//! # Camera Calibration and 3D Reconstruction
//!
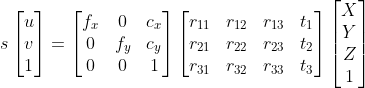
//! The functions in this section use a so-called pinhole camera model. In this model, a scene view is
//! formed by projecting 3D points into the image plane using a perspective transformation.
//!
//! 
//!
//! or
//!
//! 
//!
//! where:
//!
//! *  are the coordinates of a 3D point in the world coordinate space
//! *  are the coordinates of the projection point in pixels
//! *  is a camera matrix, or a matrix of intrinsic parameters
//! *  is a principal point that is usually at the image center
//! *  are the focal lengths expressed in pixel units.
//!
//! Thus, if an image from the camera is scaled by a factor, all of these parameters should be scaled
//! (multiplied/divided, respectively) by the same factor. The matrix of intrinsic parameters does not
//! depend on the scene viewed. So, once estimated, it can be re-used as long as the focal length is
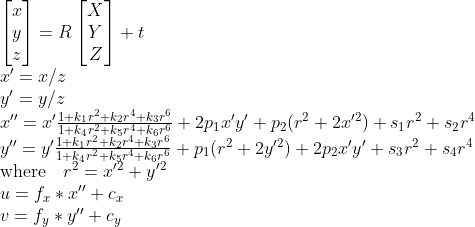
//! fixed (in case of zoom lens). The joint rotation-translation matrix  is called a matrix of
//! extrinsic parameters. It is used to describe the camera motion around a static scene, or vice versa,
//! rigid motion of an object in front of a still camera. That is,  translates coordinates of a
//! point  to a coordinate system, fixed with respect to the camera. The transformation above
//! is equivalent to the following (when  ):
//!
//! 
//!
//! The following figure illustrates the pinhole camera model.
//!
//! 
//!
//! Real lenses usually have some distortion, mostly radial distortion and slight tangential distortion.
//! So, the above model is extended as:
//!
//! 
//!
//! , , , , , and  are radial distortion coefficients.  and  are
//! tangential distortion coefficients. , , , and , are the thin prism distortion
//! coefficients. Higher-order coefficients are not considered in OpenCV.
//!
//! The next figure shows two common types of radial distortion: barrel distortion (typically  and pincushion distortion (typically ).
//!
//! 
//!
//! In some cases the image sensor may be tilted in order to focus an oblique plane in front of the
//! camera (Scheimpfug condition). This can be useful for particle image velocimetry (PIV) or
//! triangulation with a laser fan. The tilt causes a perspective distortion of  and
//! . This distortion can be modelled in the following way, see e.g. [Louhichi07](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_Louhichi07).
//!
//! 
//!
//! where the matrix  is defined by two rotations with angular parameter 
//! and , respectively,
//!
//! 
//!
//! In the functions below the coefficients are passed or returned as
//!
//! 
//!
//! vector. That is, if the vector contains four elements, it means that  . The distortion
//! coefficients do not depend on the scene viewed. Thus, they also belong to the intrinsic camera
//! parameters. And they remain the same regardless of the captured image resolution. If, for example, a
//! camera has been calibrated on images of 320 x 240 resolution, absolutely the same distortion
//! coefficients can be used for 640 x 480 images from the same camera while , , , and
//!  need to be scaled appropriately.
//!
//! The functions below use the above model to do the following:
//!
//! * Project 3D points to the image plane given intrinsic and extrinsic parameters.
//! * Compute extrinsic parameters given intrinsic parameters, a few 3D points, and their
//! projections.
//! * Estimate intrinsic and extrinsic camera parameters from several views of a known calibration
//! pattern (every view is described by several 3D-2D point correspondences).
//! * Estimate the relative position and orientation of the stereo camera "heads" and compute the
//! *rectification* transformation that makes the camera optical axes parallel.
//!
//!
//! Note:
//! * A calibration sample for 3 cameras in horizontal position can be found at
//! opencv_source_code/samples/cpp/3calibration.cpp
//! * A calibration sample based on a sequence of images can be found at
//! opencv_source_code/samples/cpp/calibration.cpp
//! * A calibration sample in order to do 3D reconstruction can be found at
//! opencv_source_code/samples/cpp/build3dmodel.cpp
//! * A calibration sample of an artificially generated camera and chessboard patterns can be
//! found at opencv_source_code/samples/cpp/calibration_artificial.cpp
//! * A calibration example on stereo calibration can be found at
//! opencv_source_code/samples/cpp/stereo_calib.cpp
//! * A calibration example on stereo matching can be found at
//! opencv_source_code/samples/cpp/stereo_match.cpp
//! * (Python) A camera calibration sample can be found at
//! opencv_source_code/samples/python/calibrate.py
//! # Fisheye camera model
//!
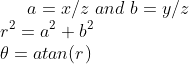
//! Definitions: Let P be a point in 3D of coordinates X in the world reference frame (stored in the
//! matrix X) The coordinate vector of P in the camera reference frame is:
//!
//! 
//!
//! where R is the rotation matrix corresponding to the rotation vector om: R = rodrigues(om); call x, y
//! and z the 3 coordinates of Xc:
//!
//! 
//!
//! The pinhole projection coordinates of P is [a; b] where
//!
//! 
//!
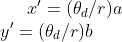
//! Fisheye distortion:
//!
//! 
//!
//! The distorted point coordinates are [x'; y'] where
//!
//! 
//!
//! Finally, conversion into pixel coordinates: The final pixel coordinates vector [u; v] where:
//!
//! 
//!
//! # C API
use std::os::raw::{c_char, c_void};
use libc::{ptrdiff_t, size_t};
use crate::{Error, Result, core, sys, types};
use crate::core::{_InputArray, _OutputArray};
pub const CALIB_CB_ADAPTIVE_THRESH: i32 = 1;
pub const CALIB_CB_ASYMMETRIC_GRID: i32 = 2;
pub const CALIB_CB_CLUSTERING: i32 = 4;
pub const CALIB_CB_FAST_CHECK: i32 = 8;
pub const CALIB_CB_FILTER_QUADS: i32 = 4;
pub const CALIB_CB_NORMALIZE_IMAGE: i32 = 2;
pub const CALIB_CB_SYMMETRIC_GRID: i32 = 1;
pub const CALIB_CHECK_COND: i32 = 1 << 2;
pub const CALIB_FIX_ASPECT_RATIO: i32 = 0x00002;
pub const CALIB_FIX_FOCAL_LENGTH: i32 = 0x00010;
pub const CALIB_FIX_INTRINSIC: i32 = 0x00100;
pub const CALIB_FIX_K1: i32 = 0x00020;
pub const CALIB_FIX_K2: i32 = 0x00040;
pub const CALIB_FIX_K3: i32 = 0x00080;
pub const CALIB_FIX_K4: i32 = 0x00800;
pub const CALIB_FIX_K5: i32 = 0x01000;
pub const CALIB_FIX_K6: i32 = 0x02000;
pub const CALIB_FIX_PRINCIPAL_POINT: i32 = 0x00004;
pub const CALIB_FIX_S1_S2_S3_S4: i32 = 0x10000;
pub const CALIB_FIX_SKEW: i32 = 1 << 3;
pub const CALIB_FIX_TAUX_TAUY: i32 = 0x80000;
pub const CALIB_RATIONAL_MODEL: i32 = 0x04000;
pub const CALIB_RECOMPUTE_EXTRINSIC: i32 = 1 << 1;
pub const CALIB_SAME_FOCAL_LENGTH: i32 = 0x00200;
pub const CALIB_THIN_PRISM_MODEL: i32 = 0x08000;
pub const CALIB_TILTED_MODEL: i32 = 0x40000;
pub const CALIB_USE_INTRINSIC_GUESS: i32 = 0x00001;
/// use LU instead of SVD decomposition for solving. much faster but potentially less precise
pub const CALIB_USE_LU: i32 = (1 << 17);
/// use QR instead of SVD decomposition for solving. Faster but potentially less precise
pub const CALIB_USE_QR: i32 = 0x100000;
pub const CALIB_ZERO_DISPARITY: i32 = 0x00400;
pub const CALIB_ZERO_TANGENT_DIST: i32 = 0x00008;
/// 7-point algorithm
pub const FM_7POINT: i32 = 1;
/// 8-point algorithm
pub const FM_8POINT: i32 = 2;
/// least-median algorithm
pub const FM_LMEDS: i32 = 4;
/// RANSAC algorithm
pub const FM_RANSAC: i32 = 8;
/// least-median algorithm
pub const LMEDS: i32 = 4;
/// RANSAC algorithm
pub const RANSAC: i32 = 8;
/// RHO algorithm
pub const RHO: i32 = 16;
/// A Direct Least-Squares (DLS) Method for PnP [hesch2011direct](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_hesch2011direct)
pub const SOLVEPNP_DLS: i32 = 3;
/// EPnP: Efficient Perspective-n-Point Camera Pose Estimation [lepetit2009epnp](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_lepetit2009epnp)
pub const SOLVEPNP_EPNP: i32 = 1;
pub const SOLVEPNP_ITERATIVE: i32 = 0;
/// Complete Solution Classification for the Perspective-Three-Point Problem [gao2003complete](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_gao2003complete)
pub const SOLVEPNP_P3P: i32 = 2;
/// Exhaustive Linearization for Robust Camera Pose and Focal Length Estimation [penate2013exhaustive](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_penate2013exhaustive)
pub const SOLVEPNP_UPNP: i32 = 4;
pub const StereoBM_PREFILTER_NORMALIZED_RESPONSE: i32 = 0;
pub const StereoBM_PREFILTER_XSOBEL: i32 = 1;
pub const StereoMatcher_DISP_SHIFT: i32 = 4;
pub const StereoSGBM_MODE_HH: i32 = 1;
pub const StereoSGBM_MODE_SGBM: i32 = 0;
pub const StereoSGBM_MODE_SGBM_3WAY: i32 = 2;
/// Computes an RQ decomposition of 3x3 matrices.
///
/// ## Parameters
/// * src: 3x3 input matrix.
/// * mtxR: Output 3x3 upper-triangular matrix.
/// * mtxQ: Output 3x3 orthogonal matrix.
/// * Qx: Optional output 3x3 rotation matrix around x-axis.
/// * Qy: Optional output 3x3 rotation matrix around y-axis.
/// * Qz: Optional output 3x3 rotation matrix around z-axis.
///
/// The function computes a RQ decomposition using the given rotations. This function is used in
/// decomposeProjectionMatrix to decompose the left 3x3 submatrix of a projection matrix into a camera
/// and a rotation matrix.
///
/// It optionally returns three rotation matrices, one for each axis, and the three Euler angles in
/// degrees (as the return value) that could be used in OpenGL. Note, there is always more than one
/// sequence of rotations about the three principal axes that results in the same orientation of an
/// object, eg. see [Slabaugh](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_Slabaugh) . Returned tree rotation matrices and corresponding three Euler angules
/// are only one of the possible solutions.
///
/// ## C++ default parameters
/// * qx: noArray()
/// * qy: noArray()
/// * qz: noArray()
pub fn rq_decomp3x3(src: &dyn core::ToInputArray, mtx_r: &mut dyn core::ToOutputArray, mtx_q: &mut dyn core::ToOutputArray, qx: &mut dyn core::ToOutputArray, qy: &mut dyn core::ToOutputArray, qz: &mut dyn core::ToOutputArray) -> Result<core::Vec3d> {
input_array_arg!(src);
output_array_arg!(mtx_r);
output_array_arg!(mtx_q);
output_array_arg!(qx);
output_array_arg!(qy);
output_array_arg!(qz);
unsafe { sys::cv_RQDecomp3x3__InputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray(src.as_raw__InputArray(), mtx_r.as_raw__OutputArray(), mtx_q.as_raw__OutputArray(), qx.as_raw__OutputArray(), qy.as_raw__OutputArray(), qz.as_raw__OutputArray()) }.into_result()
}
/// Converts a rotation matrix to a rotation vector or vice versa.
///
/// ## Parameters
/// * src: Input rotation vector (3x1 or 1x3) or rotation matrix (3x3).
/// * dst: Output rotation matrix (3x3) or rotation vector (3x1 or 1x3), respectively.
/// * jacobian: Optional output Jacobian matrix, 3x9 or 9x3, which is a matrix of partial
/// derivatives of the output array components with respect to the input array components.
///
/// 
///
/// Inverse transformation can be also done easily, since
///
/// 
///
/// A rotation vector is a convenient and most compact representation of a rotation matrix (since any
/// rotation matrix has just 3 degrees of freedom). The representation is used in the global 3D geometry
/// optimization procedures like calibrateCamera, stereoCalibrate, or solvePnP .
///
/// ## C++ default parameters
/// * jacobian: noArray()
pub fn rodrigues(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, jacobian: &mut dyn core::ToOutputArray) -> Result<()> {
input_array_arg!(src);
output_array_arg!(dst);
output_array_arg!(jacobian);
unsafe { sys::cv_Rodrigues__InputArray__OutputArray__OutputArray(src.as_raw__InputArray(), dst.as_raw__OutputArray(), jacobian.as_raw__OutputArray()) }.into_result()
}
/// Finds the camera intrinsic and extrinsic parameters from several views of a calibration pattern.
///
/// ## Parameters
/// * objectPoints: In the new interface it is a vector of vectors of calibration pattern points in
/// the calibration pattern coordinate space (e.g. std::vector<std::vector<cv::Vec3f>>). The outer
/// vector contains as many elements as the number of the pattern views. If the same calibration pattern
/// is shown in each view and it is fully visible, all the vectors will be the same. Although, it is
/// possible to use partially occluded patterns, or even different patterns in different views. Then,
/// the vectors will be different. The points are 3D, but since they are in a pattern coordinate system,
/// then, if the rig is planar, it may make sense to put the model to a XY coordinate plane so that
/// Z-coordinate of each input object point is 0.
/// In the old interface all the vectors of object points from different views are concatenated
/// together.
/// * imagePoints: In the new interface it is a vector of vectors of the projections of calibration
/// pattern points (e.g. std::vector<std::vector<cv::Vec2f>>). imagePoints.size() and
/// objectPoints.size() and imagePoints[i].size() must be equal to objectPoints[i].size() for each i.
/// In the old interface all the vectors of object points from different views are concatenated
/// together.
/// * imageSize: Size of the image used only to initialize the intrinsic camera matrix.
/// * cameraMatrix: Output 3x3 floating-point camera matrix
///  . If CV\_CALIB\_USE\_INTRINSIC\_GUESS
/// and/or CV_CALIB_FIX_ASPECT_RATIO are specified, some or all of fx, fy, cx, cy must be
/// initialized before calling the function.
/// * distCoeffs: Output vector of distortion coefficients
///  of
/// 4, 5, 8, 12 or 14 elements.
/// * rvecs: Output vector of rotation vectors (see Rodrigues ) estimated for each pattern view
/// (e.g. std::vector<cv::Mat>>). That is, each k-th rotation vector together with the corresponding
/// k-th translation vector (see the next output parameter description) brings the calibration pattern
/// from the model coordinate space (in which object points are specified) to the world coordinate
/// space, that is, a real position of the calibration pattern in the k-th pattern view (k=0.. *M* -1).
/// * tvecs: Output vector of translation vectors estimated for each pattern view.
/// * stdDeviationsIntrinsics: Output vector of standard deviations estimated for intrinsic parameters.
/// Order of deviations values:
///  If one of parameters is not estimated, it's deviation is equals to zero.
/// * stdDeviationsExtrinsics: Output vector of standard deviations estimated for extrinsic parameters.
/// Order of deviations values:  where M is number of pattern views,
///  are concatenated 1x3 vectors.
/// * perViewErrors: Output vector of the RMS re-projection error estimated for each pattern view.
/// * flags: Different flags that may be zero or a combination of the following values:
/// * **CV_CALIB_USE_INTRINSIC_GUESS** cameraMatrix contains valid initial values of
/// fx, fy, cx, cy that are optimized further. Otherwise, (cx, cy) is initially set to the image
/// center ( imageSize is used), and focal distances are computed in a least-squares fashion.
/// Note, that if intrinsic parameters are known, there is no need to use this function just to
/// estimate extrinsic parameters. Use solvePnP instead.
/// * **CV_CALIB_FIX_PRINCIPAL_POINT** The principal point is not changed during the global
/// optimization. It stays at the center or at a different location specified when
/// CV_CALIB_USE_INTRINSIC_GUESS is set too.
/// * **CV_CALIB_FIX_ASPECT_RATIO** The functions considers only fy as a free parameter. The
/// ratio fx/fy stays the same as in the input cameraMatrix . When
/// CV_CALIB_USE_INTRINSIC_GUESS is not set, the actual input values of fx and fy are
/// ignored, only their ratio is computed and used further.
/// * **CV_CALIB_ZERO_TANGENT_DIST** Tangential distortion coefficients  are set
/// to zeros and stay zero.
/// * **CV_CALIB_FIX_K1,...,CV_CALIB_FIX_K6** The corresponding radial distortion
/// coefficient is not changed during the optimization. If CV_CALIB_USE_INTRINSIC_GUESS is
/// set, the coefficient from the supplied distCoeffs matrix is used. Otherwise, it is set to 0.
/// * **CV_CALIB_RATIONAL_MODEL** Coefficients k4, k5, and k6 are enabled. To provide the
/// backward compatibility, this extra flag should be explicitly specified to make the
/// calibration function use the rational model and return 8 coefficients. If the flag is not
/// set, the function computes and returns only 5 distortion coefficients.
/// * **CALIB_THIN_PRISM_MODEL** Coefficients s1, s2, s3 and s4 are enabled. To provide the
/// backward compatibility, this extra flag should be explicitly specified to make the
/// calibration function use the thin prism model and return 12 coefficients. If the flag is not
/// set, the function computes and returns only 5 distortion coefficients.
/// * **CALIB_FIX_S1_S2_S3_S4** The thin prism distortion coefficients are not changed during
/// the optimization. If CV_CALIB_USE_INTRINSIC_GUESS is set, the coefficient from the
/// supplied distCoeffs matrix is used. Otherwise, it is set to 0.
/// * **CALIB_TILTED_MODEL** Coefficients tauX and tauY are enabled. To provide the
/// backward compatibility, this extra flag should be explicitly specified to make the
/// calibration function use the tilted sensor model and return 14 coefficients. If the flag is not
/// set, the function computes and returns only 5 distortion coefficients.
/// * **CALIB_FIX_TAUX_TAUY** The coefficients of the tilted sensor model are not changed during
/// the optimization. If CV_CALIB_USE_INTRINSIC_GUESS is set, the coefficient from the
/// supplied distCoeffs matrix is used. Otherwise, it is set to 0.
/// * criteria: Termination criteria for the iterative optimization algorithm.
///
/// ## Returns
/// the overall RMS re-projection error.
///
/// The function estimates the intrinsic camera parameters and extrinsic parameters for each of the
/// views. The algorithm is based on [Zhang2000](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_Zhang2000) and [BouguetMCT](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_BouguetMCT) . The coordinates of 3D object
/// points and their corresponding 2D projections in each view must be specified. That may be achieved
/// by using an object with a known geometry and easily detectable feature points. Such an object is
/// called a calibration rig or calibration pattern, and OpenCV has built-in support for a chessboard as
/// a calibration rig (see findChessboardCorners ). Currently, initialization of intrinsic parameters
/// (when CV_CALIB_USE_INTRINSIC_GUESS is not set) is only implemented for planar calibration
/// patterns (where Z-coordinates of the object points must be all zeros). 3D calibration rigs can also
/// be used as long as initial cameraMatrix is provided.
///
/// The algorithm performs the following steps:
///
/// * Compute the initial intrinsic parameters (the option only available for planar calibration
/// patterns) or read them from the input parameters. The distortion coefficients are all set to
/// zeros initially unless some of CV_CALIB_FIX_K? are specified.
///
/// * Estimate the initial camera pose as if the intrinsic parameters have been already known. This is
/// done using solvePnP .
///
/// * Run the global Levenberg-Marquardt optimization algorithm to minimize the reprojection error,
/// that is, the total sum of squared distances between the observed feature points imagePoints and
/// the projected (using the current estimates for camera parameters and the poses) object points
/// objectPoints. See projectPoints for details.
///
///
/// Note:
/// If you use a non-square (=non-NxN) grid and findChessboardCorners for calibration, and
/// calibrateCamera returns bad values (zero distortion coefficients, an image center very far from
/// (w/2-0.5,h/2-0.5), and/or large differences between  and  (ratios of 10:1 or more)),
/// then you have probably used patternSize=cvSize(rows,cols) instead of using
/// patternSize=cvSize(cols,rows) in findChessboardCorners .
///
/// ## See also
/// findChessboardCorners, solvePnP, initCameraMatrix2D, stereoCalibrate, undistort
///
/// ## C++ default parameters
/// * flags: 0
/// * criteria: TermCriteria( TermCriteria::COUNT + TermCriteria::EPS, 30, DBL_EPSILON)
pub fn calibrate_camera_with_stddev(object_points: &dyn core::ToInputArray, image_points: &dyn core::ToInputArray, image_size: core::Size, camera_matrix: &mut dyn core::ToInputOutputArray, dist_coeffs: &mut dyn core::ToInputOutputArray, rvecs: &mut dyn core::ToOutputArray, tvecs: &mut dyn core::ToOutputArray, std_deviations_intrinsics: &mut dyn core::ToOutputArray, std_deviations_extrinsics: &mut dyn core::ToOutputArray, per_view_errors: &mut dyn core::ToOutputArray, flags: i32, criteria: &core::TermCriteria) -> Result<f64> {
input_array_arg!(object_points);
input_array_arg!(image_points);
input_output_array_arg!(camera_matrix);
input_output_array_arg!(dist_coeffs);
output_array_arg!(rvecs);
output_array_arg!(tvecs);
output_array_arg!(std_deviations_intrinsics);
output_array_arg!(std_deviations_extrinsics);
output_array_arg!(per_view_errors);
unsafe { sys::cv_calibrateCamera__InputArray__InputArray_Size__InputOutputArray__InputOutputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray_int_TermCriteria(object_points.as_raw__InputArray(), image_points.as_raw__InputArray(), image_size, camera_matrix.as_raw__InputOutputArray(), dist_coeffs.as_raw__InputOutputArray(), rvecs.as_raw__OutputArray(), tvecs.as_raw__OutputArray(), std_deviations_intrinsics.as_raw__OutputArray(), std_deviations_extrinsics.as_raw__OutputArray(), per_view_errors.as_raw__OutputArray(), flags, criteria.as_raw_TermCriteria()) }.into_result()
}
/// Finds the camera intrinsic and extrinsic parameters from several views of a calibration pattern.
///
/// ## Parameters
/// * objectPoints: In the new interface it is a vector of vectors of calibration pattern points in
/// the calibration pattern coordinate space (e.g. std::vector<std::vector<cv::Vec3f>>). The outer
/// vector contains as many elements as the number of the pattern views. If the same calibration pattern
/// is shown in each view and it is fully visible, all the vectors will be the same. Although, it is
/// possible to use partially occluded patterns, or even different patterns in different views. Then,
/// the vectors will be different. The points are 3D, but since they are in a pattern coordinate system,
/// then, if the rig is planar, it may make sense to put the model to a XY coordinate plane so that
/// Z-coordinate of each input object point is 0.
/// In the old interface all the vectors of object points from different views are concatenated
/// together.
/// * imagePoints: In the new interface it is a vector of vectors of the projections of calibration
/// pattern points (e.g. std::vector<std::vector<cv::Vec2f>>). imagePoints.size() and
/// objectPoints.size() and imagePoints[i].size() must be equal to objectPoints[i].size() for each i.
/// In the old interface all the vectors of object points from different views are concatenated
/// together.
/// * imageSize: Size of the image used only to initialize the intrinsic camera matrix.
/// * cameraMatrix: Output 3x3 floating-point camera matrix
///  . If CV\_CALIB\_USE\_INTRINSIC\_GUESS
/// and/or CV_CALIB_FIX_ASPECT_RATIO are specified, some or all of fx, fy, cx, cy must be
/// initialized before calling the function.
/// * distCoeffs: Output vector of distortion coefficients
///  of
/// 4, 5, 8, 12 or 14 elements.
/// * rvecs: Output vector of rotation vectors (see Rodrigues ) estimated for each pattern view
/// (e.g. std::vector<cv::Mat>>). That is, each k-th rotation vector together with the corresponding
/// k-th translation vector (see the next output parameter description) brings the calibration pattern
/// from the model coordinate space (in which object points are specified) to the world coordinate
/// space, that is, a real position of the calibration pattern in the k-th pattern view (k=0.. *M* -1).
/// * tvecs: Output vector of translation vectors estimated for each pattern view.
/// * stdDeviationsIntrinsics: Output vector of standard deviations estimated for intrinsic parameters.
/// Order of deviations values:
///  If one of parameters is not estimated, it's deviation is equals to zero.
/// * stdDeviationsExtrinsics: Output vector of standard deviations estimated for extrinsic parameters.
/// Order of deviations values:  where M is number of pattern views,
///  are concatenated 1x3 vectors.
/// * perViewErrors: Output vector of the RMS re-projection error estimated for each pattern view.
/// * flags: Different flags that may be zero or a combination of the following values:
/// * **CV_CALIB_USE_INTRINSIC_GUESS** cameraMatrix contains valid initial values of
/// fx, fy, cx, cy that are optimized further. Otherwise, (cx, cy) is initially set to the image
/// center ( imageSize is used), and focal distances are computed in a least-squares fashion.
/// Note, that if intrinsic parameters are known, there is no need to use this function just to
/// estimate extrinsic parameters. Use solvePnP instead.
/// * **CV_CALIB_FIX_PRINCIPAL_POINT** The principal point is not changed during the global
/// optimization. It stays at the center or at a different location specified when
/// CV_CALIB_USE_INTRINSIC_GUESS is set too.
/// * **CV_CALIB_FIX_ASPECT_RATIO** The functions considers only fy as a free parameter. The
/// ratio fx/fy stays the same as in the input cameraMatrix . When
/// CV_CALIB_USE_INTRINSIC_GUESS is not set, the actual input values of fx and fy are
/// ignored, only their ratio is computed and used further.
/// * **CV_CALIB_ZERO_TANGENT_DIST** Tangential distortion coefficients  are set
/// to zeros and stay zero.
/// * **CV_CALIB_FIX_K1,...,CV_CALIB_FIX_K6** The corresponding radial distortion
/// coefficient is not changed during the optimization. If CV_CALIB_USE_INTRINSIC_GUESS is
/// set, the coefficient from the supplied distCoeffs matrix is used. Otherwise, it is set to 0.
/// * **CV_CALIB_RATIONAL_MODEL** Coefficients k4, k5, and k6 are enabled. To provide the
/// backward compatibility, this extra flag should be explicitly specified to make the
/// calibration function use the rational model and return 8 coefficients. If the flag is not
/// set, the function computes and returns only 5 distortion coefficients.
/// * **CALIB_THIN_PRISM_MODEL** Coefficients s1, s2, s3 and s4 are enabled. To provide the
/// backward compatibility, this extra flag should be explicitly specified to make the
/// calibration function use the thin prism model and return 12 coefficients. If the flag is not
/// set, the function computes and returns only 5 distortion coefficients.
/// * **CALIB_FIX_S1_S2_S3_S4** The thin prism distortion coefficients are not changed during
/// the optimization. If CV_CALIB_USE_INTRINSIC_GUESS is set, the coefficient from the
/// supplied distCoeffs matrix is used. Otherwise, it is set to 0.
/// * **CALIB_TILTED_MODEL** Coefficients tauX and tauY are enabled. To provide the
/// backward compatibility, this extra flag should be explicitly specified to make the
/// calibration function use the tilted sensor model and return 14 coefficients. If the flag is not
/// set, the function computes and returns only 5 distortion coefficients.
/// * **CALIB_FIX_TAUX_TAUY** The coefficients of the tilted sensor model are not changed during
/// the optimization. If CV_CALIB_USE_INTRINSIC_GUESS is set, the coefficient from the
/// supplied distCoeffs matrix is used. Otherwise, it is set to 0.
/// * criteria: Termination criteria for the iterative optimization algorithm.
///
/// ## Returns
/// the overall RMS re-projection error.
///
/// The function estimates the intrinsic camera parameters and extrinsic parameters for each of the
/// views. The algorithm is based on [Zhang2000](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_Zhang2000) and [BouguetMCT](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_BouguetMCT) . The coordinates of 3D object
/// points and their corresponding 2D projections in each view must be specified. That may be achieved
/// by using an object with a known geometry and easily detectable feature points. Such an object is
/// called a calibration rig or calibration pattern, and OpenCV has built-in support for a chessboard as
/// a calibration rig (see findChessboardCorners ). Currently, initialization of intrinsic parameters
/// (when CV_CALIB_USE_INTRINSIC_GUESS is not set) is only implemented for planar calibration
/// patterns (where Z-coordinates of the object points must be all zeros). 3D calibration rigs can also
/// be used as long as initial cameraMatrix is provided.
///
/// The algorithm performs the following steps:
///
/// * Compute the initial intrinsic parameters (the option only available for planar calibration
/// patterns) or read them from the input parameters. The distortion coefficients are all set to
/// zeros initially unless some of CV_CALIB_FIX_K? are specified.
///
/// * Estimate the initial camera pose as if the intrinsic parameters have been already known. This is
/// done using solvePnP .
///
/// * Run the global Levenberg-Marquardt optimization algorithm to minimize the reprojection error,
/// that is, the total sum of squared distances between the observed feature points imagePoints and
/// the projected (using the current estimates for camera parameters and the poses) object points
/// objectPoints. See projectPoints for details.
///
///
/// Note:
/// If you use a non-square (=non-NxN) grid and findChessboardCorners for calibration, and
/// calibrateCamera returns bad values (zero distortion coefficients, an image center very far from
/// (w/2-0.5,h/2-0.5), and/or large differences between  and  (ratios of 10:1 or more)),
/// then you have probably used patternSize=cvSize(rows,cols) instead of using
/// patternSize=cvSize(cols,rows) in findChessboardCorners .
///
/// ## See also
/// findChessboardCorners, solvePnP, initCameraMatrix2D, stereoCalibrate, undistort
///
/// ## Overloaded parameters
/// double calibrateCamera( InputArrayOfArrays objectPoints,
/// InputArrayOfArrays imagePoints, Size imageSize,
/// InputOutputArray cameraMatrix, InputOutputArray distCoeffs,
/// OutputArrayOfArrays rvecs, OutputArrayOfArrays tvecs,
/// OutputArray stdDeviations, OutputArray perViewErrors,
/// int flags = 0, TermCriteria criteria = TermCriteria(
/// TermCriteria::COUNT + TermCriteria::EPS, 30, DBL_EPSILON) )
///
/// ## C++ default parameters
/// * flags: 0
/// * criteria: TermCriteria( TermCriteria::COUNT + TermCriteria::EPS, 30, DBL_EPSILON)
pub fn calibrate_camera(object_points: &dyn core::ToInputArray, image_points: &dyn core::ToInputArray, image_size: core::Size, camera_matrix: &mut dyn core::ToInputOutputArray, dist_coeffs: &mut dyn core::ToInputOutputArray, rvecs: &mut dyn core::ToOutputArray, tvecs: &mut dyn core::ToOutputArray, flags: i32, criteria: &core::TermCriteria) -> Result<f64> {
input_array_arg!(object_points);
input_array_arg!(image_points);
input_output_array_arg!(camera_matrix);
input_output_array_arg!(dist_coeffs);
output_array_arg!(rvecs);
output_array_arg!(tvecs);
unsafe { sys::cv_calibrateCamera__InputArray__InputArray_Size__InputOutputArray__InputOutputArray__OutputArray__OutputArray_int_TermCriteria(object_points.as_raw__InputArray(), image_points.as_raw__InputArray(), image_size, camera_matrix.as_raw__InputOutputArray(), dist_coeffs.as_raw__InputOutputArray(), rvecs.as_raw__OutputArray(), tvecs.as_raw__OutputArray(), flags, criteria.as_raw_TermCriteria()) }.into_result()
}
/// Computes useful camera characteristics from the camera matrix.
///
/// ## Parameters
/// * cameraMatrix: Input camera matrix that can be estimated by calibrateCamera or
/// stereoCalibrate .
/// * imageSize: Input image size in pixels.
/// * apertureWidth: Physical width in mm of the sensor.
/// * apertureHeight: Physical height in mm of the sensor.
/// * fovx: Output field of view in degrees along the horizontal sensor axis.
/// * fovy: Output field of view in degrees along the vertical sensor axis.
/// * focalLength: Focal length of the lens in mm.
/// * principalPoint: Principal point in mm.
/// * aspectRatio: 
///
/// The function computes various useful camera characteristics from the previously estimated camera
/// matrix.
///
///
/// Note:
/// Do keep in mind that the unity measure 'mm' stands for whatever unit of measure one chooses for
/// the chessboard pitch (it can thus be any value).
pub fn calibration_matrix_values(camera_matrix: &dyn core::ToInputArray, image_size: core::Size, aperture_width: f64, aperture_height: f64, fovx: &mut f64, fovy: &mut f64, focal_length: &mut f64, principal_point: &mut core::Point2d, aspect_ratio: &mut f64) -> Result<()> {
input_array_arg!(camera_matrix);
unsafe { sys::cv_calibrationMatrixValues__InputArray_Size_double_double_double_double_double_Point2d_double(camera_matrix.as_raw__InputArray(), image_size, aperture_width, aperture_height, fovx, fovy, focal_length, principal_point, aspect_ratio) }.into_result()
}
/// Combines two rotation-and-shift transformations.
///
/// ## Parameters
/// * rvec1: First rotation vector.
/// * tvec1: First translation vector.
/// * rvec2: Second rotation vector.
/// * tvec2: Second translation vector.
/// * rvec3: Output rotation vector of the superposition.
/// * tvec3: Output translation vector of the superposition.
/// * dr3dr1:
/// * dr3dt1:
/// * dr3dr2:
/// * dr3dt2:
/// * dt3dr1:
/// * dt3dt1:
/// * dt3dr2:
/// * dt3dt2: Optional output derivatives of rvec3 or tvec3 with regard to rvec1, rvec2, tvec1 and
/// tvec2, respectively.
///
/// The functions compute:
///
/// 
///
/// where  denotes a rotation vector to a rotation matrix transformation, and
///  denotes the inverse transformation. See Rodrigues for details.
///
/// Also, the functions can compute the derivatives of the output vectors with regards to the input
/// vectors (see matMulDeriv ). The functions are used inside stereoCalibrate but can also be used in
/// your own code where Levenberg-Marquardt or another gradient-based solver is used to optimize a
/// function that contains a matrix multiplication.
///
/// ## C++ default parameters
/// * dr3dr1: noArray()
/// * dr3dt1: noArray()
/// * dr3dr2: noArray()
/// * dr3dt2: noArray()
/// * dt3dr1: noArray()
/// * dt3dt1: noArray()
/// * dt3dr2: noArray()
/// * dt3dt2: noArray()
pub fn compose_rt(rvec1: &dyn core::ToInputArray, tvec1: &dyn core::ToInputArray, rvec2: &dyn core::ToInputArray, tvec2: &dyn core::ToInputArray, rvec3: &mut dyn core::ToOutputArray, tvec3: &mut dyn core::ToOutputArray, dr3dr1: &mut dyn core::ToOutputArray, dr3dt1: &mut dyn core::ToOutputArray, dr3dr2: &mut dyn core::ToOutputArray, dr3dt2: &mut dyn core::ToOutputArray, dt3dr1: &mut dyn core::ToOutputArray, dt3dt1: &mut dyn core::ToOutputArray, dt3dr2: &mut dyn core::ToOutputArray, dt3dt2: &mut dyn core::ToOutputArray) -> Result<()> {
input_array_arg!(rvec1);
input_array_arg!(tvec1);
input_array_arg!(rvec2);
input_array_arg!(tvec2);
output_array_arg!(rvec3);
output_array_arg!(tvec3);
output_array_arg!(dr3dr1);
output_array_arg!(dr3dt1);
output_array_arg!(dr3dr2);
output_array_arg!(dr3dt2);
output_array_arg!(dt3dr1);
output_array_arg!(dt3dt1);
output_array_arg!(dt3dr2);
output_array_arg!(dt3dt2);
unsafe { sys::cv_composeRT__InputArray__InputArray__InputArray__InputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray(rvec1.as_raw__InputArray(), tvec1.as_raw__InputArray(), rvec2.as_raw__InputArray(), tvec2.as_raw__InputArray(), rvec3.as_raw__OutputArray(), tvec3.as_raw__OutputArray(), dr3dr1.as_raw__OutputArray(), dr3dt1.as_raw__OutputArray(), dr3dr2.as_raw__OutputArray(), dr3dt2.as_raw__OutputArray(), dt3dr1.as_raw__OutputArray(), dt3dt1.as_raw__OutputArray(), dt3dr2.as_raw__OutputArray(), dt3dt2.as_raw__OutputArray()) }.into_result()
}
/// For points in an image of a stereo pair, computes the corresponding epilines in the other image.
///
/// ## Parameters
/// * points: Input points.  or  matrix of type CV_32FC2 or
/// vector\<Point2f\> .
/// * whichImage: Index of the image (1 or 2) that contains the points .
/// * F: Fundamental matrix that can be estimated using findFundamentalMat or stereoRectify .
/// * lines: Output vector of the epipolar lines corresponding to the points in the other image.
/// Each line  is encoded by 3 numbers  .
///
/// For every point in one of the two images of a stereo pair, the function finds the equation of the
/// corresponding epipolar line in the other image.
///
/// From the fundamental matrix definition (see findFundamentalMat ), line  in the second
/// image for the point  in the first image (when whichImage=1 ) is computed as:
///
/// 
///
/// And vice versa, when whichImage=2,  is computed from  as:
///
/// 
///
/// Line coefficients are defined up to a scale. They are normalized so that  .
pub fn compute_correspond_epilines(points: &dyn core::ToInputArray, which_image: i32, f: &dyn core::ToInputArray, lines: &mut dyn core::ToOutputArray) -> Result<()> {
input_array_arg!(points);
input_array_arg!(f);
output_array_arg!(lines);
unsafe { sys::cv_computeCorrespondEpilines__InputArray_int__InputArray__OutputArray(points.as_raw__InputArray(), which_image, f.as_raw__InputArray(), lines.as_raw__OutputArray()) }.into_result()
}
/// Converts points from homogeneous to Euclidean space.
///
/// ## Parameters
/// * src: Input vector of N-dimensional points.
/// * dst: Output vector of N-1-dimensional points.
///
/// The function converts points homogeneous to Euclidean space using perspective projection. That is,
/// each point (x1, x2, ... x(n-1), xn) is converted to (x1/xn, x2/xn, ..., x(n-1)/xn). When xn=0, the
/// output point coordinates will be (0,0,0,...).
pub fn convert_points_from_homogeneous(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> {
input_array_arg!(src);
output_array_arg!(dst);
unsafe { sys::cv_convertPointsFromHomogeneous__InputArray__OutputArray(src.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result()
}
/// Converts points to/from homogeneous coordinates.
///
/// ## Parameters
/// * src: Input array or vector of 2D, 3D, or 4D points.
/// * dst: Output vector of 2D, 3D, or 4D points.
///
/// The function converts 2D or 3D points from/to homogeneous coordinates by calling either
/// convertPointsToHomogeneous or convertPointsFromHomogeneous.
///
///
/// Note: The function is obsolete. Use one of the previous two functions instead.
pub fn convert_points_homogeneous(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> {
input_array_arg!(src);
output_array_arg!(dst);
unsafe { sys::cv_convertPointsHomogeneous__InputArray__OutputArray(src.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result()
}
/// Converts points from Euclidean to homogeneous space.
///
/// ## Parameters
/// * src: Input vector of N-dimensional points.
/// * dst: Output vector of N+1-dimensional points.
///
/// The function converts points from Euclidean to homogeneous space by appending 1's to the tuple of
/// point coordinates. That is, each point (x1, x2, ..., xn) is converted to (x1, x2, ..., xn, 1).
pub fn convert_points_to_homogeneous(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> {
input_array_arg!(src);
output_array_arg!(dst);
unsafe { sys::cv_convertPointsToHomogeneous__InputArray__OutputArray(src.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result()
}
/// Refines coordinates of corresponding points.
///
/// ## Parameters
/// * F: 3x3 fundamental matrix.
/// * points1: 1xN array containing the first set of points.
/// * points2: 1xN array containing the second set of points.
/// * newPoints1: The optimized points1.
/// * newPoints2: The optimized points2.
///
/// The function implements the Optimal Triangulation Method (see Multiple View Geometry for details).
/// For each given point correspondence points1[i] \<-\> points2[i], and a fundamental matrix F, it
/// computes the corrected correspondences newPoints1[i] \<-\> newPoints2[i] that minimize the geometric
/// error  (where  is the
/// geometric distance between points  and  ) subject to the epipolar constraint
///  .
pub fn correct_matches(f: &dyn core::ToInputArray, points1: &dyn core::ToInputArray, points2: &dyn core::ToInputArray, new_points1: &mut dyn core::ToOutputArray, new_points2: &mut dyn core::ToOutputArray) -> Result<()> {
input_array_arg!(f);
input_array_arg!(points1);
input_array_arg!(points2);
output_array_arg!(new_points1);
output_array_arg!(new_points2);
unsafe { sys::cv_correctMatches__InputArray__InputArray__InputArray__OutputArray__OutputArray(f.as_raw__InputArray(), points1.as_raw__InputArray(), points2.as_raw__InputArray(), new_points1.as_raw__OutputArray(), new_points2.as_raw__OutputArray()) }.into_result()
}
/// Decompose an essential matrix to possible rotations and translation.
///
/// ## Parameters
/// * E: The input essential matrix.
/// * R1: One possible rotation matrix.
/// * R2: Another possible rotation matrix.
/// * t: One possible translation.
///
/// This function decompose an essential matrix E using svd decomposition [HartleyZ00](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_HartleyZ00) . Generally 4
/// possible poses exists for a given E. They are , , , . By
/// decomposing E, you can only get the direction of the translation, so the function returns unit t.
pub fn decompose_essential_mat(e: &dyn core::ToInputArray, r1: &mut dyn core::ToOutputArray, r2: &mut dyn core::ToOutputArray, t: &mut dyn core::ToOutputArray) -> Result<()> {
input_array_arg!(e);
output_array_arg!(r1);
output_array_arg!(r2);
output_array_arg!(t);
unsafe { sys::cv_decomposeEssentialMat__InputArray__OutputArray__OutputArray__OutputArray(e.as_raw__InputArray(), r1.as_raw__OutputArray(), r2.as_raw__OutputArray(), t.as_raw__OutputArray()) }.into_result()
}
/// Decompose a homography matrix to rotation(s), translation(s) and plane normal(s).
///
/// ## Parameters
/// * H: The input homography matrix between two images.
/// * K: The input intrinsic camera calibration matrix.
/// * rotations: Array of rotation matrices.
/// * translations: Array of translation matrices.
/// * normals: Array of plane normal matrices.
///
/// This function extracts relative camera motion between two views observing a planar object from the
/// homography H induced by the plane. The intrinsic camera matrix K must also be provided. The function
/// may return up to four mathematical solution sets. At least two of the solutions may further be
/// invalidated if point correspondences are available by applying positive depth constraint (all points
/// must be in front of the camera). The decomposition method is described in detail in [Malis](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_Malis) .
pub fn decompose_homography_mat(h: &dyn core::ToInputArray, k: &dyn core::ToInputArray, rotations: &mut dyn core::ToOutputArray, translations: &mut dyn core::ToOutputArray, normals: &mut dyn core::ToOutputArray) -> Result<i32> {
input_array_arg!(h);
input_array_arg!(k);
output_array_arg!(rotations);
output_array_arg!(translations);
output_array_arg!(normals);
unsafe { sys::cv_decomposeHomographyMat__InputArray__InputArray__OutputArray__OutputArray__OutputArray(h.as_raw__InputArray(), k.as_raw__InputArray(), rotations.as_raw__OutputArray(), translations.as_raw__OutputArray(), normals.as_raw__OutputArray()) }.into_result()
}
/// Decomposes a projection matrix into a rotation matrix and a camera matrix.
///
/// ## Parameters
/// * projMatrix: 3x4 input projection matrix P.
/// * cameraMatrix: Output 3x3 camera matrix K.
/// * rotMatrix: Output 3x3 external rotation matrix R.
/// * transVect: Output 4x1 translation vector T.
/// * rotMatrixX: Optional 3x3 rotation matrix around x-axis.
/// * rotMatrixY: Optional 3x3 rotation matrix around y-axis.
/// * rotMatrixZ: Optional 3x3 rotation matrix around z-axis.
/// * eulerAngles: Optional three-element vector containing three Euler angles of rotation in
/// degrees.
///
/// The function computes a decomposition of a projection matrix into a calibration and a rotation
/// matrix and the position of a camera.
///
/// It optionally returns three rotation matrices, one for each axis, and three Euler angles that could
/// be used in OpenGL. Note, there is always more than one sequence of rotations about the three
/// principal axes that results in the same orientation of an object, eg. see [Slabaugh](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_Slabaugh) . Returned
/// tree rotation matrices and corresponding three Euler angules are only one of the possible solutions.
///
/// The function is based on RQDecomp3x3 .
///
/// ## C++ default parameters
/// * rot_matrix_x: noArray()
/// * rot_matrix_y: noArray()
/// * rot_matrix_z: noArray()
/// * euler_angles: noArray()
pub fn decompose_projection_matrix(proj_matrix: &dyn core::ToInputArray, camera_matrix: &mut dyn core::ToOutputArray, rot_matrix: &mut dyn core::ToOutputArray, trans_vect: &mut dyn core::ToOutputArray, rot_matrix_x: &mut dyn core::ToOutputArray, rot_matrix_y: &mut dyn core::ToOutputArray, rot_matrix_z: &mut dyn core::ToOutputArray, euler_angles: &mut dyn core::ToOutputArray) -> Result<()> {
input_array_arg!(proj_matrix);
output_array_arg!(camera_matrix);
output_array_arg!(rot_matrix);
output_array_arg!(trans_vect);
output_array_arg!(rot_matrix_x);
output_array_arg!(rot_matrix_y);
output_array_arg!(rot_matrix_z);
output_array_arg!(euler_angles);
unsafe { sys::cv_decomposeProjectionMatrix__InputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray(proj_matrix.as_raw__InputArray(), camera_matrix.as_raw__OutputArray(), rot_matrix.as_raw__OutputArray(), trans_vect.as_raw__OutputArray(), rot_matrix_x.as_raw__OutputArray(), rot_matrix_y.as_raw__OutputArray(), rot_matrix_z.as_raw__OutputArray(), euler_angles.as_raw__OutputArray()) }.into_result()
}
/// Renders the detected chessboard corners.
///
/// ## Parameters
/// * image: Destination image. It must be an 8-bit color image.
/// * patternSize: Number of inner corners per a chessboard row and column
/// (patternSize = cv::Size(points_per_row,points_per_column)).
/// * corners: Array of detected corners, the output of findChessboardCorners.
/// * patternWasFound: Parameter indicating whether the complete board was found or not. The
/// return value of findChessboardCorners should be passed here.
///
/// The function draws individual chessboard corners detected either as red circles if the board was not
/// found, or as colored corners connected with lines if the board was found.
pub fn draw_chessboard_corners(image: &mut dyn core::ToInputOutputArray, pattern_size: core::Size, corners: &dyn core::ToInputArray, pattern_was_found: bool) -> Result<()> {
input_output_array_arg!(image);
input_array_arg!(corners);
unsafe { sys::cv_drawChessboardCorners__InputOutputArray_Size__InputArray_bool(image.as_raw__InputOutputArray(), pattern_size, corners.as_raw__InputArray(), pattern_was_found) }.into_result()
}
/// Computes an optimal affine transformation between two 2D point sets.
///
/// ## Parameters
/// * from: First input 2D point set.
/// * to: Second input 2D point set.
/// * inliers: Output vector indicating which points are inliers.
/// * method: Robust method used to compute tranformation. The following methods are possible:
/// * cv::RANSAC - RANSAC-based robust method
/// * cv::LMEDS - Least-Median robust method
/// RANSAC is the default method.
/// * ransacReprojThreshold: Maximum reprojection error in the RANSAC algorithm to consider
/// a point as an inlier. Applies only to RANSAC.
/// * maxIters: The maximum number of robust method iterations, 2000 is the maximum it can be.
/// * confidence: Confidence level, between 0 and 1, for the estimated transformation. Anything
/// between 0.95 and 0.99 is usually good enough. Values too close to 1 can slow down the estimation
/// significantly. Values lower than 0.8-0.9 can result in an incorrectly estimated transformation.
/// * refineIters: Maximum number of iterations of refining algorithm (Levenberg-Marquardt).
/// Passing 0 will disable refining, so the output matrix will be output of robust method.
///
/// ## Returns
/// Output 2D affine transformation matrix  or empty matrix if transformation
/// could not be estimated.
///
/// The function estimates an optimal 2D affine transformation between two 2D point sets using the
/// selected robust algorithm.
///
/// The computed transformation is then refined further (using only inliers) with the
/// Levenberg-Marquardt method to reduce the re-projection error even more.
///
///
/// Note:
/// The RANSAC method can handle practically any ratio of outliers but need a threshold to
/// distinguish inliers from outliers. The method LMeDS does not need any threshold but it works
/// correctly only when there are more than 50% of inliers.
///
/// ## See also
/// estimateAffinePartial2D, getAffineTransform
///
/// ## C++ default parameters
/// * inliers: noArray()
/// * method: RANSAC
/// * ransac_reproj_threshold: 3
/// * max_iters: 2000
/// * confidence: 0.99
/// * refine_iters: 10
pub fn estimate_affine_2d(from: &dyn core::ToInputArray, to: &dyn core::ToInputArray, inliers: &mut dyn core::ToOutputArray, method: i32, ransac_reproj_threshold: f64, max_iters: size_t, confidence: f64, refine_iters: size_t) -> Result<core::Mat> {
input_array_arg!(from);
input_array_arg!(to);
output_array_arg!(inliers);
unsafe { sys::cv_estimateAffine2D__InputArray__InputArray__OutputArray_int_double_size_t_double_size_t(from.as_raw__InputArray(), to.as_raw__InputArray(), inliers.as_raw__OutputArray(), method, ransac_reproj_threshold, max_iters, confidence, refine_iters) }.into_result().map(|ptr| core::Mat { ptr })
}
/// Computes an optimal affine transformation between two 3D point sets.
///
/// ## Parameters
/// * src: First input 3D point set.
/// * dst: Second input 3D point set.
/// * out: Output 3D affine transformation matrix  .
/// * inliers: Output vector indicating which points are inliers.
/// * ransacThreshold: Maximum reprojection error in the RANSAC algorithm to consider a point as
/// an inlier.
/// * confidence: Confidence level, between 0 and 1, for the estimated transformation. Anything
/// between 0.95 and 0.99 is usually good enough. Values too close to 1 can slow down the estimation
/// significantly. Values lower than 0.8-0.9 can result in an incorrectly estimated transformation.
///
/// The function estimates an optimal 3D affine transformation between two 3D point sets using the
/// RANSAC algorithm.
///
/// ## C++ default parameters
/// * ransac_threshold: 3
/// * confidence: 0.99
pub fn estimate_affine_3d(src: &dyn core::ToInputArray, dst: &dyn core::ToInputArray, out: &mut dyn core::ToOutputArray, inliers: &mut dyn core::ToOutputArray, ransac_threshold: f64, confidence: f64) -> Result<i32> {
input_array_arg!(src);
input_array_arg!(dst);
output_array_arg!(out);
output_array_arg!(inliers);
unsafe { sys::cv_estimateAffine3D__InputArray__InputArray__OutputArray__OutputArray_double_double(src.as_raw__InputArray(), dst.as_raw__InputArray(), out.as_raw__OutputArray(), inliers.as_raw__OutputArray(), ransac_threshold, confidence) }.into_result()
}
/// Computes an optimal limited affine transformation with 4 degrees of freedom between
/// two 2D point sets.
///
/// ## Parameters
/// * from: First input 2D point set.
/// * to: Second input 2D point set.
/// * inliers: Output vector indicating which points are inliers.
/// * method: Robust method used to compute tranformation. The following methods are possible:
/// * cv::RANSAC - RANSAC-based robust method
/// * cv::LMEDS - Least-Median robust method
/// RANSAC is the default method.
/// * ransacReprojThreshold: Maximum reprojection error in the RANSAC algorithm to consider
/// a point as an inlier. Applies only to RANSAC.
/// * maxIters: The maximum number of robust method iterations, 2000 is the maximum it can be.
/// * confidence: Confidence level, between 0 and 1, for the estimated transformation. Anything
/// between 0.95 and 0.99 is usually good enough. Values too close to 1 can slow down the estimation
/// significantly. Values lower than 0.8-0.9 can result in an incorrectly estimated transformation.
/// * refineIters: Maximum number of iterations of refining algorithm (Levenberg-Marquardt).
/// Passing 0 will disable refining, so the output matrix will be output of robust method.
///
/// ## Returns
/// Output 2D affine transformation (4 degrees of freedom) matrix  or
/// empty matrix if transformation could not be estimated.
///
/// The function estimates an optimal 2D affine transformation with 4 degrees of freedom limited to
/// combinations of translation, rotation, and uniform scaling. Uses the selected algorithm for robust
/// estimation.
///
/// The computed transformation is then refined further (using only inliers) with the
/// Levenberg-Marquardt method to reduce the re-projection error even more.
///
/// Estimated transformation matrix is:
/// 
/// Where  is the rotation angle,  the scaling factor and  are
/// translations in  axes respectively.
///
///
/// Note:
/// The RANSAC method can handle practically any ratio of outliers but need a threshold to
/// distinguish inliers from outliers. The method LMeDS does not need any threshold but it works
/// correctly only when there are more than 50% of inliers.
///
/// ## See also
/// estimateAffine2D, getAffineTransform
///
/// ## C++ default parameters
/// * inliers: noArray()
/// * method: RANSAC
/// * ransac_reproj_threshold: 3
/// * max_iters: 2000
/// * confidence: 0.99
/// * refine_iters: 10
pub fn estimate_affine_partial_2d(from: &dyn core::ToInputArray, to: &dyn core::ToInputArray, inliers: &mut dyn core::ToOutputArray, method: i32, ransac_reproj_threshold: f64, max_iters: size_t, confidence: f64, refine_iters: size_t) -> Result<core::Mat> {
input_array_arg!(from);
input_array_arg!(to);
output_array_arg!(inliers);
unsafe { sys::cv_estimateAffinePartial2D__InputArray__InputArray__OutputArray_int_double_size_t_double_size_t(from.as_raw__InputArray(), to.as_raw__InputArray(), inliers.as_raw__OutputArray(), method, ransac_reproj_threshold, max_iters, confidence, refine_iters) }.into_result().map(|ptr| core::Mat { ptr })
}
/// Filters off small noise blobs (speckles) in the disparity map
///
/// ## Parameters
/// * img: The input 16-bit signed disparity image
/// * newVal: The disparity value used to paint-off the speckles
/// * maxSpeckleSize: The maximum speckle size to consider it a speckle. Larger blobs are not
/// affected by the algorithm
/// * maxDiff: Maximum difference between neighbor disparity pixels to put them into the same
/// blob. Note that since StereoBM, StereoSGBM and may be other algorithms return a fixed-point
/// disparity map, where disparity values are multiplied by 16, this scale factor should be taken into
/// account when specifying this parameter value.
/// * buf: The optional temporary buffer to avoid memory allocation within the function.
///
/// ## C++ default parameters
/// * buf: noArray()
pub fn filter_speckles(img: &mut dyn core::ToInputOutputArray, new_val: f64, max_speckle_size: i32, max_diff: f64, buf: &mut dyn core::ToInputOutputArray) -> Result<()> {
input_output_array_arg!(img);
input_output_array_arg!(buf);
unsafe { sys::cv_filterSpeckles__InputOutputArray_double_int_double__InputOutputArray(img.as_raw__InputOutputArray(), new_val, max_speckle_size, max_diff, buf.as_raw__InputOutputArray()) }.into_result()
}
/// finds subpixel-accurate positions of the chessboard corners
pub fn find4_quad_corner_subpix(img: &dyn core::ToInputArray, corners: &mut dyn core::ToInputOutputArray, region_size: core::Size) -> Result<bool> {
input_array_arg!(img);
input_output_array_arg!(corners);
unsafe { sys::cv_find4QuadCornerSubpix__InputArray__InputOutputArray_Size(img.as_raw__InputArray(), corners.as_raw__InputOutputArray(), region_size) }.into_result()
}
/// Finds the positions of internal corners of the chessboard.
///
/// ## Parameters
/// * image: Source chessboard view. It must be an 8-bit grayscale or color image.
/// * patternSize: Number of inner corners per a chessboard row and column
/// ( patternSize = cvSize(points_per_row,points_per_colum) = cvSize(columns,rows) ).
/// * corners: Output array of detected corners.
/// * flags: Various operation flags that can be zero or a combination of the following values:
/// * **CV_CALIB_CB_ADAPTIVE_THRESH** Use adaptive thresholding to convert the image to black
/// and white, rather than a fixed threshold level (computed from the average image brightness).
/// * **CV_CALIB_CB_NORMALIZE_IMAGE** Normalize the image gamma with equalizeHist before
/// applying fixed or adaptive thresholding.
/// * **CV_CALIB_CB_FILTER_QUADS** Use additional criteria (like contour area, perimeter,
/// square-like shape) to filter out false quads extracted at the contour retrieval stage.
/// * **CALIB_CB_FAST_CHECK** Run a fast check on the image that looks for chessboard corners,
/// and shortcut the call if none is found. This can drastically speed up the call in the
/// degenerate condition when no chessboard is observed.
///
/// The function attempts to determine whether the input image is a view of the chessboard pattern and
/// locate the internal chessboard corners. The function returns a non-zero value if all of the corners
/// are found and they are placed in a certain order (row by row, left to right in every row).
/// Otherwise, if the function fails to find all the corners or reorder them, it returns 0. For example,
/// a regular chessboard has 8 x 8 squares and 7 x 7 internal corners, that is, points where the black
/// squares touch each other. The detected coordinates are approximate, and to determine their positions
/// more accurately, the function calls cornerSubPix. You also may use the function cornerSubPix with
/// different parameters if returned coordinates are not accurate enough.
///
/// Sample usage of detecting and drawing chessboard corners: :
/// ```ignore
/// Size patternsize(8,6); //interior number of corners
/// Mat gray = ....; //source image
/// vector<Point2f> corners; //this will be filled by the detected corners
///
/// //CALIB_CB_FAST_CHECK saves a lot of time on images
/// //that do not contain any chessboard corners
/// bool patternfound = findChessboardCorners(gray, patternsize, corners,
/// CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE
/// + CALIB_CB_FAST_CHECK);
///
/// if(patternfound)
/// cornerSubPix(gray, corners, Size(11, 11), Size(-1, -1),
/// TermCriteria(CV_TERMCRIT_EPS + CV_TERMCRIT_ITER, 30, 0.1));
///
/// drawChessboardCorners(img, patternsize, Mat(corners), patternfound);
/// ```
///
///
/// Note: The function requires white space (like a square-thick border, the wider the better) around
/// the board to make the detection more robust in various environments. Otherwise, if there is no
/// border and the background is dark, the outer black squares cannot be segmented properly and so the
/// square grouping and ordering algorithm fails.
///
/// ## C++ default parameters
/// * flags: CALIB_CB_ADAPTIVE_THRESH + CALIB_CB_NORMALIZE_IMAGE
pub fn find_chessboard_corners(image: &dyn core::ToInputArray, pattern_size: core::Size, corners: &mut dyn core::ToOutputArray, flags: i32) -> Result<bool> {
input_array_arg!(image);
output_array_arg!(corners);
unsafe { sys::cv_findChessboardCorners__InputArray_Size__OutputArray_int(image.as_raw__InputArray(), pattern_size, corners.as_raw__OutputArray(), flags) }.into_result()
}
/// Finds centers in the grid of circles.
///
/// ## Parameters
/// * image: grid view of input circles; it must be an 8-bit grayscale or color image.
/// * patternSize: number of circles per row and column
/// ( patternSize = Size(points_per_row, points_per_colum) ).
/// * centers: output array of detected centers.
/// * flags: various operation flags that can be one of the following values:
/// * **CALIB_CB_SYMMETRIC_GRID** uses symmetric pattern of circles.
/// * **CALIB_CB_ASYMMETRIC_GRID** uses asymmetric pattern of circles.
/// * **CALIB_CB_CLUSTERING** uses a special algorithm for grid detection. It is more robust to
/// perspective distortions but much more sensitive to background clutter.
/// * blobDetector: feature detector that finds blobs like dark circles on light background.
///
/// The function attempts to determine whether the input image contains a grid of circles. If it is, the
/// function locates centers of the circles. The function returns a non-zero value if all of the centers
/// have been found and they have been placed in a certain order (row by row, left to right in every
/// row). Otherwise, if the function fails to find all the corners or reorder them, it returns 0.
///
/// Sample usage of detecting and drawing the centers of circles: :
/// ```ignore
/// Size patternsize(7,7); //number of centers
/// Mat gray = ....; //source image
/// vector<Point2f> centers; //this will be filled by the detected centers
///
/// bool patternfound = findCirclesGrid(gray, patternsize, centers);
///
/// drawChessboardCorners(img, patternsize, Mat(centers), patternfound);
/// ```
///
///
/// Note: The function requires white space (like a square-thick border, the wider the better) around
/// the board to make the detection more robust in various environments.
///
/// ## C++ default parameters
/// * flags: CALIB_CB_SYMMETRIC_GRID
/// * blob_detector: SimpleBlobDetector::create()
pub fn find_circles_grid(image: &dyn core::ToInputArray, pattern_size: core::Size, centers: &mut dyn core::ToOutputArray, flags: i32, blob_detector: &types::PtrOfFeature2D) -> Result<bool> {
input_array_arg!(image);
output_array_arg!(centers);
unsafe { sys::cv_findCirclesGrid__InputArray_Size__OutputArray_int_PtrOfFeature2D(image.as_raw__InputArray(), pattern_size, centers.as_raw__OutputArray(), flags, blob_detector.as_raw_PtrOfFeature2D()) }.into_result()
}
/// Calculates an essential matrix from the corresponding points in two images.
///
/// ## Parameters
/// * points1: Array of N (N \>= 5) 2D points from the first image. The point coordinates should
/// be floating-point (single or double precision).
/// * points2: Array of the second image points of the same size and format as points1 .
/// * cameraMatrix: Camera matrix  .
/// Note that this function assumes that points1 and points2 are feature points from cameras with the
/// same camera matrix.
/// * method: Method for computing a fundamental matrix.
/// * **RANSAC** for the RANSAC algorithm.
/// * **MEDS** for the LMedS algorithm.
/// * prob: Parameter used for the RANSAC or LMedS methods only. It specifies a desirable level of
/// confidence (probability) that the estimated matrix is correct.
/// * threshold: Parameter used for RANSAC. It is the maximum distance from a point to an epipolar
/// line in pixels, beyond which the point is considered an outlier and is not used for computing the
/// final fundamental matrix. It can be set to something like 1-3, depending on the accuracy of the
/// point localization, image resolution, and the image noise.
/// * mask: Output array of N elements, every element of which is set to 0 for outliers and to 1
/// for the other points. The array is computed only in the RANSAC and LMedS methods.
///
/// This function estimates essential matrix based on the five-point algorithm solver in [Nister03](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_Nister03) .
/// [SteweniusCFS](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_SteweniusCFS) is also a related. The epipolar geometry is described by the following equation:
///
/// 
///
/// where  is an essential matrix,  and  are corresponding points in the first and the
/// second images, respectively. The result of this function may be passed further to
/// decomposeEssentialMat or recoverPose to recover the relative pose between cameras.
///
/// ## C++ default parameters
/// * method: RANSAC
/// * prob: 0.999
/// * threshold: 1.0
/// * mask: noArray()
pub fn find_essential_mat_matrix(points1: &dyn core::ToInputArray, points2: &dyn core::ToInputArray, camera_matrix: &dyn core::ToInputArray, method: i32, prob: f64, threshold: f64, mask: &mut dyn core::ToOutputArray) -> Result<core::Mat> {
input_array_arg!(points1);
input_array_arg!(points2);
input_array_arg!(camera_matrix);
output_array_arg!(mask);
unsafe { sys::cv_findEssentialMat__InputArray__InputArray__InputArray_int_double_double__OutputArray(points1.as_raw__InputArray(), points2.as_raw__InputArray(), camera_matrix.as_raw__InputArray(), method, prob, threshold, mask.as_raw__OutputArray()) }.into_result().map(|ptr| core::Mat { ptr })
}
/// Calculates an essential matrix from the corresponding points in two images.
///
/// ## Parameters
/// * points1: Array of N (N \>= 5) 2D points from the first image. The point coordinates should
/// be floating-point (single or double precision).
/// * points2: Array of the second image points of the same size and format as points1 .
/// * cameraMatrix: Camera matrix  .
/// Note that this function assumes that points1 and points2 are feature points from cameras with the
/// same camera matrix.
/// * method: Method for computing a fundamental matrix.
/// * **RANSAC** for the RANSAC algorithm.
/// * **MEDS** for the LMedS algorithm.
/// * prob: Parameter used for the RANSAC or LMedS methods only. It specifies a desirable level of
/// confidence (probability) that the estimated matrix is correct.
/// * threshold: Parameter used for RANSAC. It is the maximum distance from a point to an epipolar
/// line in pixels, beyond which the point is considered an outlier and is not used for computing the
/// final fundamental matrix. It can be set to something like 1-3, depending on the accuracy of the
/// point localization, image resolution, and the image noise.
/// * mask: Output array of N elements, every element of which is set to 0 for outliers and to 1
/// for the other points. The array is computed only in the RANSAC and LMedS methods.
///
/// This function estimates essential matrix based on the five-point algorithm solver in [Nister03](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_Nister03) .
/// [SteweniusCFS](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_SteweniusCFS) is also a related. The epipolar geometry is described by the following equation:
///
/// 
///
/// where  is an essential matrix,  and  are corresponding points in the first and the
/// second images, respectively. The result of this function may be passed further to
/// decomposeEssentialMat or recoverPose to recover the relative pose between cameras.
///
/// ## Overloaded parameters
///
/// * points1: Array of N (N \>= 5) 2D points from the first image. The point coordinates should
/// be floating-point (single or double precision).
/// * points2: Array of the second image points of the same size and format as points1 .
/// * focal: focal length of the camera. Note that this function assumes that points1 and points2
/// are feature points from cameras with same focal length and principal point.
/// * pp: principal point of the camera.
/// * method: Method for computing a fundamental matrix.
/// * **RANSAC** for the RANSAC algorithm.
/// * **LMEDS** for the LMedS algorithm.
/// * threshold: Parameter used for RANSAC. It is the maximum distance from a point to an epipolar
/// line in pixels, beyond which the point is considered an outlier and is not used for computing the
/// final fundamental matrix. It can be set to something like 1-3, depending on the accuracy of the
/// point localization, image resolution, and the image noise.
/// * prob: Parameter used for the RANSAC or LMedS methods only. It specifies a desirable level of
/// confidence (probability) that the estimated matrix is correct.
/// * mask: Output array of N elements, every element of which is set to 0 for outliers and to 1
/// for the other points. The array is computed only in the RANSAC and LMedS methods.
///
/// This function differs from the one above that it computes camera matrix from focal length and
/// principal point:
///
/// 
///
/// ## C++ default parameters
/// * focal: 1.0
/// * pp: Point2d(0, 0)
/// * method: RANSAC
/// * prob: 0.999
/// * threshold: 1.0
/// * mask: noArray()
pub fn find_essential_mat(points1: &dyn core::ToInputArray, points2: &dyn core::ToInputArray, focal: f64, pp: core::Point2d, method: i32, prob: f64, threshold: f64, mask: &mut dyn core::ToOutputArray) -> Result<core::Mat> {
input_array_arg!(points1);
input_array_arg!(points2);
output_array_arg!(mask);
unsafe { sys::cv_findEssentialMat__InputArray__InputArray_double_Point2d_int_double_double__OutputArray(points1.as_raw__InputArray(), points2.as_raw__InputArray(), focal, pp, method, prob, threshold, mask.as_raw__OutputArray()) }.into_result().map(|ptr| core::Mat { ptr })
}
/// Calculates a fundamental matrix from the corresponding points in two images.
///
/// ## Parameters
/// * points1: Array of N points from the first image. The point coordinates should be
/// floating-point (single or double precision).
/// * points2: Array of the second image points of the same size and format as points1 .
/// * method: Method for computing a fundamental matrix.
/// * **CV_FM_7POINT** for a 7-point algorithm. 
/// * **CV_FM_8POINT** for an 8-point algorithm. 
/// * **CV_FM_RANSAC** for the RANSAC algorithm. 
/// * **CV_FM_LMEDS** for the LMedS algorithm. 
/// * param1: Parameter used for RANSAC. It is the maximum distance from a point to an epipolar
/// line in pixels, beyond which the point is considered an outlier and is not used for computing the
/// final fundamental matrix. It can be set to something like 1-3, depending on the accuracy of the
/// point localization, image resolution, and the image noise.
/// * param2: Parameter used for the RANSAC or LMedS methods only. It specifies a desirable level
/// of confidence (probability) that the estimated matrix is correct.
/// * mask:
///
/// The epipolar geometry is described by the following equation:
///
/// 
///
/// where  is a fundamental matrix,  and  are corresponding points in the first and the
/// second images, respectively.
///
/// The function calculates the fundamental matrix using one of four methods listed above and returns
/// the found fundamental matrix. Normally just one matrix is found. But in case of the 7-point
/// algorithm, the function may return up to 3 solutions (  matrix that stores all 3
/// matrices sequentially).
///
/// The calculated fundamental matrix may be passed further to computeCorrespondEpilines that finds the
/// epipolar lines corresponding to the specified points. It can also be passed to
/// stereoRectifyUncalibrated to compute the rectification transformation. :
/// ```ignore
/// // Example. Estimation of fundamental matrix using the RANSAC algorithm
/// int point_count = 100;
/// vector<Point2f> points1(point_count);
/// vector<Point2f> points2(point_count);
///
/// // initialize the points here ...
/// for( int i = 0; i < point_count; i++ )
/// {
/// points1[i] = ...;
/// points2[i] = ...;
/// }
///
/// Mat fundamental_matrix =
/// findFundamentalMat(points1, points2, FM_RANSAC, 3, 0.99);
/// ```
///
///
/// ## Overloaded parameters
///
/// ## C++ default parameters
/// * method: FM_RANSAC
/// * param1: 3.
/// * param2: 0.99
pub fn find_fundamental_mat(points1: &dyn core::ToInputArray, points2: &dyn core::ToInputArray, mask: &mut dyn core::ToOutputArray, method: i32, param1: f64, param2: f64) -> Result<core::Mat> {
input_array_arg!(points1);
input_array_arg!(points2);
output_array_arg!(mask);
unsafe { sys::cv_findFundamentalMat__InputArray__InputArray__OutputArray_int_double_double(points1.as_raw__InputArray(), points2.as_raw__InputArray(), mask.as_raw__OutputArray(), method, param1, param2) }.into_result().map(|ptr| core::Mat { ptr })
}
/// Finds a perspective transformation between two planes.
///
/// ## Parameters
/// * srcPoints: Coordinates of the points in the original plane, a matrix of the type CV_32FC2
/// or vector\<Point2f\> .
/// * dstPoints: Coordinates of the points in the target plane, a matrix of the type CV_32FC2 or
/// a vector\<Point2f\> .
/// * method: Method used to computed a homography matrix. The following methods are possible:
/// * **0** - a regular method using all the points
/// * **RANSAC** - RANSAC-based robust method
/// * **LMEDS** - Least-Median robust method
/// * **RHO** - PROSAC-based robust method
/// * ransacReprojThreshold: Maximum allowed reprojection error to treat a point pair as an inlier
/// (used in the RANSAC and RHO methods only). That is, if
/// 
/// then the point  is considered an outlier. If srcPoints and dstPoints are measured in pixels,
/// it usually makes sense to set this parameter somewhere in the range of 1 to 10.
/// * mask: Optional output mask set by a robust method ( RANSAC or LMEDS ). Note that the input
/// mask values are ignored.
/// * maxIters: The maximum number of RANSAC iterations, 2000 is the maximum it can be.
/// * confidence: Confidence level, between 0 and 1.
///
/// The function finds and returns the perspective transformation  between the source and the
/// destination planes:
///
/// 
///
/// so that the back-projection error
///
/// 
///
/// is minimized. If the parameter method is set to the default value 0, the function uses all the point
/// pairs to compute an initial homography estimate with a simple least-squares scheme.
///
/// However, if not all of the point pairs ( ,  ) fit the rigid perspective
/// transformation (that is, there are some outliers), this initial estimate will be poor. In this case,
/// you can use one of the three robust methods. The methods RANSAC, LMeDS and RHO try many different
/// random subsets of the corresponding point pairs (of four pairs each), estimate the homography matrix
/// using this subset and a simple least-square algorithm, and then compute the quality/goodness of the
/// computed homography (which is the number of inliers for RANSAC or the median re-projection error for
/// LMeDs). The best subset is then used to produce the initial estimate of the homography matrix and
/// the mask of inliers/outliers.
///
/// Regardless of the method, robust or not, the computed homography matrix is refined further (using
/// inliers only in case of a robust method) with the Levenberg-Marquardt method to reduce the
/// re-projection error even more.
///
/// The methods RANSAC and RHO can handle practically any ratio of outliers but need a threshold to
/// distinguish inliers from outliers. The method LMeDS does not need any threshold but it works
/// correctly only when there are more than 50% of inliers. Finally, if there are no outliers and the
/// noise is rather small, use the default method (method=0).
///
/// The function is used to find initial intrinsic and extrinsic matrices. Homography matrix is
/// determined up to a scale. Thus, it is normalized so that . Note that whenever an H matrix
/// cannot be estimated, an empty one will be returned.
///
/// ## See also
/// getAffineTransform, estimateAffine2D, estimateAffinePartial2D, getPerspectiveTransform, warpPerspective,
/// perspectiveTransform
///
///
///
/// Note:
/// * A example on calculating a homography for image matching can be found at
/// opencv_source_code/samples/cpp/video_homography.cpp
///
/// ## Overloaded parameters
///
/// ## C++ default parameters
/// * method: 0
/// * ransac_reproj_threshold: 3
pub fn find_homography(src_points: &dyn core::ToInputArray, dst_points: &dyn core::ToInputArray, mask: &mut dyn core::ToOutputArray, method: i32, ransac_reproj_threshold: f64) -> Result<core::Mat> {
input_array_arg!(src_points);
input_array_arg!(dst_points);
output_array_arg!(mask);
unsafe { sys::cv_findHomography__InputArray__InputArray__OutputArray_int_double(src_points.as_raw__InputArray(), dst_points.as_raw__InputArray(), mask.as_raw__OutputArray(), method, ransac_reproj_threshold) }.into_result().map(|ptr| core::Mat { ptr })
}
/// Finds a perspective transformation between two planes.
///
/// ## Parameters
/// * srcPoints: Coordinates of the points in the original plane, a matrix of the type CV_32FC2
/// or vector\<Point2f\> .
/// * dstPoints: Coordinates of the points in the target plane, a matrix of the type CV_32FC2 or
/// a vector\<Point2f\> .
/// * method: Method used to computed a homography matrix. The following methods are possible:
/// * **0** - a regular method using all the points
/// * **RANSAC** - RANSAC-based robust method
/// * **LMEDS** - Least-Median robust method
/// * **RHO** - PROSAC-based robust method
/// * ransacReprojThreshold: Maximum allowed reprojection error to treat a point pair as an inlier
/// (used in the RANSAC and RHO methods only). That is, if
/// 
/// then the point  is considered an outlier. If srcPoints and dstPoints are measured in pixels,
/// it usually makes sense to set this parameter somewhere in the range of 1 to 10.
/// * mask: Optional output mask set by a robust method ( RANSAC or LMEDS ). Note that the input
/// mask values are ignored.
/// * maxIters: The maximum number of RANSAC iterations, 2000 is the maximum it can be.
/// * confidence: Confidence level, between 0 and 1.
///
/// The function finds and returns the perspective transformation  between the source and the
/// destination planes:
///
/// 
///
/// so that the back-projection error
///
/// 
///
/// is minimized. If the parameter method is set to the default value 0, the function uses all the point
/// pairs to compute an initial homography estimate with a simple least-squares scheme.
///
/// However, if not all of the point pairs ( ,  ) fit the rigid perspective
/// transformation (that is, there are some outliers), this initial estimate will be poor. In this case,
/// you can use one of the three robust methods. The methods RANSAC, LMeDS and RHO try many different
/// random subsets of the corresponding point pairs (of four pairs each), estimate the homography matrix
/// using this subset and a simple least-square algorithm, and then compute the quality/goodness of the
/// computed homography (which is the number of inliers for RANSAC or the median re-projection error for
/// LMeDs). The best subset is then used to produce the initial estimate of the homography matrix and
/// the mask of inliers/outliers.
///
/// Regardless of the method, robust or not, the computed homography matrix is refined further (using
/// inliers only in case of a robust method) with the Levenberg-Marquardt method to reduce the
/// re-projection error even more.
///
/// The methods RANSAC and RHO can handle practically any ratio of outliers but need a threshold to
/// distinguish inliers from outliers. The method LMeDS does not need any threshold but it works
/// correctly only when there are more than 50% of inliers. Finally, if there are no outliers and the
/// noise is rather small, use the default method (method=0).
///
/// The function is used to find initial intrinsic and extrinsic matrices. Homography matrix is
/// determined up to a scale. Thus, it is normalized so that . Note that whenever an H matrix
/// cannot be estimated, an empty one will be returned.
///
/// ## See also
/// getAffineTransform, estimateAffine2D, estimateAffinePartial2D, getPerspectiveTransform, warpPerspective,
/// perspectiveTransform
///
///
///
/// Note:
/// * A example on calculating a homography for image matching can be found at
/// opencv_source_code/samples/cpp/video_homography.cpp
///
/// ## C++ default parameters
/// * method: 0
/// * ransac_reproj_threshold: 3
/// * mask: noArray()
/// * max_iters: 2000
/// * confidence: 0.995
pub fn find_homography_ext(src_points: &dyn core::ToInputArray, dst_points: &dyn core::ToInputArray, method: i32, ransac_reproj_threshold: f64, mask: &mut dyn core::ToOutputArray, max_iters: i32, confidence: f64) -> Result<core::Mat> {
input_array_arg!(src_points);
input_array_arg!(dst_points);
output_array_arg!(mask);
unsafe { sys::cv_findHomography__InputArray__InputArray_int_double__OutputArray_int_double(src_points.as_raw__InputArray(), dst_points.as_raw__InputArray(), method, ransac_reproj_threshold, mask.as_raw__OutputArray(), max_iters, confidence) }.into_result().map(|ptr| core::Mat { ptr })
}
/// Performs camera calibaration
///
/// ## Parameters
/// * objectPoints: vector of vectors of calibration pattern points in the calibration pattern
/// coordinate space.
/// * imagePoints: vector of vectors of the projections of calibration pattern points.
/// imagePoints.size() and objectPoints.size() and imagePoints[i].size() must be equal to
/// objectPoints[i].size() for each i.
/// * image_size: Size of the image used only to initialize the intrinsic camera matrix.
/// * K: Output 3x3 floating-point camera matrix
///  . If
/// fisheye::CALIB_USE_INTRINSIC_GUESS/ is specified, some or all of fx, fy, cx, cy must be
/// initialized before calling the function.
/// * D: Output vector of distortion coefficients .
/// * rvecs: Output vector of rotation vectors (see Rodrigues ) estimated for each pattern view.
/// That is, each k-th rotation vector together with the corresponding k-th translation vector (see
/// the next output parameter description) brings the calibration pattern from the model coordinate
/// space (in which object points are specified) to the world coordinate space, that is, a real
/// position of the calibration pattern in the k-th pattern view (k=0.. *M* -1).
/// * tvecs: Output vector of translation vectors estimated for each pattern view.
/// * flags: Different flags that may be zero or a combination of the following values:
/// * **fisheye::CALIB_USE_INTRINSIC_GUESS** cameraMatrix contains valid initial values of
/// fx, fy, cx, cy that are optimized further. Otherwise, (cx, cy) is initially set to the image
/// center ( imageSize is used), and focal distances are computed in a least-squares fashion.
/// * **fisheye::CALIB_RECOMPUTE_EXTRINSIC** Extrinsic will be recomputed after each iteration
/// of intrinsic optimization.
/// * **fisheye::CALIB_CHECK_COND** The functions will check validity of condition number.
/// * **fisheye::CALIB_FIX_SKEW** Skew coefficient (alpha) is set to zero and stay zero.
/// * **fisheye::CALIB_FIX_K1..fisheye::CALIB_FIX_K4** Selected distortion coefficients
/// are set to zeros and stay zero.
/// * **fisheye::CALIB_FIX_PRINCIPAL_POINT** The principal point is not changed during the global
/// optimization. It stays at the center or at a different location specified when CALIB_USE_INTRINSIC_GUESS is set too.
/// * criteria: Termination criteria for the iterative optimization algorithm.
///
/// ## C++ default parameters
/// * flags: 0
/// * criteria: TermCriteria(TermCriteria::COUNT + TermCriteria::EPS, 100, DBL_EPSILON)
pub fn calibrate(object_points: &dyn core::ToInputArray, image_points: &dyn core::ToInputArray, image_size: core::Size, k: &mut dyn core::ToInputOutputArray, d: &mut dyn core::ToInputOutputArray, rvecs: &mut dyn core::ToOutputArray, tvecs: &mut dyn core::ToOutputArray, flags: i32, criteria: &core::TermCriteria) -> Result<f64> {
input_array_arg!(object_points);
input_array_arg!(image_points);
input_output_array_arg!(k);
input_output_array_arg!(d);
output_array_arg!(rvecs);
output_array_arg!(tvecs);
unsafe { sys::cv_fisheye_calibrate__InputArray__InputArray_Size__InputOutputArray__InputOutputArray__OutputArray__OutputArray_int_TermCriteria(object_points.as_raw__InputArray(), image_points.as_raw__InputArray(), image_size, k.as_raw__InputOutputArray(), d.as_raw__InputOutputArray(), rvecs.as_raw__OutputArray(), tvecs.as_raw__OutputArray(), flags, criteria.as_raw_TermCriteria()) }.into_result()
}
/// Distorts 2D points using fisheye model.
///
/// ## Parameters
/// * undistorted: Array of object points, 1xN/Nx1 2-channel (or vector\<Point2f\> ), where N is
/// the number of points in the view.
/// * K: Camera matrix .
/// * D: Input vector of distortion coefficients .
/// * alpha: The skew coefficient.
/// * distorted: Output array of image points, 1xN/Nx1 2-channel, or vector\<Point2f\> .
///
/// Note that the function assumes the camera matrix of the undistorted points to be indentity.
/// This means if you want to transform back points undistorted with undistortPoints() you have to
/// multiply them with .
///
/// ## C++ default parameters
/// * alpha: 0
pub fn distort_points(undistorted: &dyn core::ToInputArray, distorted: &mut dyn core::ToOutputArray, k: &dyn core::ToInputArray, d: &dyn core::ToInputArray, alpha: f64) -> Result<()> {
input_array_arg!(undistorted);
output_array_arg!(distorted);
input_array_arg!(k);
input_array_arg!(d);
unsafe { sys::cv_fisheye_distortPoints__InputArray__OutputArray__InputArray__InputArray_double(undistorted.as_raw__InputArray(), distorted.as_raw__OutputArray(), k.as_raw__InputArray(), d.as_raw__InputArray(), alpha) }.into_result()
}
/// Estimates new camera matrix for undistortion or rectification.
///
/// ## Parameters
/// * K: Camera matrix .
/// * image_size:
/// * D: Input vector of distortion coefficients .
/// * R: Rectification transformation in the object space: 3x3 1-channel, or vector: 3x1/1x3
/// 1-channel or 1x1 3-channel
/// * P: New camera matrix (3x3) or new projection matrix (3x4)
/// * balance: Sets the new focal length in range between the min focal length and the max focal
/// length. Balance is in range of [0, 1].
/// * new_size:
/// * fov_scale: Divisor for new focal length.
///
/// ## C++ default parameters
/// * balance: 0.0
/// * new_size: Size()
/// * fov_scale: 1.0
pub fn estimate_new_camera_matrix_for_undistort_rectify(k: &dyn core::ToInputArray, d: &dyn core::ToInputArray, image_size: core::Size, r: &dyn core::ToInputArray, p: &mut dyn core::ToOutputArray, balance: f64, new_size: core::Size, fov_scale: f64) -> Result<()> {
input_array_arg!(k);
input_array_arg!(d);
input_array_arg!(r);
output_array_arg!(p);
unsafe { sys::cv_fisheye_estimateNewCameraMatrixForUndistortRectify__InputArray__InputArray_Size__InputArray__OutputArray_double_Size_double(k.as_raw__InputArray(), d.as_raw__InputArray(), image_size, r.as_raw__InputArray(), p.as_raw__OutputArray(), balance, new_size, fov_scale) }.into_result()
}
/// Computes undistortion and rectification maps for image transform by cv::remap(). If D is empty zero
/// distortion is used, if R or P is empty identity matrixes are used.
///
/// ## Parameters
/// * K: Camera matrix .
/// * D: Input vector of distortion coefficients .
/// * R: Rectification transformation in the object space: 3x3 1-channel, or vector: 3x1/1x3
/// 1-channel or 1x1 3-channel
/// * P: New camera matrix (3x3) or new projection matrix (3x4)
/// * size: Undistorted image size.
/// * m1type: Type of the first output map that can be CV_32FC1 or CV_16SC2 . See convertMaps()
/// for details.
/// * map1: The first output map.
/// * map2: The second output map.
pub fn fisheye_init_undistort_rectify_map(k: &dyn core::ToInputArray, d: &dyn core::ToInputArray, r: &dyn core::ToInputArray, p: &dyn core::ToInputArray, size: core::Size, m1type: i32, map1: &mut dyn core::ToOutputArray, map2: &mut dyn core::ToOutputArray) -> Result<()> {
input_array_arg!(k);
input_array_arg!(d);
input_array_arg!(r);
input_array_arg!(p);
output_array_arg!(map1);
output_array_arg!(map2);
unsafe { sys::cv_fisheye_initUndistortRectifyMap__InputArray__InputArray__InputArray__InputArray_Size_int__OutputArray__OutputArray(k.as_raw__InputArray(), d.as_raw__InputArray(), r.as_raw__InputArray(), p.as_raw__InputArray(), size, m1type, map1.as_raw__OutputArray(), map2.as_raw__OutputArray()) }.into_result()
}
/// Projects points using fisheye model
///
/// ## Parameters
/// * objectPoints: Array of object points, 1xN/Nx1 3-channel (or vector\<Point3f\> ), where N is
/// the number of points in the view.
/// * imagePoints: Output array of image points, 2xN/Nx2 1-channel or 1xN/Nx1 2-channel, or
/// vector\<Point2f\>.
/// * affine:
/// * K: Camera matrix .
/// * D: Input vector of distortion coefficients .
/// * alpha: The skew coefficient.
/// * jacobian: Optional output 2Nx15 jacobian matrix of derivatives of image points with respect
/// to components of the focal lengths, coordinates of the principal point, distortion coefficients,
/// rotation vector, translation vector, and the skew. In the old interface different components of
/// the jacobian are returned via different output parameters.
///
/// The function computes projections of 3D points to the image plane given intrinsic and extrinsic
/// camera parameters. Optionally, the function computes Jacobians - matrices of partial derivatives of
/// image points coordinates (as functions of all the input parameters) with respect to the particular
/// parameters, intrinsic and/or extrinsic.
///
/// ## Overloaded parameters
///
/// ## C++ default parameters
/// * alpha: 0
/// * jacobian: noArray()
pub fn fisheye_project_points(object_points: &dyn core::ToInputArray, image_points: &mut dyn core::ToOutputArray, rvec: &dyn core::ToInputArray, tvec: &dyn core::ToInputArray, k: &dyn core::ToInputArray, d: &dyn core::ToInputArray, alpha: f64, jacobian: &mut dyn core::ToOutputArray) -> Result<()> {
input_array_arg!(object_points);
output_array_arg!(image_points);
input_array_arg!(rvec);
input_array_arg!(tvec);
input_array_arg!(k);
input_array_arg!(d);
output_array_arg!(jacobian);
unsafe { sys::cv_fisheye_projectPoints__InputArray__OutputArray__InputArray__InputArray__InputArray__InputArray_double__OutputArray(object_points.as_raw__InputArray(), image_points.as_raw__OutputArray(), rvec.as_raw__InputArray(), tvec.as_raw__InputArray(), k.as_raw__InputArray(), d.as_raw__InputArray(), alpha, jacobian.as_raw__OutputArray()) }.into_result()
}
/// Performs stereo calibration
///
/// ## Parameters
/// * objectPoints: Vector of vectors of the calibration pattern points.
/// * imagePoints1: Vector of vectors of the projections of the calibration pattern points,
/// observed by the first camera.
/// * imagePoints2: Vector of vectors of the projections of the calibration pattern points,
/// observed by the second camera.
/// * K1: Input/output first camera matrix:
///  ,  . If
/// any of fisheye::CALIB_USE_INTRINSIC_GUESS , fisheye::CV_CALIB_FIX_INTRINSIC are specified,
/// some or all of the matrix components must be initialized.
/// * D1: Input/output vector of distortion coefficients  of 4 elements.
/// * K2: Input/output second camera matrix. The parameter is similar to K1 .
/// * D2: Input/output lens distortion coefficients for the second camera. The parameter is
/// similar to D1 .
/// * imageSize: Size of the image used only to initialize intrinsic camera matrix.
/// * R: Output rotation matrix between the 1st and the 2nd camera coordinate systems.
/// * T: Output translation vector between the coordinate systems of the cameras.
/// * flags: Different flags that may be zero or a combination of the following values:
/// * **fisheye::CV_CALIB_FIX_INTRINSIC** Fix K1, K2? and D1, D2? so that only R, T matrices
/// are estimated.
/// * **fisheye::CALIB_USE_INTRINSIC_GUESS** K1, K2 contains valid initial values of
/// fx, fy, cx, cy that are optimized further. Otherwise, (cx, cy) is initially set to the image
/// center (imageSize is used), and focal distances are computed in a least-squares fashion.
/// * **fisheye::CALIB_RECOMPUTE_EXTRINSIC** Extrinsic will be recomputed after each iteration
/// of intrinsic optimization.
/// * **fisheye::CALIB_CHECK_COND** The functions will check validity of condition number.
/// * **fisheye::CALIB_FIX_SKEW** Skew coefficient (alpha) is set to zero and stay zero.
/// * **fisheye::CALIB_FIX_K1..4** Selected distortion coefficients are set to zeros and stay
/// zero.
/// * criteria: Termination criteria for the iterative optimization algorithm.
///
/// ## C++ default parameters
/// * flags: fisheye::CALIB_FIX_INTRINSIC
/// * criteria: TermCriteria(TermCriteria::COUNT + TermCriteria::EPS, 100, DBL_EPSILON)
pub fn fisheye_stereo_calibrate(object_points: &dyn core::ToInputArray, image_points1: &dyn core::ToInputArray, image_points2: &dyn core::ToInputArray, k1: &mut dyn core::ToInputOutputArray, d1: &mut dyn core::ToInputOutputArray, k2: &mut dyn core::ToInputOutputArray, d2: &mut dyn core::ToInputOutputArray, image_size: core::Size, r: &mut dyn core::ToOutputArray, t: &mut dyn core::ToOutputArray, flags: i32, criteria: &core::TermCriteria) -> Result<f64> {
input_array_arg!(object_points);
input_array_arg!(image_points1);
input_array_arg!(image_points2);
input_output_array_arg!(k1);
input_output_array_arg!(d1);
input_output_array_arg!(k2);
input_output_array_arg!(d2);
output_array_arg!(r);
output_array_arg!(t);
unsafe { sys::cv_fisheye_stereoCalibrate__InputArray__InputArray__InputArray__InputOutputArray__InputOutputArray__InputOutputArray__InputOutputArray_Size__OutputArray__OutputArray_int_TermCriteria(object_points.as_raw__InputArray(), image_points1.as_raw__InputArray(), image_points2.as_raw__InputArray(), k1.as_raw__InputOutputArray(), d1.as_raw__InputOutputArray(), k2.as_raw__InputOutputArray(), d2.as_raw__InputOutputArray(), image_size, r.as_raw__OutputArray(), t.as_raw__OutputArray(), flags, criteria.as_raw_TermCriteria()) }.into_result()
}
/// Stereo rectification for fisheye camera model
///
/// ## Parameters
/// * K1: First camera matrix.
/// * D1: First camera distortion parameters.
/// * K2: Second camera matrix.
/// * D2: Second camera distortion parameters.
/// * imageSize: Size of the image used for stereo calibration.
/// * R: Rotation matrix between the coordinate systems of the first and the second
/// cameras.
/// * tvec: Translation vector between coordinate systems of the cameras.
/// * R1: Output 3x3 rectification transform (rotation matrix) for the first camera.
/// * R2: Output 3x3 rectification transform (rotation matrix) for the second camera.
/// * P1: Output 3x4 projection matrix in the new (rectified) coordinate systems for the first
/// camera.
/// * P2: Output 3x4 projection matrix in the new (rectified) coordinate systems for the second
/// camera.
/// * Q: Output  disparity-to-depth mapping matrix (see reprojectImageTo3D ).
/// * flags: Operation flags that may be zero or CV_CALIB_ZERO_DISPARITY . If the flag is set,
/// the function makes the principal points of each camera have the same pixel coordinates in the
/// rectified views. And if the flag is not set, the function may still shift the images in the
/// horizontal or vertical direction (depending on the orientation of epipolar lines) to maximize the
/// useful image area.
/// * newImageSize: New image resolution after rectification. The same size should be passed to
/// initUndistortRectifyMap (see the stereo_calib.cpp sample in OpenCV samples directory). When (0,0)
/// is passed (default), it is set to the original imageSize . Setting it to larger value can help you
/// preserve details in the original image, especially when there is a big radial distortion.
/// * balance: Sets the new focal length in range between the min focal length and the max focal
/// length. Balance is in range of [0, 1].
/// * fov_scale: Divisor for new focal length.
///
/// ## C++ default parameters
/// * new_image_size: Size()
/// * balance: 0.0
/// * fov_scale: 1.0
pub fn fisheye_stereo_rectify(k1: &dyn core::ToInputArray, d1: &dyn core::ToInputArray, k2: &dyn core::ToInputArray, d2: &dyn core::ToInputArray, image_size: core::Size, r: &dyn core::ToInputArray, tvec: &dyn core::ToInputArray, r1: &mut dyn core::ToOutputArray, r2: &mut dyn core::ToOutputArray, p1: &mut dyn core::ToOutputArray, p2: &mut dyn core::ToOutputArray, q: &mut dyn core::ToOutputArray, flags: i32, new_image_size: core::Size, balance: f64, fov_scale: f64) -> Result<()> {
input_array_arg!(k1);
input_array_arg!(d1);
input_array_arg!(k2);
input_array_arg!(d2);
input_array_arg!(r);
input_array_arg!(tvec);
output_array_arg!(r1);
output_array_arg!(r2);
output_array_arg!(p1);
output_array_arg!(p2);
output_array_arg!(q);
unsafe { sys::cv_fisheye_stereoRectify__InputArray__InputArray__InputArray__InputArray_Size__InputArray__InputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray_int_Size_double_double(k1.as_raw__InputArray(), d1.as_raw__InputArray(), k2.as_raw__InputArray(), d2.as_raw__InputArray(), image_size, r.as_raw__InputArray(), tvec.as_raw__InputArray(), r1.as_raw__OutputArray(), r2.as_raw__OutputArray(), p1.as_raw__OutputArray(), p2.as_raw__OutputArray(), q.as_raw__OutputArray(), flags, new_image_size, balance, fov_scale) }.into_result()
}
/// Transforms an image to compensate for fisheye lens distortion.
///
/// ## Parameters
/// * distorted: image with fisheye lens distortion.
/// * undistorted: Output image with compensated fisheye lens distortion.
/// * K: Camera matrix .
/// * D: Input vector of distortion coefficients .
/// * Knew: Camera matrix of the distorted image. By default, it is the identity matrix but you
/// may additionally scale and shift the result by using a different matrix.
/// * new_size:
///
/// The function transforms an image to compensate radial and tangential lens distortion.
///
/// The function is simply a combination of fisheye::initUndistortRectifyMap (with unity R ) and remap
/// (with bilinear interpolation). See the former function for details of the transformation being
/// performed.
///
/// See below the results of undistortImage.
/// * a\) result of undistort of perspective camera model (all possible coefficients (k_1, k_2, k_3,
/// k_4, k_5, k_6) of distortion were optimized under calibration)
/// * b\) result of fisheye::undistortImage of fisheye camera model (all possible coefficients (k_1, k_2,
/// k_3, k_4) of fisheye distortion were optimized under calibration)
/// * c\) original image was captured with fisheye lens
///
/// Pictures a) and b) almost the same. But if we consider points of image located far from the center
/// of image, we can notice that on image a) these points are distorted.
///
/// 
///
/// ## C++ default parameters
/// * knew: cv::noArray()
/// * new_size: Size()
pub fn fisheye_undistort_image(distorted: &dyn core::ToInputArray, undistorted: &mut dyn core::ToOutputArray, k: &dyn core::ToInputArray, d: &dyn core::ToInputArray, knew: &dyn core::ToInputArray, new_size: core::Size) -> Result<()> {
input_array_arg!(distorted);
output_array_arg!(undistorted);
input_array_arg!(k);
input_array_arg!(d);
input_array_arg!(knew);
unsafe { sys::cv_fisheye_undistortImage__InputArray__OutputArray__InputArray__InputArray__InputArray_Size(distorted.as_raw__InputArray(), undistorted.as_raw__OutputArray(), k.as_raw__InputArray(), d.as_raw__InputArray(), knew.as_raw__InputArray(), new_size) }.into_result()
}
/// Undistorts 2D points using fisheye model
///
/// ## Parameters
/// * distorted: Array of object points, 1xN/Nx1 2-channel (or vector\<Point2f\> ), where N is the
/// number of points in the view.
/// * K: Camera matrix .
/// * D: Input vector of distortion coefficients .
/// * R: Rectification transformation in the object space: 3x3 1-channel, or vector: 3x1/1x3
/// 1-channel or 1x1 3-channel
/// * P: New camera matrix (3x3) or new projection matrix (3x4)
/// * undistorted: Output array of image points, 1xN/Nx1 2-channel, or vector\<Point2f\> .
///
/// ## C++ default parameters
/// * r: noArray()
/// * p: noArray()
pub fn fisheye_undistort_points(distorted: &dyn core::ToInputArray, undistorted: &mut dyn core::ToOutputArray, k: &dyn core::ToInputArray, d: &dyn core::ToInputArray, r: &dyn core::ToInputArray, p: &dyn core::ToInputArray) -> Result<()> {
input_array_arg!(distorted);
output_array_arg!(undistorted);
input_array_arg!(k);
input_array_arg!(d);
input_array_arg!(r);
input_array_arg!(p);
unsafe { sys::cv_fisheye_undistortPoints__InputArray__OutputArray__InputArray__InputArray__InputArray__InputArray(distorted.as_raw__InputArray(), undistorted.as_raw__OutputArray(), k.as_raw__InputArray(), d.as_raw__InputArray(), r.as_raw__InputArray(), p.as_raw__InputArray()) }.into_result()
}
/// Returns the new camera matrix based on the free scaling parameter.
///
/// ## Parameters
/// * cameraMatrix: Input camera matrix.
/// * distCoeffs: Input vector of distortion coefficients
///  of
/// 4, 5, 8, 12 or 14 elements. If the vector is NULL/empty, the zero distortion coefficients are
/// assumed.
/// * imageSize: Original image size.
/// * alpha: Free scaling parameter between 0 (when all the pixels in the undistorted image are
/// valid) and 1 (when all the source image pixels are retained in the undistorted image). See
/// stereoRectify for details.
/// * newImgSize: Image size after rectification. By default,it is set to imageSize .
/// * validPixROI: Optional output rectangle that outlines all-good-pixels region in the
/// undistorted image. See roi1, roi2 description in stereoRectify .
/// * centerPrincipalPoint: Optional flag that indicates whether in the new camera matrix the
/// principal point should be at the image center or not. By default, the principal point is chosen to
/// best fit a subset of the source image (determined by alpha) to the corrected image.
/// ## Returns
/// new_camera_matrix Output new camera matrix.
///
/// The function computes and returns the optimal new camera matrix based on the free scaling parameter.
/// By varying this parameter, you may retrieve only sensible pixels alpha=0 , keep all the original
/// image pixels if there is valuable information in the corners alpha=1 , or get something in between.
/// When alpha\>0 , the undistortion result is likely to have some black pixels corresponding to
/// "virtual" pixels outside of the captured distorted image. The original camera matrix, distortion
/// coefficients, the computed new camera matrix, and newImageSize should be passed to
/// initUndistortRectifyMap to produce the maps for remap .
///
/// ## C++ default parameters
/// * new_img_size: Size()
/// * valid_pix_roi: 0
/// * center_principal_point: false
pub fn get_optimal_new_camera_matrix(camera_matrix: &dyn core::ToInputArray, dist_coeffs: &dyn core::ToInputArray, image_size: core::Size, alpha: f64, new_img_size: core::Size, valid_pix_roi: &mut core::Rect, center_principal_point: bool) -> Result<core::Mat> {
input_array_arg!(camera_matrix);
input_array_arg!(dist_coeffs);
unsafe { sys::cv_getOptimalNewCameraMatrix__InputArray__InputArray_Size_double_Size_Rect_X_bool(camera_matrix.as_raw__InputArray(), dist_coeffs.as_raw__InputArray(), image_size, alpha, new_img_size, valid_pix_roi, center_principal_point) }.into_result().map(|ptr| core::Mat { ptr })
}
/// computes valid disparity ROI from the valid ROIs of the rectified images (that are returned by cv::stereoRectify())
pub fn get_valid_disparity_roi(roi1: core::Rect, roi2: core::Rect, min_disparity: i32, number_of_disparities: i32, sad_window_size: i32) -> Result<core::Rect> {
unsafe { sys::cv_getValidDisparityROI_Rect_Rect_int_int_int(roi1, roi2, min_disparity, number_of_disparities, sad_window_size) }.into_result()
}
/// Finds an initial camera matrix from 3D-2D point correspondences.
///
/// ## Parameters
/// * objectPoints: Vector of vectors of the calibration pattern points in the calibration pattern
/// coordinate space. In the old interface all the per-view vectors are concatenated. See
/// calibrateCamera for details.
/// * imagePoints: Vector of vectors of the projections of the calibration pattern points. In the
/// old interface all the per-view vectors are concatenated.
/// * imageSize: Image size in pixels used to initialize the principal point.
/// * aspectRatio: If it is zero or negative, both  and  are estimated independently.
/// Otherwise,  .
///
/// The function estimates and returns an initial camera matrix for the camera calibration process.
/// Currently, the function only supports planar calibration patterns, which are patterns where each
/// object point has z-coordinate =0.
///
/// ## C++ default parameters
/// * aspect_ratio: 1.0
pub fn init_camera_matrix_2d(object_points: &dyn core::ToInputArray, image_points: &dyn core::ToInputArray, image_size: core::Size, aspect_ratio: f64) -> Result<core::Mat> {
input_array_arg!(object_points);
input_array_arg!(image_points);
unsafe { sys::cv_initCameraMatrix2D__InputArray__InputArray_Size_double(object_points.as_raw__InputArray(), image_points.as_raw__InputArray(), image_size, aspect_ratio) }.into_result().map(|ptr| core::Mat { ptr })
}
/// Computes partial derivatives of the matrix product for each multiplied matrix.
///
/// ## Parameters
/// * A: First multiplied matrix.
/// * B: Second multiplied matrix.
/// * dABdA: First output derivative matrix d(A\*B)/dA of size
///  .
/// * dABdB: Second output derivative matrix d(A\*B)/dB of size
///  .
///
/// The function computes partial derivatives of the elements of the matrix product  with regard to
/// the elements of each of the two input matrices. The function is used to compute the Jacobian
/// matrices in stereoCalibrate but can also be used in any other similar optimization function.
pub fn mat_mul_deriv(a: &dyn core::ToInputArray, b: &dyn core::ToInputArray, d_a_bd_a: &mut dyn core::ToOutputArray, d_a_bd_b: &mut dyn core::ToOutputArray) -> Result<()> {
input_array_arg!(a);
input_array_arg!(b);
output_array_arg!(d_a_bd_a);
output_array_arg!(d_a_bd_b);
unsafe { sys::cv_matMulDeriv__InputArray__InputArray__OutputArray__OutputArray(a.as_raw__InputArray(), b.as_raw__InputArray(), d_a_bd_a.as_raw__OutputArray(), d_a_bd_b.as_raw__OutputArray()) }.into_result()
}
/// Projects 3D points to an image plane.
///
/// ## Parameters
/// * objectPoints: Array of object points, 3xN/Nx3 1-channel or 1xN/Nx1 3-channel (or
/// vector\<Point3f\> ), where N is the number of points in the view.
/// * rvec: Rotation vector. See Rodrigues for details.
/// * tvec: Translation vector.
/// * cameraMatrix: Camera matrix  .
/// * distCoeffs: Input vector of distortion coefficients
///  of
/// 4, 5, 8, 12 or 14 elements. If the vector is empty, the zero distortion coefficients are assumed.
/// * imagePoints: Output array of image points, 2xN/Nx2 1-channel or 1xN/Nx1 2-channel, or
/// vector\<Point2f\> .
/// * jacobian: Optional output 2Nx(10+\<numDistCoeffs\>) jacobian matrix of derivatives of image
/// points with respect to components of the rotation vector, translation vector, focal lengths,
/// coordinates of the principal point and the distortion coefficients. In the old interface different
/// components of the jacobian are returned via different output parameters.
/// * aspectRatio: Optional "fixed aspect ratio" parameter. If the parameter is not 0, the
/// function assumes that the aspect ratio (*fx/fy*) is fixed and correspondingly adjusts the jacobian
/// matrix.
///
/// The function computes projections of 3D points to the image plane given intrinsic and extrinsic
/// camera parameters. Optionally, the function computes Jacobians - matrices of partial derivatives of
/// image points coordinates (as functions of all the input parameters) with respect to the particular
/// parameters, intrinsic and/or extrinsic. The Jacobians are used during the global optimization in
/// calibrateCamera, solvePnP, and stereoCalibrate . The function itself can also be used to compute a
/// re-projection error given the current intrinsic and extrinsic parameters.
///
///
/// Note: By setting rvec=tvec=(0,0,0) or by setting cameraMatrix to a 3x3 identity matrix, or by
/// passing zero distortion coefficients, you can get various useful partial cases of the function. This
/// means that you can compute the distorted coordinates for a sparse set of points or apply a
/// perspective transformation (and also compute the derivatives) in the ideal zero-distortion setup.
///
/// ## C++ default parameters
/// * jacobian: noArray()
/// * aspect_ratio: 0
pub fn project_points(object_points: &dyn core::ToInputArray, rvec: &dyn core::ToInputArray, tvec: &dyn core::ToInputArray, camera_matrix: &dyn core::ToInputArray, dist_coeffs: &dyn core::ToInputArray, image_points: &mut dyn core::ToOutputArray, jacobian: &mut dyn core::ToOutputArray, aspect_ratio: f64) -> Result<()> {
input_array_arg!(object_points);
input_array_arg!(rvec);
input_array_arg!(tvec);
input_array_arg!(camera_matrix);
input_array_arg!(dist_coeffs);
output_array_arg!(image_points);
output_array_arg!(jacobian);
unsafe { sys::cv_projectPoints__InputArray__InputArray__InputArray__InputArray__InputArray__OutputArray__OutputArray_double(object_points.as_raw__InputArray(), rvec.as_raw__InputArray(), tvec.as_raw__InputArray(), camera_matrix.as_raw__InputArray(), dist_coeffs.as_raw__InputArray(), image_points.as_raw__OutputArray(), jacobian.as_raw__OutputArray(), aspect_ratio) }.into_result()
}
/// Recover relative camera rotation and translation from an estimated essential matrix and the
/// corresponding points in two images, using cheirality check. Returns the number of inliers which pass
/// the check.
///
/// ## Parameters
/// * E: The input essential matrix.
/// * points1: Array of N 2D points from the first image. The point coordinates should be
/// floating-point (single or double precision).
/// * points2: Array of the second image points of the same size and format as points1 .
/// * cameraMatrix: Camera matrix  .
/// Note that this function assumes that points1 and points2 are feature points from cameras with the
/// same camera matrix.
/// * R: Recovered relative rotation.
/// * t: Recoverd relative translation.
/// * mask: Input/output mask for inliers in points1 and points2.
/// : If it is not empty, then it marks inliers in points1 and points2 for then given essential
/// matrix E. Only these inliers will be used to recover pose. In the output mask only inliers
/// which pass the cheirality check.
/// This function decomposes an essential matrix using decomposeEssentialMat and then verifies possible
/// pose hypotheses by doing cheirality check. The cheirality check basically means that the
/// triangulated 3D points should have positive depth. Some details can be found in [Nister03](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_Nister03) .
///
/// This function can be used to process output E and mask from findEssentialMat. In this scenario,
/// points1 and points2 are the same input for findEssentialMat. :
/// ```ignore
/// // Example. Estimation of fundamental matrix using the RANSAC algorithm
/// int point_count = 100;
/// vector<Point2f> points1(point_count);
/// vector<Point2f> points2(point_count);
///
/// // initialize the points here ...
/// for( int i = 0; i < point_count; i++ )
/// {
/// points1[i] = ...;
/// points2[i] = ...;
/// }
///
/// // cametra matrix with both focal lengths = 1, and principal point = (0, 0)
/// Mat cameraMatrix = Mat::eye(3, 3, CV_64F);
///
/// Mat E, R, t, mask;
///
/// E = findEssentialMat(points1, points2, cameraMatrix, RANSAC, 0.999, 1.0, mask);
/// recoverPose(E, points1, points2, cameraMatrix, R, t, mask);
/// ```
///
/// ## C++ default parameters
/// * mask: noArray()
pub fn recover_pose_camera_with_points(e: &dyn core::ToInputArray, points1: &dyn core::ToInputArray, points2: &dyn core::ToInputArray, camera_matrix: &dyn core::ToInputArray, r: &mut dyn core::ToOutputArray, t: &mut dyn core::ToOutputArray, mask: &mut dyn core::ToInputOutputArray) -> Result<i32> {
input_array_arg!(e);
input_array_arg!(points1);
input_array_arg!(points2);
input_array_arg!(camera_matrix);
output_array_arg!(r);
output_array_arg!(t);
input_output_array_arg!(mask);
unsafe { sys::cv_recoverPose__InputArray__InputArray__InputArray__InputArray__OutputArray__OutputArray__InputOutputArray(e.as_raw__InputArray(), points1.as_raw__InputArray(), points2.as_raw__InputArray(), camera_matrix.as_raw__InputArray(), r.as_raw__OutputArray(), t.as_raw__OutputArray(), mask.as_raw__InputOutputArray()) }.into_result()
}
/// Recover relative camera rotation and translation from an estimated essential matrix and the
/// corresponding points in two images, using cheirality check. Returns the number of inliers which pass
/// the check.
///
/// ## Parameters
/// * E: The input essential matrix.
/// * points1: Array of N 2D points from the first image. The point coordinates should be
/// floating-point (single or double precision).
/// * points2: Array of the second image points of the same size and format as points1 .
/// * cameraMatrix: Camera matrix  .
/// Note that this function assumes that points1 and points2 are feature points from cameras with the
/// same camera matrix.
/// * R: Recovered relative rotation.
/// * t: Recoverd relative translation.
/// * mask: Input/output mask for inliers in points1 and points2.
/// : If it is not empty, then it marks inliers in points1 and points2 for then given essential
/// matrix E. Only these inliers will be used to recover pose. In the output mask only inliers
/// which pass the cheirality check.
/// This function decomposes an essential matrix using decomposeEssentialMat and then verifies possible
/// pose hypotheses by doing cheirality check. The cheirality check basically means that the
/// triangulated 3D points should have positive depth. Some details can be found in [Nister03](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_Nister03) .
///
/// This function can be used to process output E and mask from findEssentialMat. In this scenario,
/// points1 and points2 are the same input for findEssentialMat. :
/// ```ignore
/// // Example. Estimation of fundamental matrix using the RANSAC algorithm
/// int point_count = 100;
/// vector<Point2f> points1(point_count);
/// vector<Point2f> points2(point_count);
///
/// // initialize the points here ...
/// for( int i = 0; i < point_count; i++ )
/// {
/// points1[i] = ...;
/// points2[i] = ...;
/// }
///
/// // cametra matrix with both focal lengths = 1, and principal point = (0, 0)
/// Mat cameraMatrix = Mat::eye(3, 3, CV_64F);
///
/// Mat E, R, t, mask;
///
/// E = findEssentialMat(points1, points2, cameraMatrix, RANSAC, 0.999, 1.0, mask);
/// recoverPose(E, points1, points2, cameraMatrix, R, t, mask);
/// ```
///
///
/// ## Overloaded parameters
///
/// * E: The input essential matrix.
/// * points1: Array of N 2D points from the first image. The point coordinates should be
/// floating-point (single or double precision).
/// * points2: Array of the second image points of the same size and format as points1 .
/// * R: Recovered relative rotation.
/// * t: Recoverd relative translation.
/// * focal: Focal length of the camera. Note that this function assumes that points1 and points2
/// are feature points from cameras with same focal length and principal point.
/// * pp: principal point of the camera.
/// * mask: Input/output mask for inliers in points1 and points2.
/// : If it is not empty, then it marks inliers in points1 and points2 for then given essential
/// matrix E. Only these inliers will be used to recover pose. In the output mask only inliers
/// which pass the cheirality check.
///
/// This function differs from the one above that it computes camera matrix from focal length and
/// principal point:
///
/// 
///
/// ## C++ default parameters
/// * focal: 1.0
/// * pp: Point2d(0, 0)
/// * mask: noArray()
pub fn recover_pose(e: &dyn core::ToInputArray, points1: &dyn core::ToInputArray, points2: &dyn core::ToInputArray, r: &mut dyn core::ToOutputArray, t: &mut dyn core::ToOutputArray, focal: f64, pp: core::Point2d, mask: &mut dyn core::ToInputOutputArray) -> Result<i32> {
input_array_arg!(e);
input_array_arg!(points1);
input_array_arg!(points2);
output_array_arg!(r);
output_array_arg!(t);
input_output_array_arg!(mask);
unsafe { sys::cv_recoverPose__InputArray__InputArray__InputArray__OutputArray__OutputArray_double_Point2d__InputOutputArray(e.as_raw__InputArray(), points1.as_raw__InputArray(), points2.as_raw__InputArray(), r.as_raw__OutputArray(), t.as_raw__OutputArray(), focal, pp, mask.as_raw__InputOutputArray()) }.into_result()
}
/// computes the rectification transformations for 3-head camera, where all the heads are on the same line.
pub fn rectify3_collinear(camera_matrix1: &dyn core::ToInputArray, dist_coeffs1: &dyn core::ToInputArray, camera_matrix2: &dyn core::ToInputArray, dist_coeffs2: &dyn core::ToInputArray, camera_matrix3: &dyn core::ToInputArray, dist_coeffs3: &dyn core::ToInputArray, imgpt1: &dyn core::ToInputArray, imgpt3: &dyn core::ToInputArray, image_size: core::Size, r12: &dyn core::ToInputArray, t12: &dyn core::ToInputArray, r13: &dyn core::ToInputArray, t13: &dyn core::ToInputArray, r1: &mut dyn core::ToOutputArray, r2: &mut dyn core::ToOutputArray, r3: &mut dyn core::ToOutputArray, p1: &mut dyn core::ToOutputArray, p2: &mut dyn core::ToOutputArray, p3: &mut dyn core::ToOutputArray, q: &mut dyn core::ToOutputArray, alpha: f64, new_img_size: core::Size, roi1: &mut core::Rect, roi2: &mut core::Rect, flags: i32) -> Result<f32> {
input_array_arg!(camera_matrix1);
input_array_arg!(dist_coeffs1);
input_array_arg!(camera_matrix2);
input_array_arg!(dist_coeffs2);
input_array_arg!(camera_matrix3);
input_array_arg!(dist_coeffs3);
input_array_arg!(imgpt1);
input_array_arg!(imgpt3);
input_array_arg!(r12);
input_array_arg!(t12);
input_array_arg!(r13);
input_array_arg!(t13);
output_array_arg!(r1);
output_array_arg!(r2);
output_array_arg!(r3);
output_array_arg!(p1);
output_array_arg!(p2);
output_array_arg!(p3);
output_array_arg!(q);
unsafe { sys::cv_rectify3Collinear__InputArray__InputArray__InputArray__InputArray__InputArray__InputArray__InputArray__InputArray_Size__InputArray__InputArray__InputArray__InputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray_double_Size_Rect_X_Rect_X_int(camera_matrix1.as_raw__InputArray(), dist_coeffs1.as_raw__InputArray(), camera_matrix2.as_raw__InputArray(), dist_coeffs2.as_raw__InputArray(), camera_matrix3.as_raw__InputArray(), dist_coeffs3.as_raw__InputArray(), imgpt1.as_raw__InputArray(), imgpt3.as_raw__InputArray(), image_size, r12.as_raw__InputArray(), t12.as_raw__InputArray(), r13.as_raw__InputArray(), t13.as_raw__InputArray(), r1.as_raw__OutputArray(), r2.as_raw__OutputArray(), r3.as_raw__OutputArray(), p1.as_raw__OutputArray(), p2.as_raw__OutputArray(), p3.as_raw__OutputArray(), q.as_raw__OutputArray(), alpha, new_img_size, roi1, roi2, flags) }.into_result()
}
/// Reprojects a disparity image to 3D space.
///
/// ## Parameters
/// * disparity: Input single-channel 8-bit unsigned, 16-bit signed, 32-bit signed or 32-bit
/// floating-point disparity image. If 16-bit signed format is used, the values are assumed to have no
/// fractional bits.
/// * _3dImage: Output 3-channel floating-point image of the same size as disparity . Each
/// element of _3dImage(x,y) contains 3D coordinates of the point (x,y) computed from the disparity
/// map.
/// * Q:  perspective transformation matrix that can be obtained with stereoRectify.
/// * handleMissingValues: Indicates, whether the function should handle missing values (i.e.
/// points where the disparity was not computed). If handleMissingValues=true, then pixels with the
/// minimal disparity that corresponds to the outliers (see StereoMatcher::compute ) are transformed
/// to 3D points with a very large Z value (currently set to 10000).
/// * ddepth: The optional output array depth. If it is -1, the output image will have CV_32F
/// depth. ddepth can also be set to CV_16S, CV_32S or CV_32F.
///
/// The function transforms a single-channel disparity map to a 3-channel image representing a 3D
/// surface. That is, for each pixel (x,y) andthe corresponding disparity d=disparity(x,y) , it
/// computes:
///
/// 
///
/// The matrix Q can be an arbitrary  matrix (for example, the one computed by
/// stereoRectify). To reproject a sparse set of points {(x,y,d),...} to 3D space, use
/// perspectiveTransform .
///
/// ## C++ default parameters
/// * handle_missing_values: false
/// * ddepth: -1
pub fn reproject_image_to_3d(disparity: &dyn core::ToInputArray, _3d_image: &mut dyn core::ToOutputArray, q: &dyn core::ToInputArray, handle_missing_values: bool, ddepth: i32) -> Result<()> {
input_array_arg!(disparity);
output_array_arg!(_3d_image);
input_array_arg!(q);
unsafe { sys::cv_reprojectImageTo3D__InputArray__OutputArray__InputArray_bool_int(disparity.as_raw__InputArray(), _3d_image.as_raw__OutputArray(), q.as_raw__InputArray(), handle_missing_values, ddepth) }.into_result()
}
/// Calculates the Sampson Distance between two points.
///
/// The function sampsonDistance calculates and returns the first order approximation of the geometric error as:
/// 
/// The fundamental matrix may be calculated using the cv::findFundamentalMat function. See HZ 11.4.3 for details.
/// ## Parameters
/// * pt1: first homogeneous 2d point
/// * pt2: second homogeneous 2d point
/// * F: fundamental matrix
pub fn sampson_distance(pt1: &dyn core::ToInputArray, pt2: &dyn core::ToInputArray, f: &dyn core::ToInputArray) -> Result<f64> {
input_array_arg!(pt1);
input_array_arg!(pt2);
input_array_arg!(f);
unsafe { sys::cv_sampsonDistance__InputArray__InputArray__InputArray(pt1.as_raw__InputArray(), pt2.as_raw__InputArray(), f.as_raw__InputArray()) }.into_result()
}
/// Finds an object pose from 3D-2D point correspondences using the RANSAC scheme.
///
/// ## Parameters
/// * objectPoints: Array of object points in the object coordinate space, Nx3 1-channel or
/// 1xN/Nx1 3-channel, where N is the number of points. vector\<Point3f\> can be also passed here.
/// * imagePoints: Array of corresponding image points, Nx2 1-channel or 1xN/Nx1 2-channel,
/// where N is the number of points. vector\<Point2f\> can be also passed here.
/// * cameraMatrix: Input camera matrix  .
/// * distCoeffs: Input vector of distortion coefficients
///  of
/// 4, 5, 8, 12 or 14 elements. If the vector is NULL/empty, the zero distortion coefficients are
/// assumed.
/// * rvec: Output rotation vector (see Rodrigues ) that, together with tvec , brings points from
/// the model coordinate system to the camera coordinate system.
/// * tvec: Output translation vector.
/// * useExtrinsicGuess: Parameter used for SOLVEPNP_ITERATIVE. If true (1), the function uses
/// the provided rvec and tvec values as initial approximations of the rotation and translation
/// vectors, respectively, and further optimizes them.
/// * iterationsCount: Number of iterations.
/// * reprojectionError: Inlier threshold value used by the RANSAC procedure. The parameter value
/// is the maximum allowed distance between the observed and computed point projections to consider it
/// an inlier.
/// * confidence: The probability that the algorithm produces a useful result.
/// * inliers: Output vector that contains indices of inliers in objectPoints and imagePoints .
/// * flags: Method for solving a PnP problem (see solvePnP ).
///
/// The function estimates an object pose given a set of object points, their corresponding image
/// projections, as well as the camera matrix and the distortion coefficients. This function finds such
/// a pose that minimizes reprojection error, that is, the sum of squared distances between the observed
/// projections imagePoints and the projected (using projectPoints ) objectPoints. The use of RANSAC
/// makes the function resistant to outliers.
///
///
/// Note:
/// * An example of how to use solvePNPRansac for object detection can be found at
/// opencv_source_code/samples/cpp/tutorial_code/calib3d/real_time_pose_estimation/
///
/// ## C++ default parameters
/// * use_extrinsic_guess: false
/// * iterations_count: 100
/// * reprojection_error: 8.0
/// * confidence: 0.99
/// * inliers: noArray()
/// * flags: SOLVEPNP_ITERATIVE
pub fn solve_pnp_ransac(object_points: &dyn core::ToInputArray, image_points: &dyn core::ToInputArray, camera_matrix: &dyn core::ToInputArray, dist_coeffs: &dyn core::ToInputArray, rvec: &mut dyn core::ToOutputArray, tvec: &mut dyn core::ToOutputArray, use_extrinsic_guess: bool, iterations_count: i32, reprojection_error: f32, confidence: f64, inliers: &mut dyn core::ToOutputArray, flags: i32) -> Result<bool> {
input_array_arg!(object_points);
input_array_arg!(image_points);
input_array_arg!(camera_matrix);
input_array_arg!(dist_coeffs);
output_array_arg!(rvec);
output_array_arg!(tvec);
output_array_arg!(inliers);
unsafe { sys::cv_solvePnPRansac__InputArray__InputArray__InputArray__InputArray__OutputArray__OutputArray_bool_int_float_double__OutputArray_int(object_points.as_raw__InputArray(), image_points.as_raw__InputArray(), camera_matrix.as_raw__InputArray(), dist_coeffs.as_raw__InputArray(), rvec.as_raw__OutputArray(), tvec.as_raw__OutputArray(), use_extrinsic_guess, iterations_count, reprojection_error, confidence, inliers.as_raw__OutputArray(), flags) }.into_result()
}
/// Finds an object pose from 3D-2D point correspondences.
///
/// ## Parameters
/// * objectPoints: Array of object points in the object coordinate space, Nx3 1-channel or
/// 1xN/Nx1 3-channel, where N is the number of points. vector\<Point3f\> can be also passed here.
/// * imagePoints: Array of corresponding image points, Nx2 1-channel or 1xN/Nx1 2-channel,
/// where N is the number of points. vector\<Point2f\> can be also passed here.
/// * cameraMatrix: Input camera matrix  .
/// * distCoeffs: Input vector of distortion coefficients
///  of
/// 4, 5, 8, 12 or 14 elements. If the vector is NULL/empty, the zero distortion coefficients are
/// assumed.
/// * rvec: Output rotation vector (see Rodrigues ) that, together with tvec , brings points from
/// the model coordinate system to the camera coordinate system.
/// * tvec: Output translation vector.
/// * useExtrinsicGuess: Parameter used for SOLVEPNP_ITERATIVE. If true (1), the function uses
/// the provided rvec and tvec values as initial approximations of the rotation and translation
/// vectors, respectively, and further optimizes them.
/// * flags: Method for solving a PnP problem:
/// * **SOLVEPNP_ITERATIVE** Iterative method is based on Levenberg-Marquardt optimization. In
/// this case the function finds such a pose that minimizes reprojection error, that is the sum
/// of squared distances between the observed projections imagePoints and the projected (using
/// projectPoints ) objectPoints .
/// * **SOLVEPNP_P3P** Method is based on the paper of X.S. Gao, X.-R. Hou, J. Tang, H.-F. Chang
/// "Complete Solution Classification for the Perspective-Three-Point Problem". In this case the
/// function requires exactly four object and image points.
/// * **SOLVEPNP_EPNP** Method has been introduced by F.Moreno-Noguer, V.Lepetit and P.Fua in the
/// paper "EPnP: Efficient Perspective-n-Point Camera Pose Estimation".
/// * **SOLVEPNP_DLS** Method is based on the paper of Joel A. Hesch and Stergios I. Roumeliotis.
/// "A Direct Least-Squares (DLS) Method for PnP".
/// * **SOLVEPNP_UPNP** Method is based on the paper of A.Penate-Sanchez, J.Andrade-Cetto,
/// F.Moreno-Noguer. "Exhaustive Linearization for Robust Camera Pose and Focal Length
/// Estimation". In this case the function also estimates the parameters  and 
/// assuming that both have the same value. Then the cameraMatrix is updated with the estimated
/// focal length.
///
/// The function estimates the object pose given a set of object points, their corresponding image
/// projections, as well as the camera matrix and the distortion coefficients.
///
///
/// Note:
/// * An example of how to use solvePnP for planar augmented reality can be found at
/// opencv_source_code/samples/python/plane_ar.py
/// * If you are using Python:
/// - Numpy array slices won't work as input because solvePnP requires contiguous
/// arrays (enforced by the assertion using cv::Mat::checkVector() around line 55 of
/// modules/calib3d/src/solvepnp.cpp version 2.4.9)
/// - The P3P algorithm requires image points to be in an array of shape (N,1,2) due
/// to its calling of cv::undistortPoints (around line 75 of modules/calib3d/src/solvepnp.cpp version 2.4.9)
/// which requires 2-channel information.
/// - Thus, given some data D = np.array(...) where D.shape = (N,M), in order to use a subset of
/// it as, e.g., imagePoints, one must effectively copy it into a new array: imagePoints =
/// np.ascontiguousarray(D[:,:2]).reshape((N,1,2))
/// * The methods **SOLVEPNP_DLS** and **SOLVEPNP_UPNP** cannot be used as the current implementations are
/// unstable and sometimes give completly wrong results. If you pass one of these two flags,
/// **SOLVEPNP_EPNP** method will be used instead.
///
/// ## C++ default parameters
/// * use_extrinsic_guess: false
/// * flags: SOLVEPNP_ITERATIVE
pub fn solve_pnp(object_points: &dyn core::ToInputArray, image_points: &dyn core::ToInputArray, camera_matrix: &dyn core::ToInputArray, dist_coeffs: &dyn core::ToInputArray, rvec: &mut dyn core::ToOutputArray, tvec: &mut dyn core::ToOutputArray, use_extrinsic_guess: bool, flags: i32) -> Result<bool> {
input_array_arg!(object_points);
input_array_arg!(image_points);
input_array_arg!(camera_matrix);
input_array_arg!(dist_coeffs);
output_array_arg!(rvec);
output_array_arg!(tvec);
unsafe { sys::cv_solvePnP__InputArray__InputArray__InputArray__InputArray__OutputArray__OutputArray_bool_int(object_points.as_raw__InputArray(), image_points.as_raw__InputArray(), camera_matrix.as_raw__InputArray(), dist_coeffs.as_raw__InputArray(), rvec.as_raw__OutputArray(), tvec.as_raw__OutputArray(), use_extrinsic_guess, flags) }.into_result()
}
/// Calibrates the stereo camera.
///
/// ## Parameters
/// * objectPoints: Vector of vectors of the calibration pattern points.
/// * imagePoints1: Vector of vectors of the projections of the calibration pattern points,
/// observed by the first camera.
/// * imagePoints2: Vector of vectors of the projections of the calibration pattern points,
/// observed by the second camera.
/// * cameraMatrix1: Input/output first camera matrix:
///  ,  . If
/// any of CV_CALIB_USE_INTRINSIC_GUESS , CV_CALIB_FIX_ASPECT_RATIO ,
/// CV_CALIB_FIX_INTRINSIC , or CV_CALIB_FIX_FOCAL_LENGTH are specified, some or all of the
/// matrix components must be initialized. See the flags description for details.
/// * distCoeffs1: Input/output vector of distortion coefficients
///  of
/// 4, 5, 8, 12 or 14 elements. The output vector length depends on the flags.
/// * cameraMatrix2: Input/output second camera matrix. The parameter is similar to cameraMatrix1
/// * distCoeffs2: Input/output lens distortion coefficients for the second camera. The parameter
/// is similar to distCoeffs1 .
/// * imageSize: Size of the image used only to initialize intrinsic camera matrix.
/// * R: Output rotation matrix between the 1st and the 2nd camera coordinate systems.
/// * T: Output translation vector between the coordinate systems of the cameras.
/// * E: Output essential matrix.
/// * F: Output fundamental matrix.
/// * flags: Different flags that may be zero or a combination of the following values:
/// * **CV_CALIB_FIX_INTRINSIC** Fix cameraMatrix? and distCoeffs? so that only R, T, E , and F
/// matrices are estimated.
/// * **CV_CALIB_USE_INTRINSIC_GUESS** Optimize some or all of the intrinsic parameters
/// according to the specified flags. Initial values are provided by the user.
/// * **CV_CALIB_FIX_PRINCIPAL_POINT** Fix the principal points during the optimization.
/// * **CV_CALIB_FIX_FOCAL_LENGTH** Fix  and  .
/// * **CV_CALIB_FIX_ASPECT_RATIO** Optimize  . Fix the ratio 
/// .
/// * **CV_CALIB_SAME_FOCAL_LENGTH** Enforce  and  .
/// * **CV_CALIB_ZERO_TANGENT_DIST** Set tangential distortion coefficients for each camera to
/// zeros and fix there.
/// * **CV_CALIB_FIX_K1,...,CV_CALIB_FIX_K6** Do not change the corresponding radial
/// distortion coefficient during the optimization. If CV_CALIB_USE_INTRINSIC_GUESS is set,
/// the coefficient from the supplied distCoeffs matrix is used. Otherwise, it is set to 0.
/// * **CV_CALIB_RATIONAL_MODEL** Enable coefficients k4, k5, and k6. To provide the backward
/// compatibility, this extra flag should be explicitly specified to make the calibration
/// function use the rational model and return 8 coefficients. If the flag is not set, the
/// function computes and returns only 5 distortion coefficients.
/// * **CALIB_THIN_PRISM_MODEL** Coefficients s1, s2, s3 and s4 are enabled. To provide the
/// backward compatibility, this extra flag should be explicitly specified to make the
/// calibration function use the thin prism model and return 12 coefficients. If the flag is not
/// set, the function computes and returns only 5 distortion coefficients.
/// * **CALIB_FIX_S1_S2_S3_S4** The thin prism distortion coefficients are not changed during
/// the optimization. If CV_CALIB_USE_INTRINSIC_GUESS is set, the coefficient from the
/// supplied distCoeffs matrix is used. Otherwise, it is set to 0.
/// * **CALIB_TILTED_MODEL** Coefficients tauX and tauY are enabled. To provide the
/// backward compatibility, this extra flag should be explicitly specified to make the
/// calibration function use the tilted sensor model and return 14 coefficients. If the flag is not
/// set, the function computes and returns only 5 distortion coefficients.
/// * **CALIB_FIX_TAUX_TAUY** The coefficients of the tilted sensor model are not changed during
/// the optimization. If CV_CALIB_USE_INTRINSIC_GUESS is set, the coefficient from the
/// supplied distCoeffs matrix is used. Otherwise, it is set to 0.
/// * criteria: Termination criteria for the iterative optimization algorithm.
///
/// The function estimates transformation between two cameras making a stereo pair. If you have a stereo
/// camera where the relative position and orientation of two cameras is fixed, and if you computed
/// poses of an object relative to the first camera and to the second camera, (R1, T1) and (R2, T2),
/// respectively (this can be done with solvePnP ), then those poses definitely relate to each other.
/// This means that, given ( , ), it should be possible to compute ( , ). You only
/// need to know the position and orientation of the second camera relative to the first camera. This is
/// what the described function does. It computes ( , ) so that:
///
/// 
///
/// Optionally, it computes the essential matrix E:
///
/// 
///
/// where  are components of the translation vector  :  . And the function
/// can also compute the fundamental matrix F:
///
/// 
///
/// Besides the stereo-related information, the function can also perform a full calibration of each of
/// two cameras. However, due to the high dimensionality of the parameter space and noise in the input
/// data, the function can diverge from the correct solution. If the intrinsic parameters can be
/// estimated with high accuracy for each of the cameras individually (for example, using
/// calibrateCamera ), you are recommended to do so and then pass CV_CALIB_FIX_INTRINSIC flag to the
/// function along with the computed intrinsic parameters. Otherwise, if all the parameters are
/// estimated at once, it makes sense to restrict some parameters, for example, pass
/// CV_CALIB_SAME_FOCAL_LENGTH and CV_CALIB_ZERO_TANGENT_DIST flags, which is usually a
/// reasonable assumption.
///
/// Similarly to calibrateCamera , the function minimizes the total re-projection error for all the
/// points in all the available views from both cameras. The function returns the final value of the
/// re-projection error.
///
/// ## C++ default parameters
/// * flags: CALIB_FIX_INTRINSIC
/// * criteria: TermCriteria(TermCriteria::COUNT+TermCriteria::EPS, 30, 1e-6)
pub fn stereo_calibrate_camera(object_points: &dyn core::ToInputArray, image_points1: &dyn core::ToInputArray, image_points2: &dyn core::ToInputArray, camera_matrix1: &mut dyn core::ToInputOutputArray, dist_coeffs1: &mut dyn core::ToInputOutputArray, camera_matrix2: &mut dyn core::ToInputOutputArray, dist_coeffs2: &mut dyn core::ToInputOutputArray, image_size: core::Size, r: &mut dyn core::ToOutputArray, t: &mut dyn core::ToOutputArray, e: &mut dyn core::ToOutputArray, f: &mut dyn core::ToOutputArray, flags: i32, criteria: &core::TermCriteria) -> Result<f64> {
input_array_arg!(object_points);
input_array_arg!(image_points1);
input_array_arg!(image_points2);
input_output_array_arg!(camera_matrix1);
input_output_array_arg!(dist_coeffs1);
input_output_array_arg!(camera_matrix2);
input_output_array_arg!(dist_coeffs2);
output_array_arg!(r);
output_array_arg!(t);
output_array_arg!(e);
output_array_arg!(f);
unsafe { sys::cv_stereoCalibrate__InputArray__InputArray__InputArray__InputOutputArray__InputOutputArray__InputOutputArray__InputOutputArray_Size__OutputArray__OutputArray__OutputArray__OutputArray_int_TermCriteria(object_points.as_raw__InputArray(), image_points1.as_raw__InputArray(), image_points2.as_raw__InputArray(), camera_matrix1.as_raw__InputOutputArray(), dist_coeffs1.as_raw__InputOutputArray(), camera_matrix2.as_raw__InputOutputArray(), dist_coeffs2.as_raw__InputOutputArray(), image_size, r.as_raw__OutputArray(), t.as_raw__OutputArray(), e.as_raw__OutputArray(), f.as_raw__OutputArray(), flags, criteria.as_raw_TermCriteria()) }.into_result()
}
/// Computes a rectification transform for an uncalibrated stereo camera.
///
/// ## Parameters
/// * points1: Array of feature points in the first image.
/// * points2: The corresponding points in the second image. The same formats as in
/// findFundamentalMat are supported.
/// * F: Input fundamental matrix. It can be computed from the same set of point pairs using
/// findFundamentalMat .
/// * imgSize: Size of the image.
/// * H1: Output rectification homography matrix for the first image.
/// * H2: Output rectification homography matrix for the second image.
/// * threshold: Optional threshold used to filter out the outliers. If the parameter is greater
/// than zero, all the point pairs that do not comply with the epipolar geometry (that is, the points
/// for which  ) are
/// rejected prior to computing the homographies. Otherwise,all the points are considered inliers.
///
/// The function computes the rectification transformations without knowing intrinsic parameters of the
/// cameras and their relative position in the space, which explains the suffix "uncalibrated". Another
/// related difference from stereoRectify is that the function outputs not the rectification
/// transformations in the object (3D) space, but the planar perspective transformations encoded by the
/// homography matrices H1 and H2 . The function implements the algorithm [Hartley99](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_Hartley99) .
///
///
/// Note:
/// While the algorithm does not need to know the intrinsic parameters of the cameras, it heavily
/// depends on the epipolar geometry. Therefore, if the camera lenses have a significant distortion,
/// it would be better to correct it before computing the fundamental matrix and calling this
/// function. For example, distortion coefficients can be estimated for each head of stereo camera
/// separately by using calibrateCamera . Then, the images can be corrected using undistort , or
/// just the point coordinates can be corrected with undistortPoints .
///
/// ## C++ default parameters
/// * threshold: 5
pub fn stereo_rectify_uncalibrated(points1: &dyn core::ToInputArray, points2: &dyn core::ToInputArray, f: &dyn core::ToInputArray, img_size: core::Size, h1: &mut dyn core::ToOutputArray, h2: &mut dyn core::ToOutputArray, threshold: f64) -> Result<bool> {
input_array_arg!(points1);
input_array_arg!(points2);
input_array_arg!(f);
output_array_arg!(h1);
output_array_arg!(h2);
unsafe { sys::cv_stereoRectifyUncalibrated__InputArray__InputArray__InputArray_Size__OutputArray__OutputArray_double(points1.as_raw__InputArray(), points2.as_raw__InputArray(), f.as_raw__InputArray(), img_size, h1.as_raw__OutputArray(), h2.as_raw__OutputArray(), threshold) }.into_result()
}
/// Computes rectification transforms for each head of a calibrated stereo camera.
///
/// ## Parameters
/// * cameraMatrix1: First camera matrix.
/// * distCoeffs1: First camera distortion parameters.
/// * cameraMatrix2: Second camera matrix.
/// * distCoeffs2: Second camera distortion parameters.
/// * imageSize: Size of the image used for stereo calibration.
/// * R: Rotation matrix between the coordinate systems of the first and the second cameras.
/// * T: Translation vector between coordinate systems of the cameras.
/// * R1: Output 3x3 rectification transform (rotation matrix) for the first camera.
/// * R2: Output 3x3 rectification transform (rotation matrix) for the second camera.
/// * P1: Output 3x4 projection matrix in the new (rectified) coordinate systems for the first
/// camera.
/// * P2: Output 3x4 projection matrix in the new (rectified) coordinate systems for the second
/// camera.
/// * Q: Output  disparity-to-depth mapping matrix (see reprojectImageTo3D ).
/// * flags: Operation flags that may be zero or CV_CALIB_ZERO_DISPARITY . If the flag is set,
/// the function makes the principal points of each camera have the same pixel coordinates in the
/// rectified views. And if the flag is not set, the function may still shift the images in the
/// horizontal or vertical direction (depending on the orientation of epipolar lines) to maximize the
/// useful image area.
/// * alpha: Free scaling parameter. If it is -1 or absent, the function performs the default
/// scaling. Otherwise, the parameter should be between 0 and 1. alpha=0 means that the rectified
/// images are zoomed and shifted so that only valid pixels are visible (no black areas after
/// rectification). alpha=1 means that the rectified image is decimated and shifted so that all the
/// pixels from the original images from the cameras are retained in the rectified images (no source
/// image pixels are lost). Obviously, any intermediate value yields an intermediate result between
/// those two extreme cases.
/// * newImageSize: New image resolution after rectification. The same size should be passed to
/// initUndistortRectifyMap (see the stereo_calib.cpp sample in OpenCV samples directory). When (0,0)
/// is passed (default), it is set to the original imageSize . Setting it to larger value can help you
/// preserve details in the original image, especially when there is a big radial distortion.
/// * validPixROI1: Optional output rectangles inside the rectified images where all the pixels
/// are valid. If alpha=0 , the ROIs cover the whole images. Otherwise, they are likely to be smaller
/// (see the picture below).
/// * validPixROI2: Optional output rectangles inside the rectified images where all the pixels
/// are valid. If alpha=0 , the ROIs cover the whole images. Otherwise, they are likely to be smaller
/// (see the picture below).
///
/// The function computes the rotation matrices for each camera that (virtually) make both camera image
/// planes the same plane. Consequently, this makes all the epipolar lines parallel and thus simplifies
/// the dense stereo correspondence problem. The function takes the matrices computed by stereoCalibrate
/// as input. As output, it provides two rotation matrices and also two projection matrices in the new
/// coordinates. The function distinguishes the following two cases:
///
/// * **Horizontal stereo**: the first and the second camera views are shifted relative to each other
/// mainly along the x axis (with possible small vertical shift). In the rectified images, the
/// corresponding epipolar lines in the left and right cameras are horizontal and have the same
/// y-coordinate. P1 and P2 look like:
///
/// 
///
/// 
///
/// where  is a horizontal shift between the cameras and  if
/// CV_CALIB_ZERO_DISPARITY is set.
///
/// * **Vertical stereo**: the first and the second camera views are shifted relative to each other
/// mainly in vertical direction (and probably a bit in the horizontal direction too). The epipolar
/// lines in the rectified images are vertical and have the same x-coordinate. P1 and P2 look like:
///
/// 
///
/// 
///
/// where  is a vertical shift between the cameras and  if CALIB_ZERO_DISPARITY is
/// set.
///
/// As you can see, the first three columns of P1 and P2 will effectively be the new "rectified" camera
/// matrices. The matrices, together with R1 and R2 , can then be passed to initUndistortRectifyMap to
/// initialize the rectification map for each camera.
///
/// See below the screenshot from the stereo_calib.cpp sample. Some red horizontal lines pass through
/// the corresponding image regions. This means that the images are well rectified, which is what most
/// stereo correspondence algorithms rely on. The green rectangles are roi1 and roi2 . You see that
/// their interiors are all valid pixels.
///
/// 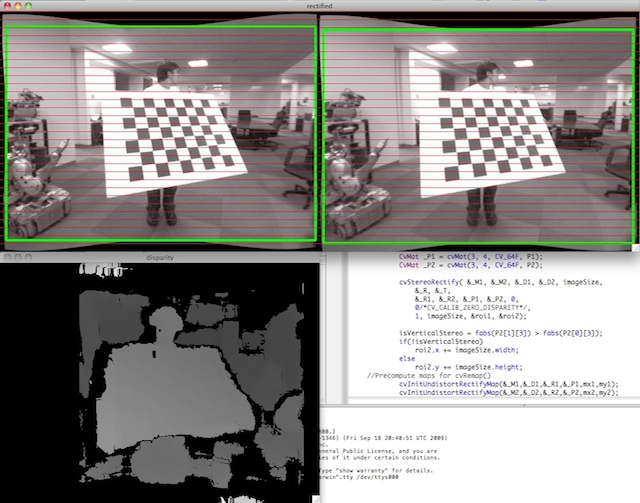
///
/// ## C++ default parameters
/// * flags: CALIB_ZERO_DISPARITY
/// * alpha: -1
/// * new_image_size: Size()
/// * valid_pix_roi1: 0
/// * valid_pix_roi2: 0
pub fn stereo_rectify_camera(camera_matrix1: &dyn core::ToInputArray, dist_coeffs1: &dyn core::ToInputArray, camera_matrix2: &dyn core::ToInputArray, dist_coeffs2: &dyn core::ToInputArray, image_size: core::Size, r: &dyn core::ToInputArray, t: &dyn core::ToInputArray, r1: &mut dyn core::ToOutputArray, r2: &mut dyn core::ToOutputArray, p1: &mut dyn core::ToOutputArray, p2: &mut dyn core::ToOutputArray, q: &mut dyn core::ToOutputArray, flags: i32, alpha: f64, new_image_size: core::Size, valid_pix_roi1: &mut core::Rect, valid_pix_roi2: &mut core::Rect) -> Result<()> {
input_array_arg!(camera_matrix1);
input_array_arg!(dist_coeffs1);
input_array_arg!(camera_matrix2);
input_array_arg!(dist_coeffs2);
input_array_arg!(r);
input_array_arg!(t);
output_array_arg!(r1);
output_array_arg!(r2);
output_array_arg!(p1);
output_array_arg!(p2);
output_array_arg!(q);
unsafe { sys::cv_stereoRectify__InputArray__InputArray__InputArray__InputArray_Size__InputArray__InputArray__OutputArray__OutputArray__OutputArray__OutputArray__OutputArray_int_double_Size_Rect_X_Rect_X(camera_matrix1.as_raw__InputArray(), dist_coeffs1.as_raw__InputArray(), camera_matrix2.as_raw__InputArray(), dist_coeffs2.as_raw__InputArray(), image_size, r.as_raw__InputArray(), t.as_raw__InputArray(), r1.as_raw__OutputArray(), r2.as_raw__OutputArray(), p1.as_raw__OutputArray(), p2.as_raw__OutputArray(), q.as_raw__OutputArray(), flags, alpha, new_image_size, valid_pix_roi1, valid_pix_roi2) }.into_result()
}
/// Reconstructs points by triangulation.
///
/// ## Parameters
/// * projMatr1: 3x4 projection matrix of the first camera.
/// * projMatr2: 3x4 projection matrix of the second camera.
/// * projPoints1: 2xN array of feature points in the first image. In case of c++ version it can
/// be also a vector of feature points or two-channel matrix of size 1xN or Nx1.
/// * projPoints2: 2xN array of corresponding points in the second image. In case of c++ version
/// it can be also a vector of feature points or two-channel matrix of size 1xN or Nx1.
/// * points4D: 4xN array of reconstructed points in homogeneous coordinates.
///
/// The function reconstructs 3-dimensional points (in homogeneous coordinates) by using their
/// observations with a stereo camera. Projections matrices can be obtained from stereoRectify.
///
///
/// Note:
/// Keep in mind that all input data should be of float type in order for this function to work.
///
/// ## See also
/// reprojectImageTo3D
pub fn triangulate_points(proj_matr1: &dyn core::ToInputArray, proj_matr2: &dyn core::ToInputArray, proj_points1: &dyn core::ToInputArray, proj_points2: &dyn core::ToInputArray, points4_d: &mut dyn core::ToOutputArray) -> Result<()> {
input_array_arg!(proj_matr1);
input_array_arg!(proj_matr2);
input_array_arg!(proj_points1);
input_array_arg!(proj_points2);
output_array_arg!(points4_d);
unsafe { sys::cv_triangulatePoints__InputArray__InputArray__InputArray__InputArray__OutputArray(proj_matr1.as_raw__InputArray(), proj_matr2.as_raw__InputArray(), proj_points1.as_raw__InputArray(), proj_points2.as_raw__InputArray(), points4_d.as_raw__OutputArray()) }.into_result()
}
/// validates disparity using the left-right check. The matrix "cost" should be computed by the stereo correspondence algorithm
///
/// ## C++ default parameters
/// * disp12_max_disp: 1
pub fn validate_disparity(disparity: &mut dyn core::ToInputOutputArray, cost: &dyn core::ToInputArray, min_disparity: i32, number_of_disparities: i32, disp12_max_disp: i32) -> Result<()> {
input_output_array_arg!(disparity);
input_array_arg!(cost);
unsafe { sys::cv_validateDisparity__InputOutputArray__InputArray_int_int_int(disparity.as_raw__InputOutputArray(), cost.as_raw__InputArray(), min_disparity, number_of_disparities, disp12_max_disp) }.into_result()
}
// Generating impl for trait cv::StereoBM (trait)
/// Class for computing stereo correspondence using the block matching algorithm, introduced and
/// contributed to OpenCV by K. Konolige.
pub trait StereoBM: crate::calib3d::StereoMatcher {
#[inline(always)] fn as_raw_StereoBM(&self) -> *mut c_void;
fn get_pre_filter_type(&self) -> Result<i32> {
unsafe { sys::cv_StereoBM_getPreFilterType_const(self.as_raw_StereoBM()) }.into_result()
}
fn set_pre_filter_type(&mut self, pre_filter_type: i32) -> Result<()> {
unsafe { sys::cv_StereoBM_setPreFilterType_int(self.as_raw_StereoBM(), pre_filter_type) }.into_result()
}
fn get_pre_filter_size(&self) -> Result<i32> {
unsafe { sys::cv_StereoBM_getPreFilterSize_const(self.as_raw_StereoBM()) }.into_result()
}
fn set_pre_filter_size(&mut self, pre_filter_size: i32) -> Result<()> {
unsafe { sys::cv_StereoBM_setPreFilterSize_int(self.as_raw_StereoBM(), pre_filter_size) }.into_result()
}
fn get_pre_filter_cap(&self) -> Result<i32> {
unsafe { sys::cv_StereoBM_getPreFilterCap_const(self.as_raw_StereoBM()) }.into_result()
}
fn set_pre_filter_cap(&mut self, pre_filter_cap: i32) -> Result<()> {
unsafe { sys::cv_StereoBM_setPreFilterCap_int(self.as_raw_StereoBM(), pre_filter_cap) }.into_result()
}
fn get_texture_threshold(&self) -> Result<i32> {
unsafe { sys::cv_StereoBM_getTextureThreshold_const(self.as_raw_StereoBM()) }.into_result()
}
fn set_texture_threshold(&mut self, texture_threshold: i32) -> Result<()> {
unsafe { sys::cv_StereoBM_setTextureThreshold_int(self.as_raw_StereoBM(), texture_threshold) }.into_result()
}
fn get_uniqueness_ratio(&self) -> Result<i32> {
unsafe { sys::cv_StereoBM_getUniquenessRatio_const(self.as_raw_StereoBM()) }.into_result()
}
fn set_uniqueness_ratio(&mut self, uniqueness_ratio: i32) -> Result<()> {
unsafe { sys::cv_StereoBM_setUniquenessRatio_int(self.as_raw_StereoBM(), uniqueness_ratio) }.into_result()
}
fn get_smaller_block_size(&self) -> Result<i32> {
unsafe { sys::cv_StereoBM_getSmallerBlockSize_const(self.as_raw_StereoBM()) }.into_result()
}
fn set_smaller_block_size(&mut self, block_size: i32) -> Result<()> {
unsafe { sys::cv_StereoBM_setSmallerBlockSize_int(self.as_raw_StereoBM(), block_size) }.into_result()
}
fn get_roi1(&self) -> Result<core::Rect> {
unsafe { sys::cv_StereoBM_getROI1_const(self.as_raw_StereoBM()) }.into_result()
}
fn set_roi1(&mut self, roi1: core::Rect) -> Result<()> {
unsafe { sys::cv_StereoBM_setROI1_Rect(self.as_raw_StereoBM(), roi1) }.into_result()
}
fn get_roi2(&self) -> Result<core::Rect> {
unsafe { sys::cv_StereoBM_getROI2_const(self.as_raw_StereoBM()) }.into_result()
}
fn set_roi2(&mut self, roi2: core::Rect) -> Result<()> {
unsafe { sys::cv_StereoBM_setROI2_Rect(self.as_raw_StereoBM(), roi2) }.into_result()
}
}
impl dyn StereoBM + '_ {
/// Creates StereoBM object
///
/// ## Parameters
/// * numDisparities: the disparity search range. For each pixel algorithm will find the best
/// disparity from 0 (default minimum disparity) to numDisparities. The search range can then be
/// shifted by changing the minimum disparity.
/// * blockSize: the linear size of the blocks compared by the algorithm. The size should be odd
/// (as the block is centered at the current pixel). Larger block size implies smoother, though less
/// accurate disparity map. Smaller block size gives more detailed disparity map, but there is higher
/// chance for algorithm to find a wrong correspondence.
///
/// The function create StereoBM object. You can then call StereoBM::compute() to compute disparity for
/// a specific stereo pair.
///
/// ## C++ default parameters
/// * num_disparities: 0
/// * block_size: 21
pub fn create(num_disparities: i32, block_size: i32) -> Result<types::PtrOfStereoBM> {
unsafe { sys::cv_StereoBM_create_int_int(num_disparities, block_size) }.into_result().map(|ptr| types::PtrOfStereoBM { ptr })
}
}
// Generating impl for trait cv::StereoMatcher (trait)
/// The base class for stereo correspondence algorithms.
pub trait StereoMatcher: core::Algorithm {
#[inline(always)] fn as_raw_StereoMatcher(&self) -> *mut c_void;
/// Computes disparity map for the specified stereo pair
///
/// ## Parameters
/// * left: Left 8-bit single-channel image.
/// * right: Right image of the same size and the same type as the left one.
/// * disparity: Output disparity map. It has the same size as the input images. Some algorithms,
/// like StereoBM or StereoSGBM compute 16-bit fixed-point disparity map (where each disparity value
/// has 4 fractional bits), whereas other algorithms output 32-bit floating-point disparity map.
fn compute(&mut self, left: &dyn core::ToInputArray, right: &dyn core::ToInputArray, disparity: &mut dyn core::ToOutputArray) -> Result<()> {
input_array_arg!(left);
input_array_arg!(right);
output_array_arg!(disparity);
unsafe { sys::cv_StereoMatcher_compute__InputArray__InputArray__OutputArray(self.as_raw_StereoMatcher(), left.as_raw__InputArray(), right.as_raw__InputArray(), disparity.as_raw__OutputArray()) }.into_result()
}
fn get_min_disparity(&self) -> Result<i32> {
unsafe { sys::cv_StereoMatcher_getMinDisparity_const(self.as_raw_StereoMatcher()) }.into_result()
}
fn set_min_disparity(&mut self, min_disparity: i32) -> Result<()> {
unsafe { sys::cv_StereoMatcher_setMinDisparity_int(self.as_raw_StereoMatcher(), min_disparity) }.into_result()
}
fn get_num_disparities(&self) -> Result<i32> {
unsafe { sys::cv_StereoMatcher_getNumDisparities_const(self.as_raw_StereoMatcher()) }.into_result()
}
fn set_num_disparities(&mut self, num_disparities: i32) -> Result<()> {
unsafe { sys::cv_StereoMatcher_setNumDisparities_int(self.as_raw_StereoMatcher(), num_disparities) }.into_result()
}
fn get_block_size(&self) -> Result<i32> {
unsafe { sys::cv_StereoMatcher_getBlockSize_const(self.as_raw_StereoMatcher()) }.into_result()
}
fn set_block_size(&mut self, block_size: i32) -> Result<()> {
unsafe { sys::cv_StereoMatcher_setBlockSize_int(self.as_raw_StereoMatcher(), block_size) }.into_result()
}
fn get_speckle_window_size(&self) -> Result<i32> {
unsafe { sys::cv_StereoMatcher_getSpeckleWindowSize_const(self.as_raw_StereoMatcher()) }.into_result()
}
fn set_speckle_window_size(&mut self, speckle_window_size: i32) -> Result<()> {
unsafe { sys::cv_StereoMatcher_setSpeckleWindowSize_int(self.as_raw_StereoMatcher(), speckle_window_size) }.into_result()
}
fn get_speckle_range(&self) -> Result<i32> {
unsafe { sys::cv_StereoMatcher_getSpeckleRange_const(self.as_raw_StereoMatcher()) }.into_result()
}
fn set_speckle_range(&mut self, speckle_range: i32) -> Result<()> {
unsafe { sys::cv_StereoMatcher_setSpeckleRange_int(self.as_raw_StereoMatcher(), speckle_range) }.into_result()
}
fn get_disp12_max_diff(&self) -> Result<i32> {
unsafe { sys::cv_StereoMatcher_getDisp12MaxDiff_const(self.as_raw_StereoMatcher()) }.into_result()
}
fn set_disp12_max_diff(&mut self, disp12_max_diff: i32) -> Result<()> {
unsafe { sys::cv_StereoMatcher_setDisp12MaxDiff_int(self.as_raw_StereoMatcher(), disp12_max_diff) }.into_result()
}
}
// Generating impl for trait cv::StereoSGBM (trait)
/// The class implements the modified H. Hirschmuller algorithm [HH08](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_HH08) that differs from the original
/// one as follows:
///
/// * By default, the algorithm is single-pass, which means that you consider only 5 directions
/// instead of 8. Set mode=StereoSGBM::MODE_HH in createStereoSGBM to run the full variant of the
/// algorithm but beware that it may consume a lot of memory.
/// * The algorithm matches blocks, not individual pixels. Though, setting blockSize=1 reduces the
/// blocks to single pixels.
/// * Mutual information cost function is not implemented. Instead, a simpler Birchfield-Tomasi
/// sub-pixel metric from [BT98](https://docs.opencv.org/3.2.0/d0/de3/citelist.html#CITEREF_BT98) is used. Though, the color images are supported as well.
/// * Some pre- and post- processing steps from K. Konolige algorithm StereoBM are included, for
/// example: pre-filtering (StereoBM::PREFILTER_XSOBEL type) and post-filtering (uniqueness
/// check, quadratic interpolation and speckle filtering).
///
///
/// Note:
/// * (Python) An example illustrating the use of the StereoSGBM matching algorithm can be found
/// at opencv_source_code/samples/python/stereo_match.py
pub trait StereoSGBM: crate::calib3d::StereoMatcher {
#[inline(always)] fn as_raw_StereoSGBM(&self) -> *mut c_void;
fn get_pre_filter_cap(&self) -> Result<i32> {
unsafe { sys::cv_StereoSGBM_getPreFilterCap_const(self.as_raw_StereoSGBM()) }.into_result()
}
fn set_pre_filter_cap(&mut self, pre_filter_cap: i32) -> Result<()> {
unsafe { sys::cv_StereoSGBM_setPreFilterCap_int(self.as_raw_StereoSGBM(), pre_filter_cap) }.into_result()
}
fn get_uniqueness_ratio(&self) -> Result<i32> {
unsafe { sys::cv_StereoSGBM_getUniquenessRatio_const(self.as_raw_StereoSGBM()) }.into_result()
}
fn set_uniqueness_ratio(&mut self, uniqueness_ratio: i32) -> Result<()> {
unsafe { sys::cv_StereoSGBM_setUniquenessRatio_int(self.as_raw_StereoSGBM(), uniqueness_ratio) }.into_result()
}
fn get_p1(&self) -> Result<i32> {
unsafe { sys::cv_StereoSGBM_getP1_const(self.as_raw_StereoSGBM()) }.into_result()
}
fn set_p1(&mut self, p1: i32) -> Result<()> {
unsafe { sys::cv_StereoSGBM_setP1_int(self.as_raw_StereoSGBM(), p1) }.into_result()
}
fn get_p2(&self) -> Result<i32> {
unsafe { sys::cv_StereoSGBM_getP2_const(self.as_raw_StereoSGBM()) }.into_result()
}
fn set_p2(&mut self, p2: i32) -> Result<()> {
unsafe { sys::cv_StereoSGBM_setP2_int(self.as_raw_StereoSGBM(), p2) }.into_result()
}
fn get_mode(&self) -> Result<i32> {
unsafe { sys::cv_StereoSGBM_getMode_const(self.as_raw_StereoSGBM()) }.into_result()
}
fn set_mode(&mut self, mode: i32) -> Result<()> {
unsafe { sys::cv_StereoSGBM_setMode_int(self.as_raw_StereoSGBM(), mode) }.into_result()
}
}
impl dyn StereoSGBM + '_ {
/// Creates StereoSGBM object
///
/// ## Parameters
/// * minDisparity: Minimum possible disparity value. Normally, it is zero but sometimes
/// rectification algorithms can shift images, so this parameter needs to be adjusted accordingly.
/// * numDisparities: Maximum disparity minus minimum disparity. The value is always greater than
/// zero. In the current implementation, this parameter must be divisible by 16.
/// * blockSize: Matched block size. It must be an odd number \>=1 . Normally, it should be
/// somewhere in the 3..11 range.
/// * P1: The first parameter controlling the disparity smoothness. See below.
/// * P2: The second parameter controlling the disparity smoothness. The larger the values are,
/// the smoother the disparity is. P1 is the penalty on the disparity change by plus or minus 1
/// between neighbor pixels. P2 is the penalty on the disparity change by more than 1 between neighbor
/// pixels. The algorithm requires P2 \> P1 . See stereo_match.cpp sample where some reasonably good
/// P1 and P2 values are shown (like 8\*number_of_image_channels\*SADWindowSize\*SADWindowSize and
/// 32\*number_of_image_channels\*SADWindowSize\*SADWindowSize , respectively).
/// * disp12MaxDiff: Maximum allowed difference (in integer pixel units) in the left-right
/// disparity check. Set it to a non-positive value to disable the check.
/// * preFilterCap: Truncation value for the prefiltered image pixels. The algorithm first
/// computes x-derivative at each pixel and clips its value by [-preFilterCap, preFilterCap] interval.
/// The result values are passed to the Birchfield-Tomasi pixel cost function.
/// * uniquenessRatio: Margin in percentage by which the best (minimum) computed cost function
/// value should "win" the second best value to consider the found match correct. Normally, a value
/// within the 5-15 range is good enough.
/// * speckleWindowSize: Maximum size of smooth disparity regions to consider their noise speckles
/// and invalidate. Set it to 0 to disable speckle filtering. Otherwise, set it somewhere in the
/// 50-200 range.
/// * speckleRange: Maximum disparity variation within each connected component. If you do speckle
/// filtering, set the parameter to a positive value, it will be implicitly multiplied by 16.
/// Normally, 1 or 2 is good enough.
/// * mode: Set it to StereoSGBM::MODE_HH to run the full-scale two-pass dynamic programming
/// algorithm. It will consume O(W\*H\*numDisparities) bytes, which is large for 640x480 stereo and
/// huge for HD-size pictures. By default, it is set to false .
///
/// The first constructor initializes StereoSGBM with all the default parameters. So, you only have to
/// set StereoSGBM::numDisparities at minimum. The second constructor enables you to set each parameter
/// to a custom value.
///
/// ## C++ default parameters
/// * p1: 0
/// * p2: 0
/// * disp12_max_diff: 0
/// * pre_filter_cap: 0
/// * uniqueness_ratio: 0
/// * speckle_window_size: 0
/// * speckle_range: 0
/// * mode: StereoSGBM::MODE_SGBM
pub fn create(min_disparity: i32, num_disparities: i32, block_size: i32, p1: i32, p2: i32, disp12_max_diff: i32, pre_filter_cap: i32, uniqueness_ratio: i32, speckle_window_size: i32, speckle_range: i32, mode: i32) -> Result<types::PtrOfStereoSGBM> {
unsafe { sys::cv_StereoSGBM_create_int_int_int_int_int_int_int_int_int_int_int(min_disparity, num_disparities, block_size, p1, p2, disp12_max_diff, pre_filter_cap, uniqueness_ratio, speckle_window_size, speckle_range, mode) }.into_result().map(|ptr| types::PtrOfStereoSGBM { ptr })
}
}
pub const StereoMatcher_DISP_SCALE: i32 = 0x10; // 16