#[repr(C)]pub struct Ray {
pub position: Vec3,
pub direction: Vec3,
}Expand description
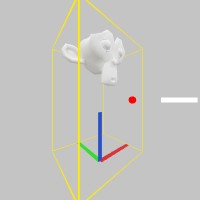
A position and a direction indicating a ray through space! This is a great tool for intersection testing with geometrical shapes. https://stereokit.net/Pages/StereoKit/Ray.html
§Examples
use stereokit_rust::{maths::{Vec3, Matrix, Ray}, model::Model, system::Lines,
mesh::Mesh, material::Material, util::named_colors};
let point = Mesh::sphere();
let mut material_point =Material::unlit();
let model = Model::from_file("center.glb", None).unwrap().copy();
let cube = Mesh::cube();
let mut material_cube =Material::ui_box();
material_cube.color_tint(named_colors::GOLD)
.border_size(0.05);
let center = Vec3::new(0.0, -2.5, -2.5);
let bounds = model.get_bounds();
let transform = Matrix::t_r(center, [0.0, 220.0, 0.0]);
let transform_cube = Matrix::t_s( bounds.center, bounds.dimensions) * transform;
let inv = transform.get_inverse();
let ray_x = Ray::new(Vec3{x:4.0, y: 0.0, z: -2.5}, Vec3::NEG_X);
let inv_ray_x = inv.transform_ray(ray_x);
let inv_contact_x = bounds.intersect(inv_ray_x).expect("should be a point of contact");
let contact_x = transform.transform_point(inv_contact_x);
let transform_point_x = Matrix::t_s(contact_x, Vec3::ONE * 0.3);
filename_scr = "screenshots/ray.jpeg";
test_screenshot!( // !!!! Get a proper main loop !!!!
model.draw(token, transform, None, None);
cube.draw(token, &material_cube, transform_cube, None, None);
Lines::add_ray(token, ray_x, 1.5, named_colors::WHITE, None, 0.2);
point.draw(token, &material_point, transform_point_x, Some(named_colors::RED.into()), None );
);
Fields§
§position: Vec3The position or origin point of the Ray.
direction: Vec3The direction the ray is facing, typically does not require being a unit vector, or normalized direction.
Implementations§
Source§impl Ray
impl Ray
Sourcepub fn new<V: Into<Vec3>>(pos: V, dir: V) -> Self
pub fn new<V: Into<Vec3>>(pos: V, dir: V) -> Self
Basic initialization constructor! Just copies the parameters into the fields. https://stereokit.net/Pages/StereoKit/Ray/Ray.html
- position - The position or origin point of the Ray.
- direction - The direction the ray is facing, typically does not require being a unit vector, or normalized direction.
§Examples
use stereokit_rust::maths::{Vec3, Ray};
let ray = Ray::new(Vec3::ZERO, Vec3::ONE);
let ray_b = Ray {position: Vec3::ZERO, direction: Vec3::ONE};
assert_eq!(ray, ray_b);Sourcepub fn from_to<V: Into<Vec3>>(a: V, b: V) -> Ray
pub fn from_to<V: Into<Vec3>>(a: V, b: V) -> Ray
A convenience function that creates a ray from point a, towards point b. Resulting direction is not normalized. https://stereokit.net/Pages/StereoKit/Ray/FromTo.html
- a - Ray starting point.
- b - Location the ray is pointing towards.
Returns a ray from point a to point b. Not normalized.
§Examples
use stereokit_rust::maths::{Vec3, Ray};
let ray = Ray::new(Vec3::ZERO, Vec3::ONE);
let ray_b = Ray::from_to( Vec3::ZERO, Vec3::ONE);
assert_eq!(ray, ray_b);Sourcepub fn get_at(&self, percent: f32) -> Vec3
pub fn get_at(&self, percent: f32) -> Vec3
Gets a point along the ray! This is basically just position + direction*percent. If Ray.direction is normalized, then percent is functionally distance, and can be used to find the point a certain distance out along the ray. https://stereokit.net/Pages/StereoKit/Ray/At.html
- percent - How far along the ray should we get the point at? This is in multiples of self.direction’s magnitude. If self.direction is normalized, this is functionally the distance.
Returns the point at position + direction*percent
§Examples
use stereokit_rust::maths::{Vec3, Ray};
let ray = Ray::new(Vec3::ZERO, Vec3::ONE);
assert_eq!(ray.get_at(3.0), Vec3::ONE * 3.0);Sourcepub fn closest<V: Into<Vec3>>(&self, to: V) -> Vec3
pub fn closest<V: Into<Vec3>>(&self, to: V) -> Vec3
Calculates the point on the Ray that’s closest to the given point! This will be clamped if the point is behind the ray’s origin. https://stereokit.net/Pages/StereoKit/Ray/Closest.html
- to - Any point in the same coordinate space as the Ray.
Returns the point on the ray that’s closest to the given point.
see also ray_point_closest
§Examples
use stereokit_rust::maths::{Vec3, Plane, Ray};
let ray = Ray::new(Vec3::ZERO, Vec3::ONE);
assert_eq!(ray.closest(Vec3::Z), Vec3::ONE / 3.0);Sourcepub fn intersect_plane(&self, plane: Plane) -> Option<Vec3>
pub fn intersect_plane(&self, plane: Plane) -> Option<Vec3>
Checks the intersection of this ray with a plane! https://stereokit.net/Pages/StereoKit/Ray/Intersect.html
- plane - Any plane you want to intersect with.
Returns intersection point if there’s an intersection information or None if there’s no intersection
see also plane_ray_intersect same as Plane::intersect
§Examples
use stereokit_rust::maths::{Vec3, Plane, Ray};
let ray = Ray::new(Vec3::ZERO, Vec3::ONE);
let plane = Plane::new(Vec3::NEG_Y, 2.5);
assert_eq!(ray.intersect_plane(plane), Some(Vec3::ONE * 2.5));Sourcepub fn intersect_sphere(&self, sphere: Sphere) -> Option<Vec3>
pub fn intersect_sphere(&self, sphere: Sphere) -> Option<Vec3>
Checks the intersection of this ray with a sphere! https://stereokit.net/Pages/StereoKit/Ray/Intersect.html
- sphere - Any sphere you want to intersect with.
Returns the closest intersection point to the ray origin if there’s an intersection information or None if
there’s no intersection
see also sphere_ray_intersect same as Sphere::intersect
§Examples
use stereokit_rust::maths::{Vec3, Sphere, Ray};
let ray = Ray::new(Vec3::ZERO, Vec3::ONE);
let sphere = Sphere::new(Vec3::Y, 0.5);
assert_eq!(ray.intersect_sphere(sphere), Some(Vec3::ONE * 0.5));Sourcepub fn intersect_bounds(&self, bounds: Bounds) -> Option<Vec3>
pub fn intersect_bounds(&self, bounds: Bounds) -> Option<Vec3>
Checks the intersection of this ray with a bounding box! https://stereokit.net/Pages/StereoKit/Ray/Intersect.html
- bounds - Any bounds you want to intersect with.
Returns the closest intersection point to the ray origin if there’s an intersection information or None if
there’s no intersection
see also bounds_ray_intersect same as Bounds::intersect
§Examples
use stereokit_rust::maths::{Vec3, Bounds, Matrix, Ray};
// A cube of 1 meter per side at this position, aligned with x y and z axis.
let box_transform = Matrix::t([10.0, 1.0, 2.0]);
let box_bounds = Bounds::bounds_centered([1.0,1.0,1.0]);
let inv = box_transform.get_inverse();
let ray1 = inv.transform_ray(Ray::new([10.2, 1.3, 2.4],[0.0, 1.0, 0.0]));
let ray2 = inv.transform_ray(Ray::new([10.9, 1.8, 2.6],[0.0, 0.0, 1.0]));
let ray3 = inv.transform_ray(Ray::new([10.5, 2.0, 2.7],[1.0, 0.0, 1.0]));
assert!(ray1.intersect_bounds(box_bounds).is_some(), "should be a point of contact");
assert_eq!(ray2.intersect_bounds(box_bounds), None);
assert_eq!(ray3.intersect_bounds(box_bounds), None);
// We want the contact point for ray1
let contact_point = box_bounds.intersect(ray1)
.expect ("There should be a point of contact");
let contact_point = box_transform.transform_point(contact_point);
assert_eq!(contact_point, [10.2, 1.3, 2.4 ].into());Sourcepub fn intersect_mesh(
&self,
mesh: &Mesh,
cull: Option<Cull>,
) -> Option<(Vec3, VindT)>
pub fn intersect_mesh( &self, mesh: &Mesh, cull: Option<Cull>, ) -> Option<(Vec3, VindT)>
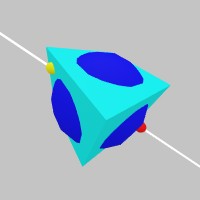
Checks the intersection point of this ray and a Mesh with collision data stored on the CPU. A mesh without collision data will always return false. Ray must be in model space, intersection point will be in model space too. You can use the inverse of the mesh’s world transform matrix to bring the ray into model space, see the example in the docs! https://stereokit.net/Pages/StereoKit/Ray/Intersect.html
- mesh - A mesh containing collision data on the CPU. You can check this with mesh.get_keep_data().
- cull - If None has default value of Cull::Back.
Returns a tuple with
- The intersection point of the ray and the mesh, if an intersection occurs. This is in model space, and must be transformed back into world space later.
- The indice of the mesh where the intersection occurs.
see also mesh_ray_intersect Ray::intersect_mesh_to_ptr same as Mesh::intersect
§Examples
use stereokit_rust::{maths::{Vec3, Matrix, Quat, Ray}, system::Lines,
util::{named_colors}, mesh::Mesh, material::{Material, Cull}};
// Create Meshes
let cube = Mesh::generate_cube(Vec3::ONE * 0.8, None);
let sphere = Mesh::generate_sphere(1.0, Some(4));
let material = Material::pbr().copy();
let transform = Matrix::r(Quat::from_angles(40.0, 50.0, 20.0));
let inv = transform.get_inverse();
let ray = Ray::new([-3.0, 2.0, 0.5 ], [3.0, -2.0, -0.25]);
let inv_ray = inv.transform_ray(ray);
let (contact_sphere, ind_sphere) = inv_ray.intersect_mesh( &sphere, Some(Cull::Front))
.expect("Ray should touch sphere");
let (contact_cube, ind_cube) = inv_ray.intersect_mesh( &cube, Some(Cull::Back))
.expect("Ray should touch cube");
assert_eq!(ind_sphere, 672);
assert_eq!(ind_cube, 9);
let transform_contact_sphere = Matrix::t_s(
transform.transform_point(contact_sphere), Vec3::ONE * 0.1);
let transform_contact_cube = Matrix::t_s(
transform.transform_point(contact_cube), Vec3::ONE * 0.1);
filename_scr = "screenshots/intersect_meshes.jpeg";
test_screenshot!( // !!!! Get a proper main loop !!!!
cube.draw(token, &material, transform, Some(named_colors::CYAN.into()), None);
sphere.draw(token, &material, transform, Some(named_colors::BLUE.into()), None);
Lines::add_ray(token, ray, 2.2, named_colors::WHITE, None, 0.02);
sphere.draw(token, &material, transform_contact_cube,
Some(named_colors::YELLOW.into()), None );
sphere.draw(token, &material, transform_contact_sphere,
Some(named_colors::RED.into()), None );
);
Sourcepub fn intersect_mesh_to_ptr(
&self,
mesh: &Mesh,
cull: Option<Cull>,
out_model_space_at: *mut Ray,
out_start_inds: *mut u32,
) -> bool
pub fn intersect_mesh_to_ptr( &self, mesh: &Mesh, cull: Option<Cull>, out_model_space_at: *mut Ray, out_start_inds: *mut u32, ) -> bool
Checks the intersection point of this ray and a Mesh with collision data stored on the CPU. A mesh without collision data will always return false. Ray must be in model space, intersection point will be in model space too. You can use the inverse of the mesh’s world transform matrix to bring the ray into model space, see the example in the docs! https://stereokit.net/Pages/StereoKit/Ray/Intersect.html
- mesh - A mesh containing collision data on the CPU. You can check this with mesh.get_keep_data()
- out_model_space_at - The intersection point and surface direction of the ray and the mesh, if an intersection occurs. This is in model space, and must be transformed back into world space later. Direction is not guaranteed to be normalized, especially if your own model->world transform contains scale/skew in it.
- out_start_inds - The index of the first index of the triangle that was hit
- cull - How should intersection work with respect to the direction the triangles are facing? Should we skip triangles that are facing away from the ray, or don’t skip anything? A good default would be Cull.Back. If None has default value of Cull::Back.
Returns true if an intersection occurs, false otherwise!
see also mesh_ray_intersect Ray::intersect_mesh same as Mesh::intersect_to_ptr
§Examples
use stereokit_rust::{maths::{Vec3, Matrix, Quat, Ray}, system::Lines,
util::{named_colors}, mesh::Mesh, material::{Material, Cull}};
// Create Meshes
let cube = Mesh::generate_cube(Vec3::ONE * 0.8, None);
let sphere = Mesh::generate_sphere(1.0, Some(4));
let material = Material::pbr().copy();
let transform = Matrix::r(Quat::from_angles(40.0, 50.0, 20.0));
let inv = transform.get_inverse();
let ray = Ray::new([-3.0, 2.0, 0.5 ], [3.0, -2.0, -0.25]);
let inv_ray = inv.transform_ray(ray);
let (mut contact_sphere_ray, mut ind_sphere) = (Ray::default(), 0u32);
assert!(inv_ray.intersect_mesh_to_ptr(
&sphere, Some(Cull::Front),
&mut contact_sphere_ray, &mut ind_sphere)
,"Ray should touch sphere");
let (mut contact_cube_ray, mut ind_cube) = (Ray::default(), 0u32);
assert!( inv_ray.intersect_mesh_to_ptr(
&cube, Some(Cull::Back),
&mut contact_cube_ray, &mut ind_cube)
,"Ray should touch cube");
assert_eq!(ind_sphere, 672);
assert_eq!(ind_cube, 9);
assert_eq!(transform.transform_ray(contact_sphere_ray),
Ray { position: Vec3 { x: 0.36746234, y: -0.244975, z: 0.21937825 },
direction: Vec3 { x: 0.58682406, y: -0.6427875, z: 0.49240398 }});
assert_eq!(transform.transform_ray(contact_cube_ray),
Ray { position: Vec3 { x: -0.39531866, y: 0.26354572, z: 0.2829433 },
direction: Vec3 { x: -0.77243483, y: -0.2620026, z: 0.57853174 } });Sourcepub fn intersect_model(&self, model: &Model, cull: Option<Cull>) -> Option<Vec3>
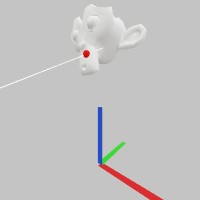
pub fn intersect_model(&self, model: &Model, cull: Option<Cull>) -> Option<Vec3>
Checks the intersection point of this ray and the Solid flagged Meshes in the Model’s visual nodes. Ray must be in model space, intersection point will be in model space too. You can use the inverse of the mesh’s world transform matrix to bring the ray into model space, see the example in the docs! https://stereokit.net/Pages/StereoKit/Ray/Intersect.html
- model - Any Model that may or may not contain Solid flagged nodes, and Meshes with collision data.
- cull - If None has default value of Cull::Back.
Returns the intersection point of the ray and the model, if an intersection occurs. This is in model space, and
must be transformed back into world space later.
see also model_ray_intersect Ray::intersect_model_to_ptr same as Model::intersect
§Examples
use stereokit_rust::{maths::{Vec3, Matrix, Ray}, model::Model, system::Lines,
mesh::Mesh, material::{Material, Cull}, util::named_colors};
let model = Model::from_file("center.glb", None).unwrap().copy();
let transform = Matrix::t_r([0.0,-2.25,-2.00], [0.0, 140.0, 0.0]);
let inv_ray = Ray::new([1.0, 2.0, -3.0], [-1.5, 2.0, 3.0]);
let contact_model = inv_ray.intersect_model( &model, Some(Cull::Back))
.expect("Ray should touch model");
let ray = transform.transform_ray(inv_ray);
let transform_contact_model = Matrix::t(transform.transform_point(contact_model));
let point = Mesh::generate_sphere(0.2, Some(2));
let material = Material::pbr();
filename_scr = "screenshots/intersect_model.jpeg";
test_screenshot!( // !!!! Get a proper main loop !!!!
model.draw(token, transform, None, None);
Lines::add_ray(token, ray, 1.2, named_colors::WHITE, None, 0.02);
point.draw(token, &material, transform_contact_model,
Some(named_colors::RED.into()), None );
);
Sourcepub fn intersect_model_to_ptr(
&self,
model: &Model,
cull: Option<Cull>,
out_model_space_at: *mut Ray,
) -> bool
pub fn intersect_model_to_ptr( &self, model: &Model, cull: Option<Cull>, out_model_space_at: *mut Ray, ) -> bool
Checks the intersection point of this ray and the Solid flagged Meshes in the Model’s visual nodes. Ray must be in model space, intersection point will be in model space too. You can use the inverse of the mesh’s world transform matrix to bring the ray into model space, see the example in the docs! https://stereokit.net/Pages/StereoKit/Ray/Intersect.html
- model - Any Model that may or may not contain Solid flagged nodes, and Meshes with collision data.
- cull - If None has default value of Cull::Back.
- out_model_space_at - The intersection point and surface direction of the ray and the model, if an intersection occurs. This is in model space, and must be transformed back into world space later. Direction is not guaranteed to be normalized, especially if your own model->world transform contains scale/skew in it.
Returns - true if an intersection occurs, false otherwise!
see also model_ray_intersect Ray::intersect_model same as Model::intersect_to_ptr
§Examples
use stereokit_rust::{maths::{Vec3, Matrix, Ray}, model::Model,
mesh::Mesh, material::{Material, Cull}, util::named_colors};
let model = Model::from_file("center.glb", None).unwrap().copy();
let transform = Matrix::t_r([0.0,-2.25,-2.00], [0.0, 140.0, 0.0]);
let inv_ray = Ray::new([1.0, 2.0, -3.0], [-1.5, 2.0, 3.0]);
let mut inv_contact_model_ray = Ray::default();
assert!(inv_ray.intersect_model_to_ptr( &model, Some(Cull::Back), &mut inv_contact_model_ray)
,"Ray should touch model");
let contact_model_ray = transform.transform_ray(inv_contact_model_ray);
assert_eq!(contact_model_ray,
Ray { position: Vec3 { x: -0.3688636, y: 1.2613544, z: -1.3526915 },
direction: Vec3 { x: -0.4004621, y: -0.016381653, z: 0.9161662 } });Trait Implementations§
Source§impl Display for Ray
impl Display for Ray
Source§fn fmt(&self, f: &mut Formatter<'_>) -> Result
fn fmt(&self, f: &mut Formatter<'_>) -> Result
Creates a text description of the Ray, in the format of “[position:X direction:X]” https://stereokit.net/Pages/StereoKit/Ray/ToString.html
§Examples
use stereokit_rust::maths::{Vec3, Ray};
let ray = Ray::new([1.1, 2.0, 3.0], [4.0, 5.0, 6.0]);
assert_eq!(format!("{}", ray),
"[position:[x:1.1, y:2, z:3] direction:[x:4, y:5, z:6]]");Source§impl Mul<Matrix> for Ray
Transforms a Ray by the Matrix! The position and direction are both multiplied by the matrix, accounting properly for
which should include translation, and which should not.
https://stereokit.net/Pages/StereoKit/Matrix/op_Multiply.html
impl Mul<Matrix> for Ray
Transforms a Ray by the Matrix! The position and direction are both multiplied by the matrix, accounting properly for which should include translation, and which should not. https://stereokit.net/Pages/StereoKit/Matrix/op_Multiply.html
see also matrix_transform_ray
Source§fn mul(self, rhs: Matrix) -> Self::Output
fn mul(self, rhs: Matrix) -> Self::Output
§Examples
use stereokit_rust::maths::{Vec3, Matrix, Ray};
let transform = Matrix::t([1.0, 2.0, 3.0]);
let ray = Ray::new([0.0, 0.0, 0.0], [1.0, 0.0, 0.0]);
let transformed_ray = ray * transform;
assert_eq!(transformed_ray, Ray::new([1.0, 2.0, 3.0], [1.0, 0.0, 0.0]));Source§impl Mul<Ray> for Matrix
Transforms a Ray by the Matrix! The position and direction are both multiplied by the matrix, accounting properly for
which should include translation, and which should not.
https://stereokit.net/Pages/StereoKit/Matrix/op_Multiply.html
impl Mul<Ray> for Matrix
Transforms a Ray by the Matrix! The position and direction are both multiplied by the matrix, accounting properly for which should include translation, and which should not. https://stereokit.net/Pages/StereoKit/Matrix/op_Multiply.html
see also matrix_transform_ray
Source§fn mul(self, rhs: Ray) -> Self::Output
fn mul(self, rhs: Ray) -> Self::Output
§Examples
use stereokit_rust::maths::{Vec3, Matrix, Ray};
let transform = Matrix::t([1.0, 2.0, 3.0]);
let ray = Ray::new([0.0, 0.0, 0.0], [1.0, 0.0, 0.0]);
let transformed_ray = transform * ray;
assert_eq!(transformed_ray, Ray::new([1.0, 2.0, 3.0], [1.0, 0.0, 0.0]));Source§impl MulAssign<Matrix> for Ray
Transforms a Ray by the Matrix! The position and direction are both multiplied by the matrix, accounting properly for
which should include translation, and which should not.
https://stereokit.net/Pages/StereoKit/Matrix/op_Multiply.html
impl MulAssign<Matrix> for Ray
Transforms a Ray by the Matrix! The position and direction are both multiplied by the matrix, accounting properly for which should include translation, and which should not. https://stereokit.net/Pages/StereoKit/Matrix/op_Multiply.html
see also matrix_transform_ray
Source§fn mul_assign(&mut self, rhs: Matrix)
fn mul_assign(&mut self, rhs: Matrix)
use stereokit_rust::maths::{Vec3, Matrix, Ray};
let mut ray = Ray::new([0.0, 0.0, 0.0], [1.0, 0.0, 0.0]);
let transform = Matrix::t([1.0, 2.0, 3.0]);
ray *= transform;
assert_eq!(ray, Ray::new([1.0, 2.0, 3.0], [1.0, 0.0, 0.0]));impl Copy for Ray
impl StructuralPartialEq for Ray
Auto Trait Implementations§
impl Freeze for Ray
impl RefUnwindSafe for Ray
impl Send for Ray
impl Sync for Ray
impl Unpin for Ray
impl UnwindSafe for Ray
Blanket Implementations§
Source§impl<T> BorrowMut<T> for Twhere
T: ?Sized,
impl<T> BorrowMut<T> for Twhere
T: ?Sized,
Source§fn borrow_mut(&mut self) -> &mut T
fn borrow_mut(&mut self) -> &mut T
Source§impl<T> CloneToUninit for Twhere
T: Clone,
impl<T> CloneToUninit for Twhere
T: Clone,
Source§impl<T> Downcast for Twhere
T: Any,
impl<T> Downcast for Twhere
T: Any,
Source§fn into_any(self: Box<T>) -> Box<dyn Any>
fn into_any(self: Box<T>) -> Box<dyn Any>
Box<dyn Trait> (where Trait: Downcast) to Box<dyn Any>. Box<dyn Any> can
then be further downcast into Box<ConcreteType> where ConcreteType implements Trait.Source§fn into_any_rc(self: Rc<T>) -> Rc<dyn Any>
fn into_any_rc(self: Rc<T>) -> Rc<dyn Any>
Rc<Trait> (where Trait: Downcast) to Rc<Any>. Rc<Any> can then be
further downcast into Rc<ConcreteType> where ConcreteType implements Trait.Source§fn as_any(&self) -> &(dyn Any + 'static)
fn as_any(&self) -> &(dyn Any + 'static)
&Trait (where Trait: Downcast) to &Any. This is needed since Rust cannot
generate &Any’s vtable from &Trait’s.Source§fn as_any_mut(&mut self) -> &mut (dyn Any + 'static)
fn as_any_mut(&mut self) -> &mut (dyn Any + 'static)
&mut Trait (where Trait: Downcast) to &Any. This is needed since Rust cannot
generate &mut Any’s vtable from &mut Trait’s.