pub enum ArmType {
Rm65([i32; 6]),
Rm75([i32; 7]),
Rml63([i32; 6]),
Eco65([i32; 6]),
Gen72([i32; 7]),
}Expand description
机械臂类型
Variants§
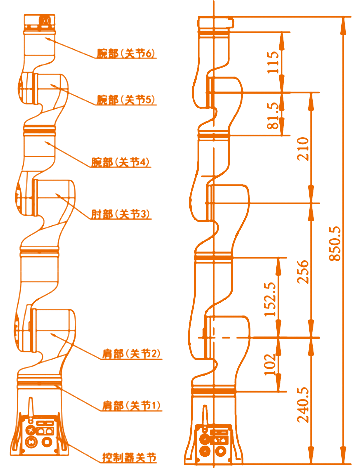
Rm65([i32; 6])
RM65机器人本体模仿人的手臂,共有6个旋转关节,每个关节表示1个自由度。机器人关节包括肩部(关节1),肩部(关节2),肘部(关节3),腕部(关节4),腕部(关节5)和腕部(关节6)。
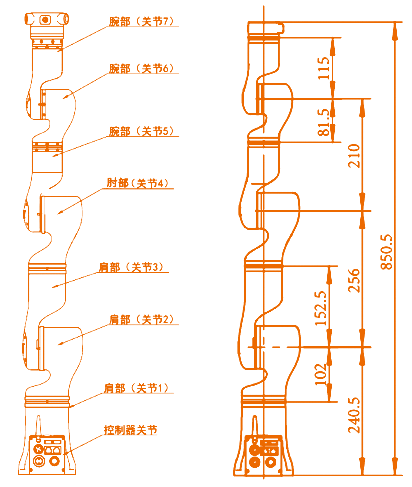
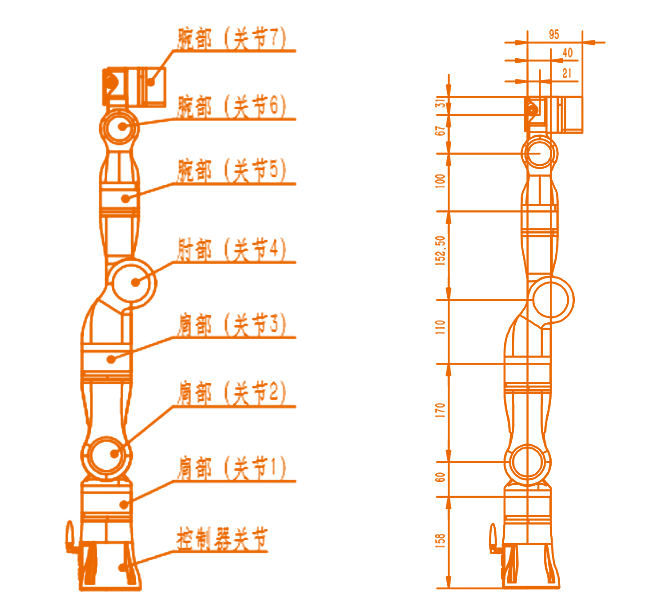
Rm75([i32; 7])
RM75机器人本体模仿人的手臂,共有7个旋转关节,每个关节表示1个自由度。机器人关节包括肩部(关节1),肩部(关节2),肩部(关节3),肘部(关节4),腕部(关节5),腕部(关节6)和腕部(关节7)。
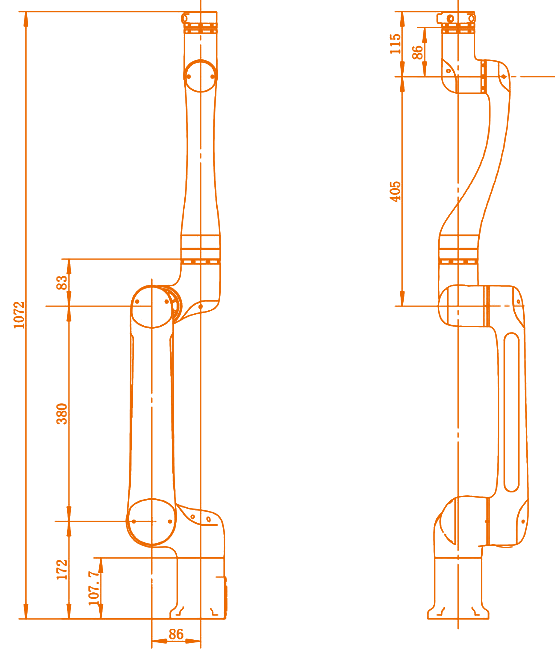
Rml63([i32; 6])
RML63机器人本体模仿人的手臂,共有6个旋转关节,每个关节表示1个自由度。机器人关节包括肩部(关节1),肩部(关节2),肘部(关节3),腕部(关节4),腕部(关节5)和腕部(关节6)。
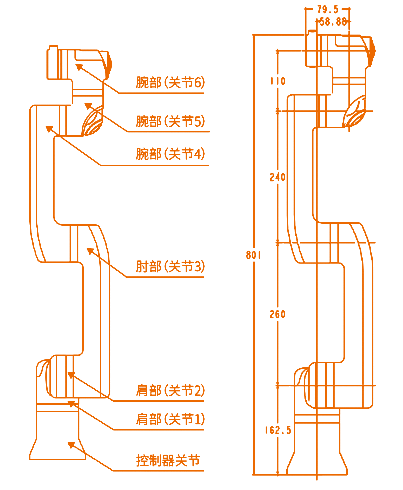
Eco65([i32; 6])
ECO65机器人本体模仿人的手臂,共有6个旋转关节,每个关节表示1个自由度。机器人关节包括肩部(关节1),肩部(关节2),肘部(关节3),腕部(关节4),腕部(关节5)和腕部(关节6)。
Gen72([i32; 7])
GEN72机器人共有 7 个旋转关节,每个关节表示 1 个自由度。机器人关节包括肩部(关节 1),肩部(关节 2),肩部(关节 3),肘部(关节 4),腕部(关节5),腕部(关节 6)和腕部(关节 7)。
Trait Implementations§
impl Copy for ArmType
Auto Trait Implementations§
impl Freeze for ArmType
impl RefUnwindSafe for ArmType
impl Send for ArmType
impl Sync for ArmType
impl Unpin for ArmType
impl UnwindSafe for ArmType
Blanket Implementations§
Source§impl<T> BorrowMut<T> for Twhere
T: ?Sized,
impl<T> BorrowMut<T> for Twhere
T: ?Sized,
Source§fn borrow_mut(&mut self) -> &mut T
fn borrow_mut(&mut self) -> &mut T
Mutably borrows from an owned value. Read more