//! **ARAEL** -- Algorithms for Robust Autonomy, Estimation, and Localization.
//!
//! Nonlinear optimization framework with compile-time symbolic differentiation.
//!
//! Define model structs with optimizable parameters, write constraints as
//! symbolic expressions, and the framework symbolically differentiates at
//! compile time, applies common subexpression elimination, and generates
//! compiled cost, gradient, and Gauss-Newton hessian (J^T J approximation)
//! code.
//!
//! # Features
//!
//! - **Symbolic math** -- expression trees with automatic differentiation,
//! simplification, LaTeX/Rust code generation (via `arael-sym`)
//! - **Compile-time constraint code generation** -- write constraints
//! symbolically, get compiled derivative code with CSE
//! - **Levenberg-Marquardt solver** -- with robust error suppression
//! via the [Starship method (US12346118)](https://patents.google.com/patent/US12346118)
//! `gamma * atan(r / gamma)` and switchable
//! constraints (`guard = expr`)
//! - **Multiple solver backends** via `LmSolver` trait:
//! - Dense Cholesky (nalgebra) -- fixed-size dispatch up to 9x9
//! - Band Cholesky -- pure Rust O(n*kd^2) for block-tridiagonal systems
//! - Sparse Cholesky (faer, pure Rust) -- for general sparse hessians
//! - Eigen SimplicialLLT and CHOLMOD (SuiteSparse) -- optional C++ backends via FFI
//! - LAPACK band -- optional dpbsv/spbsv backend
//! - **Indexed sparse assembly** -- precomputed position lists for
//! zero-overhead hessian assembly after first iteration
//! - **f32 and f64 precision** -- `#[arael(root)]` for f64,
//! `#[arael(root, f32)]` for f32 throughout
//! - **Model trait** -- hierarchical serialize/deserialize/update protocol
//! - **Type-safe references** -- `Ref<T>`, `Vec<T>`, `Deque<T>`, `Arena<T>`
//! - **Runtime differentiation** -- parse equations from strings at runtime,
//! auto-differentiate symbolically, and optimize via `ExtendedModel` +
//! `TripletBlock` (see `examples/runtime_fit_demo.rs`)
//! - **Hessian blocks** -- `SelfBlock<A>` and `CrossBlock<A, B>` for 1- and
//! 2-entity constraints (packed dense); `TripletBlock` for 3+ entities (COO sparse)
//! - **Jacobian computation** -- `#[arael(root, jacobian)]` generates
//! `calc_jacobian()` returning a sparse [`Jacobian<T>`](model::Jacobian)
//! matrix for DOF analysis via SVD.
//! [`#[arael(constraint_index)]`](model::JacobianRow) tracks constraint
//! provenance per row. See `examples/jacobian_demo.rs`.
//! - **Gimbal-lock-free rotations** -- `EulerAngleParam` optimizes a small
//! delta around a reference rotation matrix
//! - **WASM/browser support** -- compiles to WebAssembly; the `arael-sketch`
//! constraint editor runs in the browser via eframe/egui
//!
//! # Scope
//!
//! Arael is a **nonlinear optimization framework**, not a complete SLAM or
//! state estimation system. The SLAM and localization demos show how to use
//! arael as the optimizer backend, but a production SLAM pipeline would
//! additionally need:
//!
//! - **Front-end perception**: feature detection, descriptor extraction
//! - **Data association**: matching observed features to existing landmarks,
//! handling ambiguous or incorrect matches
//! - **Landmark management**: initializing new landmarks from observations,
//! merging duplicates, pruning unreliable ones
//! - **Keyframe selection**: deciding when to add new poses vs. discard
//! redundant frames
//! - **Loop closure**: detecting revisited places, verifying loop closure
//! candidates, and injecting constraints
//! - **Outlier rejection logic**: deciding which observations to reject
//! - **Marginalization / sliding window**: limiting optimization scope for
//! real-time operation, marginalizing old poses while preserving their
//! information
//! - **Map management**: spatial indexing, map saving/loading, multi-session
//! map merging
//!
//! Arael provides the compile-time-differentiated solver that sits at the
//! core of such a system. Everything above is application-level logic that
//! builds on top of it.
//!
//! # Example: Symbolic Math
//!
//! ```ignore
//! use arael::sym::*;
//!
//! arael::sym! {
//! let x = symbol("x");
//! let f = sin(x) * x + 1.0;
//!
//! println!("f(x) = {}", f); // sin(x) * x + 1
//! println!("f'(x) = {}", f.diff("x")); // x * cos(x) + sin(x)
//!
//! let vars = std::collections::HashMap::from([("x", 2.0)]);
//! println!("f(2.0) = {}", f.eval(&vars).unwrap()); // 2.8185...
//! }
//! ```
//!
//! The `sym!` macro auto-inserts `.clone()` on variable reuse, so you write
//! natural math without ownership boilerplate.
//! See [docs/SYM.md](https://github.com/harakas/arael/blob/master/docs/SYM.md)
//! for the full symbolic math reference.
//!
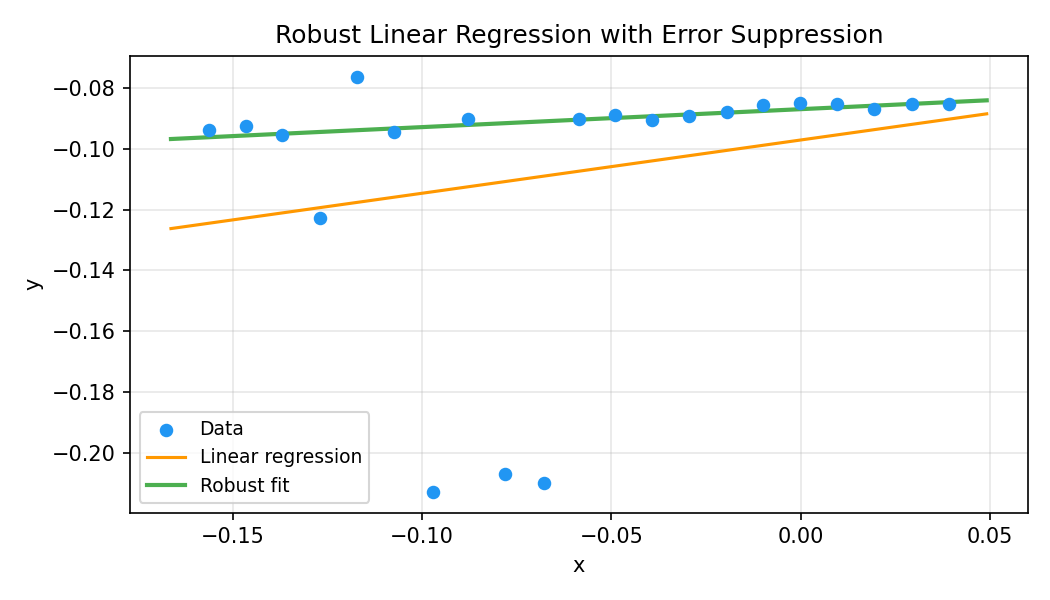
//! # Example: Robust Linear Regression
//!
//! Define a model with optimizable parameters and a residual expression.
//! The Starship method `gamma * atan(plain_r / gamma)` suppresses outlier
//! influence while preserving smooth differentiability:
//!
//! ```ignore
//! #[arael::model]
//! struct DataEntry { x: f32, y: f32 }
//!
//! #[arael::model]
//! #[arael(fit(data, |e| {
//! let plain_r = (a * e.x + b - e.y) / sigma;
//! gamma * atan(plain_r / gamma)
//! }))]
//! struct LinearModel {
//! a: Param<f32>,
//! b: Param<f32>,
//! data: Vec<DataEntry>,
//! sigma: f32,
//! gamma: f32,
//! }
//! ```
//!
//! The macro generates `calc_cost()`, `calc_grad_hessian()`, and `fit()`
//! with symbolically differentiated, CSE-optimized compiled code.
//! The robust fit ignores outliers while tracking the inlier data:
//!
//! 
//!
//! See [examples/linear_demo.rs](https://github.com/harakas/arael/blob/master/examples/linear_demo.rs) for the full source.
//!
//! # Runtime Differentiation
//!
//! Compile-time differentiation generates optimized Rust code with CSE at
//! build time -- ideal when the model structure is fixed. But many
//! applications need equations that are only known at runtime: user-typed
//! formulas in a CAD parametric dimension, configuration-driven curve
//! fitting, or symbolic constraints loaded from a file.
//!
//! Arael supports this through **runtime differentiation**: parse an
//! equation string with `arael_sym::parse`, symbolically differentiate
//! once at setup with `E::diff`, then evaluate the expression tree
//! numerically each solver iteration. The
//! [`ExtendedModel`](model::ExtendedModel) trait and
//! [`TripletBlock`](model::TripletBlock) provide the integration point
//! with the LM solver.
//!
//! The sketch editor (`arael-sketch`) uses this extensively for parametric
//! expression dimensions -- a user can type `d0 * 2 + 3` as a dimension
//! value, and the solver constrains the geometry to satisfy the equation
//! in real time, with full symbolic derivatives.
//!
//! The model uses `#[arael(root, extended)]` and implements
//! [`ExtendedModel`](model::ExtendedModel) to push residuals and
//! derivatives into a [`TripletBlock`](model::TripletBlock) at each
//! solver iteration:
//!
//! ```ignore
//! #[arael::model]
//! #[arael(root, extended)]
//! struct RegressionModel {
//! coeffs: refs::Vec<Coefficient>, // optimizable parameters
//! hb: TripletBlock<f64>, // Gauss-Newton accumulator
//! residual_expr: Option<arael_sym::E>, // parsed equation
//! derivs: Vec<(String, u32, arael_sym::E)>, // pre-computed derivatives
//! // ...
//! }
//!
//! impl ExtendedModel for RegressionModel {
//! fn extended_compute64(&mut self, params: &[f64], grad: &mut [f64]) {
//! for &(x, y) in &self.data {
//! vars.insert("x", x);
//! vars.insert("y", y);
//! let r = residual.eval(&vars).unwrap();
//! let dr: Vec<f64> = self.derivs.iter()
//! .map(|(_, _, d)| d.eval(&vars).unwrap()).collect();
//! // writes 2*r*dr into grad AND pushes full upper-triangle
//! // Hessian into the TripletBlock (one call, both done)
//! self.hb.add_residual(r, &indices, &dr, grad);
//! }
//! }
//! }
//! ```
//!
//! See
//! [examples/runtime_fit_demo.rs](https://github.com/harakas/arael/blob/master/examples/runtime_fit_demo.rs)
//! for a complete example that accepts an arbitrary equation from the
//! command line and fits it to data with robust error suppression.
//!
//! # Model Structure
//!
//! This is the reference for every piece that appears in an
//! `#[arael::model]` declaration: parameter types, Hessian blocks,
//! collection types, macro attributes, and the patterns for placing
//! constraints. For end-to-end code, see
//! [examples/single_root_demo.rs](https://github.com/harakas/arael/blob/master/examples/single_root_demo.rs)
//! (smallest complete model) and
//! [examples/slam_demo.rs](https://github.com/harakas/arael/blob/master/examples/slam_demo.rs)
//! (full SLAM setup). A markdown mirror lives at
//! [docs/MODEL.md](https://github.com/harakas/arael/blob/master/docs/MODEL.md).
//!
//! ## Parameter types
//!
//! | Type | Size | Use it when |
//! |---|---|---|
//! | [`Param<f32>`](model::Param) / [`Param<f64>`](model::Param) | 1 | scalar parameter |
//! | [`Param<vect2<T>>`](vect::vect2) | 2 | 2D point / direction |
//! | [`Param<vect3<T>>`](vect::vect3) | 3 | 3D position, velocity, linear vector |
//! | [`SimpleEulerAngleParam<T>`](model::SimpleEulerAngleParam) | 3 | three direct Euler angles (roll, pitch, yaw) |
//! | [`EulerAngleParam<T>`](model::EulerAngleParam) | 3 | "universal" delta composed with a fixed reference rotation; avoids parameterisation singularities for large-angle motion |
//!
//! ```ignore
//! #[arael::model]
//! struct Pose {
//! pos: Param<vect3f>, // 3 scalar params
//! ea: SimpleEulerAngleParam<f32>, // 3 scalar params (roll, pitch, yaw)
//! // info: plain non-Param data (sigmas, measurements) is fine
//! info: PoseInfo,
//! hb_pose: SelfBlock<Pose, f32>, // mandatory; see below
//! }
//! ```
//!
//! Every parameter stores a current `value` and a per-iteration
//! `work()` copy. The macro rewrites `pose.ea` in a constraint body
//! to `pose.ea.work()` so the LM trial step is evaluated without
//! mutating the stored value until the step is accepted.
//!
//! ### Initial values via the `_value` suffix
//!
//! Inside a constraint body, `pose.pos_value` (any `<field>_value`)
//! resolves to the **original** stored value of the parameter -- the
//! point the LM trial-step is measured against, not the trial step
//! itself. Use it to build drift / regularising residuals:
//!
//! ```ignore
//! let pos_drift = pose.pos - pose.pos_value;
//! [pos_drift.x * path.drift_pos_isigma,
//! pos_drift.y * path.drift_pos_isigma,
//! pos_drift.z * path.drift_pos_isigma]
//! ```
//!
//! ## Parameter control
//!
//! Three ways to keep a parameter out of the solve:
//!
//! 1. **[`Param::fixed(v)`](model::Param::fixed) at construction** --
//! immutable; the macro never emits indices for it. Typical use:
//! problem-wide constants that happen to be parameter-shaped
//! (e.g. a known camera pose).
//! 2. **Mutate `.optimize` at runtime** -- `pose.pos.optimize = false;`
//! freezes a live parameter for the next solve call. Flip it back
//! on to re-include. Use for staged optimisation (freeze subset,
//! solve, unfreeze, solve again).
//! 3. **The `_value` trick above** -- the parameter still moves but
//! the residual is anchored to its initial position via a drift
//! constraint.
//!
//! ```ignore
//! // (1) fixed at construction
//! let camera = Pose {
//! pos: Param::fixed(known_position), // never optimised
//! ea: Param::fixed(known_orientation),
//! /* ... */
//! };
//!
//! // (2) runtime freeze for a staged solve
//! for pose in path.poses.iter_mut() {
//! pose.pos.optimize = false;
//! pose.ea.optimize = false;
//! }
//! // ...solve only the remaining live params...
//! for pose in path.poses.iter_mut() {
//! pose.pos.optimize = true;
//! pose.ea.optimize = true;
//! }
//! ```
//!
//! See `Path::optimise_center` in `loc_global_demo.rs` for a real
//! usage of runtime `.optimize = false` -- it freezes every pose,
//! solves only for the root-level global rigid transform, bakes the
//! result into the poses, then un-freezes.
//!
//! ## Hessian block types
//!
//! The full Gauss-Newton Hessian is a **symmetric** block matrix,
//! with one block per (entity, entity) pair in the parameter
//! vector. The block at position `(Ei, Ej)` is the `NEi × NEj`
//! matrix of second partials; by symmetry
//! `H[Ei, Ej] = H[Ej, Ei]^T`. arael stores each unique block once
//! and lets the accumulator fill in the transpose when assembling
//! into a dense / band / sparse matrix. Every constraint that
//! couples a given pair adds its `2 * dr_i * dr_j` contribution to
//! the same block:
//!
//! - **Diagonal blocks (`Ei == Ej`)** live in each entity's
//! `SelfBlock<Ei>` and are symmetric; only the upper triangle is
//! stored. Every constraint touching `Ei`'s params writes there
//! additively.
//! - **Off-diagonal blocks (`Ei != Ej`)** live in a
//! `CrossBlock<Ei, Ej>` or in a `TripletBlock` that covers the
//! pair. One `CrossBlock<A, B>` covers both `H[A, B]` and its
//! transpose `H[B, A]` -- the accumulator writes both halves from
//! the single stored rectangle.
//!
//! Gradient contributions `2 * r * dr` go directly into the LM-
//! provided global gradient slice -- not into any block. Only
//! Hessian entries are stored block-wise.
//!
//! Pick the block shape that matches the constraint body's parameter
//! reach:
//!
//! | Type | Stores | Pick it when |
//! |---|---|---|
//! | [`SelfBlock<T>`](model::SelfBlock) | grad + upper-triangular Hessian for entity T's own params | **mandatory on every params-having struct.** Holds the per-entity gradient and the (T, T) block |
//! | [`CrossBlock<A, B>`](model::CrossBlock) | rectangular (A, B) cross Hessian only | **default for cross-entity Hessian pairs.** Packed in-place writes, cheap to assemble. One per unordered (A, B) entity pair; (A, A) / (B, B) diagonals stay on each entity's `SelfBlock` |
//! | [`TripletBlock<T>`](model::TripletBlock) | COO across-entity pairs | **always placed on the root** (one `hbt: TripletBlock<T>` on the root struct; constraints reach it via the `root.<field>` block spec). Two canonical uses: (1) the root has its own `Param` fields and constraints couple entity params with root params -- the (entity, root) cross pair lives in the root's TripletBlock; (2) runtime-parsed residuals via [`ExtendedModel`](model::ExtendedModel) that can't enumerate per-pair CrossBlocks statically -- `extended_compute*` writes into the root's TripletBlock directly. Never on a non-root struct. **Noticeably slower to assemble** -- every entry is a `Vec` push |
//!
//! `SelfBlock<Self>` is **required** on every Model that has
//! parameters -- omitting it is a compile-time error. Grad and
//! diagonal writes always land on each entity's `SelfBlock`;
//! `CrossBlock` and `TripletBlock` are cross-only storage.
//!
//! ```ignore
//! // Entity with its mandatory SelfBlock.
//! #[arael::model]
//! struct Pose {
//! pos: Param<vect3f>,
//! ea: SimpleEulerAngleParam<f32>,
//! hb_pose: SelfBlock<Pose, f32>, // required
//! }
//!
//! // Constraint struct linking two entities via a CrossBlock.
//! #[arael::model]
//! #[arael(constraint(hb, { /* residuals involving prev and cur */ }))]
//! struct PosePair {
//! #[arael(ref = root.poses)] prev: Ref<Pose>,
//! #[arael(ref = root.poses)] cur: Ref<Pose>,
//! hb: CrossBlock<Pose, Pose, f32>, // only the (prev, cur) cross block
//! }
//! ```
//!
//! ### Multi-CrossBlock vs TripletBlock
//!
//! For N-entity residuals the macro accepts two shapes:
//!
//! - **`constraint([hb_ab, hb_ac, hb_bc], { ... })`** -- one
//! `CrossBlock<A, B>` field per unordered entity pair on the
//! constraint struct. Packed rectangular storage, one
//! `add_residual_cross` per pair.
//! - **`constraint(..., root.hbt, { ... })`** -- route across-entity
//! pairs into a root-owned `TripletBlock<T>`. One COO
//! accumulator on the root absorbs cross pairs from every
//! constraint that references it. **The `TripletBlock` always
//! lives on the root** -- don't put one on a constraint struct
//! or an entity struct; the macro's `root.<field>` block spec is
//! the only correct way to reach a `TripletBlock`.
//!
//! **Prefer multi-`CrossBlock` whenever the set of cross-pairs is
//! fixed and dense.** `TripletBlock` carries a significant
//! Hessian-assembly penalty: every cross entry is a
//! `Vec<(u32, u32, T)>` push (with growth and no locality), whereas
//! `CrossBlock` writes in place into a pre-sized `NA * NB`
//! rectangle at a known offset. The same N-entity constraint
//! assembles substantially faster through multi-`CrossBlock`, and
//! the rectangular layout is friendlier to the CSC factorisation
//! that follows.
//!
//! Reach for the root-owned `TripletBlock` in two canonical
//! situations:
//!
//! 1. **The root has its own `Param` fields** and constraints
//! couple per-entity params with root params. The (entity, root)
//! cross pair has to live somewhere; a dedicated
//! `CrossBlock<Entity, Root>` per entity type is verbose and
//! scatters the cross storage, so the root TripletBlock is the
//! clean place for it. The `loc_global_demo` example uses this
//! -- `hbt: TripletBlock<f32>` on `Path` absorbs every
//! pose-to-globals cross pair emitted by the tilt and related
//! constraints.
//! 2. **Runtime-parsed residuals via [`ExtendedModel`](model::ExtendedModel).**
//! When the residual body is a user-supplied expression parsed
//! at runtime, the macro cannot enumerate per-pair CrossBlocks
//! statically. `ExtendedModel::extended_compute*` writes
//! directly into the root's TripletBlock instead -- see
//! [examples/runtime_fit_demo.rs](https://github.com/harakas/arael/blob/master/examples/runtime_fit_demo.rs).
//!
//! In both cases the triplet lives on the root, not on a constraint
//! struct.
//!
//! **Caveat for case 1 -- root-level `Param`s destroy sparsity.**
//! Every constraint that reads a root param introduces an
//! (entity, root) cross pair in the Hessian. If *many* constraints
//! read the same root param -- which is the whole point of
//! "global" root params -- the root's rows and columns in the
//! Hessian become dense (coupled to every entity that touches
//! them). Sparse Cholesky's fill-in grows accordingly and solve
//! times suffer. Use root `Param`s only when the quantity is
//! genuinely system-wide. Two canonical examples:
//!
//! - **Frame corrections** -- rigid translation + rotation applied
//! to *every* pose (the `loc_global_demo` pattern).
//! - **Global calibration** -- one-per-sensor quantities referenced
//! by every observation from that sensor: camera intrinsics
//! (`fx`, `fy`, `cx`, `cy`), lens-distortion coefficients, IMU
//! bias and scale factors, magnetometer declination, barometric
//! altitude reference. These live on the root naturally because
//! there's one of them for the whole problem and every
//! measurement reads them.
//!
//! Prefer per-entity params whenever the quantity is local. A root
//! `Param` referenced by 1% of constraints is fine; one referenced
//! by 90% of them will dominate factorisation cost.
//!
//! ```ignore
//! // Multi-CrossBlock: explicit Hessian pair per unordered entity pair.
//! #[arael::model]
//! #[arael(constraint([hb_ab, hb_ac, hb_bc], { /* 3-line residual */ }))]
//! struct SymmetryLL {
//! #[arael(ref = root.lines)] a: Ref<Line>,
//! #[arael(ref = root.lines)] b: Ref<Line>,
//! #[arael(ref = root.lines)] c: Ref<Line>,
//! #[arael(cross = (a, b))] hb_ab: CrossBlock<Line, Line>,
//! #[arael(cross = (a, c))] hb_ac: CrossBlock<Line, Line>,
//! #[arael(cross = (b, c))] hb_bc: CrossBlock<Line, Line>,
//! }
//!
//! // Root-owned TripletBlock: one COO accumulator on the root,
//! // referenced by constraints that couple an entity with root
//! // params (or where a per-pair CrossBlock layout doesn't fit).
//! #[arael::model]
//! #[arael(root)]
//! struct Path {
//! poses: refs::Deque<Pose>,
//! /* ... */
//! hb: SelfBlock<Path, f32>,
//! hbt: TripletBlock<f32>, // shared across-entity accumulator
//! }
//!
//! #[arael(constraint([hb_pose, root.hbt], { /* residual touching pose + root */ }))]
//! struct Pose { /* ... hb_pose: SelfBlock<Pose, f32> ... */ }
//! ```
//!
//! ## Collection types
//!
//! | Type | Use it when |
//! |---|---|
//! | [`refs::Vec<T>`](refs::Vec) | dense indexed list, contiguous storage, stable `Ref<T>` handles |
//! | [`refs::Deque<T>`](refs::Deque) | like `Vec` but supports `push_front` / `push_back` (rolling pose history) |
//! | [`refs::Arena<T>`](refs::Arena) | arbitrary insertion / deletion with stable handles |
//! | [`Ref<T>`](refs::Ref) | a handle into the containing collection |
//!
//! A Model struct is "directly composed" when a child Model appears
//! as a plain field (e.g. `sub: Sub` in `single_root_demo.rs`).
//! It's "collection-composed" when wrapped in one of the containers
//! above.
//!
//! ```ignore
//! #[arael::model]
//! #[arael(root)]
//! struct Path {
//! // collection-composed: many Pose instances, iterated by the macro
//! poses: refs::Deque<Pose>,
//! // direct composition: a single Sub entity as a plain field
//! globals: Globals,
//! hb: SelfBlock<Path, f64>,
//! }
//! ```
//!
//! ## Struct-level macro attributes
//!
//! | Attribute | Purpose |
//! |---|---|
//! | `#[arael::model]` | declare a Model; generates Model trait impl |
//! | `#[arael(root)]` | mark the top-level Model. Generates `LmProblem` impl, manages indices, owns the update cycle |
//! | `#[arael(root, f32)]` | scalar precision for the generated solver surface (default is f64) |
//! | `#[arael(root, jacobian)]` | additionally emit `calc_jacobian` and `calc_cost_table` for diagnostics |
//! | `#[arael(root, fit(coll, \|e\| body))]` | shorthand: sum-of-squares fit of a residual body over one collection |
//! | `#[arael(skip_self_block)]` | opt out of the mandatory `SelfBlock<Self>` (rare) |
//!
//! Constraints can also appear on the root itself -- useful for
//! regularising root-level parameters.
//!
//! ```ignore
//! // Root-level constraint pinning global_delta near its initial value.
//! #[arael::model]
//! #[arael(root, f32, jacobian)]
//! #[arael(constraint(hb, name = "global_delta_drift", {
//! let d = path.global_delta - path.global_delta_value;
//! [d.x * path.drift_pos_isigma,
//! d.y * path.drift_pos_isigma,
//! d.z * path.drift_pos_isigma]
//! }))]
//! struct Path {
//! // ...
//! global_delta: Param<vect3f>,
//! drift_pos_isigma: f32,
//! hb: SelfBlock<Path, f32>,
//! }
//! ```
//!
//! ## Constraint attributes
//!
//! Block-spec forms:
//!
//! ```ignore
//! #[arael(constraint(hb, { body }))] // single local block
//! #[arael(constraint([hb_ab, hb_ac, hb_bc], { body }))] // bracketed multi-block (N ≥ 2)
//! #[arael(constraint(pose.hb_pose, { body }))] // remote SelfBlock via Ref field
//! #[arael(constraint(hb_pose, root.hbt, { body }))] // self-primary + root-owned TripletBlock
//! ```
//!
//! N ≥ 2 block lists must use the bracketed form. The only
//! exception is the specific 2-item positional shape
//! `constraint(<local_self_block>, root.<triplet>, { body })`
//! above, which carries distinct semantics (self-primary routing
//! across the entity / root cross-pair). Writing
//! `constraint(hb_a, hb_b, hb_c, { body })` is rejected at macro
//! expansion -- use `constraint([hb_a, hb_b, hb_c], { body })`.
//!
//! Dotted names mean two different things depending on the first
//! segment:
//!
//! - **`<ref_field>.<block>`** -- reach through a `Ref<T>` field on
//! this struct to the target entity's `SelfBlock`. PointFrine uses
//! this to write grad / diagonal into the referenced Pose.
//! - **`root.<triplet>`** -- the literal keyword `root` points at a
//! `TripletBlock` field on the root struct. Cross pairs between
//! this entity's params and root's params route into that
//! `TripletBlock` in COO.
//!
//! ```ignore
//! // Remote SelfBlock: PointFrine lives on PointLandmark but writes
//! // pose's diagonal via pose.hb_pose; the (pose, path) cross-pair
//! // goes into a local CrossBlock<Pose, Path>.
//! #[arael::model]
//! #[arael(constraint([pose.hb_pose, hb_root], parent = lm, {
//! /* residual involving lm, pose, feature, path */
//! }))]
//! struct PointFrine {
//! #[arael(ref = root.poses)] pose: Ref<Pose>,
//! #[arael(ref = pose.info.features)] feature: Ref<PointFeature>,
//! hb_root: CrossBlock<Pose, Path, f32>,
//! }
//!
//! // Self-primary + root-owned TripletBlock: tilt on Pose references
//! // path.global_rot, so the pose<->path cross pair needs somewhere
//! // to live. `root.hbt` names a TripletBlock field on the Path root.
//! #[arael(constraint(hb_pose, root.hbt, {
//! let mr_global = path.global_rot.rotation_matrix();
//! let mr2w_eff = mr_global * pose.ea.rotation_matrix();
//! let ea_eff = mr2w_eff.get_euler_angles();
//! [(ea_eff.x - pose.info.tilt_roll) * path.tilt_isigma,
//! (ea_eff.y - pose.info.tilt_pitch) * path.tilt_isigma]
//! }))]
//! struct Pose { /* ... hb_pose: SelfBlock<Pose, f32> ... */ }
//! ```
//!
//! Modifiers (comma-separated before the body):
//!
//! | Modifier | Purpose |
//! |---|---|
//! | `parent = <name>` | bind the parent iteration variable to `<name>` (default is `a_type.to_lowercase()`) |
//! | `name = "label"` | label the residual group. Shows up in `calc_cost_table` and `JacobianRow::label` |
//! | `guard = <bool expr>` | evaluated once per iteration; when false the whole constraint is skipped for that iteration |
//! | `<var>: <Type>` | declare an extra typed binding for the body |
//!
//! ```ignore
//! // `parent = lm` so the body can refer to the enclosing PointLandmark
//! // as `lm`; `name = "feature_obs"` labels the residual group; `guard`
//! // skips the whole constraint when the flag is false.
//! #[arael(constraint([pose.hb_pose, hb_root],
//! parent = lm,
//! name = "feature_obs",
//! guard = feature.enabled,
//! {
//! /* residual using lm.pos, pose.*, feature.*, path.* */
//! }
//! ))]
//! struct PointFrine { /* ... */ }
//! ```
//!
//! Placement decides iteration:
//!
//! | Attribute on | What iterates | Typical use |
//! |---|---|---|
//! | Entity struct (`Pose`) | root iterates the containing collection | per-entity drift / tilt |
//! | Dedicated constraint struct (`PointFrine`) with `Ref<T>` fields | root iterates (often nested) collection of constraint structs | observation linking two or more entities |
//! | Root struct | fires once per solve | regularise root-level params, fix global DOF |
//!
//! ## Field-level macro attributes
//!
//! | Attribute | Applies to | Purpose |
//! |---|---|---|
//! | `#[arael(ref = <path>)]` | `Ref<T>` field | where to resolve the Ref. `root.<collection>` or `<other_ref>.<sub_collection>` |
//! | `#[arael(cross = (<refA>, <refB>))]` | `CrossBlock<T, T>` field | disambiguate which ref pair a same-typed CrossBlock serves |
//! | `#[arael(constraint_index)]` | `u32` field | receives a unique row id per constraint instance; useful for diagnostics |
//! | `#[arael(skip)]` | any field | exclude from the Model's serialize / accumulate paths (rare) |
//!
//! ```ignore
//! #[arael::model]
//! struct PointFeature {
//! pixel: vect2f,
//! // Camera is a Ref<Camera>; we don't want the macro to walk it
//! // as a nested Model, so skip it.
//! #[arael(skip)] camera: Ref<Camera>,
//! // ... measurement data ...
//! }
//!
//! #[arael::model]
//! #[arael(constraint(hb, { /* ... */ }))]
//! struct PosePair {
//! #[arael(ref = root.poses)] prev: Ref<Pose>,
//! #[arael(ref = root.poses)] cur: Ref<Pose>,
//! // constraint_index: the macro writes the per-constraint row id
//! // here so you can correlate log entries to this specific pair.
//! #[arael(constraint_index)] ci: u32,
//! hb: CrossBlock<Pose, Pose, f32>,
//! }
//! ```
//!
//! ## User-defined functions (`#[arael::function]`)
//!
//! Constraint bodies have a fixed set of built-in ops (arithmetic,
//! `sin` / `cos` / `exp` / `sqrt` / `clamp` / `safe_asin` / ...,
//! vector helpers). When your residual needs a custom function --
//! a factored-out symbolic helper, or an opaque numerical routine
//! with a known closed-form derivative -- declare it with
//! `#[arael::function]` and use it in constraint bodies the same
//! way you'd use `sin`.
//!
//! Two forms, distinguished by the attributed fn's signature.
//!
//! ### Form A: purely symbolic
//!
//! `fn name(x: E, ...) -> E { expr }` -- the body is an arael-sym
//! expression. The macro captures the body as an arael-sym source
//! string, re-parses it at constraint-expansion time, and inlines
//! the resulting `E` tree into the surrounding residual.
//! Derivatives come from arael-sym's own auto-diff.
//!
//! ```ignore
//! use arael_sym::E;
//!
//! #[arael::function]
//! fn sigmoid(x: E) -> E {
//! 1.0 / (1.0 + exp(-x))
//! }
//!
//! #[arael::function]
//! fn square(x: E) -> E { x * x }
//!
//! #[arael::model]
//! #[arael(root, jacobian)]
//! #[arael(constraint(hb, name = "fit", {
//! [(sigmoid(m.x) - m.target) * m.isigma,
//! (square(m.y) - 9.0) * m.isigma]
//! }))]
//! struct M {
//! x: Param<f64>,
//! y: Param<f64>,
//! target: f64,
//! isigma: f64,
//! hb: SelfBlock<M>,
//! }
//! ```
//!
//! The body is stringified and handed to
//! `arael_sym::parse_with_functions`, so identifiers resolve
//! against arael-sym's parser rather than Rust's name resolution.
//!
//! Optional `derivs = [expr, ...]` overrides auto-diff with an
//! explicit partial per parameter. Expressions are raw tokens,
//! not strings or closures.
//!
//! ### Form B: opaque numerical eval + symbolic derivatives
//!
//! `#[arael::function(sym_name, derivs = [...])]` on a
//! `fn name_eval(x: f32, ...) -> f32` (or `f64`). The eval fn is
//! opaque numerical code the macro never inspects. The positional
//! `sym_name` names the symbolic sibling the macro emits for use
//! inside constraints; the sibling delegates residual evaluation
//! to the eval fn and uses the stashed `derivs` expressions for
//! gradient / Hessian assembly.
//!
//! ```ignore
//! // `my_safe_asin` clamps its input before calling the libm
//! // asin and supplies a closed-form derivative that stays
//! // finite at the clamp edge. The `identity(...)` guard blocks
//! // the simplifier from reordering `1 - x*x + 1e-12` into
//! // `1 + 1e-12 - x*x` -- at |x| ~ 1 the subtraction already
//! // cancels most significant bits and the reordered form loses
//! // the 1e-12 floor. Same pattern as arael-sym's built-in
//! // `safe_asin`.
//! #[arael::function(my_safe_asin,
//! derivs = [1.0 / sqrt(identity(1.0 - x * x) + 1e-12)])]
//! fn my_safe_asin_eval(x: f64) -> f64 {
//! x.clamp(-1.0, 1.0).asin()
//! }
//!
//! #[arael::model]
//! #[arael(root, jacobian)]
//! #[arael(constraint(hb, name = "inverse_sin", {
//! [(my_safe_asin(m.x) - m.target) * m.isigma]
//! }))]
//! struct M {
//! x: Param<f64>,
//! target: f64,
//! isigma: f64,
//! hb: SelfBlock<M>,
//! }
//! ```
//!
//! `derivs` is required in Form B -- one expression per scalar
//! parameter, same token shape as Form A derivs. Parameter names
//! inside the derivative expressions refer to the eval fn's own
//! parameters in declaration order, so the `x` in
//! `1.0 / sqrt(1.0 - x * x + 1e-12)` is the `x` from
//! `fn my_safe_asin_eval(x: f64)`. Derivative expressions may
//! call other registered `#[arael::function]`s, including each
//! other and themselves -- mutual recursion is resolved by a
//! two-pass bag build at constraint-expansion time.
//!
//! ### Ergonomics
//!
//! - Parameter names in deriv expressions resolve to the
//! attributed fn's own parameters, not to anything in the
//! surrounding module.
//! - Numeric literals accept scientific notation (`1e-12`,
//! `2.5E+2`).
//! - The sibling fn (Form A body, Form B positional name) is
//! also callable from ordinary Rust with `E` arguments, so
//! user fns compose with [`model::ExtendedModel`] / runtime
//! `parse_with_functions` workflows for residuals that aren't
//! known at compile time. Mutually-referencing user fns (and
//! forward references to fns declared later in the file or in
//! a dependency) work at runtime via a registry populated
//! through `inventory`; cross-crate composition works without
//! re-declaration.
//! - Errors point at user source: bad signatures, mismatched
//! deriv counts, and name collisions fire at attribute
//! expansion; parse failures and arity mismatches fire at the
//! call site inside the constraint body.
//!
//! See
//! [`examples/user_function_demo.rs`](https://github.com/harakas/arael/blob/master/examples/user_function_demo.rs)
//! for a runnable two-form demo.
//!
//! ## Runtime differentiation (`ExtendedModel`)
//!
//! For Models whose residuals aren't known at compile time (e.g. a
//! user-supplied expression parsed at runtime), implement
//! [`model::ExtendedModel`] alongside [`model::Model`]. The macro does
//! **not** generate the residual evaluation; you write:
//!
//! ```ignore
//! fn extended_update64(&mut self, params: &[f64]);
//! fn extended_compute64(&mut self, params: &[f64], grad: &mut [f64]);
//! ```
//!
//! `extended_compute` evaluates residuals, writes directly into the
//! LM-provided `grad` slice, and accumulates into a `TripletBlock`
//! on the Model. See
//! [`examples/runtime_fit_demo.rs`](https://github.com/harakas/arael/blob/master/examples/runtime_fit_demo.rs)
//! for the full pattern: runtime parse + compile-time differentiation
//! of the parsed expression.
//!
//! # Solvers
//!
//! arael ships a Levenberg-Marquardt solver with multiple linear-
//! algebra backends sharing one trait ([`simple_lm::LmSolver`]) and
//! one config struct ([`simple_lm::LmConfig`]). Markdown mirror:
//! [docs/SOLVERS.md](https://github.com/harakas/arael/blob/master/docs/SOLVERS.md).
//!
//! ## Which backend?
//!
//! **Default to [`simple_lm::solve_sparse_faer_f32`] (or
//! [`simple_lm::solve_sparse_faer`] for f64).** For most real
//! problems the Hessian is sparse enough that sparse Cholesky is
//! the right choice, and `faer` is the best-supported backend --
//! pure Rust, no external dependency, handles the full sparsity
//! pattern of a SLAM-like problem.
//!
//! | Backend | When |
//! |---|---|
//! | **[`solve_sparse_faer[_f32]`](simple_lm::solve_sparse_faer)** | **default**. Any non-trivial problem (> ~10 parameters, any sparse Hessian structure) |
//! | [`solve[_f32]`](simple_lm::solve) (dense) | toy problems (≤ 4 parameters), or when the Hessian is actually small and dense |
//! | [`solve_band[_f32]`](simple_lm::solve_band) | **only** when the Hessian is genuinely block-tridiagonal with a known half-bandwidth `kd`. ~10x faster than dense at 500 poses but hard-errors on any off-band element |
//!
//! Feature-gated backends (`BandLapack`, `SparseDirect`,
//! `SparseSchur`, `SparseEigen`, `SparseCholmod`) target specific
//! environments (LAPACK interop, alternative factorisations,
//! external-solver interop). Enable the corresponding cargo feature
//! only if you need the interop -- they don't outperform `faer` on
//! any common workload.
//!
//! ## Basic usage
//!
//! ```ignore
//! use arael::simple_lm::{LmConfig, solve_sparse_faer_f32};
//!
//! let cfg = LmConfig::<f32> {
//! verbose: true,
//! ..Default::default()
//! };
//!
//! let mut params = Vec::<f32>::new();
//! model.serialize32(&mut params);
//!
//! let result = solve_sparse_faer_f32(¶ms, &mut model, &cfg);
//!
//! model.deserialize32(&result.x);
//! println!("{} iterations: {:.4} -> {:.4}",
//! result.iterations, result.start_cost, result.end_cost);
//! ```
//!
//! The `#[arael(root)]` macro generates the `LmProblem<T>` impl the
//! solver needs; you never write it by hand.
//!
//! ## [`LmConfig`](simple_lm::LmConfig) -- every field, with defaults
//!
//! | Field | Default | Meaning |
//! |---|---|---|
//! | `abs_precision` | `1e-6` | cost-drop threshold for "small step" detection |
//! | `rel_precision` | `1e-4` | fractional cost improvement below this is "small" |
//! | `max_iters` | `100` | hard cap on iterations (counts inner damping retries) |
//! | `min_iters` | `5` | solver cannot terminate before this many accepted steps |
//! | `patience` | `3` | consecutive small steps required to terminate |
//! | `initial_lambda` | `1e-4` | starting LM damping; small ≈ Gauss-Newton, large ≈ gradient descent |
//! | `cost_threshold` | `0.0` | terminate immediately when cost ≤ this (`0.0` disables) |
//! | `verbose` | `false` | per-iteration line on stderr. **Turn on first whenever debugging** |
//!
//! The solver terminates when **all of** `iter >= min_iters`, the
//! current step is "small" (below both `abs_precision` and
//! `rel_precision`), and the preceding `patience` steps were also
//! small. Or on any of `iter >= max_iters` / `cost <= cost_threshold`.
//!
//! ## Tuning for performance vs quality
//!
//! The defaults are a reasonable middle ground; for a production
//! solve you'll usually want to tune. The central trade-off is
//! **iterations vs convergence quality**: every iteration costs
//! time (one Hessian assembly + one Cholesky + step evaluation),
//! and the last few iterations often deliver very little cost
//! improvement. Too many iterations and you pay for marginal
//! refinement; too few and the final solution is biased toward the
//! initial guess. Spend time measuring the actual vs the needed on
//! representative inputs.
//!
//! Knobs, in rough order of impact:
//!
//! - **`verbose: true` first**. Read the per-iteration cost and
//! lambda trace for a few real solves. You'll see immediately
//! whether the solver converges in 3, 10, or 80 iterations,
//! whether it keeps making progress near the end, and whether
//! Cholesky is rejecting steps. You cannot tune what you haven't
//! measured.
//! - **`max_iters`**. The hard cap. Default 100 is safe for
//! development; in production it's often worth reducing to a
//! value informed by the verbose trace (e.g. 20 if convergence
//! typically happens by iteration 15). Too low and solves
//! terminate mid-descent; too high and pathological inputs waste
//! budget.
//! - **`rel_precision` / `abs_precision`**. Loosening these is the
//! fastest way to shave iterations off a converged solve. For a
//! real-time pass that just needs "good enough", bumping
//! `rel_precision` from `1e-4` to `1e-3` often halves the
//! iteration count. For batch refinement where precision matters,
//! tighten to `1e-5` or below; watch the trace to confirm you're
//! buying real cost improvement and not just grinding numerical
//! noise.
//! - **`patience`**. Higher = more conservative about terminating
//! (one lucky step below threshold won't end the solve). 3 is a
//! good default; drop to 1 only if you've already measured that
//! single below-threshold steps are reliable convergence signals
//! on your problem. Raising above 3 rarely helps except on very
//! noisy cost landscapes.
//! - **`min_iters`**. Floor on accepted steps before termination
//! can fire. Useful when the initial state happens to be near a
//! local minimum and the precision check would stop after one
//! step -- keep at default 5 unless you have a specific reason.
//! - **`initial_lambda`**. Should match how far the initial state
//! is from the minimum:
//! - **Warm start** (the system was already solved and you're
//! adding a small amount of new data, e.g. incremental SLAM
//! with one new pose appended to a converged trajectory) --
//! use a **small** `initial_lambda` like `1e-6`. Near the
//! minimum the linearisation is accurate and Gauss-Newton-style
//! steps converge in a handful of iterations.
//! - **Cold start** (fresh batch solve, noisy initial estimates
//! far from the true state) -- use a **larger** `initial_lambda`
//! like `1e-2` or `1e-1`. Gradient-descent-like steps are more
//! stable when the Jacobian is a poor local approximation;
//! you'll save several iterations otherwise spent rejecting
//! overshoots and ratcheting λ up.
//!
//! Default `1e-4` is a middle-ground guess when you don't know
//! which regime you're in. If the verbose trace shows the first
//! few iterations repeatedly rejecting, λ was too small; if cost
//! barely moves across the first few iterations, λ was too large.
//! - **`cost_threshold`**. Set to a non-zero value only when you
//! actually have a known target cost (feasibility-style problems,
//! e.g. "get residuals below the measurement-noise floor").
//! Terminates as soon as cost drops below the threshold without
//! waiting for the patience counter. Leave at `0.0` for ordinary
//! least-squares.
//!
//! Process:
//!
//! 1. Run with `verbose: true` on representative input; look at the
//! per-iteration cost trace and the final cost.
//! 2. Find the iteration at which cost improvement effectively
//! stops. Call that `K`.
//! 3. Set `max_iters` to a comfortable margin above `K` (e.g. `2*K`).
//! 4. Loosen `rel_precision` until the solver terminates around
//! iteration `K`, not past it. If the final cost moves
//! meaningfully on real data, back off.
//! 5. Re-run on the full input distribution to confirm you haven't
//! regressed any corner case.
//!
//! For graduated-optimisation loops (see below), tune each pass
//! independently -- the early, loose passes converge fast and can
//! use aggressive thresholds; the final tight pass typically needs
//! more iterations and tighter precision.
//!
//! ### At the very top end
//!
//! Iteration counts are discrete, so the savings stack
//! multiplicatively when the counts are small. Going from 4
//! iterations to 3 is a **25% reduction** in compute cost; 3 to 2
//! is 33%; 2 to 1 is 50%. In high-frequency loops (real-time
//! localisation at 60 Hz, per-frame bundle adjustment) these
//! single-iteration wins dominate the overall runtime. The tuning
//! process above leaves enough performance on the table that more
//! advanced techniques are worth considering at this scale:
//!
//! - **Learned initial parameters.** Train a small model
//! (regression, small NN, gradient-boosted tree) on pairs of
//! *(problem features, optimised params)* from past solves and
//! use its prediction as the LM starting point. A good initial
//! guess can turn a 4-iteration solve into a 1- or 2-iteration
//! solve.
//! - **Learned termination decision.** Train a classifier on the
//! *verbose trace* of past solves (cost, Δcost, λ, step size) to
//! predict "further iterations won't materially change the
//! solution". Replacing the fixed `patience + rel_precision`
//! criterion with a learned predictor can cut the tail
//! iterations that deliver negligible cost improvement.
//! - **Problem-specific λ schedules** beyond the single
//! `initial_lambda` knob -- e.g. warm-start λ from the previous
//! frame's converged damping in an incremental pipeline.
//!
//! These are research-grade refinements, not drop-in features.
//! Reach for them only after the basic tuning process has
//! plateaued and the per-solve cost is genuinely the bottleneck.
//!
//! ## LM in five bullets
//!
//! On each iteration:
//!
//! 1. **Linearise** the residuals at the current `x`: compute `r, J`.
//! 2. **Damp**: assemble `J^T J + λ * diag(J^T J)` and `J^T r`.
//! 3. **Solve** the damped system with the chosen backend. Cholesky
//! either succeeds (matrix is positive-definite) or rejects.
//! 4. **Accept or reject** by comparing new cost to old: better →
//! accept and shrink λ (0.2×); worse → reject and grow λ (10×),
//! retry with the new damping.
//! 5. **Repeat** until termination rules fire.
//!
//! `λ` behaves as a trust-region radius: large λ = small, safe
//! steps; small λ = large Gauss-Newton steps that move faster when
//! the linearisation is accurate.
//!
//! ## Verbose trace format
//!
//! Each iteration prints one line to stderr:
//!
//! ```text
//! 3/0: 44.5679->44.5403 / 0.0276, lambda=2e-5 (step=91)
//! ```
//!
//! | Field | Meaning |
//! |---|---|
//! | `3/0` | iteration / inner-retry counter. `0` = Cholesky succeeded first try |
//! | `44.5679->44.5403` | cost before → cost after the step |
//! | `0.0276` | absolute cost improvement |
//! | `lambda=2e-5` | damping in effect |
//! | `(step=91)` | microseconds for this iteration |
//!
//! A Cholesky rejection prints a longer diagnostic line:
//!
//! ```text
//! 5/0: Cholesky failed (damped matrix not positive-definite), lambda=1.6e-7 -> 1.6e-6 (step=177) [non-finite: grad=0 diag=0 x=0 matrix=0] [diag<=0: 0]
//! ```
//!
//! | Field | What it says |
//! |---|---|
//! | `lambda=1.6e-7 -> 1.6e-6` | new λ for the retry (×10) |
//! | `non-finite: grad=N diag=N x=N matrix=N` | NaN/Inf counts in each scratch buffer. All zero → matrix is fully finite; any non-zero → find the bad residual or derivative |
//! | `diag<=0: N` | count of Hessian-diagonal entries ≤ 0. Non-zero means some parameter is untouched by every constraint (indices left at `u32::MAX`) or a negative contribution leaked in -- both are bugs, not rounding noise |
//!
//! When all counts are 0, the rejection is f32 accumulation noise at
//! tiny λ -- LM recovers by bumping λ. When any are non-zero, stop
//! and fix the model.
//!
//! ## Graduated optimisation
//!
//! When a constraint is stiff (large sigma spread across groups),
//! start with the tight constraints *loose* and ramp up. The LM
//! surface is smoother at low isigma; convergence is more reliable
//! and faster than throwing the tight problem at the solver from a
//! noisy initial estimate.
//!
//! Idiom: a scale field on the root, multiplied into the stiff
//! residuals, stepped per pass:
//!
//! ```ignore
//! struct Path { /* ... */ frine_isigma_scale: f32 }
//!
//! // in the constraint body:
//! let plain1 = ... * feature.isigma.x * path.frine_isigma_scale;
//!
//! // main loop:
//! for scale in [0.01, 0.1, 1.0] {
//! path.frine_isigma_scale = scale;
//! let result = solve_sparse_faer_f32(¶ms, &mut path, &cfg);
//! }
//! ```
//!
//! See `examples/loc_demo.rs` and `examples/slam_demo.rs`. Keep the
//! scale on a single root field and set it to the desired absolute
//! value each pass -- the constraint body reads the current value, so
//! the sigma you see is always the sigma in effect.
//!
//! # Instrumentation & Debugging
//!
//! When a model fails to converge or the solution is wrong, the usual
//! chain of inspection is: look at the *cost distribution*, check the
//! *gradient and Hessian* for bad values, then look at the *rank of the
//! Jacobian*. Each step corresponds to a specific arael API.
//!
//! Enable instrumentation by adding the `jacobian` flag on the root:
//!
//! ```ignore
//! #[arael::model]
//! #[arael(root, jacobian)]
//! struct MyModel { /* ... */ }
//! ```
//!
//! This generates an impl of [`model::JacobianModel`] with two methods:
//! `calc_jacobian` and `calc_cost_table`.
//!
//! ## My solve doesn't converge. What do I check?
//!
//! 0. **Turn on solver verbose mode first.** Set `verbose: true` on
//! `LmConfig` and every LM step prints cost, lambda, and the step
//! outcome. On a Cholesky rejection the line also reports
//! non-finite counts for grad / diagonal / cur_x / matrix and a
//! count of non-positive diagonal entries -- four quick signals
//! that narrow the problem before any deeper digging:
//!
//! ```ignore
//! let cfg = arael::simple_lm::LmConfig::<f32> { verbose: true, ..Default::default() };
//! let result = arael::simple_lm::solve_sparse_faer_f32(&x0, &mut model, &cfg);
//! ```
//!
//! A healthy pass looks like steady cost drops with rising /
//! stabilising step sizes and no Cholesky rejections -- see
//! `examples/slam_demo.rs` run for a reference trace. If verbose
//! already reports NaN / Inf or diag ≤ 0, skip to steps 2 / 3
//! below; otherwise continue to the cost-by-label breakdown.
//!
//! 1. **Cost breakdown by label.** Name your constraint attributes with
//! `#[arael(constraint(hb, name = "drift", { ... }))]` so each group
//! shows up under its own label in the sum-of-squares. Call
//! `model.calc_cost_table(¶ms)` to get `HashMap<&'static str, T>`:
//!
//! ```ignore
//! use arael::model::JacobianModel;
//! let table = model.calc_cost_table(¶ms);
//! for (label, cost) in &table { println!("{:<20} {:.6}", label, cost); }
//! ```
//!
//! A single label dominating the total is usually the culprit --
//! either an overly tight sigma, bad initial values for its inputs,
//! or a constraint that's mathematically unsatisfiable.
//!
//! 2. **NaN or Inf residuals / derivatives.** The verbose-mode output
//! from step 0 already tells you whether grad / matrix / params
//! contain non-finite values at the failing step. If they do, walk
//! the Jacobian to find the specific row:
//!
//! ```ignore
//! let j = model.calc_jacobian(¶ms);
//! for row in &j.rows {
//! if !row.residual.is_finite()
//! || !row.entries.iter().all(|(_, v)| v.is_finite())
//! {
//! eprintln!("bad row cid={} label={}", row.constraint, row.label);
//! }
//! }
//! ```
//!
//! A NaN residual or partial derivative usually means a `sqrt`,
//! `acos`, `asin`, or `atan2` saw a degenerate input (zero-length
//! vector, both-zero arguments, `|x| > 1` for asin/acos).
//! `arael_sym` ships `safe_sqrt`, `safe_asin`, `safe_acos`,
//! `safe_atan2` that clamp / regularise at the singular point and
//! produce non-diverging derivatives. Before reaching for them,
//! though, **prefer to redesign the constraint so the singularity
//! can't be hit**. A `safe_*` wrapper hides the degeneracy from
//! the solver and may leave the residual insensitive to the
//! parameters that should drive it out of the singular region;
//! an equivalent constraint formulated on the right geometric
//! quantity avoids the singularity entirely. E.g. match 3D
//! landmarks to features in 3D space (compare world-frame
//! directions or positions) instead of projecting through a
//! camera model and computing 2D image-plane residuals -- the
//! 3D formulation is simpler, better conditioned, and has no
//! pixel-wraparound / behind-camera pathology.
//!
//! 3. **Non-positive diagonal.** The verbose-mode `diag<=0: N`
//! counter at a Cholesky rejection is the loudest possible signal
//! that some parameter is untouched by every constraint (indices
//! left at `u32::MAX`) or is receiving a negative contribution.
//! Either outcome is a bug distinct from f32 accumulation noise.
//!
//! 4. **Gradient magnitude.** After
//! [`simple_lm::LmProblem::calc_grad_hessian_dense`], the maximum
//! absolute gradient component should be small relative
//! to the cost scale at a local minimum. A huge gradient with tiny
//! cost means the parameter scaling is off -- one parameter moves
//! cost several orders of magnitude more than another, which
//! destabilises Levenberg-Marquardt.
//!
//! 5. **Hessian health.** The same `hessian` array should be finite and
//! positive-semi-definite at a minimum (smallest eigenvalue ≥ 0
//! modulo roundoff). A significantly-negative smallest eigenvalue
//! means the Gauss-Newton approximation J^T J is a poor local fit
//! -- often because constraints are ill-conditioned or cancel.
//!
//! 6. **Stiffness.** Ratios between the smallest and largest sigmas
//! (or equivalently, smallest and largest eigenvalues of J^T J)
//! that span many orders of magnitude make the problem numerically
//! stiff. LM damping has to pick a lambda that suits both ends,
//! which is hard at f32 precision. Keep isigmas comparable where
//! you can; if a tight constraint dominates one direction, a gauge
//! direction orthogonal to it will starve for signal. Starting
//! with a loose scale and ramping up (graduated optimisation --
//! see `examples/loc_demo.rs` and `slam_demo.rs` for the
//! `frine_isigma_scale` pattern) helps LM climb a stiff problem
//! without rejecting early steps.
//!
//! 7. **Simpler math beats clever math.** Reformulate residuals on the
//! most natural geometric quantity. 3D direction / position errors
//! are cheaper and better-conditioned than 2D reprojection errors;
//! relative rotations compared as matrices or unit quaternions
//! avoid Euler-angle gimbal lock; distances compared in squared
//! form avoid `sqrt` derivatives near zero. Every nonlinear
//! operation you remove is one less place for the residual /
//! derivative to misbehave and one less source of stiffness.
//!
//! 8. **Inspect the generated code.** Use [`cargo expand`](https://github.com/dtolnay/cargo-expand)
//! to see what the macro emitted for your constraint. See the
//! next section for a walkthrough.
//!
//! 9. **Rank / DOF.** Call [`model::Jacobian::singular_values`] (or the
//! full [`Jacobian::svd`](model::Jacobian::svd) for directions):
//!
//! ```ignore
//! let j = model.calc_jacobian(¶ms);
//! let svs = j.singular_values();
//! println!("{:?}", svs); // descending; near-zero entries count free DOF
//! ```
//!
//! Near-zero singular values count the degrees of freedom. If this
//! is higher than you expect, the model is under-constrained. The
//! right singular vectors (columns of [`SvdResult::v`](model::SvdResult))
//! corresponding to σ ≈ 0 name the unconstrained parameter
//! directions -- useful for identifying *which* parameters are free.
//! SVD is always performed in f64 regardless of the model's element
//! type, so rank detection stays reliable even for f32 models.
//!
//! ## How do I know my new constraint is actually doing anything?
//!
//! Name the attribute, run the solve before and after adding it, and
//! compare `calc_cost_table` entries and row counts. If the new label
//! appears with a non-trivial cost contribution, it's participating.
//! If its row count is zero, a `guard` is excluding it. See
//! [examples/jacobian_demo.rs](https://github.com/harakas/arael/blob/master/examples/jacobian_demo.rs)
//! for an end-to-end walkthrough.
//!
//! ## Looking under the hood with `cargo expand`
//!
//! Mastering arael means being able to read what the macros actually
//! generated for your equations. `#[arael::model]` does a lot: it
//! interprets the constraint body symbolically, differentiates it
//! against every reachable parameter, runs common-subexpression
//! elimination, and emits Rust code for three call paths
//! (`__compute_blocks`, `__set_block_indices`, `calc_jacobian`).
//! [`cargo expand`](https://github.com/dtolnay/cargo-expand)
//! (`cargo install cargo-expand`) prints the expansion exactly as
//! the compiler sees it.
//!
//! ```bash
//! cargo expand --example single_root_demo
//! # or, for your own crate:
//! cargo expand --lib # library
//! cargo expand --bin my_bin # binary
//! cargo expand my_mod::MyModel # a specific path
//! ```
//!
//! ### Example: a one-line fix constraint
//!
//! The single-root demo declares
//!
//! ```ignore
//! #[arael(constraint(hb, name = "fix_x", {
//! [(singleroot.x - 3.0) * singleroot.isigma]
//! }))]
//! struct SingleRoot {
//! x: Param<f64>,
//! y: Param<f64>,
//! isigma: f64,
//! /* ... */
//! }
//! ```
//!
//! `cargo expand --example single_root_demo` shows the macro emits a
//! `__compute_blocks` method with a block like:
//!
//! ```ignore
//! /// arael: SingleRoot[fix_x] @ examples/single_root_demo.rs:28
//! let __r_0 = singleroot.isigma * (singleroot.x.work() - 3.0);
//! let __dr_0_0 = singleroot.isigma; // d/d x
//! let __dr_0_1 = 0.0; // d/d y
//! __item.hb.add_residual(
//! __r_0 as f64,
//! &[__dr_0_0 as f64, __dr_0_1 as f64],
//! grad,
//! );
//! ```
//!
//! Things to notice:
//!
//! - `singleroot.x.work()` -- each param access is rewritten to
//! `work()` so the LM trial step is used in place of the stored
//! value without mutating it.
//! - Derivatives for every param the constraint touches appear
//! individually (`__dr_0_0`, `__dr_0_1`). The `0.0` entry for `y`
//! is not elided because the index into `hb` is positional;
//! dead rows fold out at optimisation time.
//! - The residual and the partials flow into the entity's Hessian
//! block via `hb.add_residual(r, dr, grad)` -- one call per
//! residual, accumulating `2*r*dr` into `grad` and `2*dr_i*dr_j`
//! into the block's packed upper triangle.
//! - The `/// arael: ...` doc comment is a source marker pointing at
//! the constraint attribute the block came from -- invaluable when
//! the expansion runs to thousands of lines.
//!
//! ### Example: shared subexpressions
//!
//! In a larger body -- say a landmark observation that builds a
//! rotation matrix and reuses it across x/y/z residuals -- the
//! macro runs CSE before emitting code, so you see lines like
//!
//! ```ignore
//! let __cse_0 = cos(pose.ea.z.work());
//! let __cse_1 = sin(pose.ea.z.work());
//! let __cse_2 = __cse_0 * (lm.pos.x - pose.pos.x.work())
//! + __cse_1 * (lm.pos.y - pose.pos.y.work());
//! // __cse_2 reused in __r_0, __r_1, and every __dr_* that needs it
//! ```
//!
//! Reading these tells you what the compiler *actually* has to
//! evaluate -- useful for understanding the cost of a constraint,
//! spotting accidental non-shared work, and sanity-checking that
//! symbolic simplification collapsed things you expected it to.
//!
//! ### What to look for
//!
//! - **`__set_block_indices`** -- where each `SelfBlock` /
//! `CrossBlock` / `TripletBlock` gets its global parameter indices
//! written into place. A block that isn't touched here is invisible
//! to the solver (its `u32::MAX` sentinel causes every `add_residual`
//! to silently skip) -- a common failure mode.
//! - **`__compute_blocks`** -- the grad + block-Hessian accumulation
//! path. Each constraint is a nested block with its own CSE'd body.
//! - **`calc_jacobian`** -- same body structure but builds a
//! `JacobianRow` per residual instead of accumulating into the
//! blocks. Generated only when you declare `#[arael(root, jacobian)]`.
//! - **source markers** -- doc comments like
//! `/// arael: PointFrine[<name>] @ path/to/file.rs:NNN`
//! pinpoint the constraint attribute each block came from.
//!
//! Expansion grows quickly (the single_root demo is ~800 lines; a
//! full SLAM model is several thousand). Use `sed -n` or a pager
//! scoped to the method you care about:
//!
//! ```bash
//! cargo expand --example slam_demo | sed -n '/fn __compute_blocks/,/^ fn /p'
//! ```
//!
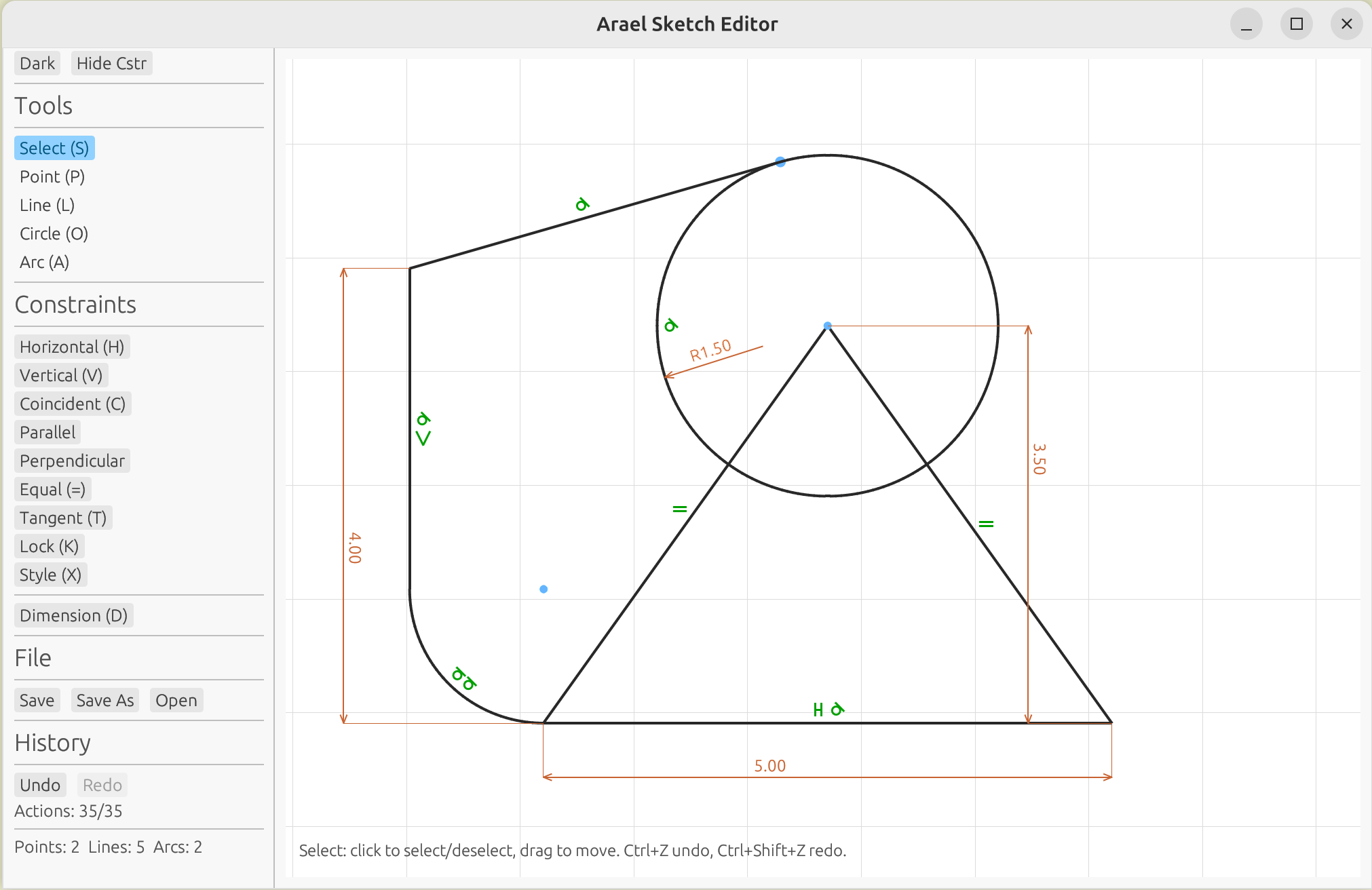
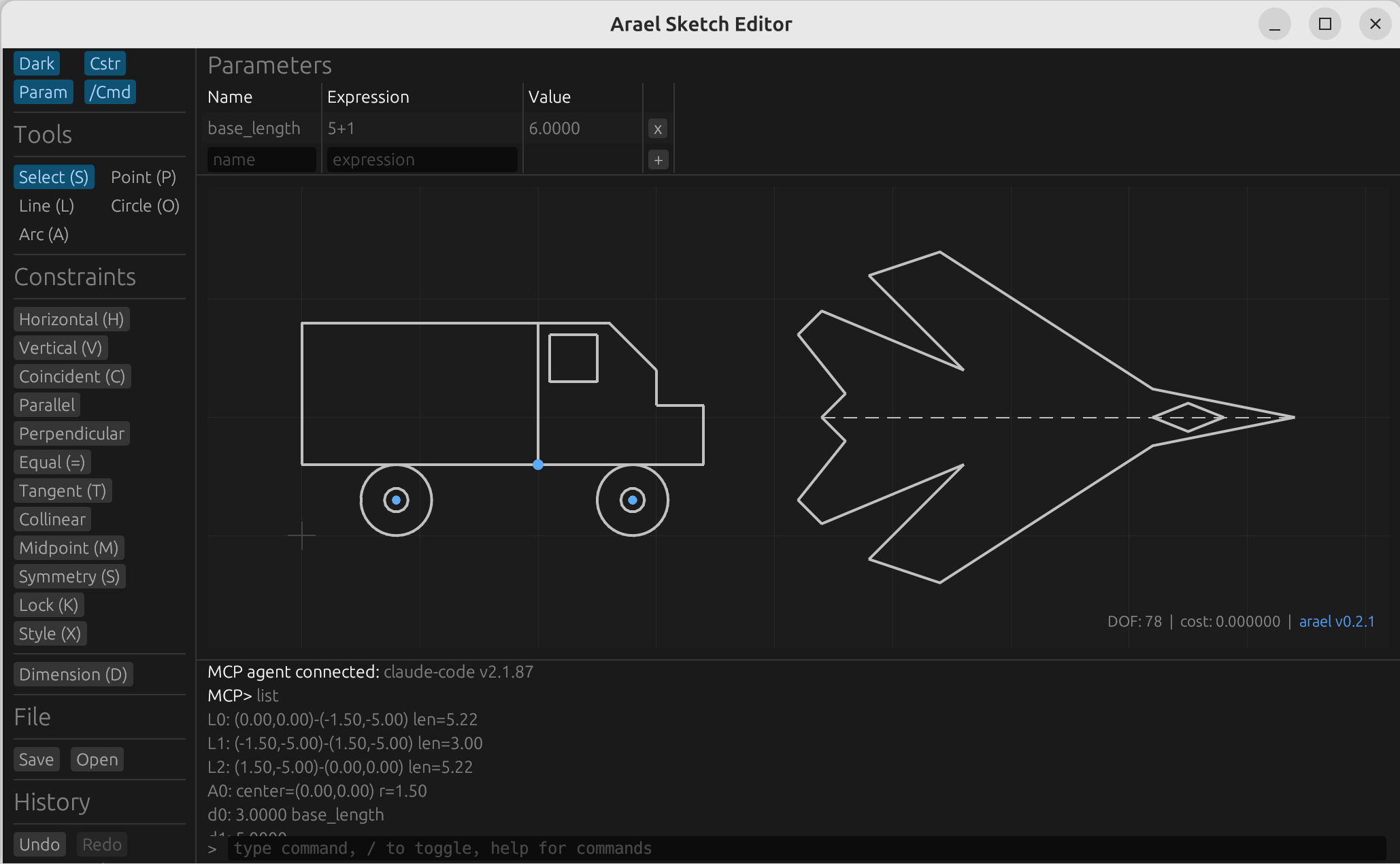
//! # 2D Sketch Editor
//!
//! The `arael-sketch` crate provides an interactive constraint-based 2D sketch
//! editor built on the optimization framework. It combines both differentiation
//! modes: geometric constraints (horizontal, coincident, parallel, tangent, etc.)
//! use compile-time differentiation, while parametric dimensions use runtime
//! differentiation -- the user types an expression like `d0 * 2 + 3` and the
//! solver constrains the geometry to satisfy it in real time, with full symbolic
//! derivatives. Dimensions can reference each other, entity properties
//! (`L0.length`, `A0.radius`), and arithmetic expressions, making it a fully
//! parametric constraint solver. Runs natively and in the browser via
//! WebAssembly.
//!
//! [](https://sketch.mare.ee/)
//!
//! [Try it in the browser](https://sketch.mare.ee/)
//!
//! The editor includes a command panel (`/` to toggle) with 40+ scripting
//! commands, and an embedded MCP server (`--mcp`) that enables AI agents
//! like Claude Code to create and modify sketches programmatically.
//!
//! 
//!
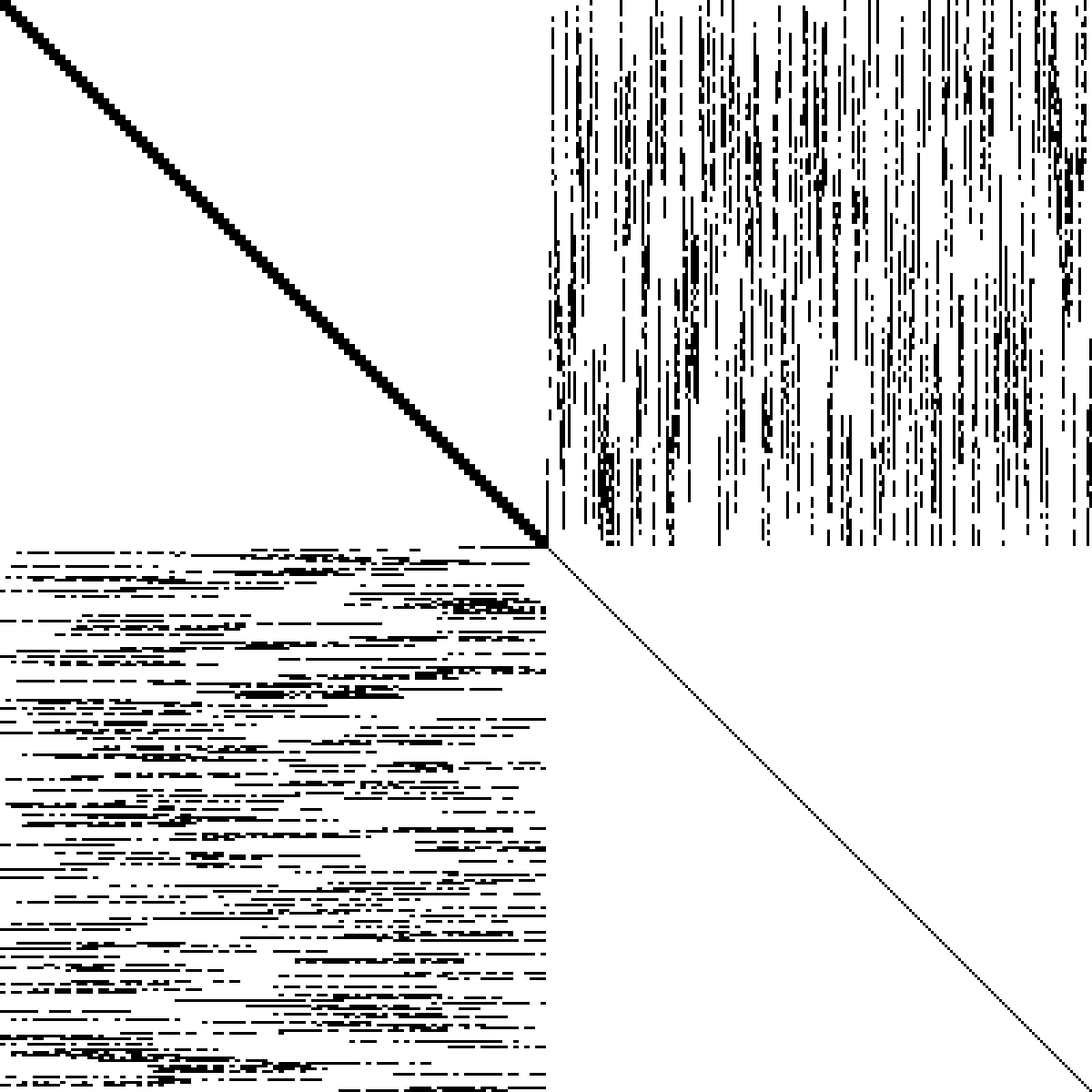
//! # Example: SLAM Constraints
//!
//! For multi-body optimization (SLAM, bundle adjustment), define model
//! hierarchies with constraints. The macro handles symbolic differentiation,
//! reference resolution, and code generation.
//!
//! 
//!
//! The sparsity pattern shows pose-pose blocks (upper-left), pose-landmark
//! coupling (off-diagonal), and landmark self-blocks (lower-right). Sparse
//! Cholesky exploits this for large speedups over dense.
//!
//! ```ignore
//! #[arael::model]
//! #[arael(constraint(hb_pose, guard = self.info.gps.is_some(), {
//! // GPS constraint (guarded -- only when data present)
//! let raw = pose.pos - pose.info.gps.pos;
//! let whitened = pose.info.gps.cov_r.transpose() * raw;
//! [gamma * atan(whitened.x * pose.info.gps.cov_isigma.x / gamma), ...]
//! }))]
//! #[arael(constraint(hb_pose, {
//! // Tilt sensor -- accelerometer constrains roll and pitch
//! [(pose.ea.x - pose.info.tilt_roll) * path.tilt_isigma,
//! (pose.ea.y - pose.info.tilt_pitch) * path.tilt_isigma]
//! }))]
//! struct Pose {
//! pos: Param<vect3f>,
//! ea: SimpleEulerAngleParam<f32>,
//! info: PoseInfo,
//! hb_pose: SelfBlock<Pose>,
//! }
//!
//! // Observation linking a landmark to a pose
//! #[arael::model]
//! #[arael(constraint(hb, parent=lm, {
//! let mr2w = pose.ea.rotation_matrix();
//! let lm_r = mr2w.transpose() * (lm.pos - pose.pos);
//! let r_f = feature.mf2r.transpose() * (lm_r - feature.camera_pos);
//! [gamma * atan(atan2(r_f.y, r_f.x) * feature.isigma.x / gamma),
//! gamma * atan(atan2(r_f.z, r_f.x) * feature.isigma.y / gamma)]
//! }))]
//! struct PointFrine {
//! #[arael(ref = root.poses)]
//! pose: Ref<Pose>,
//! #[arael(ref = pose.info.features)]
//! feature: Ref<PointFeature>,
//! hb: CrossBlock<PointLandmark, Pose>,
//! }
//! ```
//!
//! See [examples/slam_demo.rs](https://github.com/harakas/arael/blob/master/examples/slam_demo.rs) for the full 60-pose, 240-landmark SLAM demo
//! with GPS, odometry, tilt sensor, graduated optimization, and covariance
//! estimation.
//! See [docs/SLAM.md](https://github.com/harakas/arael/blob/master/docs/SLAM.md) for the full walkthrough.
//!
//! # Example: Localization
//!
//! Same model as SLAM but landmarks are fixed (known map). With only pose
//! parameters the hessian is block-tridiagonal, so the band solver gives
//! O(n) scaling -- 9.4x faster than dense at 500 poses.
//! See [examples/loc_demo.rs](https://github.com/harakas/arael/blob/master/examples/loc_demo.rs).
//!
//! # Examples
//!
//! The `examples/` directory is the primary place to see the API in use.
//! Each file is a runnable `cargo run --release --example <name>`.
//!
//! - **[`bench_band`](https://github.com/harakas/arael/blob/master/examples/bench_band.rs)**
//! -- benchmarks the band Cholesky backend against dense on the
//! localisation model at increasing pose counts. Prints timing +
//! speedup.
//! - **[`bench_investigate`](https://github.com/harakas/arael/blob/master/examples/bench_investigate.rs)**
//! -- deeper comparison of sparse backends (faer, schur) on the
//! SLAM model, with assembly vs solve breakdown and numeric
//! cross-check of the solutions.
//! - **[`bench_sparse`](https://github.com/harakas/arael/blob/master/examples/bench_sparse.rs)**
//! -- sparse Cholesky backends (faer / schur) vs dense on SLAM.
//! - **[`calc_demo`](https://github.com/harakas/arael/blob/master/examples/calc_demo.rs)**
//! -- `bc`-style REPL calculator built on `arael-sym`. Shows
//! `parse_with_functions` + `FunctionBag` for user-defined
//! functions, persistent history via rustyline.
//! - **[`jacobian_demo`](https://github.com/harakas/arael/blob/master/examples/jacobian_demo.rs)**
//! -- `#[arael(root, jacobian)]`, `#[arael(constraint_index)]`, and
//! `calc_jacobian` / `calc_cost_table` walk-through. End-to-end
//! reference for the instrumentation features referenced from
//! "My solve doesn't converge".
//! - **[`linear_demo`](https://github.com/harakas/arael/blob/master/examples/linear_demo.rs)**
//! -- robust linear regression on noisy 2D data. Residual wrapped
//! in `gamma * atan(r / gamma)` -- the Starship method
//! (US12346118), same robustifier used by the feature constraints
//! in loc/SLAM. Minimal single-struct model + LM fit, compared
//! against plain closed-form least squares.
//! - **[`loc_demo`](https://github.com/harakas/arael/blob/master/examples/loc_demo.rs)**
//! -- localisation with fixed known landmarks (no gauge freedom).
//! Block-tridiagonal Hessian + band solver. Graduated-isigma
//! optimisation via a root `frine_isigma_scale` field.
//! - **[`loc_global_demo`](https://github.com/harakas/arael/blob/master/examples/loc_global_demo.rs)**
//! -- how to put `Param` fields on the root struct and have
//! constraints consume them. Uses a system-global rigid transform
//! (translation + 3-axis rotation applied to every pose) as the
//! running example; every residual that reads the robot's world
//! pose composes the globals before evaluating. Shows the two
//! wiring shapes for pose<->root cross-Hessian pairs
//! (`CrossBlock<Pose, Path>` on the constraint struct, and a
//! root-owned `TripletBlock` named via the `root.<field>` block
//! spec) and a `Path::optimise_center` pass that freezes pose
//! params and optimises only the globals before the main sweep.
//! - **[`model_demo`](https://github.com/harakas/arael/blob/master/examples/model_demo.rs)**
//! -- minimal `#[arael::model]` walk-through showing how
//! `Param`, `SimpleEulerAngleParam`, and the update cycle fit
//! together.
//! - **[`refs_demo`](https://github.com/harakas/arael/blob/master/examples/refs_demo.rs)**
//! -- `Ref<T>`, `refs::Vec`, `refs::Deque`, and `refs::Arena`
//! behaviour: insertion, iteration, stable handles.
//! - **[`runtime_fit_demo`](https://github.com/harakas/arael/blob/master/examples/runtime_fit_demo.rs)**
//! -- curve fitting where the residual equation is a string parsed
//! at runtime. Demonstrates `ExtendedModel` + robust loss on top
//! of the symbolic front end.
//! - **[`single_root_demo`](https://github.com/harakas/arael/blob/master/examples/single_root_demo.rs)**
//! -- single-struct model-and-root + a direct-composed sub-model,
//! each carrying its own `SelfBlock<Self>`. The smallest example
//! that exercises the "root has its own params" path.
//! - **[`slam_demo`](https://github.com/harakas/arael/blob/master/examples/slam_demo.rs)**
//! -- synthetic visual-inertial SLAM: S-curve trajectory, 20 poses,
//! 40 landmarks, odometry + tilt + GPS + feature observations.
//! Full verbose-LM trace across graduated isigma passes -- the
//! reference for what a healthy solver run looks like.
//! - **[`sym_demo`](https://github.com/harakas/arael/blob/master/examples/sym_demo.rs)**
//! -- symbolic-math tour: expression building, automatic
//! differentiation, CSE, pretty printing, parsing. No solver
//! involvement; pure `arael-sym`.
//! - **[`user_function_demo`](https://github.com/harakas/arael/blob/master/examples/user_function_demo.rs)**
//! -- `#[arael::function]` for user-defined operators in
//! constraint bodies. Form A purely symbolic
//! `sigmoid(x) = 1 / (1 + exp(-x))` and Form B opaque numerical
//! `my_safe_asin` with a closed-form symbolic derivative, both
//! used in a single two-residual LM fit.
//!
//! # Crate structure
//!
//! - `arael-sym` -- symbolic math engine (expression trees, differentiation, CSE)
//! - `arael-macros` -- proc macros (`#[arael::model]`, `#[derive(Model)]`)
//! - `arael` (this crate) -- runtime: model traits, solvers, geometry, vectors
#[macro_use]
mod log;
/// Numeric traits (`Float`).
pub mod utils;
/// 2D and 3D vector types.
pub mod vect;
/// 3x3 and 2x2 matrix types with rotation and linear algebra.
pub mod matrix;
/// Quaternion type for 3D rotations.
pub mod quatern;
/// Type-safe indexed collections: `Ref`, `Vec`, `Deque`, `Arena`.
pub mod refs;
/// Runtime registry for user-defined functions declared via
/// `#[arael::function]`. Built from [`inventory`] submissions; see
/// [`user_fn::registry_bag`].
pub mod user_fn;
/// Re-export of the `inventory` crate. The `#[arael::function]` macro
/// expands to `::arael::inventory::submit!(...)` so user crates do
/// not need to depend on `inventory` directly.
#[doc(hidden)]
pub use inventory;
/// Re-export of the `arael-sym` symbolic math crate.
pub use arael_sym as sym;
/// Model trait, parameter types, and Hessian blocks.
pub mod model;
/// Levenberg-Marquardt solver with dense, band, and sparse backends.
pub mod simple_lm;
/// Camera model and geometric utilities.
pub mod geometry;
/// Re-export Jacobian types for convenient access.
pub use model::{Jacobian, JacobianRow, jacobian_entries};
/// The `sym!` auto-clone macro for symbolic expressions (from `arael-sym`).
pub use arael_sym::sym;
/// Derive macro for the `Model` trait.
pub use arael_macros::Model;
/// Attribute macro: `#[arael::model]`.
pub use arael_macros::model;
/// Attribute macro: `#[arael::function]`.
pub use arael_macros::function;