periodic events using tokio::select!.
async fn on_run(&mut self, _actor_weak: &ActorWeak<Self>) -> Result<bool, Self::Error> {
// Use the tokio::select! macro to handle the first completed asynchronous operation among several.
tokio::select! {
// Executes when the 300ms interval timer ticks.
_ = self.tick_300ms.tick() => {
self.count += 1; // Increment the counter value by 1.
}
// Executes when the 1s interval timer ticks. (Currently no specific action)
_ = self.tick_1s.tick() => {
// Could implement different behavior here
}
}
// Return Ok(true) to continue idle processing, Ok(false) to disable it
Ok(true)
}
}
// Define message types
struct IncrementMsg(u32); // Message to increment the counter
struct GetCountMsg; // Message to get the current count
// Use message_handlers macro with handler attributes (recommended approach)
#[message_handlers]
impl CounterActor {
#[handler]
async fn handle_increment(&mut self, msg: IncrementMsg, _: &ActorRef<Self>) -> u32 {
self.count += msg.0; // Increment the counter by the value specified in the message.
self.count // Return the new count
}
#[handler]
async fn handle_get_count(&mut self, _msg: GetCountMsg, _: &ActorRef<Self>) -> u32 {
self.count // Return the current count
}
}
#[tokio::main]
async fn main() -> Result<()> {
// Spawn the CounterActor and get an ActorRef and JoinHandle.
let (actor_ref, join_handle) = spawn::<CounterActor>(());
// Allow some time for the actor's on_run to emit a few ticks.
tokio::time::sleep(Duration::from_millis(1200)).await; // Wait for ~4 of 300ms ticks and ~1 of 1s ticks
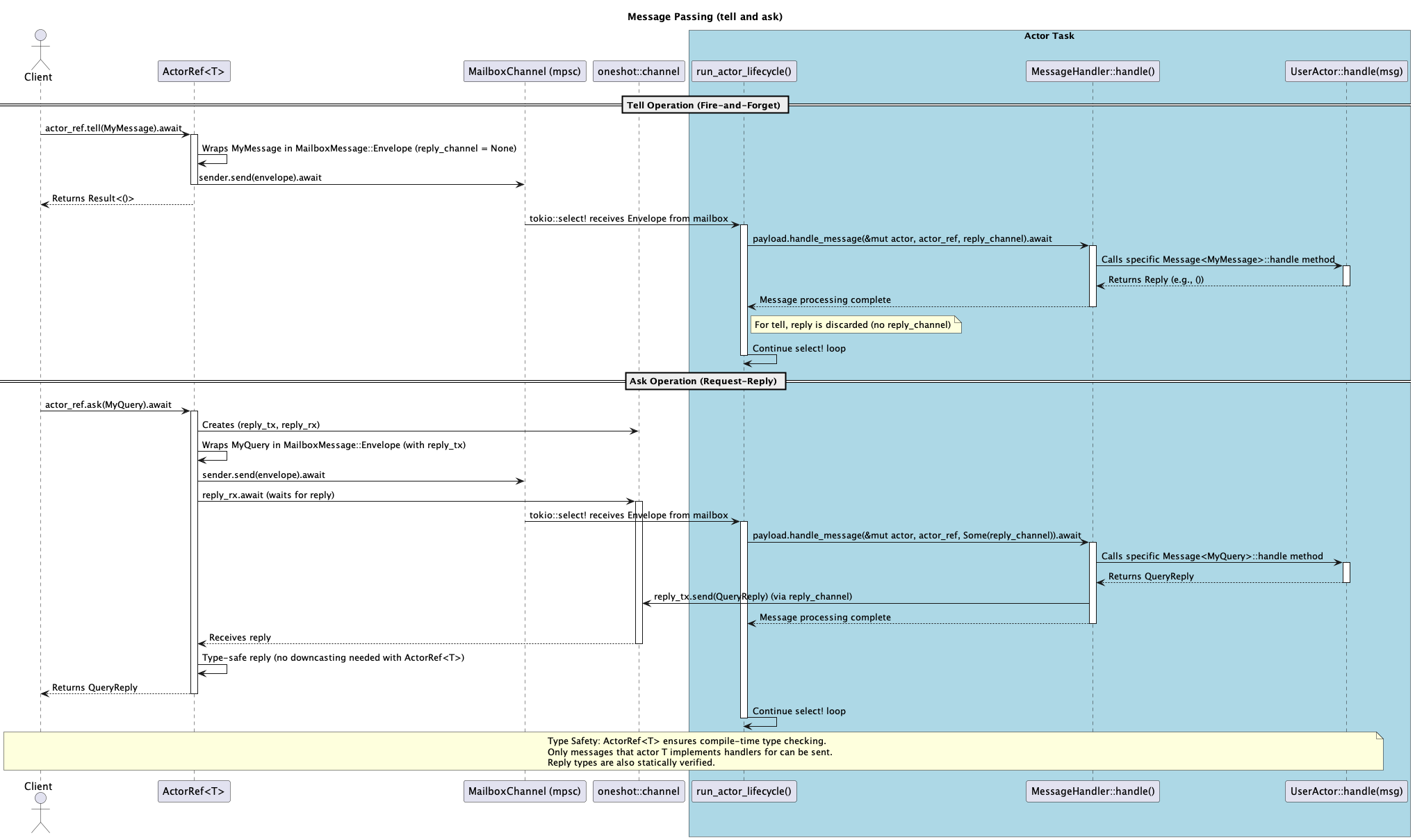
// Send an IncrementMsg to the actor to increment the counter by 5 and await the reply.
let new_count: u32 = actor_ref.ask(IncrementMsg(5)).await?;
println!("Count after increment: {}", new_count);
// Send a GetCountMsg to the actor to get the current count and await the reply.
let current_count: u32 = actor_ref.ask(GetCountMsg).await?;
println!("Current count: {}", current_count);
// Allow a little more time for ticks.
tokio::time::sleep(Duration::from_millis(700)).await;
// Send a GetCountMsg to the actor to get the final count and await the reply.
let final_count: u32 = actor_ref.ask(GetCountMsg).await?;
println!("Final count: {}", final_count);
// Gracefully stop the actor.
actor_ref.stop().await?; // Gracefully stop the actor
// Await the actor's termination using the join_handle and print the result.
let actor_result = join_handle.await?;
// Example of how to inspect the ActorResult
match actor_result {
rsactor::ActorResult::Completed { actor, killed } => {
println!(
"Main: CounterActor (ID: {}) task completed. Final state count: {}. Killed: {}",
actor_ref.identity(), // Print the ID of the stopped actor.
actor.count,
killed
);
}
rsactor::ActorResult::Failed { actor, error, phase, killed } => {
if let Some(actor_state) = actor {
println!(
"Main: CounterActor (ID: {}) task failed during phase {:?}. Final state count: {}. Error: {:?}. Killed: {}",
actor_ref.identity(),
phase,
actor_state.count,
error,
killed
);
} else {
println!(
"Main: CounterActor (ID: {}) task failed during phase {:?}. No actor state available. Error: {:?}. Killed: {}",
actor_ref.identity(),
phase,
error,
killed
);
}
}
}
Ok(())
}
```
In this example:
- `CounterActor` maintains a `count` and two interval timers as struct fields.
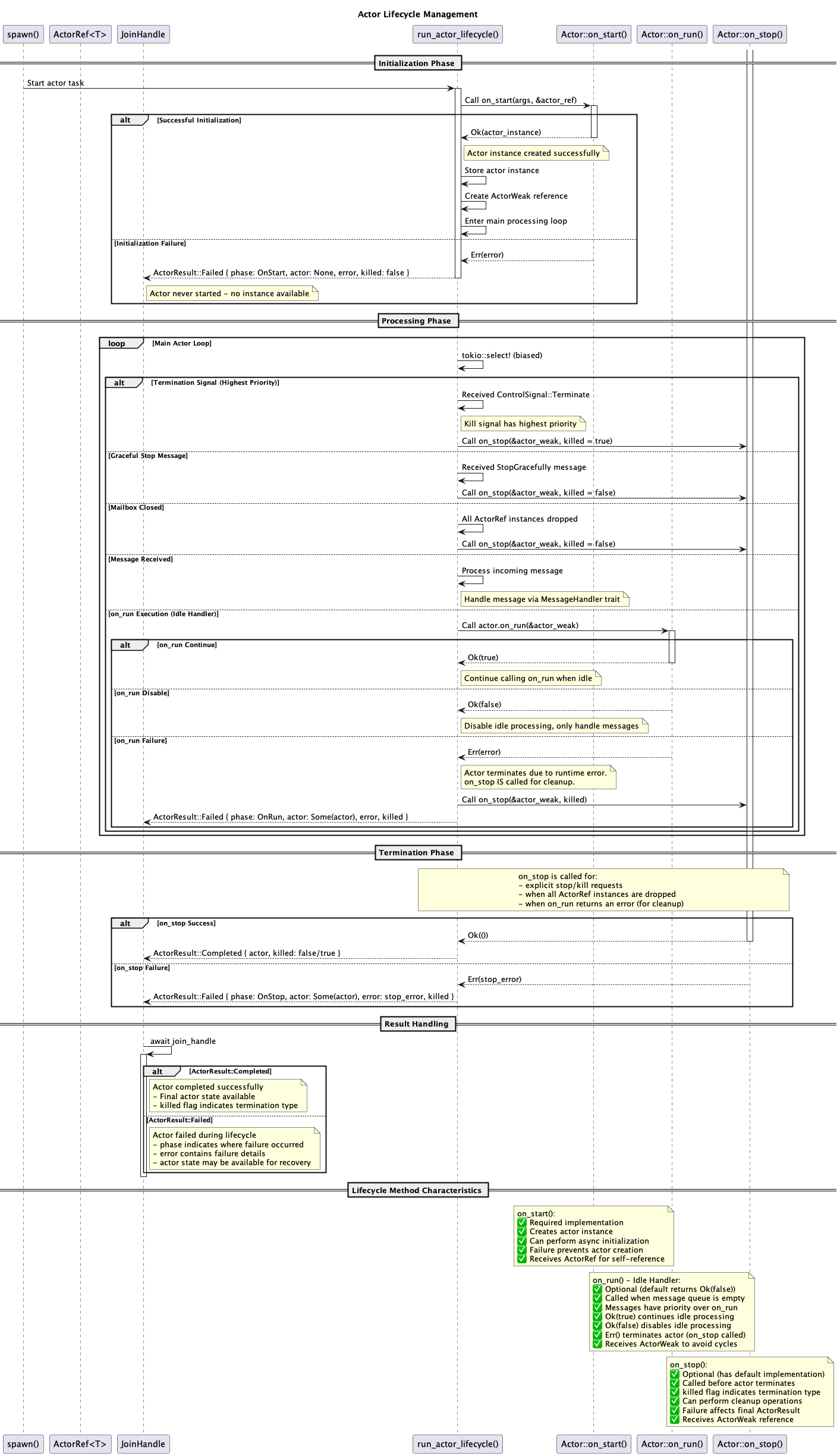
- The `Actor` trait is implemented:
- `on_start` initializes the actor with its state and interval timers.
- `on_run` is the idle handler, called when the message queue is empty. It uses `tokio::select!` to wait on two `tokio::time::interval` ticks (300ms and 1 second).
- The 300ms tick increments the actor's internal `count`.
- The 1s tick performs no specific action in this example.
- Return `Ok(true)` to continue idle processing, `Ok(false)` to disable it.
- Message types `IncrementMsg(u32)` and `GetCountMsg` are defined to interact with the counter.
- The `#[message_handlers]` macro with `#[handler]` attributes automatically generates `Message` trait implementations and `MessageHandler` trait implementation for these messages.
- The `main` function:
- Spawns the `CounterActor`.
- Waits briefly to allow the `on_run` idle handler to execute a few times.
- Sends `IncrementMsg` and `GetCountMsg` to interact with the actor, logging replies.
- Waits again for more ticks.
- Sends `GetCountMsg` again to observe changes from both messages and internal ticks.
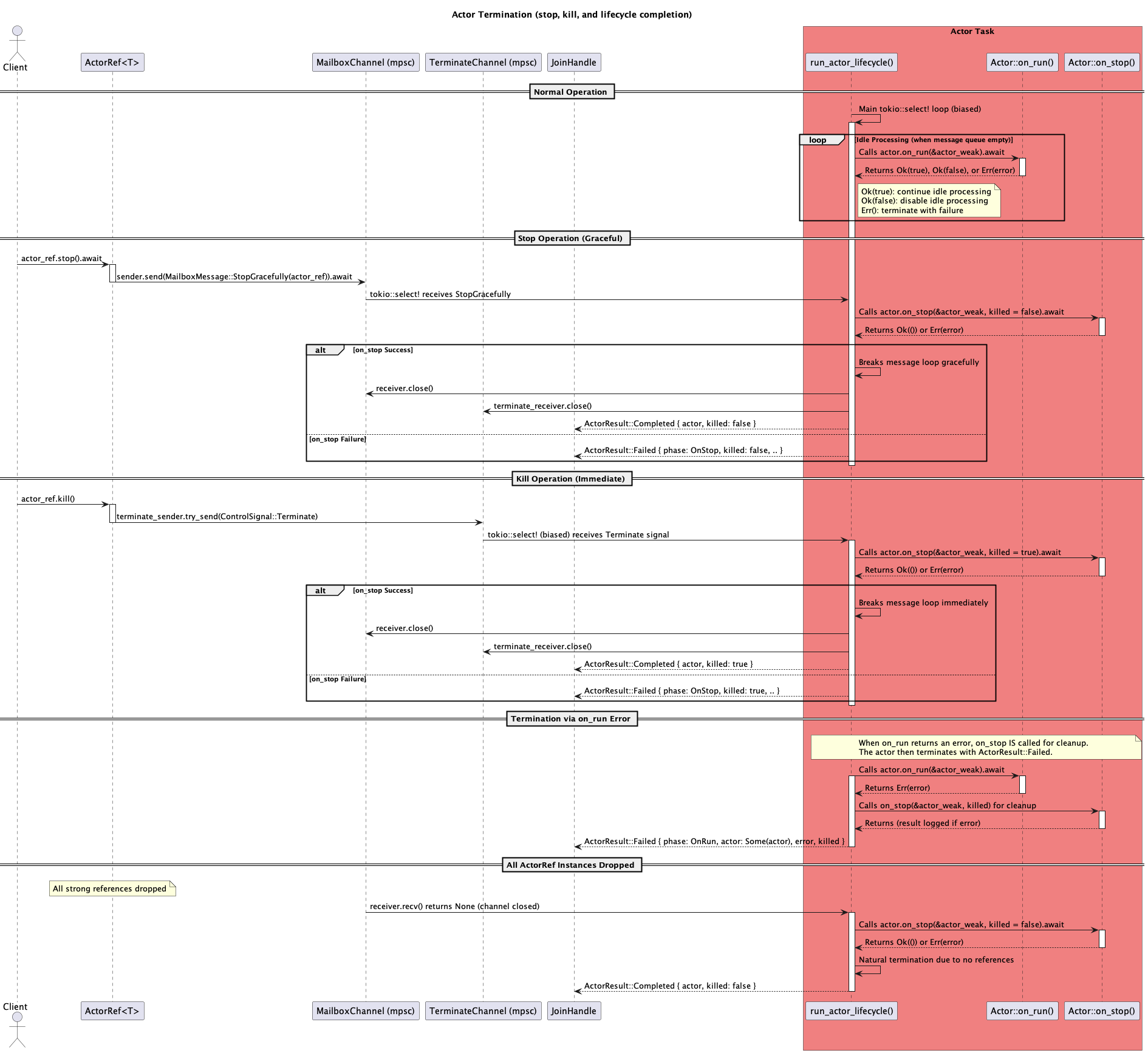
- Gracefully stops the actor using `actor_ref.stop()`.
- Awaits the actor's `join_handle` to ensure clean termination and logs the outcome.
This revised example aligns with the `rsactor` patterns shown in its `README.md` and `lib.rs` documentation, particularly showcasing how the `on_run` method serves as an idle handler that processes background tasks when the message queue is empty, a key feature of the in-process actor model.
## The Premier Choice for Mutex-Light Concurrency in Rust
When the goal is to build multi-threaded (or multi-tasked, in the `async` world) concurrent programs in Rust while minimizing the reliance on `Mutex`es for shared state, the actor model stands out as a premier architectural choice. By its very design, it guides developers towards systems where components are isolated and interact through well-defined message interfaces.
This approach doesn't just reduce the risk of deadlocks; it can also lead to systems that are:
* **Easier to reason about:** The state of an actor is local, and its interactions are explicit (messages).
* **More modular:** Actors are self-contained units.
* **More testable:** Individual actors can often be tested in isolation by sending them messages and observing their responses or side effects (like messages sent to other (mocked) actors).
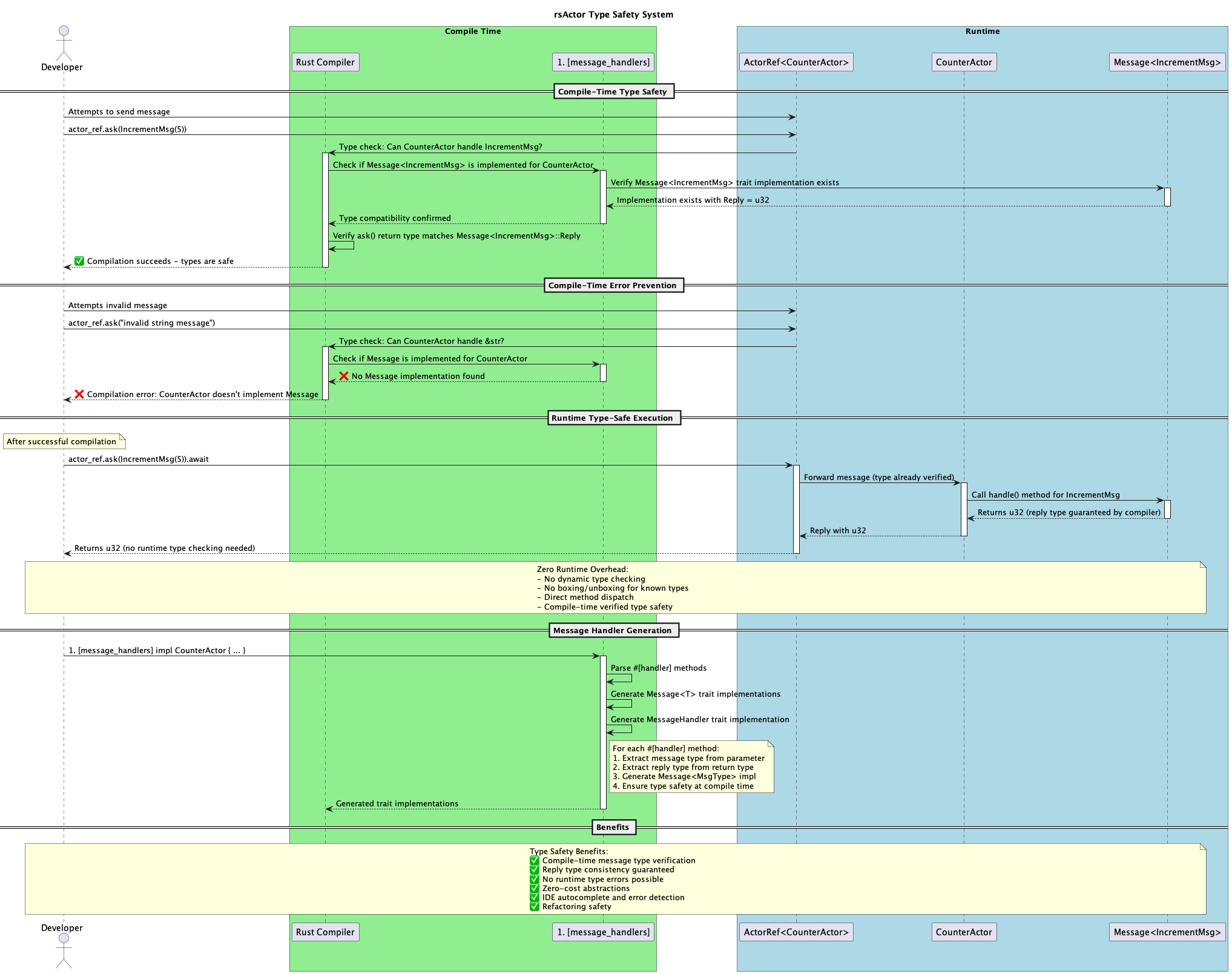
* **Type-safe:** Libraries like `rsactor` provide compile-time type safety through `ActorRef<T>`, and type-erased management through `ActorControl` trait and handler traits (`TellHandler`, `AskHandler`), ensuring message handling consistency while supporting flexible actor management patterns.
While `Mutex`es and other locking primitives still have their place for very fine-grained synchronization or specific low-level data structures, adopting an actor-based approach for the broader application architecture can significantly improve robustness and maintainability.
## Conclusion: Embracing Actors for Robust Concurrency
The landscape of software development is increasingly concurrent. While Rust provides groundbreaking safety features, the logical challenge of deadlocks in complex systems persists when relying heavily on traditional shared-state and locking mechanisms.
The actor model, with its emphasis on isolated state and message-passing communication ("share memory by communicating"), offers a compelling alternative. It provides a structured way to design concurrent applications that are inherently less prone to deadlocks and often easier to understand and maintain. With Rust's powerful `async` capabilities and simple, efficient in-process actor model implementations like `rsactor`, developers have the tools they need to build sophisticated, highly concurrent, and robust applications. By embracing the actor model, we can better navigate the complexities of concurrency and build more resilient software for the multi-core era.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}