# CLAUDE.md
This file provides guidance to Claude Code (claude.ai/code) when working with code in this repository.
## Project Overview
Cloudini is a high-performance pointcloud compression library with bindings for ROS, PCL, and WebAssembly. It implements a two-stage compression approach: custom encoding for pointcloud fields followed by general-purpose compression (LZ4/ZSTD).
## Architecture
The project consists of three main components:
- **cloudini_lib/**: Core compression library (C++20) with field encoders/decoders
- **cloudini_ros/**: ROS2 integration with point_cloud_transport plugins and conversion utilities
- **cloudini_web/**: WebAssembly interface for browser-based compression
### Core Library (cloudini_lib)
Key components:
- **PointcloudEncoder**: Multi-threaded encoder with double-buffering pattern for LZ4/ZSTD compression
- **PointcloudDecoder**: Decoder supporting chunked decompression
- **Field Encoders/Decoders**: Type-specific encoders for efficient field compression
- `FieldEncoderFloatN_Lossy`: SIMD-optimized encoder for 3-4 consecutive FLOAT32 fields (typically XYZ/XYZRGB)
- `FieldEncoderInt`: Delta + varint encoding for integer types
- `FieldEncoderFloat_XOR`: XOR-based lossless float compression
- `FieldEncoderCopy`: Pass-through for unsupported types
**Threading Model**:
- Encoder uses a worker thread (`compressionWorker()`) for LZ4/ZSTD compression
- Double-buffering pattern: main thread encodes fields while worker compresses previous chunk
- Condition variables `cv_ready_to_compress_` and `cv_done_compressing_` coordinate work
- **CRITICAL**: All shared state modifications (`compression_done_`, `compressed_size_`) MUST be protected by `mutex_`
### ROS2 Integration (cloudini_ros)
**Key Classes**:
1. **CloudiniSubscriberPCL** (`cloudini_ros/include/cloudini_ros/cloudini_subscriber_pcl.hpp`)
- High-performance subscriber that converts CompressedPointCloud2 directly to `pcl::PCLPointCloud2`
- Uses `rclcpp::GenericSubscription` for zero-copy raw DDS message access
- Implements object pool pattern (max 4 objects) to avoid repeated allocations
- Thread-safe with mutex-protected pool
- Bypasses intermediate `sensor_msgs::PointCloud2` conversion
2. **Topic Converter Node** (`cloudini_ros/src/topic_converter.cpp`)
- Converts between `sensor_msgs/PointCloud2` and `point_cloud_interfaces/CompressedPointCloud2`
- Supports both compression and decompression modes
- Optimizations:
- Skips processing when `get_subscription_count() == 0`
- Auto-detects publisher QoS settings via `adapt_request_to_offers()`
- Zero-copy via raw DDS message manipulation
3. **Point Cloud Transport Plugin** (`cloudini_ros/src/cloudini_publisher_plugin.cpp`)
- Integrates with ROS2 `point_cloud_transport` framework (similar to `image_transport`)
- Automatically creates compressed topic variants (e.g., `/points/cloudini`)
- Configurable via transport hints: `TransportHints("cloudini")`
**Message Parsing Utilities** (`cloudini_lib/include/cloudini_lib/ros_msg_utils.hpp`):
- `getDeserializedPointCloudMessage()`: Parse raw DDS messages without full deserialization
- `convertPointCloud2ToCompressedCloud()`: Convert + compress in single pass
- `convertCompressedCloudToPointCloud2()`: Decompress + convert
- `toEncodingInfo()`: Extract encoding metadata from point cloud
**PCL Integration** (`cloudini_lib/include/cloudini_lib/pcl_conversion.hpp`):
- `PCLPointCloudEncode()`: Encode `pcl::PCLPointCloud2` to Cloudini format
- `PCLPointCloudDecode()`: Decode Cloudini format to `pcl::PCLPointCloud2`
- Direct conversion without intermediate ROS message types
## Build Commands
### Core Library (Standalone)
```bash
cmake -B build_release -S cloudini_lib -DCMAKE_BUILD_TYPE=Release
cmake --build build_release --parallel
```
### Debug Build with Sanitizers
```bash
cmake -B build_debug -S cloudini_lib -DCMAKE_BUILD_TYPE=Debug
cmake --build build_debug --parallel
```
### ROS Build
```bash
colcon build --packages-select cloudini_lib cloudini_ros
```
### WebAssembly Build
```bash
# Requires Emscripten
cmake -B build_wasm -S cloudini_lib -DCMAKE_TOOLCHAIN_FILE=$EMSDK/upstream/emscripten/cmake/Modules/Platform/Emscripten.cmake
cmake --build build_wasm
```
### Web Interface
```bash
cd cloudini_web
npm install
npm run dev # Development server
npm run build # Production build
```
## Testing
### Core Library Tests
```bash
# Core library tests
cd build_debug && ctest
# Run specific benchmark
./build_release/benchmarks/pcd_benchmark
```
### ROS2 Test Nodes
**Test Publisher** (`cloudini_ros/test/test_plugin_publisher.cpp`):
```bash
ros2 run cloudini_ros test_plugin_publisher --ros-args -p input_topic:=/points -p output_topic:=/points_pct
```
- Subscribes to standard PointCloud2 topic
- Publishes via `point_cloud_transport`, automatically creating compressed variants
- Creates topics: `/points_pct` (raw) and `/points_pct/cloudini` (compressed)
**Test Subscriber** (`cloudini_ros/test/test_plugin_subscriber.cpp`):
```bash
ros2 run cloudini_ros test_plugin_subscriber --ros-args -p topic:=/points_pct
```
- Uses `point_cloud_transport` to subscribe with transport hint "cloudini"
- Manually converts to PCL format in callback
**Direct PCL Subscriber** (`cloudini_ros/test/test_cloudini_subscriber.cpp`):
```bash
ros2 run cloudini_ros test_cloudini_subscriber --ros-args -p topic:=/points/cloudini
```
- Uses `CloudiniSubscriberPCL` for most efficient direct PCL conversion
- Bypasses `point_cloud_transport` framework for minimal overhead
**Topic Converter**:
```bash
# Compress: sensor_msgs/PointCloud2 -> CompressedPointCloud2
ros2 run cloudini_ros cloudini_topic_converter --ros-args \
-p compressing:=true \
-p topic_input:=/points \
-p topic_output:=/points/compressed \
-p resolution:=0.001
# Decompress: CompressedPointCloud2 -> sensor_msgs/PointCloud2
ros2 run cloudini_ros cloudini_topic_converter --ros-args \
-p compressing:=false \
-p topic_input:=/points/compressed \
-p topic_output:=/points/decompressed
```
**Direct Compression Publisher** (`cloudini_ros/test/test_direct_publisher.cpp`):
```bash
ros2 run cloudini_ros test_direct_publisher --ros-args \
-p input_topic:=/points \
-p output_topic:=/points/compressed \
-p resolution:=0.001
```
- Compresses PointCloud2 directly using `SerializeCompressedPointCloud2`
- Publishes as serialized `CompressedPointCloud2` via generic publisher
- No topic_converter node needed
### Benchmarking
**MCAP Rosbag Conversion**:
```bash
# Convert a ROS2 bag directory (creates <bag_dir>_encoded/ with .mcap + metadata.yaml)
./build_release/tools/cloudini_rosbag_converter -c -y -f DATA/my_bag/
# Convert a bare .mcap file (if sibling metadata.yaml exists, it is also transformed)
./build_release/tools/cloudini_rosbag_converter -c -y -f DATA/my_bag/my_bag_0.mcap
# Decode back to PointCloud2
./build_release/tools/cloudini_rosbag_converter -d -y -f DATA/my_bag_encoded/
```
### Debugging with ROS2 CLI
```bash
# List available topics
ros2 topic list
# Check topic type
ros2 topic info /points/cloudini
# Monitor message rate
ros2 topic hz /points/cloudini
# Echo messages (won't work for compressed - binary data)
ros2 topic echo /points
```
## Key Dependencies
- **Required**: CMake 3.16+, C++20 compiler
- **Auto-downloaded via CPM**: LZ4, ZSTD, cxxopts, benchmark, googletest
- **Optional**: PCL (for pointcloud utilities), ROS 2 (for integration)
- **Web**: Node.js 18+, Vite
- **ROS2 Packages**:
- `rclcpp` - Core ROS2 C++ API
- `sensor_msgs` - Standard PointCloud2 messages
- `point_cloud_interfaces` - CompressedPointCloud2 message definition
- `point_cloud_transport` - Transport framework for point cloud plugins
- `pcl_conversions` - PCL/ROS message conversion utilities (apt: `ros-${ROS_DISTRO}-pcl-conversions`)
- `pluginlib` - Plugin loading framework
## API Usage Patterns
### Using CloudiniSubscriberPCL (Most Efficient)
```cpp
#include <cloudini_ros/cloudini_subscriber_pcl.hpp>
auto node = std::make_shared<rclcpp::Node>("my_node");
// Create subscriber with callback
auto subscriber = std::make_shared<cloudini_ros::CloudiniSubscriberPCL>(
node, // Can also use node->shared_from_this() if inside node class
"/points/cloudini", // Topic name
[](const pcl::PCLPointCloud2::Ptr& cloud) {
// Process PCL cloud - object is from pool, will be returned when lambda exits
std::cout << "Received cloud with " << cloud->width * cloud->height << " points\n";
},
rclcpp::QoS(10) // Optional QoS settings
);
rclcpp::spin(node);
```
**IMPORTANT**: Do NOT call `shared_from_this()` in node constructors - use raw `this` pointer instead, or call from `init()` method after node construction.
### Using Point Cloud Transport
```cpp
#include <point_cloud_transport/point_cloud_transport.hpp>
// Publisher side
auto pct = std::make_shared<point_cloud_transport::PointCloudTransport>(node);
auto pub = pct->advertise("/points", 10);
// Automatically creates /points/cloudini compressed topic
pub.publish(cloud_msg);
// Subscriber side with transport hint
auto transport_hint = std::make_shared<point_cloud_transport::TransportHints>("cloudini");
auto sub = pct->subscribe("/points", 10, callback, {}, transport_hint.get());
```
### Raw DDS Message Access Pattern
```cpp
#include <rclcpp/generic_subscription.hpp>
#include <cloudini_lib/ros_msg_utils.hpp>
// Generic subscription for zero-copy access
auto callback = [](std::shared_ptr<rclcpp::SerializedMessage> msg) {
const auto& input_msg = msg->get_rcl_serialized_message();
const Cloudini::ConstBufferView raw_dds_msg(input_msg.buffer, input_msg.buffer_length);
// Parse without full deserialization
auto pc_info = cloudini_ros::getDeserializedPointCloudMessage(raw_dds_msg);
// Process compressed data directly
// pc_info.data contains the cloudini-compressed payload
};
auto subscription = node->create_generic_subscription(
topic, "point_cloud_interfaces/msg/CompressedPointCloud2",
rclcpp::QoS(10), callback
);
```
### Resolution Configuration
```cpp
#include <cloudini_lib/ros_msg_utils.hpp>
// Create encoding info from PointCloud2
auto pc_info = cloudini_ros::getDeserializedPointCloudMessage(raw_msg);
auto encoding_info = cloudini_ros::toEncodingInfo(pc_info);
// Apply resolution profile (quantization for lossy compression)
cloudini_ros::applyResolutionProfile(
cloudini_ros::ResolutionProfile{}, // Default profile
encoding_info.fields,
0.001 // 1mm resolution
);
// Convert with custom encoding
std::vector<uint8_t> output;
cloudini_ros::convertPointCloud2ToCompressedCloud(pc_info, encoding_info, output);
```
### Direct Compression (Without Topic Converter)
```cpp
#include <cloudini_ros/conversion_utils.hpp>
#include <rclcpp/rclcpp.hpp>
// Setup: create a generic publisher for CompressedPointCloud2
auto publisher = node->create_generic_publisher(
"/points/compressed",
"point_cloud_interfaces/msg/CompressedPointCloud2",
rclcpp::QoS(10));
// Compress a PointCloud2 message
std::vector<uint8_t> buffer;
Cloudini::SerializeCompressedPointCloud2(pcd_msg, 0.001, buffer);
// Publish using zero-copy pointer swap
rclcpp::SerializedMessage ser_msg;
ser_msg.get_rcl_serialized_message().buffer = buffer.data();
ser_msg.get_rcl_serialized_message().buffer_length = buffer.size();
publisher->publish(ser_msg);
// NOTE: null out ser_msg buffer before destruction to prevent double-free
ser_msg.get_rcl_serialized_message().buffer = nullptr;
ser_msg.get_rcl_serialized_message().buffer_length = 0;
```
## Performance Optimization Patterns
### Object Pool Pattern (CloudiniSubscriberPCL)
CloudiniSubscriberPCL implements an object pool to avoid repeated PCL cloud allocations:
```cpp
pcl::PCLPointCloud2::Ptr CloudiniSubscriberPCL::acquireCloudFromPool() {
pcl::PCLPointCloud2* raw_ptr = nullptr;
{
std::lock_guard<std::mutex> lock(pool_mutex_);
if (!cloud_pool_.empty()) {
raw_ptr = cloud_pool_.back();
cloud_pool_.pop_back();
} else {
raw_ptr = new pcl::PCLPointCloud2();
}
}
// Custom deleter returns to pool
return pcl::PCLPointCloud2::Ptr(raw_ptr, [this](pcl::PCLPointCloud2* ptr) {
std::lock_guard<std::mutex> lock(pool_mutex_);
if (cloud_pool_.size() < MAX_POOL_SIZE) {
ptr->data.clear(); // Clear but keep capacity
ptr->fields.clear();
cloud_pool_.push_back(ptr);
} else {
delete ptr;
}
});
}
```
**Benefits**: ~75% reduction in allocations during steady-state operation.
### Skip Processing When No Subscribers
```cpp
void callback(std::shared_ptr<rclcpp::SerializedMessage> msg) {
// Skip expensive processing if no one is listening
if (publisher_->get_subscription_count() == 0) {
return;
}
// Proceed with compression/decompression
// ...
}
```
### Zero-Copy via Raw DDS Access
Instead of deserializing to `sensor_msgs::PointCloud2`, parse the raw DDS buffer:
```cpp
// AVOID THIS (requires full deserialization + copy):
void callback(const sensor_msgs::msg::PointCloud2::SharedPtr msg) {
auto pcl_cloud = std::make_shared<pcl::PCLPointCloud2>();
pcl_conversions::toPCL(*msg, *pcl_cloud);
// ...
}
// PREFER THIS (zero-copy):
void callback(std::shared_ptr<rclcpp::SerializedMessage> msg) {
const auto& raw = msg->get_rcl_serialized_message();
const Cloudini::ConstBufferView view(raw.buffer, raw.buffer_length);
auto pc_info = cloudini_ros::getDeserializedPointCloudMessage(view);
// Access fields directly from buffer without intermediate copies
}
```
## Development Notes
- Uses CPM for dependency management - set `CPM_SOURCE_CACHE` environment variable to avoid re-downloading
- Supports SSE4.1 optimizations on x86_64
- Address sanitizer enabled automatically in Debug builds on GCC/Clang
- Custom intrinsics for SIMD operations in `include/cloudini_lib/intrinsics.hpp`
- Field encoders support both lossy (quantized floats) and lossless compression modes
### Threading Safety Guidelines
**CRITICAL**: When modifying shared state accessed by multiple threads:
1. Always acquire mutex before modifying condition variable predicates
2. Release mutex before calling `notify_one()` or `notify_all()`
3. Use `std::lock_guard` for automatic RAII-style locking
Example from `PointcloudEncoder::compressionWorker()`:
```cpp
// CORRECT:
{
std::lock_guard<std::mutex> lock(mutex_);
compressed_size_ += chunk_size + sizeof(uint32_t);
compression_done_ = true;
}
cv_done_compressing_.notify_one(); // Notify after releasing lock
// WRONG - DATA RACE:
compressed_size_ += chunk_size; // No mutex!
compression_done_ = true; // Race condition!
cv_done_compressing_.notify_one();
```
### ROS2 Node Lifecycle Safety
**IMPORTANT**: Do NOT call `shared_from_this()` in constructors:
```cpp
// WRONG - crashes with bad_weak_ptr:
MyNode::MyNode() : Node("my_node") {
subscriber_ = std::make_shared<CloudiniSubscriberPCL>(
this->shared_from_this(), // BAD - shared_ptr not yet constructed
"/topic", callback
);
}
// CORRECT Option 1 - Use raw pointer:
MyNode::MyNode() : Node("my_node") {
subscriber_ = std::make_shared<CloudiniSubscriberPCL>(
this, // GOOD - raw pointer
"/topic", callback
);
}
// CORRECT Option 2 - Separate init():
MyNode::MyNode() : Node("my_node") {}
void MyNode::init() {
subscriber_ = std::make_shared<CloudiniSubscriberPCL>(
this->shared_from_this(), // GOOD - called after construction
"/topic", callback
);
}
```
## Common Issues and Fixes
### Issue: Timeout waiting for compression to complete
**Symptom**: Exception "Timeout waiting for compression to complete" during encoding.
**Cause**: Data race or lost notification in multi-threaded compression worker.
**Fix**: Ensure all modifications to `compression_done_` and `compressed_size_` are protected by mutex. Fixed in recent commit to `cloudini_lib/src/cloudini.cpp`.
### Issue: Point cloud transport subscriber not receiving messages
**Symptom**: Subscriber callback never fires despite topic being published.
**Cause**: Topic naming mismatch. Point cloud transport expects base topic name (e.g., `/points`), not the compressed variant (e.g., `/points/cloudini`).
**Solution**:
- Publisher: Use base topic name with `advertise("/points", 10)`
- Subscriber: Use base topic + transport hint `subscribe("/points", 10, callback, {}, TransportHints("cloudini"))`
### Issue: PCL conversions header not found
**Symptom**: Compilation error `pcl_conversions/pcl_conversions.h: No such file or directory`
**Solution**:
1. Install package: `sudo apt install ros-${ROS_DISTRO}-pcl-conversions`
2. Add to CMakeLists.txt:
```cmake
find_package(pcl_conversions REQUIRED)
target_link_libraries(target ${pcl_conversions_TARGETS})
```
3. Export in package.xml: `<depend>pcl_conversions</depend>`
### Issue: Generic subscription crashes with deserialization error
**Symptom**: Runtime crash when accessing serialized message buffer.
**Cause**: Incorrect topic type string or attempting to deserialize incompatible message.
**Solution**: Verify topic type matches exactly:
```bash
ros2 topic info /topic_name # Check actual type
```
Use correct type string:
- `"sensor_msgs/msg/PointCloud2"` (not `sensor_msgs::msg::PointCloud2`)
- `"point_cloud_interfaces/msg/CompressedPointCloud2"`
## Tools
- **cloudini_rosbag_converter**: Convert MCAP rosbags between compressed/uncompressed pointclouds. Accepts bag directories or bare `.mcap` files; generates a transformed `metadata.yaml` when one is present
- **mcap_cutter**: Extract portions of MCAP files
- **pcd_benchmark**: Benchmark compression on PCD files
- **run_encoder.sh**: Batch processing script for test data
## File Structure Reference
### cloudini_lib/
```
include/cloudini_lib/
├── cloudini.hpp # Core encoder/decoder classes
├── encoding_utils.hpp # Buffer views, encode/decode helpers
├── field_encoder.hpp # Field-specific encoder implementations
├── field_decoder.hpp # Field-specific decoder implementations
├── intrinsics.hpp # SIMD intrinsics wrappers (Vector4f, Vector4i)
├── pcl_conversion.hpp # PCL ↔ Cloudini conversion
└── ros_msg_utils.hpp # ROS2 message parsing/conversion utilities
src/
├── cloudini.cpp # PointcloudEncoder/Decoder implementation
├── field_encoder.cpp # Encoder implementations (FloatN, Int, XOR)
├── field_decoder.cpp # Decoder implementations
├── pcl_conversion.cpp # PCL integration
└── ros_msg_utils.cpp # ROS message utilities
tools/
├── cloudini_rosbag_converter # MCAP conversion tool
└── mcap_cutter # MCAP slicing utility
```
### cloudini_ros/
```
include/cloudini_ros/
└── cloudini_subscriber_pcl.hpp # High-performance PCL subscriber with object pool
src/
├── topic_converter.cpp # Standalone compression/decompression node
├── cloudini_subscriber_pcl.cpp # PCL subscriber implementation
├── cloudini_publisher_plugin.cpp # point_cloud_transport publisher plugin
└── cloudini_subscriber_plugin.cpp # point_cloud_transport subscriber plugin
test/
├── test_cloudini_subscriber.cpp # Direct CloudiniSubscriberPCL usage example
├── test_direct_publisher.cpp # Direct compression publisher example
├── test_plugin_publisher.cpp # point_cloud_transport publisher example
└── test_plugin_subscriber.cpp # point_cloud_transport subscriber example
```
## Quick Reference
### Compression Modes
1. **None** (`EncodingOptions::NONE` + `CompressionOption::NONE`)
- No encoding, no compression (for debugging)
2. **Lossless** (`EncodingOptions::LOSSLESS` + `CompressionOption::LZ4/ZSTD`)
- Delta encoding for integers
- XOR encoding for floats
- LZ4 or ZSTD compression
3. **Lossy** (`EncodingOptions::LOSSY` + `CompressionOption::LZ4/ZSTD`)
- Quantized floats based on resolution parameter
- SIMD-optimized for XYZ/XYZRGB fields
- Highest compression ratio
- Typical resolution: 0.001 (1mm) for geometry
### QoS Profile Auto-Detection
`topic_converter.cpp` uses `adapt_request_to_offers()` to auto-detect publisher QoS:
- **Reliability**: Uses RELIABLE if all publishers are RELIABLE, else BEST_EFFORT
- **Durability**: Uses TRANSIENT_LOCAL if all publishers are TRANSIENT_LOCAL (for latched topics), else VOLATILE
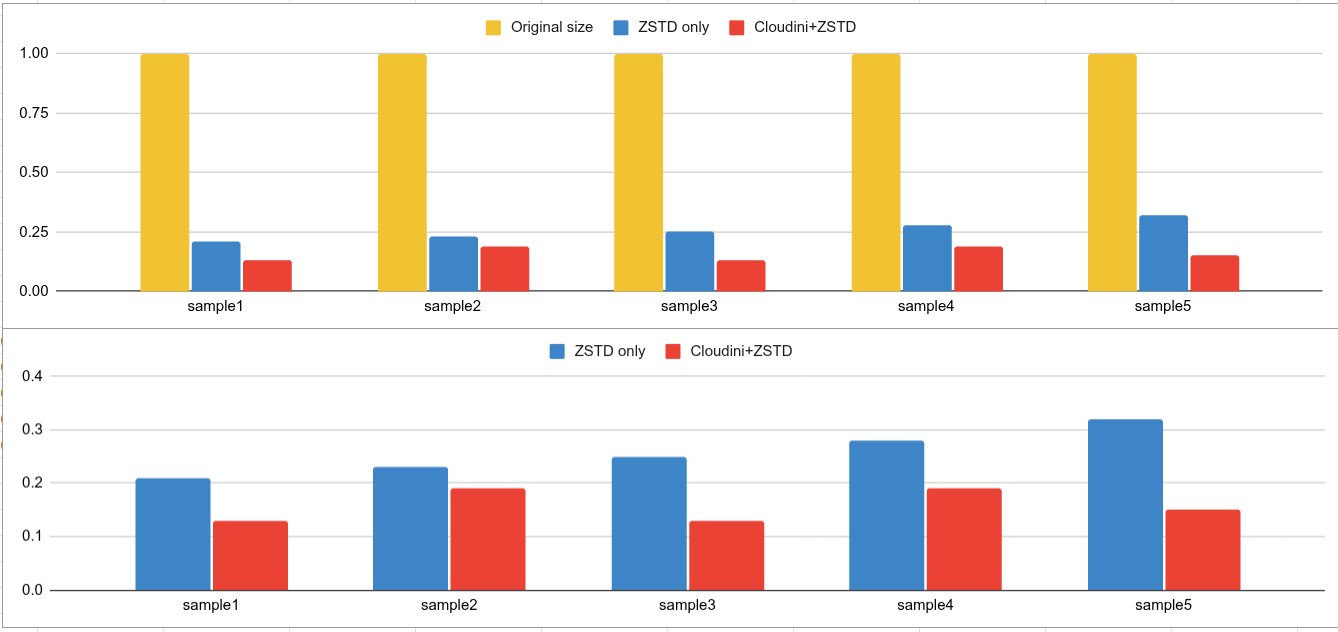
### Typical Compression Ratios
Based on empirical data:
- **Lossy (1mm resolution)**: 5-10x compression
- **Lossless**: 2-4x compression
- **Depends on**: Point cloud structure, field types, data entropy
### Message Flow Diagram
```
Standard ROS2 Workflow:
┌─────────────────┐
│ Sensor/Driver │
│ PointCloud2 │
└────────┬────────┘
│
▼
┌─────────────────┐ ┌──────────────────┐
│ point_cloud_ │─────▶│ cloudini plugin │
│ transport │ │ (compress) │
└─────────────────┘ └────────┬─────────┘
│
▼
┌─────────────────┐
│ Compressed │
│ PointCloud2 │
└────────┬────────┘
│
▼
┌─────────────────┐ ┌──────────────────┐
│ CloudiniSub │◀─────│ Generic Sub │
│ PCL (fastest) │ │ (zero-copy DDS) │
└─────────────────┘ └──────────────────┘
Alternative (Manual Conversion):
┌─────────────────┐
│ Sensor │
│ PointCloud2 │
└────────┬────────┘
│
▼
┌─────────────────┐
│ topic_converter │ (standalone node)
│ compressing=true│
└────────┬────────┘
│
▼
┌─────────────────┐
│ Compressed │
│ PointCloud2 │
└────────┬────────┘
│
▼
┌─────────────────┐
│ CloudiniSub │
│ PCL │
└─────────────────┘
```
## Performance Tips
1. **Use CloudiniSubscriberPCL for PCL workflows** - bypasses intermediate ROS conversions
2. **Enable intra-process comms** when publisher/subscriber in same process:
```cpp
rclcpp::NodeOptions options;
options.use_intra_process_comms(true);
auto node = std::make_shared<MyNode>(options);
```
3. **Set resolution based on needs**:
- Indoor robotics: 0.001 (1mm)
- Outdoor/autonomous driving: 0.01 (1cm)
- Architecture/mapping: 0.0001 (0.1mm)
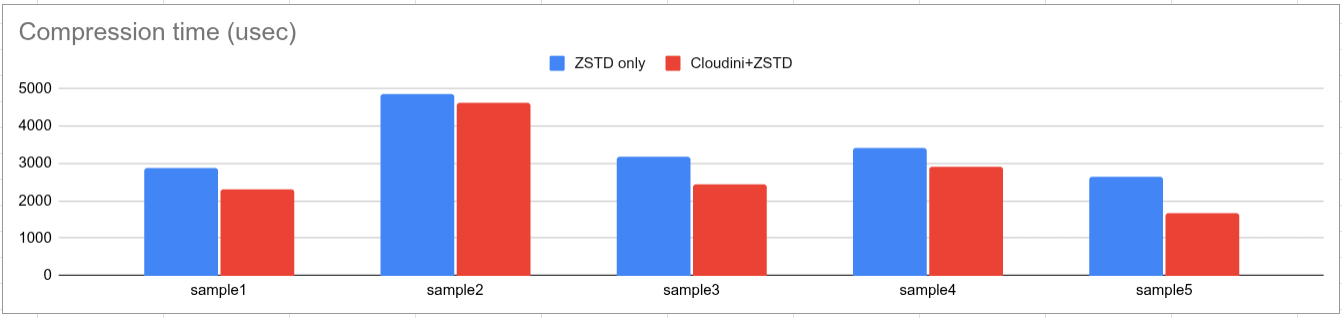
4. **Use ZSTD for maximum compression** (slower), **LZ4 for real-time** (faster)
5. **Monitor with** `ros2 topic hz` and `ros2 topic bw` to verify compression gains
## Recent Fixes (as of 2025)
- **Threading fix in PointcloudEncoder**: Protected `compression_done_` and `compressed_size_` with mutex to prevent data races and deadlocks
- **Object pool optimization**: Added to CloudiniSubscriberPCL for ~75% allocation reduction
- **Subscriber-aware processing**: topic_converter now skips processing when no subscribers present
- **QoS auto-detection**: topic_converter automatically adapts to publisher QoS settings
- **pcl_conversions linking**: Added to CMakeLists.txt for proper PCL integration
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}