<html>
<head>
<title>HostMot2 Encoder</title>
</head>
<body>
<center>
<table width=1000 cellpadding=10 border=1>
<tr>
<td>
<p>Velocity estimation is made possible by a cool feature
of the HostMot2 firmware:
<p>The FPGA synthesizes a configurable-frequency "timestamp
clock" by dividing ClockLow by the value in the Quadrature
Counter Timestamp Divider Register. ClockLow is 33 MHz on
the PCI cards and 50 MHz on the 7i43.
<p>The current value of the Timestamp Clock can be read from
the 16-bit Timestamp Count (TSC) register.
<p>When a quadrature counter instance in the HostMot2 FPGA
detects a transition in its input Gray code, it increments
the count and latches both the (16-bit) count and the 16
bits of the timestamp clock into the Counter Register.
</td>
</tr>
<tr>
<td colspan=2>
<p>Some Random Notes:
<ul>
<li><p>The encoder Count & Time ("C&T") are both 16-bit
registers, which are latched and read together.
<li><p>The encoder Count is initialized to 0 at firmware
load time.
<li><p>The Timestamp clock runs at 1 MHz (can run
faster, but 1 meg is pretty fast and makes it easy to
think about).
<li><p>The Timestamp Counter is 16 bits wide. It rolls
over about every 65 milliseconds.
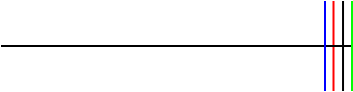
<li><p>In the timing pics below i'm using a very
slow servo loop of about 50 Hz. The interval between
reading the C&T register and the TSC register is also
rediculously large.
</ul>
</td>
</tr>
</table>
<br>
<hr>
<br>
<table width=1000 cellpadding=10 border=1>
<tr>
<td>
<p>The velocity estimator used by the driver is similar
to one described by David Auslander in a paper titled "<a
href="http://repositories.cdlib.org/its/path/reports/UCB-ITS-PRR-95-3/">
Vehicle-based Control Computer Systems</a>" (UCB ITS PRR
95 3).
</td>
</tr>
<tr>
<td align=left valign=middle>
<p>Algorithm notes:
<ol>
<li>
<p>The algorithm maintains some internal state.
<ul>
<li>
<p>Current-Motion-Mode: Stopped or Moving.
<ul>
<li><p><b>Stopped</b> means V=0 and there
is no known previous datapoint. This is
the starting state. If a new datapoint
comes while we're in the Stopped state,
we record the datapoint as the "old"
datapoint and move to the Moving state.
<li><p><b>Moving</b> means there is a
record of a recent previous datapoint
(Counts and Timestamp). If we're in
the Moving state and no new datapoint
is seen for some runtime-configurable
amount of time (250 ms or so perhaps),
the algorithm forgets the old datapoint
and moves to the Stopped state.
</ul>
<li>
<p>Old datapoint: (Count, Timestamp) datapoint
of most recently seen encoder edge.
<p>Only valid when Current Motion Mode
is Moving.
<p>The count is the raw 16-bit count from
the firmware, extended to signed 32-bit.
In other words, the count in the datapoint
has been adjusted for rollover (both positive
and negative).
<p>The timestamp is the raw timestamp of
that edge. Time has <b>not</b> been adjusted
for rollovers, that's handled elsewhere.
<li>
<p>R: The timestamp rollover counter.
<p>Only valid when Current Motion Mode
is Moving.
<p>This is the number of times the timestamp
clock has rolled over its 16-bit counter
since the "old" datapoint.
<li>
<p>Previous Time of Interest: This is a
relevant timestamp from the <b>previous</b>
time through the loop. (Described in the
section on Rollover Detection below).
<p>Only valid when Motion Mode
is Moving.
<p>Think of this as "the time up through
which we've tracked TSC rollovers so far".
</ul>
<li>
<p>On startup, the Current Motion Mode is set
to Stopped, so Old Datapoint, R, and PTI are all
dont-cares.
<li>
<p>If the Motion Mode is Stopped and <b>no</b>
new datapoint comes in: Nothing to do, return.
<li>
<p>If the Motion Mode is Stopped and a new datapoint comes in:
<ul>
<li>Set Old Datapoint to the new datapoint.
<li>Set R to 0.
<li>Set PTI to the new datapoint's timestamp.
<li>Set Motion Mode = Moving.
<li>Leave V at 0 for now.
<li>Finished!
</ul>
<li>
<p>Motion Mode is Moving, <b>no</b> new datapoint
available:
<ul>
<li>TI = TSC, check for rollover.
<li>dT is ((TI - ODT) + (R * 2^16))
<li>dT > Horizon? If so V = 0 and MM = Stopped.
<li>Still waiting: use UBVE
<li>PTI = TI
</ul>
<li>
<p>Motion Mode is Moving, new datapoint comes in:
<ul>
<li>TI = T, check for rollover
<li>dT is ((TI - ODT) + (R * 2^16))
<li>R = 0
<li>Use RTVE
<li>Old Datapoint = new datapoint.
<li>PTI = TI
</ul>
<li><p>Rollover detection:
<ul>
<li><p>Rollover detection happens right after
reading the registers, before doing anything else.
<li><p>If there was a new datapoint, the <i>Time
of Interest</i> Ti is the datapoint's timestamp.
<li><p>If there was <b>no</b> new datapoint,
Ti is the TSC.
<li><p>If Ti > 2^15, rollover detection reports
no rollover, records prevTi=Ti, and it's done.
<li><p>If Ti > prevTi, rollover detection
reports no rollover, records prevTi=Ti, and
it's done.
<li><p>If we get here, it's a rollover!
Increment rollover count R.
</ul>
<li>
<p>Relative Time Velocity Estimator (RTVE):
<p>Used when the C&T read indicates a new datapoint n
(in addition to having an old datapoint m).
<p>V = dS/dT = (Cn-Cm) / ((Tn-Tm) + (R*2^16))
<p>Reset R to 0.
<li>
<p>Upper Bound Velocity Estimator (UBVE):
<p>Used when the C&T read indicates no new datapoint.
<p>So make one up (n), using the previous datapoint
m and the current TSC: (Cn=Cm+1, Tn=TSCn). The Cm+1
is + or - 1 to be in the same direction as Vm
<p>V = dS/dT = (Cn-Cm) / ((Tn-Tm) + (R*2^16))
<p>There was no real datapoint, so we didn't use up
our rollovers, so we don't reset R to 0.
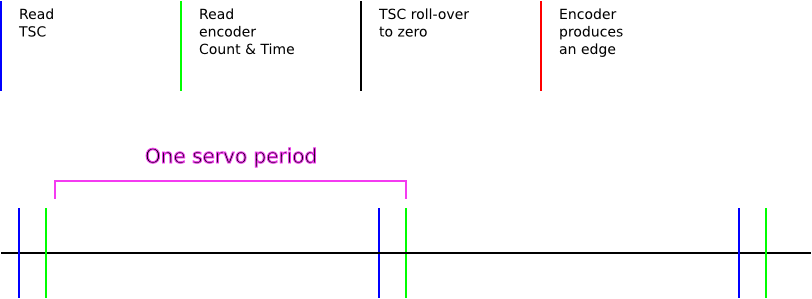
<li>
<p>Timestamp clock speed and servo period are
constrained together. C shows nearly a worst-case
scenario: edge comes just after the C&T read at 2,
gets picked up at 3, then we need to detect rollover
at 4.
<p>The servo frequency must be fast enough that Ti
has time to switch from an old datapoint-T to a TSC
before the rollover. Two servo periods must be less
than half the rollover time.
</ol>
</td>
</tr>
</table>
<br>
<table width=1000 cellpadding=10 border=1>
<tr>
<td>
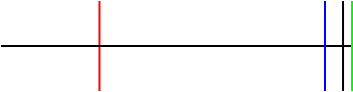
<p>Legend:
</td>
<td align=center valign=middle>
<img src="legend.png">
</td>
</tr>
</table>
<br>
<table width=1000 cellpadding=10 border=1>
<tr>
<td align=center valign=middle>
<p>
</td>
<td align=center valign=middle>
<p>1. No encoder edge
</td>
<td align=center valign=middle>
<p>2. Encoder edge before TSC read
</td>
<td align=center valign=middle>
<p>3. Encoder edge between TSC read and C&T read
</td>
</tr>
<tr>
<td>
<p>A. No rollover
</td>
<td align=center valign=middle>
<img src="case-a1.png">
</td>
<td align=center valign=middle>
<img src="case-a2.png">
</td>
<td align=center valign=middle>
<img src="case-a3.png">
</td>
</tr>
<tr>
<td>
<p>B. Rollover happens first
</td>
<td align=center valign=middle>
<img src="case-b1.png">
</td>
<td align=center valign=middle>
<img src="case-b2.png">
</td>
<td align=center valign=middle>
<img src="case-b3.png">
</td>
</tr>
<tr>
<td>
<p>C. Rollover happens second
</td>
<td align=center valign=middle>
<img src="case-c1.png">
</td>
<td align=center valign=middle>
<img src="case-c2.png">
</td>
<td align=center valign=middle>
<img src="case-c3.png">
</td>
</tr>
<tr>
<td>
<p>D. Rollover happens third
</td>
<td align=center valign=middle>
<p>There is no Case D1
</td>
<td align=center valign=middle>
<img src="case-d2.png">
</td>
<td align=center valign=middle>
<img src="case-d3.png">
</td>
</tr>
</table>
<br>
<hr>
<br>
<table width=1000 cellpadding=10 border=1>
<tr>
<td>
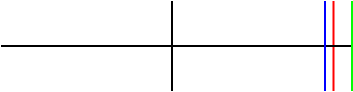
<p>Case A1: No rollover, no encoder edge.
</td>
<td align=center valign=middle>
<img src="case-a1.png">
</td>
</tr>
<tr>
<td align=left valign=middle><p>MM = Stopped</td>
<td>
<p>Nothing to do.
</td>
</tr>
<tr>
<td><p>MM = Moving</td>
<td>
<p>TI is TSC. Do rollover check. We detect rollover here if
PTI was pre-rollover, which means the previous time through
the loop was case C1 or C2 or D2 or D3.
<p>dT is ((TI - OT) + (R * 2^16)). dT > Horizon? If so V =
0 and MM = Stopped.
<p>We'll wait a little longer, Use UBVE.
<p>PTI gets the value of TI (TSC).
</td>
</tr>
</table>
<br>
<table width=1000 cellpadding=10 border=1>
<tr>
<td>
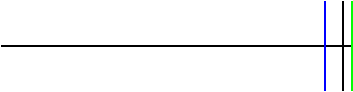
<p>Case A2: No rollover, encoder edge before TSC read.
</td>
<td align=center valign=middle>
<img src="case-a2.png">
</td>
</tr>
<tr>
<td align=left valign=middle><p>MM = Stopped</td>
<td>
<p>Old Datapoint = new datapoint
<p>R = 0
<p>MM = Moving
<p>PTI = T
</td>
</tr>
<tr>
<td><p>MM = Moving</td>
<td>
<p>TI = T, do rollover detection. We detect rollover here
if PTI was pre-rollover.
<p>Use RTVE.
<p>OD = new datapoint
<p>PTI = TI (= T)
</td>
</tr>
</table>
<br>
<table width=1000 cellpadding=10 border=1>
<tr>
<td>
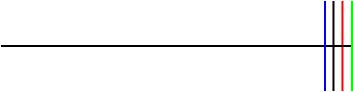
<p>Case A3: No rollover, encoder edge between TSC read and C&T read.
</td>
<td align=center valign=middle>
<img src="case-a3.png">
</td>
</tr>
<tr>
<td colspan=2 align=left valign=middle>
<p>Identical to A2.
</td>
</tr>
</table>
<br>
<table width=1000 cellpadding=10 border=1>
<tr>
<td>
<p>Case B1: Rollover happens first, no encoder edge
</td>
<td align=center valign=middle>
<img src="case-b1.png">
</td>
</tr>
<tr>
<td align=left valign=middle><p>MM = Stopped</td>
<td align=left valign=middle>
<p>Nothing happens.
</td>
</tr>
<tr>
<td align=left valign=middle><p>MM = Moving</td>
<td align=left valign=middle>
<p>TI = TSC. Check for rollover. Rollover detected, because
PTI is either T or TSC from the previous servo loop, which
ended just before the rollover.
<p>Compute dT, check for Stop.
<p>Use UBVE.
<p>PTI = TI (= TSC)
</td>
</tr>
</table>
<br>
<table width=1000 cellpadding=10 border=1>
<tr>
<td>
<p>Case B2: Rollover happens first, encoder edge before TSC read.
</td>
<td align=center valign=middle>
<img src="case-b2.png">
</td>
</tr>
<tr>
<td align=left valign=middle><p>MM = Stopped</td>
<td align=left valign=middle>
<p>Identical to A2.
</td>
</tr>
<tr>
<td align=left valign=middle><p>MM = Moving</td>
<td align=left valign=middle>
<p>TI = T, check for rollover, rollover detected, because
PTI is either T or TSC from the previous servo loop, which
ended just before the rollover.
<p>RTVE
<p>PTI = TI (= T)
</td>
</tr>
</table>
<br>
<table width=1000 cellpadding=10 border=1>
<tr>
<td>
<p>Case B3: Rollover happens first, encoder edge between TSC read and C&T read
</td>
<td align=center valign=middle>
<img src="case-b3.png">
</td>
</tr>
<tr>
<td colspan=2 align=left valign=middle>
<p>Identical to B2
</td>
</tr>
</table>
<br>
<table width=1000 cellpadding=10 border=1>
<tr>
<td>
<p>Case C1: Rollover happens second, no encoder edge
</td>
<td align=center valign=middle>
<img src="case-c1.png">
</td>
</tr>
<tr>
<td align=left valign=middle><p>MM = Stopped</td>
<td align=left valign=middle>
<p>Nothing to do.
</td>
</tr>
<tr>
<td align=left valign=middle><p>MM = Moving</td>
<td align=left valign=middle>
<p>TI = TSC, check for rollover, no rollover detected
(because TSC is just before the rollover).
<p>UBVE
<p>PTI = TI (= TSC)
</td>
</tr>
</table>
<br>
<table width=1000 cellpadding=10 border=1>
<tr>
<td>
<p>Case C2: Rollover happens second, encoder edge before TSC read.
</td>
<td align=center valign=middle>
<img src="case-c2.png">
</td>
</tr>
<tr>
<td align=left valign=middle><p>MM = Stopped</td>
<td align=left valign=middle>
<p>Like A2.
</td>
</tr>
<tr>
<td align=left valign=middle><p>MM = Moving</td>
<td align=left valign=middle>
<p>TI = T, check for rollover, no rollover detected
(because T is just before the rollover).
<p>RTVE
<p>PTI = TI (= T)
</td>
</tr>
</table>
<br>
<table width=1000 cellpadding=10 border=1>
<tr>
<td>
<p>Case C3: Rollover happens second, encoder edge between TSC read and C&T read
</td>
<td align=center valign=middle>
<img src="case-c3.png">
</td>
</tr>
<tr>
<td colspan=2 align=left valign=middle>
<p>Identical to B2 and B3.
</td>
</tr>
</table>
<br>
<table width=1000 cellpadding=10 border=1>
<tr>
<td>
<p>Case D2: Rollover happens third, encoder edge before TSC read.
</td>
<td align=center valign=middle>
<img src="case-d2.png">
</td>
</tr>
<tr>
<td align=left valign=middle><p>MM = Stopped</td>
<td align=left valign=middle>
<p>Like A2.
</td>
</tr>
<tr>
<td align=left valign=middle><p>MM = Moving</td>
<td align=left valign=middle>
<p>TI = T, check for rollover, no rollover detected
(because T is just before the rollover).
<p>RTVE
<p>PTI = TI (= T)
</td>
</tr>
</table>
<br>
<table width=1000 cellpadding=10 border=1>
<tr>
<td>
<p>Case D3: Rollover happens third, encoder edge between TSC read and C&T read.
</td>
<td align=center valign=middle>
<img src="case-d3.png">
</td>
</tr>
<tr>
<td colspan=2 align=left valign=middle>
<p>Identical to D2.
</td>
</tr>
</table>
<br>
<hr>
<br>
</center>
</body>
</html>
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}