
Viewercloud
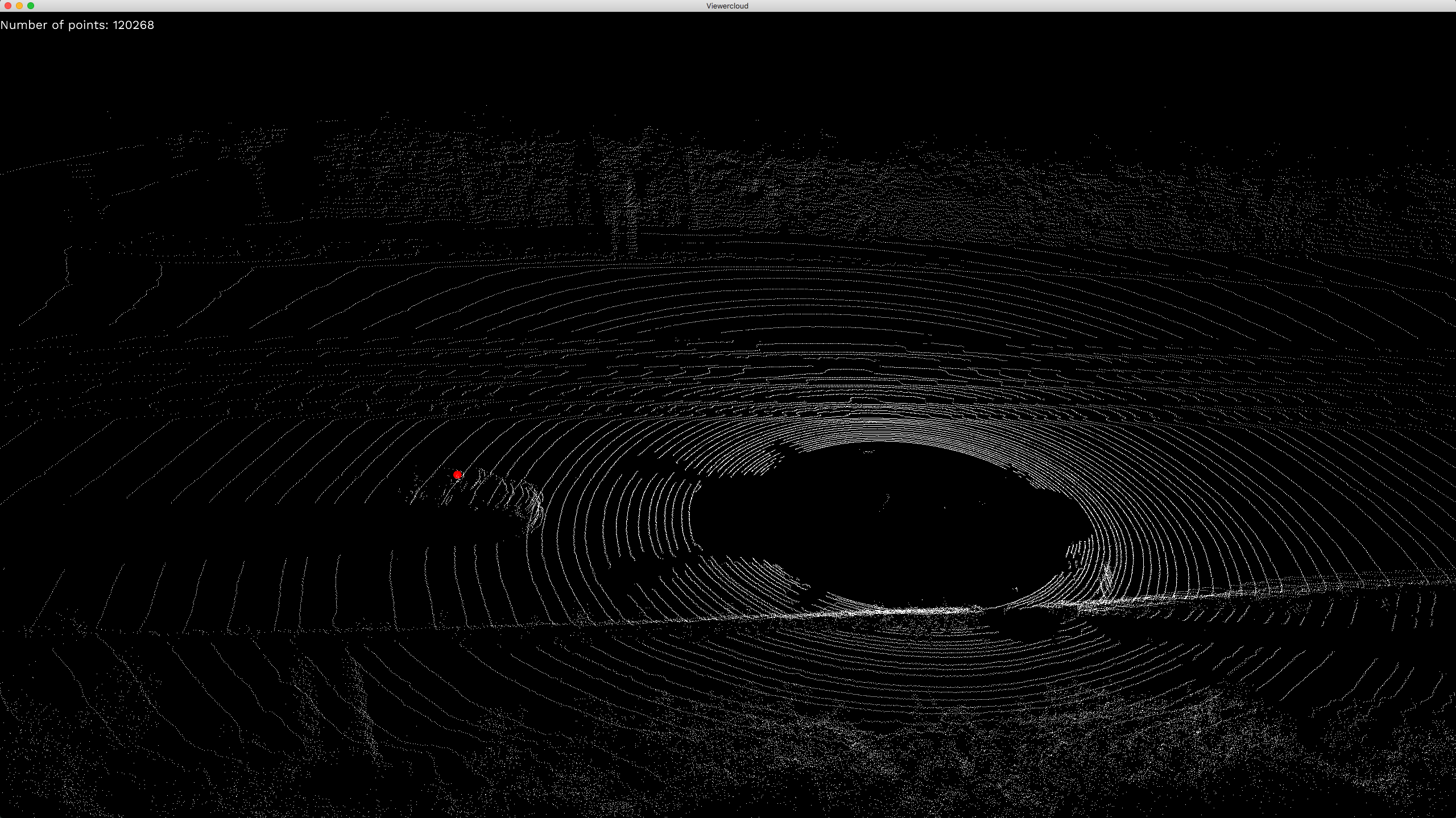
Viewercloud is a library and also a cli to read and display Pointcloud.
It was initially used to display KITTI pointcloud.
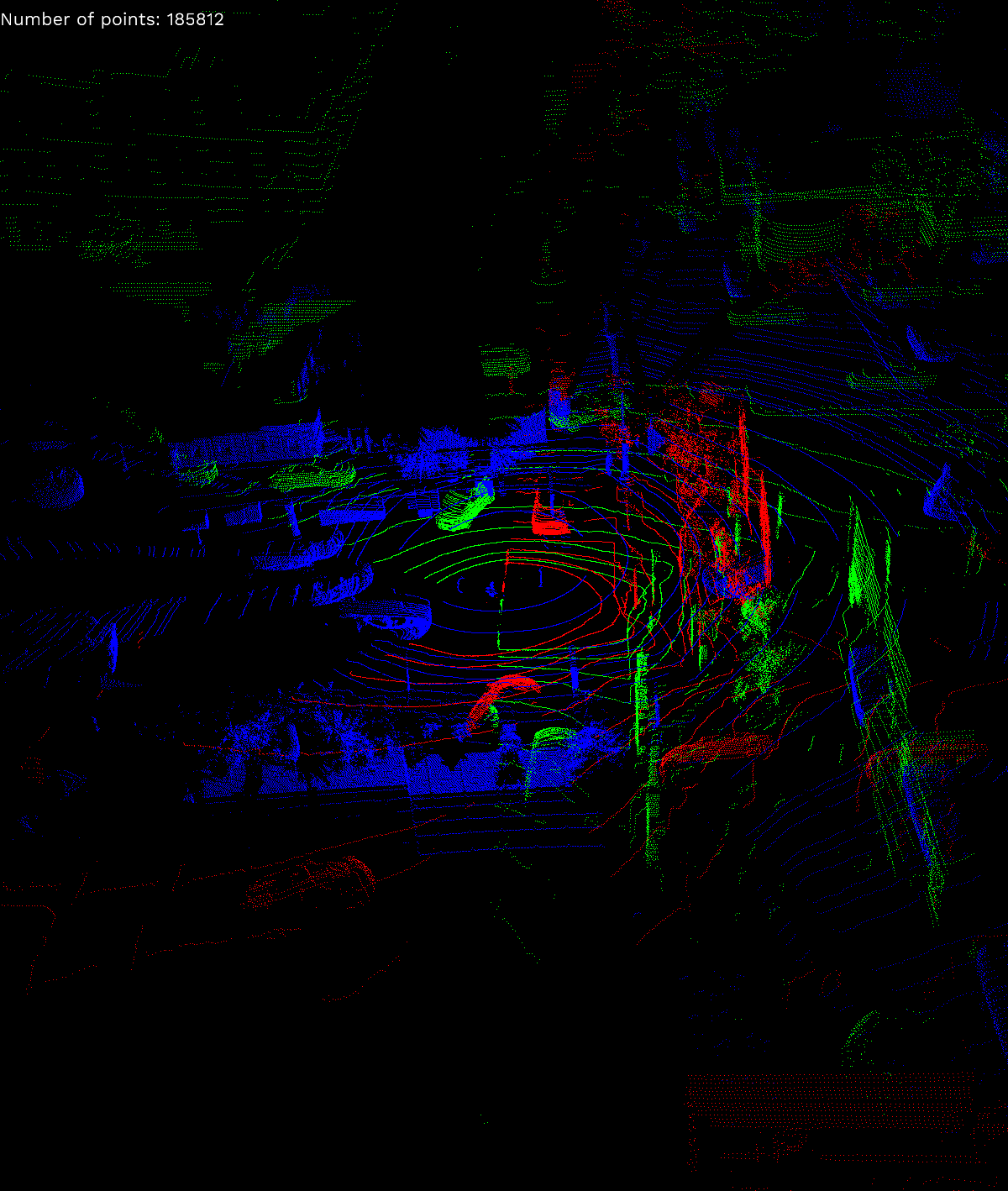
However it was also tested on the Lyft Level 5 Dataset pointcloud.
It will also be able to display the 3D annotations and the 3D BoundingBox computed by your favorite algorithm.
Viewercloud will open a openGL window to display the pointcloud. Press qto close.
It can also take a screen shot of the current view to save as png. Press s take screenshot.
Python Usage
You can install pyviewercloud the python bindings to viewercloud thanks to Pyo3 and Pyo3-numpy
# Create a new viewer with a window size 1200x1800.
=
# Load some pointcloud from the lyft perception dataset
# Currently only support pointcloud as numpy.ndarray Nx3 in np.float32
=
=
=
# Add them one by one to the viewer to have different color
# You can now display the window
# Create a new viewer with a window size 1200x1800.
=
# Load some pointcloud from the kitti dataset
=
# Add some centroids to have the same color.
# Currently only support centroids as numpy.ndarray Nx3 in np.float32
=
CLI Usage
> viewercloud
<pointcloud-file> Path
<annotations-file> Path
<inferences-file> Path
Build
It will be possible to download from github release and brew.