pub struct Transform3D {
pub translation: Option<SerializedComponentBatch>,
pub rotation_axis_angle: Option<SerializedComponentBatch>,
pub quaternion: Option<SerializedComponentBatch>,
pub scale: Option<SerializedComponentBatch>,
pub mat3x3: Option<SerializedComponentBatch>,
pub relation: Option<SerializedComponentBatch>,
pub child_frame: Option<SerializedComponentBatch>,
pub parent_frame: Option<SerializedComponentBatch>,
}Expand description
Archetype: A transform between two 3D spaces, i.e. a pose.
From the point of view of the entity’s coordinate system, all components are applied in the inverse order they are listed here. E.g. if both a translation and a mat3x3 transform are present, the 3x3 matrix is applied first, followed by the translation.
Whenever you log this archetype, the state of the resulting transform relationship is fully reset to the new archetype. This means that if you first log a transform with only a translation, and then log one with only a rotation, it will be resolved to a transform with only a rotation. (This is unlike how we usually apply latest-at semantics on an archetype where we take the latest state of any component independently)
For transforms that affect only a single entity and do not propagate along the entity tree refer to archetypes::InstancePoses3D.
§Examples
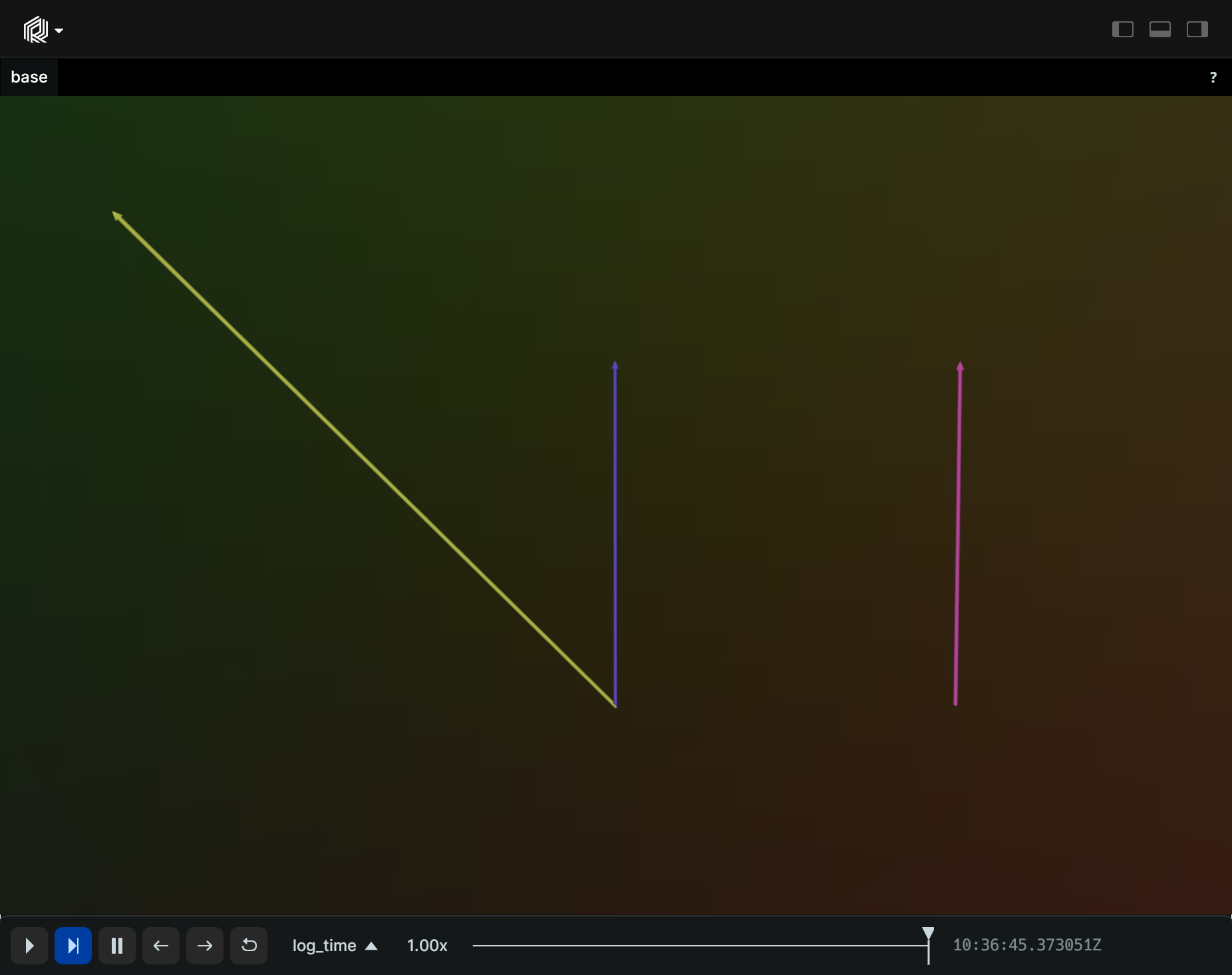
§Variety of 3D transforms
use std::f32::consts::TAU;
fn main() -> Result<(), Box<dyn std::error::Error>> {
let rec = rerun::RecordingStreamBuilder::new("rerun_example_transform3d")
.spawn()?;
let arrow = rerun::Arrows3D::from_vectors([(0.0, 1.0, 0.0)])
.with_origins([(0.0, 0.0, 0.0)]);
rec.log("base", &arrow)?;
rec.log(
"base/translated",
&rerun::Transform3D::from_translation([1.0, 0.0, 0.0]),
)?;
rec.log("base/translated", &arrow)?;
rec.log(
"base/rotated_scaled",
&rerun::Transform3D::from_rotation_scale(
rerun::RotationAxisAngle::new(
[0.0, 0.0, 1.0],
rerun::Angle::from_radians(TAU / 8.0),
),
rerun::Scale3D::from(2.0),
),
)?;
rec.log("base/rotated_scaled", &arrow)?;
Ok(())
}
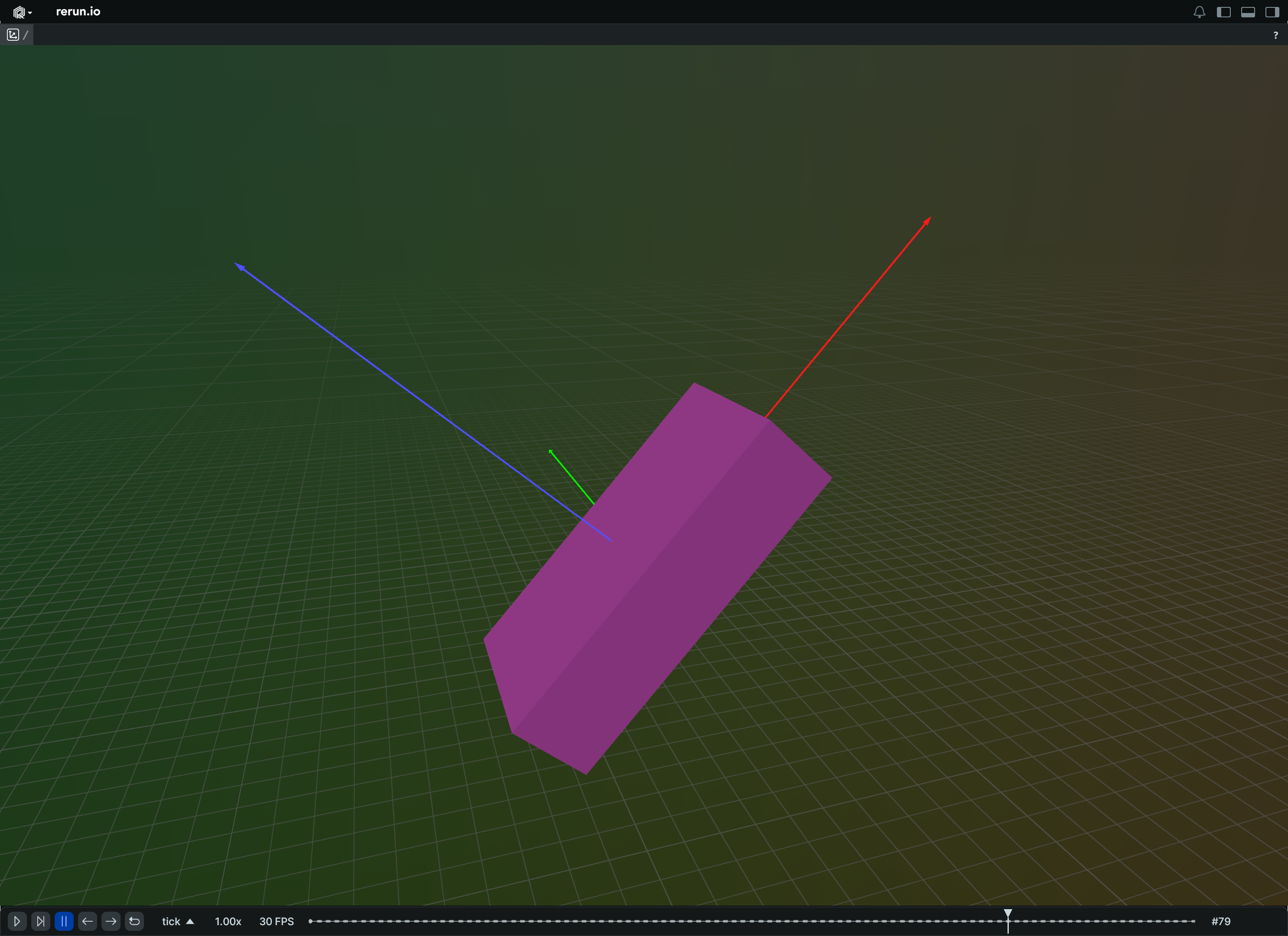
§Update a transform over time
fn main() -> Result<(), Box<dyn std::error::Error>> {
let rec = rerun::RecordingStreamBuilder::new(
"rerun_example_transform3d_row_updates",
)
.spawn()?;
rec.set_time_sequence("tick", 0);
rec.log(
"box",
&[
&rerun::Boxes3D::from_half_sizes([(4.0, 2.0, 1.0)])
.with_fill_mode(rerun::FillMode::Solid)
as &dyn rerun::AsComponents,
&rerun::TransformAxes3D::new(10.0),
],
)?;
for t in 0..100 {
rec.set_time_sequence("tick", t + 1);
rec.log(
"box",
&rerun::Transform3D::default()
.with_translation([0.0, 0.0, t as f32 / 10.0])
.with_rotation(rerun::RotationAxisAngle::new(
[0.0, 1.0, 0.0],
rerun::Angle::from_radians(truncated_radians(
(t * 4) as f32,
)),
)),
)?;
}
Ok(())
}
fn truncated_radians(deg: f32) -> f32 {
((deg.to_radians() * 1000.0) as i32) as f32 / 1000.0
}
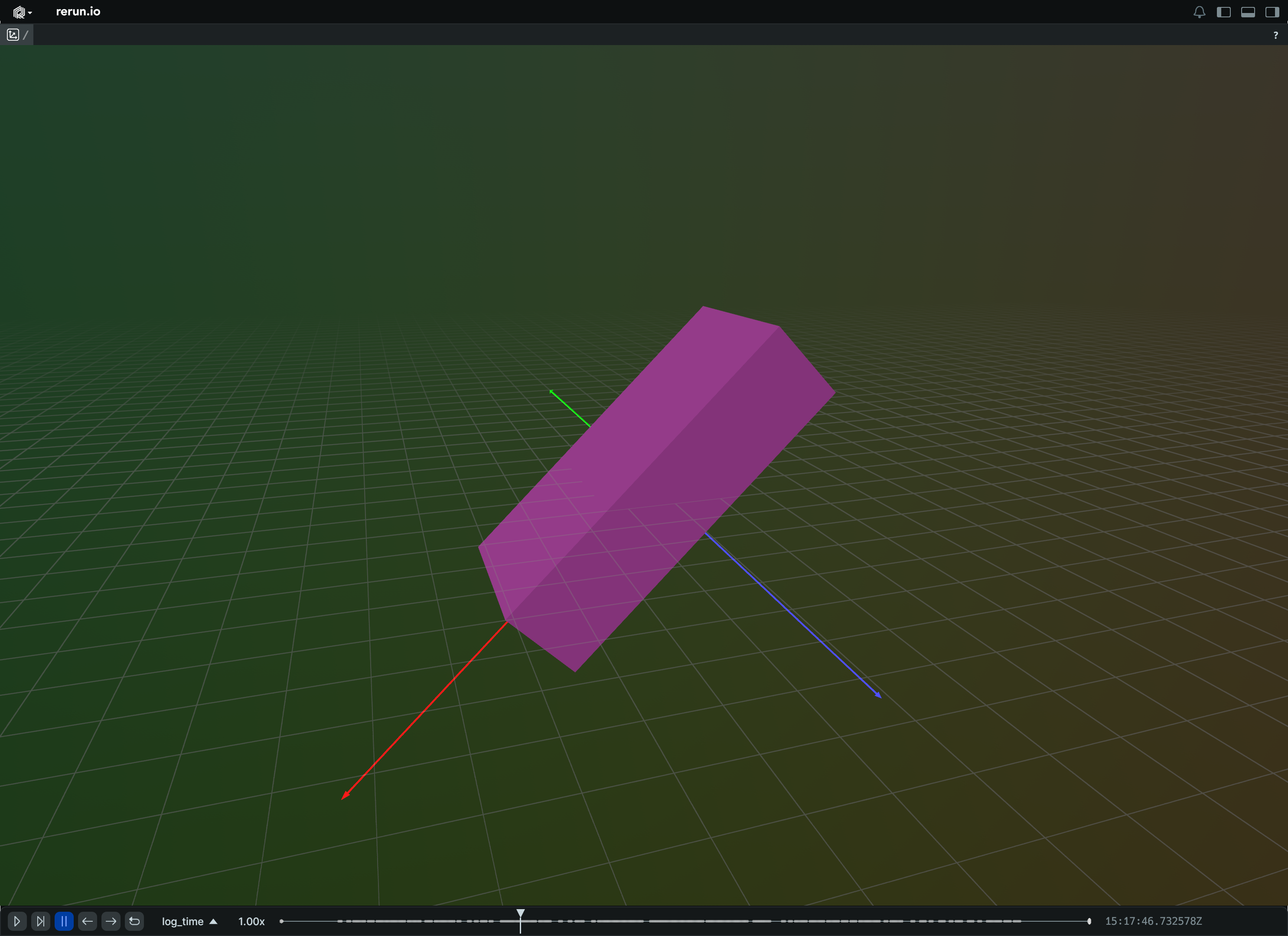
§Update a transform over time, in a single operation
fn main() -> Result<(), Box<dyn std::error::Error>> {
let rec = rerun::RecordingStreamBuilder::new(
"rerun_example_transform3d_column_updates",
)
.spawn()?;
rec.set_time_sequence("tick", 0);
rec.log(
"box",
&[
&rerun::Boxes3D::from_half_sizes([(4.0, 2.0, 1.0)])
.with_fill_mode(rerun::FillMode::Solid)
as &dyn rerun::AsComponents,
&rerun::TransformAxes3D::new(10.0),
],
)?;
let translations = (0..100).map(|t| [0.0, 0.0, t as f32 / 10.0]);
let rotations =
(0..100)
.map(|t| truncated_radians((t * 4) as f32))
.map(|rad| {
rerun::RotationAxisAngle::new(
[0.0, 1.0, 0.0],
rerun::Angle::from_radians(rad),
)
});
let ticks = rerun::TimeColumn::new_sequence("tick", 1..101);
rec.send_columns(
"box",
[ticks],
rerun::Transform3D::default()
.with_many_translation(translations)
.with_many_rotation_axis_angle(rotations)
.columns_of_unit_batches()?,
)?;
Ok(())
}
fn truncated_radians(deg: f32) -> f32 {
((deg.to_radians() * 1000.0) as i32) as f32 / 1000.0
}§Update specific properties of a transform over time
use rerun::AsComponents;
fn main() -> Result<(), Box<dyn std::error::Error>> {
let rec = rerun::RecordingStreamBuilder::new(
"rerun_example_transform3d_partial_updates",
)
.spawn()?;
// Set up a 3D box.
rec.log(
"box",
&[&rerun::Boxes3D::from_half_sizes([(4.0, 2.0, 1.0)])
.with_fill_mode(rerun::FillMode::Solid)
as &dyn AsComponents],
)?;
// Update only the rotation of the box.
for deg in 0..=45 {
let rad = truncated_radians((deg * 4) as f32);
rec.log(
"box",
&rerun::Transform3D::new().with_rotation(
rerun::RotationAxisAngle::new(
[0.0, 1.0, 0.0],
rerun::Angle::from_radians(rad),
),
),
)?;
}
// Update only the position of the box.
for t in 0..=50 {
rec.log(
"box",
&rerun::Transform3D::new().with_translation([
0.0,
0.0,
t as f32 / 10.0,
]),
)?;
}
// Update only the rotation of the box.
for deg in 0..=45 {
let rad = truncated_radians(((deg + 45) * 4) as f32);
rec.log(
"box",
&rerun::Transform3D::new().with_rotation(
rerun::RotationAxisAngle::new(
[0.0, 1.0, 0.0],
rerun::Angle::from_radians(rad),
),
),
)?;
}
// Clear all of the box's attributes.
rec.log("box", &rerun::Transform3D::clear_fields())?;
Ok(())
}
fn truncated_radians(deg: f32) -> f32 {
((deg.to_radians() * 1000.0) as i32) as f32 / 1000.0
}
Fields§
§translation: Option<SerializedComponentBatch>Translation vector.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
rotation_axis_angle: Option<SerializedComponentBatch>Rotation via axis + angle.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
quaternion: Option<SerializedComponentBatch>Rotation via quaternion.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
scale: Option<SerializedComponentBatch>Scaling factor.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
mat3x3: Option<SerializedComponentBatch>3x3 transformation matrix.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
relation: Option<SerializedComponentBatch>Specifies the relation this transform establishes between this entity and its parent.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
child_frame: Option<SerializedComponentBatch>The child frame this transform transforms from.
The entity at which the transform relationship of any given child frame is specified mustn’t change over time, but is allowed to be different for static time.
E.g. if you specified the child frame "robot_arm" on an entity named "my_transforms", you may not log transforms
with the child frame "robot_arm" on any other entity than "my_transforms" unless one of them was logged with static time.
If not specified, this is set to the implicit transform frame of the current entity path.
This means that if a archetypes::Transform3D is set on an entity called /my/entity/path then this will default to tf#/my/entity/path.
To set the frame an entity is part of see archetypes::CoordinateFrame.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
parent_frame: Option<SerializedComponentBatch>The parent frame this transform transforms into.
If not specified, this is set to the implicit transform frame of the current entity path’s parent.
This means that if a archetypes::Transform3D is set on an entity called /my/entity/path then this will default to tf#/my/entity.
To set the frame an entity is part of see archetypes::CoordinateFrame.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
Implementations§
Source§impl Transform3D
impl Transform3D
Sourcepub fn descriptor_translation() -> ComponentDescriptor
pub fn descriptor_translation() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::translation.
The corresponding component is crate::components::Translation3D.
Sourcepub fn descriptor_rotation_axis_angle() -> ComponentDescriptor
pub fn descriptor_rotation_axis_angle() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::rotation_axis_angle.
The corresponding component is crate::components::RotationAxisAngle.
Sourcepub fn descriptor_quaternion() -> ComponentDescriptor
pub fn descriptor_quaternion() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::quaternion.
The corresponding component is crate::components::RotationQuat.
Sourcepub fn descriptor_scale() -> ComponentDescriptor
pub fn descriptor_scale() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::scale.
The corresponding component is crate::components::Scale3D.
Sourcepub fn descriptor_mat3x3() -> ComponentDescriptor
pub fn descriptor_mat3x3() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::mat3x3.
The corresponding component is crate::components::TransformMat3x3.
Sourcepub fn descriptor_relation() -> ComponentDescriptor
pub fn descriptor_relation() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::relation.
The corresponding component is crate::components::TransformRelation.
Sourcepub fn descriptor_child_frame() -> ComponentDescriptor
pub fn descriptor_child_frame() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::child_frame.
The corresponding component is crate::components::TransformFrameId.
Sourcepub fn descriptor_parent_frame() -> ComponentDescriptor
pub fn descriptor_parent_frame() -> ComponentDescriptor
Returns the ComponentDescriptor for Self::parent_frame.
The corresponding component is crate::components::TransformFrameId.
Source§impl Transform3D
impl Transform3D
Sourcepub const NUM_COMPONENTS: usize = 8usize
pub const NUM_COMPONENTS: usize = 8usize
The total number of components in the archetype: 0 required, 0 recommended, 8 optional
Source§impl Transform3D
impl Transform3D
Sourcepub fn new() -> Transform3D
pub fn new() -> Transform3D
Create a new Transform3D.
Sourcepub fn update_fields() -> Transform3D
pub fn update_fields() -> Transform3D
Update only some specific fields of a Transform3D.
Sourcepub fn clear_fields() -> Transform3D
pub fn clear_fields() -> Transform3D
Clear all the fields of a Transform3D.
Sourcepub fn columns<I>(
self,
_lengths: I,
) -> Result<impl Iterator<Item = SerializedComponentColumn>, SerializationError>
pub fn columns<I>( self, _lengths: I, ) -> Result<impl Iterator<Item = SerializedComponentColumn>, SerializationError>
Partitions the component data into multiple sub-batches.
Specifically, this transforms the existing SerializedComponentBatches data into SerializedComponentColumns
instead, via SerializedComponentBatch::partitioned.
This makes it possible to use RecordingStream::send_columns to send columnar data directly into Rerun.
The specified lengths must sum to the total length of the component batch.
Sourcepub fn columns_of_unit_batches(
self,
) -> Result<impl Iterator<Item = SerializedComponentColumn>, SerializationError>
pub fn columns_of_unit_batches( self, ) -> Result<impl Iterator<Item = SerializedComponentColumn>, SerializationError>
Helper to partition the component data into unit-length sub-batches.
This is semantically similar to calling Self::columns with std::iter::take(1).repeat(n),
where n is automatically guessed.
Sourcepub fn with_translation(
self,
translation: impl Into<Translation3D>,
) -> Transform3D
pub fn with_translation( self, translation: impl Into<Translation3D>, ) -> Transform3D
Translation vector.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
Sourcepub fn with_many_translation(
self,
translation: impl IntoIterator<Item = impl Into<Translation3D>>,
) -> Transform3D
pub fn with_many_translation( self, translation: impl IntoIterator<Item = impl Into<Translation3D>>, ) -> Transform3D
This method makes it possible to pack multiple crate::components::Translation3D in a single component batch.
This only makes sense when used in conjunction with Self::columns. Self::with_translation should
be used when logging a single row’s worth of data.
Sourcepub fn with_rotation_axis_angle(
self,
rotation_axis_angle: impl Into<RotationAxisAngle>,
) -> Transform3D
pub fn with_rotation_axis_angle( self, rotation_axis_angle: impl Into<RotationAxisAngle>, ) -> Transform3D
Rotation via axis + angle.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
Sourcepub fn with_many_rotation_axis_angle(
self,
rotation_axis_angle: impl IntoIterator<Item = impl Into<RotationAxisAngle>>,
) -> Transform3D
pub fn with_many_rotation_axis_angle( self, rotation_axis_angle: impl IntoIterator<Item = impl Into<RotationAxisAngle>>, ) -> Transform3D
This method makes it possible to pack multiple crate::components::RotationAxisAngle in a single component batch.
This only makes sense when used in conjunction with Self::columns. Self::with_rotation_axis_angle should
be used when logging a single row’s worth of data.
Sourcepub fn with_quaternion(self, quaternion: impl Into<RotationQuat>) -> Transform3D
pub fn with_quaternion(self, quaternion: impl Into<RotationQuat>) -> Transform3D
Rotation via quaternion.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
Sourcepub fn with_many_quaternion(
self,
quaternion: impl IntoIterator<Item = impl Into<RotationQuat>>,
) -> Transform3D
pub fn with_many_quaternion( self, quaternion: impl IntoIterator<Item = impl Into<RotationQuat>>, ) -> Transform3D
This method makes it possible to pack multiple crate::components::RotationQuat in a single component batch.
This only makes sense when used in conjunction with Self::columns. Self::with_quaternion should
be used when logging a single row’s worth of data.
Sourcepub fn with_scale(self, scale: impl Into<Scale3D>) -> Transform3D
pub fn with_scale(self, scale: impl Into<Scale3D>) -> Transform3D
Scaling factor.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
Sourcepub fn with_many_scale(
self,
scale: impl IntoIterator<Item = impl Into<Scale3D>>,
) -> Transform3D
pub fn with_many_scale( self, scale: impl IntoIterator<Item = impl Into<Scale3D>>, ) -> Transform3D
This method makes it possible to pack multiple crate::components::Scale3D in a single component batch.
This only makes sense when used in conjunction with Self::columns. Self::with_scale should
be used when logging a single row’s worth of data.
Sourcepub fn with_mat3x3(self, mat3x3: impl Into<TransformMat3x3>) -> Transform3D
pub fn with_mat3x3(self, mat3x3: impl Into<TransformMat3x3>) -> Transform3D
3x3 transformation matrix.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
Sourcepub fn with_many_mat3x3(
self,
mat3x3: impl IntoIterator<Item = impl Into<TransformMat3x3>>,
) -> Transform3D
pub fn with_many_mat3x3( self, mat3x3: impl IntoIterator<Item = impl Into<TransformMat3x3>>, ) -> Transform3D
This method makes it possible to pack multiple crate::components::TransformMat3x3 in a single component batch.
This only makes sense when used in conjunction with Self::columns. Self::with_mat3x3 should
be used when logging a single row’s worth of data.
Sourcepub fn with_relation(
self,
relation: impl Into<TransformRelation>,
) -> Transform3D
pub fn with_relation( self, relation: impl Into<TransformRelation>, ) -> Transform3D
Specifies the relation this transform establishes between this entity and its parent.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
Sourcepub fn with_many_relation(
self,
relation: impl IntoIterator<Item = impl Into<TransformRelation>>,
) -> Transform3D
pub fn with_many_relation( self, relation: impl IntoIterator<Item = impl Into<TransformRelation>>, ) -> Transform3D
This method makes it possible to pack multiple crate::components::TransformRelation in a single component batch.
This only makes sense when used in conjunction with Self::columns. Self::with_relation should
be used when logging a single row’s worth of data.
Sourcepub fn with_child_frame(
self,
child_frame: impl Into<TransformFrameId>,
) -> Transform3D
pub fn with_child_frame( self, child_frame: impl Into<TransformFrameId>, ) -> Transform3D
The child frame this transform transforms from.
The entity at which the transform relationship of any given child frame is specified mustn’t change over time, but is allowed to be different for static time.
E.g. if you specified the child frame "robot_arm" on an entity named "my_transforms", you may not log transforms
with the child frame "robot_arm" on any other entity than "my_transforms" unless one of them was logged with static time.
If not specified, this is set to the implicit transform frame of the current entity path.
This means that if a archetypes::Transform3D is set on an entity called /my/entity/path then this will default to tf#/my/entity/path.
To set the frame an entity is part of see archetypes::CoordinateFrame.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
Sourcepub fn with_many_child_frame(
self,
child_frame: impl IntoIterator<Item = impl Into<TransformFrameId>>,
) -> Transform3D
pub fn with_many_child_frame( self, child_frame: impl IntoIterator<Item = impl Into<TransformFrameId>>, ) -> Transform3D
This method makes it possible to pack multiple crate::components::TransformFrameId in a single component batch.
This only makes sense when used in conjunction with Self::columns. Self::with_child_frame should
be used when logging a single row’s worth of data.
Sourcepub fn with_parent_frame(
self,
parent_frame: impl Into<TransformFrameId>,
) -> Transform3D
pub fn with_parent_frame( self, parent_frame: impl Into<TransformFrameId>, ) -> Transform3D
The parent frame this transform transforms into.
If not specified, this is set to the implicit transform frame of the current entity path’s parent.
This means that if a archetypes::Transform3D is set on an entity called /my/entity/path then this will default to tf#/my/entity.
To set the frame an entity is part of see archetypes::CoordinateFrame.
Any update to this field will reset all other transform properties that aren’t changed in the same log call or send_columns row.
Sourcepub fn with_many_parent_frame(
self,
parent_frame: impl IntoIterator<Item = impl Into<TransformFrameId>>,
) -> Transform3D
pub fn with_many_parent_frame( self, parent_frame: impl IntoIterator<Item = impl Into<TransformFrameId>>, ) -> Transform3D
This method makes it possible to pack multiple crate::components::TransformFrameId in a single component batch.
This only makes sense when used in conjunction with Self::columns. Self::with_parent_frame should
be used when logging a single row’s worth of data.
Source§impl Transform3D
impl Transform3D
Sourcepub const IDENTITY: Transform3D
pub const IDENTITY: Transform3D
The identity transform.
This is the same as Self::clear_fields, i.e. it logs an empty (default)
value for all components.
Sourcepub fn with_rotation(self, rotation: impl Into<Rotation3D>) -> Transform3D
pub fn with_rotation(self, rotation: impl Into<Rotation3D>) -> Transform3D
Convenience method that takes any kind of (single) rotation representation and sets it on this transform.
Sourcepub fn from_translation(translation: impl Into<Translation3D>) -> Transform3D
pub fn from_translation(translation: impl Into<Translation3D>) -> Transform3D
From a translation, clearing all other fields.
Sourcepub fn from_mat3x3(mat3x3: impl Into<TransformMat3x3>) -> Transform3D
pub fn from_mat3x3(mat3x3: impl Into<TransformMat3x3>) -> Transform3D
From a 3x3 matrix, clearing all other fields.
Sourcepub fn from_rotation(rotation: impl Into<Rotation3D>) -> Transform3D
pub fn from_rotation(rotation: impl Into<Rotation3D>) -> Transform3D
From a rotation, clearing all other fields.
Sourcepub fn from_scale(scale: impl Into<Scale3D>) -> Transform3D
pub fn from_scale(scale: impl Into<Scale3D>) -> Transform3D
From a scale, clearing all other fields.
Sourcepub fn from_translation_rotation(
translation: impl Into<Translation3D>,
rotation: impl Into<Rotation3D>,
) -> Transform3D
pub fn from_translation_rotation( translation: impl Into<Translation3D>, rotation: impl Into<Rotation3D>, ) -> Transform3D
From a translation applied after a rotation, known as a rigid transformation.
Clears all other fields.
Sourcepub fn from_translation_mat3x3(
translation: impl Into<Translation3D>,
mat3x3: impl Into<TransformMat3x3>,
) -> Transform3D
pub fn from_translation_mat3x3( translation: impl Into<Translation3D>, mat3x3: impl Into<TransformMat3x3>, ) -> Transform3D
From a translation applied after a 3x3 matrix, clearing all other fields.
Sourcepub fn from_translation_scale(
translation: impl Into<Translation3D>,
scale: impl Into<Scale3D>,
) -> Transform3D
pub fn from_translation_scale( translation: impl Into<Translation3D>, scale: impl Into<Scale3D>, ) -> Transform3D
From a translation applied after a scale, clearing all other fields.
Sourcepub fn from_translation_rotation_scale(
translation: impl Into<Translation3D>,
rotation: impl Into<Rotation3D>,
scale: impl Into<Scale3D>,
) -> Transform3D
pub fn from_translation_rotation_scale( translation: impl Into<Translation3D>, rotation: impl Into<Rotation3D>, scale: impl Into<Scale3D>, ) -> Transform3D
From a translation, applied after a rotation & scale, known as an affine transformation, clearing all other fields.
Sourcepub fn from_rotation_scale(
rotation: impl Into<Rotation3D>,
scale: impl Into<Scale3D>,
) -> Transform3D
pub fn from_rotation_scale( rotation: impl Into<Rotation3D>, scale: impl Into<Scale3D>, ) -> Transform3D
From a rotation & scale, clearing all other fields.
Trait Implementations§
Source§impl Archetype for Transform3D
impl Archetype for Transform3D
Source§fn name() -> ArchetypeName
fn name() -> ArchetypeName
rerun.archetypes.Points2D.Source§fn display_name() -> &'static str
fn display_name() -> &'static str
Source§fn required_components() -> Cow<'static, [ComponentDescriptor]>
fn required_components() -> Cow<'static, [ComponentDescriptor]>
Source§fn recommended_components() -> Cow<'static, [ComponentDescriptor]>
fn recommended_components() -> Cow<'static, [ComponentDescriptor]>
Source§fn optional_components() -> Cow<'static, [ComponentDescriptor]>
fn optional_components() -> Cow<'static, [ComponentDescriptor]>
Source§fn all_components() -> Cow<'static, [ComponentDescriptor]>
fn all_components() -> Cow<'static, [ComponentDescriptor]>
Source§fn from_arrow_components(
arrow_data: impl IntoIterator<Item = (ComponentDescriptor, Arc<dyn Array>)>,
) -> Result<Transform3D, DeserializationError>
fn from_arrow_components( arrow_data: impl IntoIterator<Item = (ComponentDescriptor, Arc<dyn Array>)>, ) -> Result<Transform3D, DeserializationError>
ComponentDescriptors, deserializes them
into this archetype. Read moreSource§fn all_component_identifiers() -> impl Iterator<Item = ComponentIdentifier>
fn all_component_identifiers() -> impl Iterator<Item = ComponentIdentifier>
Self::all_components to return all component identifiers.Source§fn from_arrow(
data: impl IntoIterator<Item = (Field, Arc<dyn Array>)>,
) -> Result<Self, DeserializationError>where
Self: Sized,
fn from_arrow(
data: impl IntoIterator<Item = (Field, Arc<dyn Array>)>,
) -> Result<Self, DeserializationError>where
Self: Sized,
impl ArchetypeReflectionMarker for Transform3D
Source§impl AsComponents for Transform3D
impl AsComponents for Transform3D
Source§fn as_serialized_batches(&self) -> Vec<SerializedComponentBatch>
fn as_serialized_batches(&self) -> Vec<SerializedComponentBatch>
SerializedComponentBatches. Read moreSource§impl Clone for Transform3D
impl Clone for Transform3D
Source§fn clone(&self) -> Transform3D
fn clone(&self) -> Transform3D
1.0.0 (const: unstable) · Source§fn clone_from(&mut self, source: &Self)
fn clone_from(&mut self, source: &Self)
source. Read moreSource§impl Debug for Transform3D
impl Debug for Transform3D
Source§impl Default for Transform3D
impl Default for Transform3D
Source§fn default() -> Transform3D
fn default() -> Transform3D
Source§impl PartialEq for Transform3D
impl PartialEq for Transform3D
Source§fn eq(&self, other: &Transform3D) -> bool
fn eq(&self, other: &Transform3D) -> bool
self and other values to be equal, and is used by ==.Source§impl SizeBytes for Transform3D
impl SizeBytes for Transform3D
Source§fn heap_size_bytes(&self) -> u64
fn heap_size_bytes(&self) -> u64
self uses on the heap. Read moreSource§fn total_size_bytes(&self) -> u64
fn total_size_bytes(&self) -> u64
self in bytes, accounting for both stack and heap space.Source§fn stack_size_bytes(&self) -> u64
fn stack_size_bytes(&self) -> u64
self on the stack, in bytes. Read moreimpl StructuralPartialEq for Transform3D
Auto Trait Implementations§
impl !RefUnwindSafe for Transform3D
impl !UnwindSafe for Transform3D
impl Freeze for Transform3D
impl Send for Transform3D
impl Sync for Transform3D
impl Unpin for Transform3D
impl UnsafeUnpin for Transform3D
Blanket Implementations§
Source§impl<T> BorrowMut<T> for Twhere
T: ?Sized,
impl<T> BorrowMut<T> for Twhere
T: ?Sized,
Source§fn borrow_mut(&mut self) -> &mut T
fn borrow_mut(&mut self) -> &mut T
Source§impl<T> CheckedAs for T
impl<T> CheckedAs for T
Source§fn checked_as<Dst>(self) -> Option<Dst>where
T: CheckedCast<Dst>,
fn checked_as<Dst>(self) -> Option<Dst>where
T: CheckedCast<Dst>,
Source§impl<Src, Dst> CheckedCastFrom<Src> for Dstwhere
Src: CheckedCast<Dst>,
impl<Src, Dst> CheckedCastFrom<Src> for Dstwhere
Src: CheckedCast<Dst>,
Source§fn checked_cast_from(src: Src) -> Option<Dst>
fn checked_cast_from(src: Src) -> Option<Dst>
Source§impl<T> CloneToUninit for Twhere
T: Clone,
impl<T> CloneToUninit for Twhere
T: Clone,
Source§impl<T> Downcast for Twhere
T: Any,
impl<T> Downcast for Twhere
T: Any,
Source§fn into_any(self: Box<T>) -> Box<dyn Any>
fn into_any(self: Box<T>) -> Box<dyn Any>
Box<dyn Trait> (where Trait: Downcast) to Box<dyn Any>. Box<dyn Any> can
then be further downcast into Box<ConcreteType> where ConcreteType implements Trait.Source§fn into_any_rc(self: Rc<T>) -> Rc<dyn Any>
fn into_any_rc(self: Rc<T>) -> Rc<dyn Any>
Rc<Trait> (where Trait: Downcast) to Rc<Any>. Rc<Any> can then be
further downcast into Rc<ConcreteType> where ConcreteType implements Trait.Source§fn as_any(&self) -> &(dyn Any + 'static)
fn as_any(&self) -> &(dyn Any + 'static)
&Trait (where Trait: Downcast) to &Any. This is needed since Rust cannot
generate &Any’s vtable from &Trait’s.Source§fn as_any_mut(&mut self) -> &mut (dyn Any + 'static)
fn as_any_mut(&mut self) -> &mut (dyn Any + 'static)
&mut Trait (where Trait: Downcast) to &Any. This is needed since Rust cannot
generate &mut Any’s vtable from &mut Trait’s.Source§impl<T> DowncastSync for T
impl<T> DowncastSync for T
impl<T> ErasedDestructor for Twhere
T: 'static,
Source§impl<T> FutureExt for T
impl<T> FutureExt for T
Source§fn with_context(self, otel_cx: Context) -> WithContext<Self> ⓘ
fn with_context(self, otel_cx: Context) -> WithContext<Self> ⓘ
Source§fn with_current_context(self) -> WithContext<Self> ⓘ
fn with_current_context(self) -> WithContext<Self> ⓘ
Source§impl<T> Instrument for T
impl<T> Instrument for T
Source§fn instrument(self, span: Span) -> Instrumented<Self> ⓘ
fn instrument(self, span: Span) -> Instrumented<Self> ⓘ
Source§fn in_current_span(self) -> Instrumented<Self> ⓘ
fn in_current_span(self) -> Instrumented<Self> ⓘ
Source§impl<T> IntoEither for T
impl<T> IntoEither for T
Source§fn into_either(self, into_left: bool) -> Either<Self, Self> ⓘ
fn into_either(self, into_left: bool) -> Either<Self, Self> ⓘ
self into a Left variant of Either<Self, Self>
if into_left is true.
Converts self into a Right variant of Either<Self, Self>
otherwise. Read moreSource§fn into_either_with<F>(self, into_left: F) -> Either<Self, Self> ⓘ
fn into_either_with<F>(self, into_left: F) -> Either<Self, Self> ⓘ
self into a Left variant of Either<Self, Self>
if into_left(&self) returns true.
Converts self into a Right variant of Either<Self, Self>
otherwise. Read moreSource§impl<T> IntoRequest<T> for T
impl<T> IntoRequest<T> for T
Source§fn into_request(self) -> Request<T>
fn into_request(self) -> Request<T>
T in a tonic::RequestSource§impl<Src, Dst> LosslessTryInto<Dst> for Srcwhere
Dst: LosslessTryFrom<Src>,
impl<Src, Dst> LosslessTryInto<Dst> for Srcwhere
Dst: LosslessTryFrom<Src>,
Source§fn lossless_try_into(self) -> Option<Dst>
fn lossless_try_into(self) -> Option<Dst>
Source§impl<Src, Dst> LossyInto<Dst> for Srcwhere
Dst: LossyFrom<Src>,
impl<Src, Dst> LossyInto<Dst> for Srcwhere
Dst: LossyFrom<Src>,
Source§fn lossy_into(self) -> Dst
fn lossy_into(self) -> Dst
Source§impl<T> OverflowingAs for T
impl<T> OverflowingAs for T
Source§fn overflowing_as<Dst>(self) -> (Dst, bool)where
T: OverflowingCast<Dst>,
fn overflowing_as<Dst>(self) -> (Dst, bool)where
T: OverflowingCast<Dst>,
Source§impl<Src, Dst> OverflowingCastFrom<Src> for Dstwhere
Src: OverflowingCast<Dst>,
impl<Src, Dst> OverflowingCastFrom<Src> for Dstwhere
Src: OverflowingCast<Dst>,
Source§fn overflowing_cast_from(src: Src) -> (Dst, bool)
fn overflowing_cast_from(src: Src) -> (Dst, bool)
Source§impl<T> Pipe for Twhere
T: ?Sized,
impl<T> Pipe for Twhere
T: ?Sized,
Source§fn pipe<R>(self, func: impl FnOnce(Self) -> R) -> Rwhere
Self: Sized,
fn pipe<R>(self, func: impl FnOnce(Self) -> R) -> Rwhere
Self: Sized,
Source§fn pipe_ref<'a, R>(&'a self, func: impl FnOnce(&'a Self) -> R) -> Rwhere
R: 'a,
fn pipe_ref<'a, R>(&'a self, func: impl FnOnce(&'a Self) -> R) -> Rwhere
R: 'a,
self and passes that borrow into the pipe function. Read moreSource§fn pipe_ref_mut<'a, R>(&'a mut self, func: impl FnOnce(&'a mut Self) -> R) -> Rwhere
R: 'a,
fn pipe_ref_mut<'a, R>(&'a mut self, func: impl FnOnce(&'a mut Self) -> R) -> Rwhere
R: 'a,
self and passes that borrow into the pipe function. Read moreSource§fn pipe_borrow<'a, B, R>(&'a self, func: impl FnOnce(&'a B) -> R) -> R
fn pipe_borrow<'a, B, R>(&'a self, func: impl FnOnce(&'a B) -> R) -> R
Source§fn pipe_borrow_mut<'a, B, R>(
&'a mut self,
func: impl FnOnce(&'a mut B) -> R,
) -> R
fn pipe_borrow_mut<'a, B, R>( &'a mut self, func: impl FnOnce(&'a mut B) -> R, ) -> R
Source§fn pipe_as_ref<'a, U, R>(&'a self, func: impl FnOnce(&'a U) -> R) -> R
fn pipe_as_ref<'a, U, R>(&'a self, func: impl FnOnce(&'a U) -> R) -> R
self, then passes self.as_ref() into the pipe function.Source§fn pipe_as_mut<'a, U, R>(&'a mut self, func: impl FnOnce(&'a mut U) -> R) -> R
fn pipe_as_mut<'a, U, R>(&'a mut self, func: impl FnOnce(&'a mut U) -> R) -> R
self, then passes self.as_mut() into the pipe
function.Source§fn pipe_deref<'a, T, R>(&'a self, func: impl FnOnce(&'a T) -> R) -> R
fn pipe_deref<'a, T, R>(&'a self, func: impl FnOnce(&'a T) -> R) -> R
self, then passes self.deref() into the pipe function.Source§impl<T> Pointable for T
impl<T> Pointable for T
Source§impl<T> PolicyExt for Twhere
T: ?Sized,
impl<T> PolicyExt for Twhere
T: ?Sized,
Source§impl<T> SaturatingAs for T
impl<T> SaturatingAs for T
Source§fn saturating_as<Dst>(self) -> Dstwhere
T: SaturatingCast<Dst>,
fn saturating_as<Dst>(self) -> Dstwhere
T: SaturatingCast<Dst>,
Source§impl<Src, Dst> SaturatingCastFrom<Src> for Dstwhere
Src: SaturatingCast<Dst>,
impl<Src, Dst> SaturatingCastFrom<Src> for Dstwhere
Src: SaturatingCast<Dst>,
Source§fn saturating_cast_from(src: Src) -> Dst
fn saturating_cast_from(src: Src) -> Dst
Source§impl<T> StrictAs for T
impl<T> StrictAs for T
Source§fn strict_as<Dst>(self) -> Dstwhere
T: StrictCast<Dst>,
fn strict_as<Dst>(self) -> Dstwhere
T: StrictCast<Dst>,
Source§impl<Src, Dst> StrictCastFrom<Src> for Dstwhere
Src: StrictCast<Dst>,
impl<Src, Dst> StrictCastFrom<Src> for Dstwhere
Src: StrictCast<Dst>,
Source§fn strict_cast_from(src: Src) -> Dst
fn strict_cast_from(src: Src) -> Dst
Source§impl<T> Tap for T
impl<T> Tap for T
Source§fn tap_borrow<B>(self, func: impl FnOnce(&B)) -> Self
fn tap_borrow<B>(self, func: impl FnOnce(&B)) -> Self
Borrow<B> of a value. Read moreSource§fn tap_borrow_mut<B>(self, func: impl FnOnce(&mut B)) -> Self
fn tap_borrow_mut<B>(self, func: impl FnOnce(&mut B)) -> Self
BorrowMut<B> of a value. Read moreSource§fn tap_ref<R>(self, func: impl FnOnce(&R)) -> Self
fn tap_ref<R>(self, func: impl FnOnce(&R)) -> Self
AsRef<R> view of a value. Read moreSource§fn tap_ref_mut<R>(self, func: impl FnOnce(&mut R)) -> Self
fn tap_ref_mut<R>(self, func: impl FnOnce(&mut R)) -> Self
AsMut<R> view of a value. Read moreSource§fn tap_deref<T>(self, func: impl FnOnce(&T)) -> Self
fn tap_deref<T>(self, func: impl FnOnce(&T)) -> Self
Deref::Target of a value. Read moreSource§fn tap_deref_mut<T>(self, func: impl FnOnce(&mut T)) -> Self
fn tap_deref_mut<T>(self, func: impl FnOnce(&mut T)) -> Self
Deref::Target of a value. Read moreSource§fn tap_dbg(self, func: impl FnOnce(&Self)) -> Self
fn tap_dbg(self, func: impl FnOnce(&Self)) -> Self
.tap() only in debug builds, and is erased in release builds.Source§fn tap_mut_dbg(self, func: impl FnOnce(&mut Self)) -> Self
fn tap_mut_dbg(self, func: impl FnOnce(&mut Self)) -> Self
.tap_mut() only in debug builds, and is erased in release
builds.Source§fn tap_borrow_dbg<B>(self, func: impl FnOnce(&B)) -> Self
fn tap_borrow_dbg<B>(self, func: impl FnOnce(&B)) -> Self
.tap_borrow() only in debug builds, and is erased in release
builds.Source§fn tap_borrow_mut_dbg<B>(self, func: impl FnOnce(&mut B)) -> Self
fn tap_borrow_mut_dbg<B>(self, func: impl FnOnce(&mut B)) -> Self
.tap_borrow_mut() only in debug builds, and is erased in release
builds.Source§fn tap_ref_dbg<R>(self, func: impl FnOnce(&R)) -> Self
fn tap_ref_dbg<R>(self, func: impl FnOnce(&R)) -> Self
.tap_ref() only in debug builds, and is erased in release
builds.Source§fn tap_ref_mut_dbg<R>(self, func: impl FnOnce(&mut R)) -> Self
fn tap_ref_mut_dbg<R>(self, func: impl FnOnce(&mut R)) -> Self
.tap_ref_mut() only in debug builds, and is erased in release
builds.Source§fn tap_deref_dbg<T>(self, func: impl FnOnce(&T)) -> Self
fn tap_deref_dbg<T>(self, func: impl FnOnce(&T)) -> Self
.tap_deref() only in debug builds, and is erased in release
builds.