[−][src]Crate hierarchical_pathfinding
A crate to quickly approximate Paths on a Grid.
Introduction
Finding Paths on a Grid is an expensive Operation. Consider the following Setup:
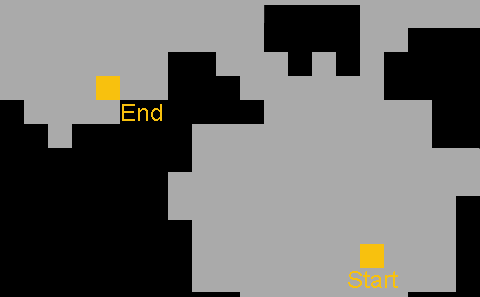
In order to calculate a Path from Start to End using regular A*, it is necessary to check a lot of Tiles:
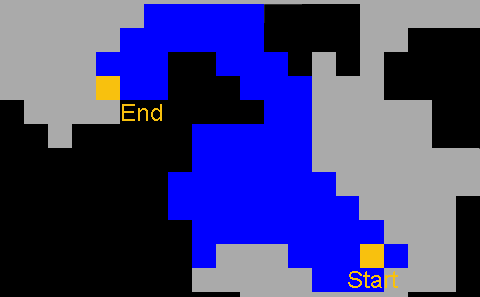
(This is simply a small example, longer Paths require a quadratic increase in Tile checks, and unreachable Goals require the check of every single Tile)
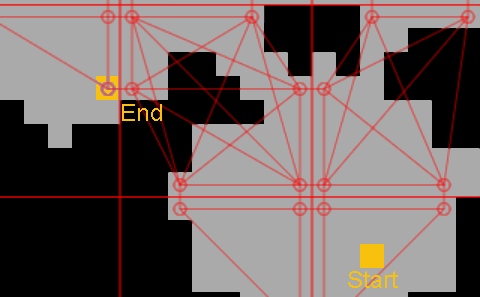
The Solution that Hierarchical Pathfinding provides is to divide the Grid into Chunks and cache the Paths between Chunk entrances as a Graph of Nodes:
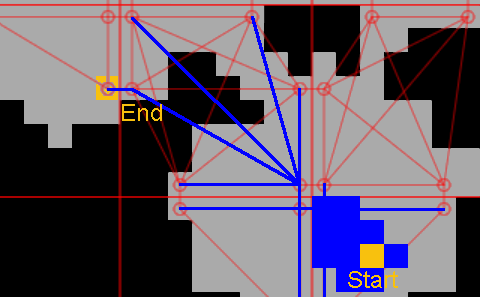
This allows Paths to be generated by connecting the Start and End to the Nodes within the Chunk and using the Graph for the rest:
Since the Graph is not an exact representation of the Grid, the resulting Paths will
be slightly worse than the actual best Path (unless config.perfect_paths
is set to true). This is usually not a problem, since the purpose of Hierarchical Pathfinding
is to quickly find the next direction to go in or a Heuristic for the Cost and existence
of a Path.
The only time where the actual best Path would noticeably differ is in the case of short Paths. That is why this crate calls the regular A* search after HPA* confirmed the length and existence. (This behavior can be turned of using the Config).
This crate provides an implementation of a Hierarchical Pathfinding Algorithm for any generic Grid. Paths can be searched using either A* for a Path to a single Tile, or Dijkstra for searching multiple Targets. It handles solid walls in the Grid and actually finding a Path to a wall.
Examples
Creating the Cache:
use hierarchical_pathfinding::{prelude::*, Point}; // create and initialize Grid // 0 = empty, 1 = swamp, 2 = wall let mut grid = [ [0, 2, 0, 0, 0], [0, 2, 2, 2, 0], [0, 1, 0, 0, 0], [0, 1, 0, 2, 0], [0, 0, 0, 2, 0], ]; let (width, height) = (grid.len(), grid[0].len()); let cost_map = [ 1, // empty 10, // swamp -1, // wall = solid ]; let mut pathfinding = PathCache::new( (width, height), // the size of the Grid |(x, y)| cost_map[grid[y][x]], // get the cost for walking over a Tile ManhattanNeighborhood::new(width, height), // the Neighborhood PathCacheConfig { chunk_size: 3, ..Default::default() }, // config );
Note that the PathCache never actually asks for the Grid itself. This allows the user to store the Grid in any format they want (Array, Vec, HashMap, kd-tree, ...), as long as they are somehow able to access a specific (x, y) on the Grid when asked.
The provided function takes a Position on the Grid as parameter and returns, how "expensive" it is to walk across the Tile at that Position. This Cost is what will be used for calculating the Cost of a Path to find the most optimal one. A negative Cost implies that the Tile cannot be walked across.
Unfortunately, it is necessary to provide this function to every method of PathCache, since storing it would make the Grid immutable. See also Updating the PathCache.
Note: If copying the Cost function everywhere would create too much Code / less readable code, currying may be used:
const COST_MAP: [isize; 3] = [1, 10, -1]; // only references the Grid when called fn cost_fn<'a>(grid: &'a [[usize; 5]; 5]) -> impl 'a + FnMut(Point) -> isize { move |(x, y)| COST_MAP[grid[y][x]] } let mut pathfinding = PathCache::new( (width, height), // the size of the Grid // simply call the creator function to take a reference of the Grid cost_fn(&grid), // ... ); // ... let path = pathfinding.find_path( start, goal, // function can be reused at any time cost_fn(&grid), );
Pathfinding
Finding the Path to a single Goal:
let start = (0, 0); let goal = (4, 4); // find_path returns Some(Path) on success let path = pathfinding.find_path( start, goal, cost_fn(&grid), ); assert!(path.is_some()); let mut path = path.unwrap(); assert_eq!(path.cost(), 12);
For more information, see find_path.
Finding multiple Goals:
let start = (0, 0); let goals = [(4, 4), (2, 0)]; // find_paths returns a HashMap<goal, Path> for all successes let paths = pathfinding.find_paths( start, &goals, cost_fn(&grid), ); // (4, 4) is reachable assert!(paths.contains_key(&goals[0])); // (2, 0) is not reachable assert!(!paths.contains_key(&goals[1]));
For more information, see find_paths.
Using a Path
The easiest information obtainable from a Path is its existence. Despite being an approximation of an optimal Path, HPA* is 100% correct when it comes to the existence of a Path. Meaning that if HPA* cannot find a Path, no one can, and if HPA* returns a Path, it is valid, given correct Neighborhood and Cost functions.
The next step is to obtain information about the Path itself. The part that is always available is the total Cost of the Path. Once again, it is just an approximation. However, it gives a pretty good estimate of the actual Cost, with only minimal deviations.
As for following the Path, HPA* was designed to allow Units to immediately start moving
and minimize lost time when the surroundings change in a way that alters the Path.
That is why it does not calculate the full Path immediately. It does, however, generate
the first steps of the Path without too much overhead. That is why it is advised to
mostly use the next() method of the returned Path for a few steps.
let mut player = Player { pos: (0, 0), //... }; let goal = (4, 4); let mut path = pathfinding.find_path( player.pos, goal, cost_fn(&grid), ).unwrap(); player.move_to(path.next().unwrap()); assert_eq!(player.pos, (0, 1)); // wait for next turn or whatever player.move_to(path.next().unwrap()); assert_eq!(player.pos, (0, 2));
Updating the PathCache
The PathCache does not contain a copy or reference of the Grid for mutability and Ownership reasons. This means however, that the user is responsible for storing and maintaining both the Grid and the PathCache. It is also necessary to update the PathCache when the Grid has changed to keep it consistent:
let (start, goal) = ((0, 0), (2, 0)); let path = pathfinding.find_path(start, goal, cost_fn(&grid)); assert!(path.is_none()); grid[0][1] = 0; grid[4][4] = 2; assert_eq!(grid, [ [0, 0, 0, 0, 0], [0, 2, 2, 2, 2], [0, 1, 0, 0, 0], [0, 1, 0, 2, 0], [0, 0, 0, 2, 2], ]); pathfinding.tiles_changed( &[(1, 0), (4, 4)], cost_fn(&grid), ); let path = pathfinding.find_path(start, goal, cost_fn(&grid)); assert!(path.is_some());
Configuration
The last parameter for PathCache::new is a PathCacheConfig object with different options to have more control over the generated PathCache.
These options are mostly used to adjust the balance between Performance and Memory Usage, with the default values aiming more at Performance.
The PathCacheConfig struct also provides defaults for low Memory Usage PathCacheConfig::LOW_MEM
or best Performance PathCacheConfig::HIGH_PERFORMANCE
let mut pathfinding = PathCache::new( (width, height), // the size of the Grid cost_fn(&grid), // get the cost for walking over a Tile ManhattanNeighborhood::new(width, height), // the Neighborhood PathCacheConfig { chunk_size: 3, ..PathCacheConfig::LOW_MEM } ); assert_eq!(pathfinding.config().chunk_size, 3);
Modules
| generics | A Module for generic implementations. |
| neighbors | A crate with the most common Neighborhoods |
| node_id | A Module with some utilities for working with NodeIDs |
| prelude | The prelude for this crate. |
Structs
| AbstractPath | A Path that may not be fully calculated yet. |
| PathCache | A struct to store the Hierarchical Pathfinding information. |
| PathCacheConfig | Options for configuring the |
Type Definitions
| NodeID | The Type used to reference a Node in the abstracted Graph |
| Point | A shorthand for Points on the grid |