Expand description
RoboPLC



RoboPLC is an ultimate pack of a framework and tools for creating real-time micro-services, PLCs and industrial-grade robots in Rust.
The crate is designed to let using all its components both separately and together.
RoboPLC is a part of EVA ICS industrial automation platform.
Real-time-safe data synchronization components are re-exported from the RTSC crate which is a part of RoboPLC project and can be used directly, with no requirement to use RoboPLC.
RoboPLC eco-system provides:
-
roboplc-cli (robo) - a CLI tool to create and manage RoboPLC projects
-
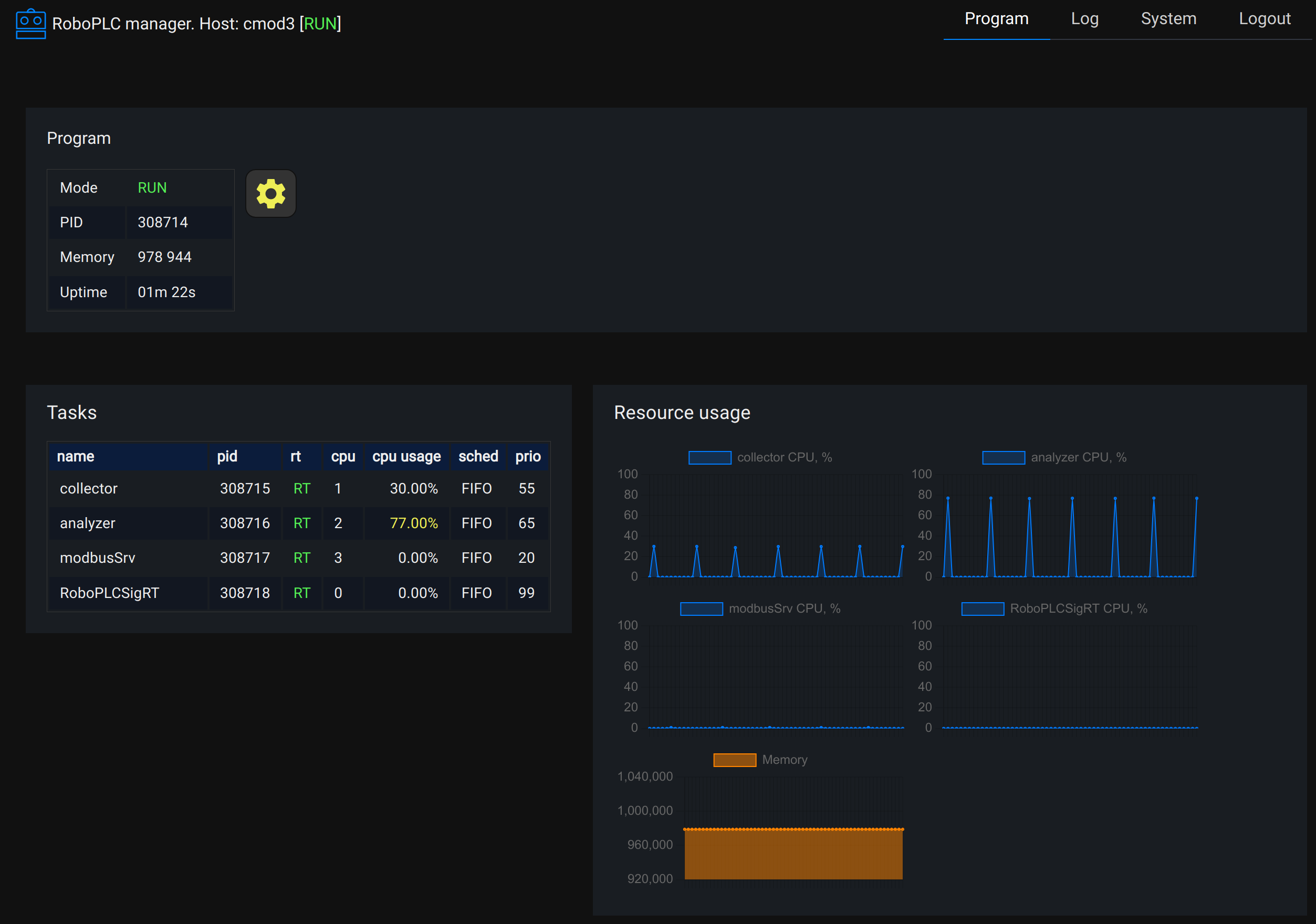
RoboPLC manager - a web interface and HTTP API to monitor and manage RoboPLC-based systems
§Technical documentation
Available at https://info.bma.ai/en/actual/roboplc/index.html
§Examples
Can be found at https://github.com/roboplc/roboplc/tree/main/examples
§DataBuffer
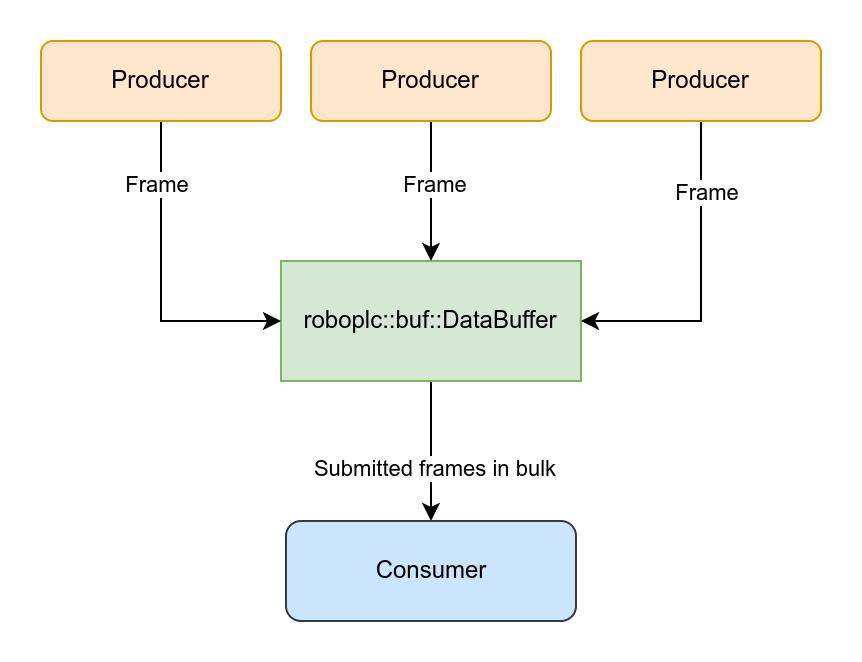
buf::DataBuffer covers a typical data exchange pattern when data
frames are collected (cached) from a single or multiple producers, then taken
by a single consumer in bulk and submitted, e.g. into a local database or into
an external bus.
-
always has got a fixed capacity
-
thread-safe out-of-the-box
-
frames may be forcibly pushed, overriding the previous ones, like in a ring-buffer.
§Hub
hub::Hub implements a data-hub (in-process pub/sub) model, when multiple
clients (usually thread workers) exchange data via a single virtual bus instead
of using direct channels.
This brings some additional overhead into data exchange, however makes the architecture significantly clearer, lowers code support costs and brings additional features.

-
classic pub/sub patterns with no data serialization overhead
-
based on
policy_channelwhich allows to mix different kinds of data and apply additional policies if required -
a fully passive model with no “server” thread.
§pdeque and policy_channel
A policy-based deque rtsc::pdeque::Deque is a component to build policy-based
channels.
policy_channel is a channel module, based on the policy-based deque.
Data policies supported:
- Always a frame is always delivered
- Latest a frame is always delivered, previous are dropped if no room (acts like a ring-buffer)
- Optional a frame can be skipped if no room
- Single a frame must be delivered only once (the latest one)
- SingleOptional a frame must be delivered only once (the latest one) and is optional
Additionally, components support ordering by data priority and automatically drop expired data if the data type has got an expiration marker method implemented.
policy_channel is a real-time safe channel, mean it may be not so fast as
popular channel implementations (it may be even slower than channels provided
by std::sync::mpsc). But it is completely safe for real-time
applications, mean there are no spin loops, data is always delivered with
minimal latency and threads do not block each other.
§Real-time
thread_rt::Builder provides a thread builder component, which extends the
standard thread builder with real-time capabilities: scheduler policies and CPU
affinity (Linux only).
supervisor::Supervisor provides a lightweight task supervisor to manage
launched threads.
§Controller
controller::Controller is the primary component of mixing up all the
functionality together.

§I/O
io module provides a set of tools to work with field devices and SCADA
buses.
Currently supported:
-
Modbus (RTU/TCP) via
io::modbus(Modbus client/master example, Modbus server/slave example), requiresmodbuscrate feature. -
Raw UDP in/out via
io::raw_udp(Raw UDP in/out example) -
Subprocess pipes via
io::pipe(Subprocess pipe example) -
EVA ICS EAPI in/out via
io::eapi(EVA ICS example), requireseapicrate feature -
SNMP v1/2/3 via
snmp2external crate. -
ADS connector for Beckhoff TwinCAT, requires a license for commercial use
-
IEC 60870-5 client, requires a license for commercial use
§Related crates
RoboPLC project provides additional crates, which can be used both with RoboPLC and separately:
-
RTSC - Real-Time Synchronization Components, a set of real-time safe data synchronization components, the core components of RoboPLC
-
atomic-timer - an atomic timer component for typical automation tasks
-
rpdo - RoboPLC Data Objects protocol for data synchronization between processes and devices
-
ehmi - HMI components for
eguiinterfaces. -
logicline - Logic processing engine
-
metrics-exporter-scope - an oscilloscope-like exporter for metrics eco-system
-
heartbeat-watchdog - heartbeat and watchdog components for mission-critical systems monitoring
-
rvideo - video stream debugging
-
rflow - allows quickly create chat-like diagnostic interfaces for headless programs
§Locking safety
Note: the asynchronous components use parking_lot_rt locking only.
By default, the crate uses parking_lot for locking. For real-time applications, the following features are available:
-
locking-rt- use parking_lot_rt crate which is a spin-free fork of parking_lot. -
locking-rt-safe- use RTSC priority-inheritance locking, which is not affected by priority inversion (Linux only, recommended Kernel 5.14+).
Note: to switch locking policy, disable the crate default features.
The locking policy can be also selected in CLI when creating a new project:
robo new --locking rt-safe # the default for CLI-created projects is rt-safe§Using on other platforms
The components thread_rt, supervisor and controller can work on
Linux machines only.
Despite of that, “cargo check” should work on Windows and OSX to let developers code RoboPLC-based programs on these platforms. In case if this fails with any crate feature, please report an issue.
§Migration from 0.5.x
-
In case if
io::eapiis used, action handlers must now return a serializable value. -
For proper
hmisupport, ensure thatRuntimeDirectoryis configured inroboplc.programservice (/lib/systemd/system/roboplc.program.service):
[Service]
# ...
RuntimeDirectory=roboplc
RuntimeDirectoryMode=700§Migration from 0.4.x
-
Certain
thread-rtmodule components have been moved tortsccrate. RoboPLC re-exports them, adding compatibility with simulated mode. -
thread_rt::set_simulatedhas been moved toset_simulated. -
thread_rtcomponentsCpuGovernorandSystemConfighave been moved tosystemcrate module. -
openssl-vendoredfeature has been removed, as EVA ICS EAPI has got nowopensslas an optional dependency for certain specific features only.
§Migration from 0.3.x
-
pchannelandpchannel_asynchave been renamed topolicy_channelandpolicy_channel_asyncrespectively. -
By default, the crate uses parking_lot for locking. To switch to more safe real-time locking, disable the crate default features and enable either
locking-rtorlocking-rt-safe. This is important for real-time applications and must be enabled manually. -
As RTSC components are lock-agnostic, which requires to specify generic locking types, the modules
channel,policy_channel,bufandsemaphoreare now wrappers around RTSC modules with the chosen locking policy. -
hub_asyncnow requiresasyncfeature to be enabled.
§MSRV
Minimum supported mainstream Rust version of RoboPLC is synchronized with the Ferrocene Rust compiler. This allows to create mission-critical software, compliant with ISO 26262 (TCL 3/ASIL D), IEC 61508 (T3) and IEC 62304.
Current MSRV: mainstream 1.90.0, Ferrocene 25.11.0. Certain features may work with older Rust versions.
Re-exports§
pub use logicline;pub use parking_lot as locking;pub use metrics;pub use rvideo;pub use rflow;
Modules§
- buf
- Wrapper around
rtsc::bufwith the chosen locking policy - channel
- Wrapper around
rtsc::channelwith the chosen locking policy - comm
- Reliable TCP/Serial communications
- controller
- Controller and workers
- hmi
- HMI (Human-Machine Interface) API
- hub
- In-process data communication pub/sub hub, synchronous edition
- hub_
async - In-process data communication pub/sub hub, asynchronous edition
- io
- I/O
- policy_
channel - Wrapper around
rtsc::policy_channelwith the chosen locking policy - policy_
channel_ async - Policy-based async channel
- prelude
- Prelude module
- semaphore
- Wrapper around
rtsc::semaphorewith the chosen locking policy - state
- State helper functions
- supervisor
- Task supervisor to manage real-time threads
- system
- Linux system tools
- thread_
rt - Real-time thread functions to work with
supervisor::Supervisorand standalone, Linux only - time
- Time tools
Macros§
- event_
matches - A macro which can be used to match an event with enum for
Hubsubscription condition - init_
eapi - Initializes the EAPI module
Structs§
- Atomic
Timer - Atomic timer
Enums§
- Delivery
Policy - Data delivery policies, used by
crate::pdeque::Deque - Error
- The crate error type
- Level
Filter - An enum representing the available verbosity level filters of the logger.
Traits§
- Data
Channel - An abstract trait for data channels and hubs
- Data
Delivery Policy - Implements delivery policies for own data types
Functions§
- allow_
panic_ suicide - Allow any thread to kill the process on panic (on by default)
- configure_
logger - Configures stdout logger with the given filter. If started in production mode, does not logs timestamps
- critical
- Immediately kills the current process and all its subprocesses with a message to stderr
- is_
production - Returns true if started in production mode (as a systemd unit)
- metrics_
exporter - Returns Prometheus metrics exporter builder
- metrics_
exporter_ install - Installs Prometheus metrics exporter together with Scope exporter
- prevent_
panic_ suicide - Prevent other threads to kill the process on panic (the setter still has the ability)
- reload_
executable - Reload the current executable (performs execvp syscall, Linux only)
- serve_
rflow - Serves the default
rflowserver at TCP port0.0.0.0:4001 - serve_
rvideo - Serves the default
rvideoserver at TCP port0.0.0.0:3001 - set_
panic_ delay - Sets the delay before killing the process on panic. The default is 0, which means the process is killed immediately.
- set_
simulated - The function can be used in test environments to disable real-time functions but keep all methods running with no errors
- setup_
panic - Sets panic handler to immediately kill the process and its childs with SIGKILL. The process is killed when panic happens in ANY thread
- suicide
- Terminates the current process and all its subprocesses in the specified period of time with SIGKILL command. Useful if a process is unable to shut it down gracefully within a specified period of time.
Type Aliases§
- Result
- The crate result type
Derive Macros§
- Data
Policy - Automatically implements the
DataDeliveryPolicytrait for an enum