Expand description

![]()
Fast algorithms for generating voxel block meshes.
Two algorithms are included:
visible_block_faces: very fast but suboptimal meshesgreedy_quads: not quite as fast, but far fewer triangles are generated
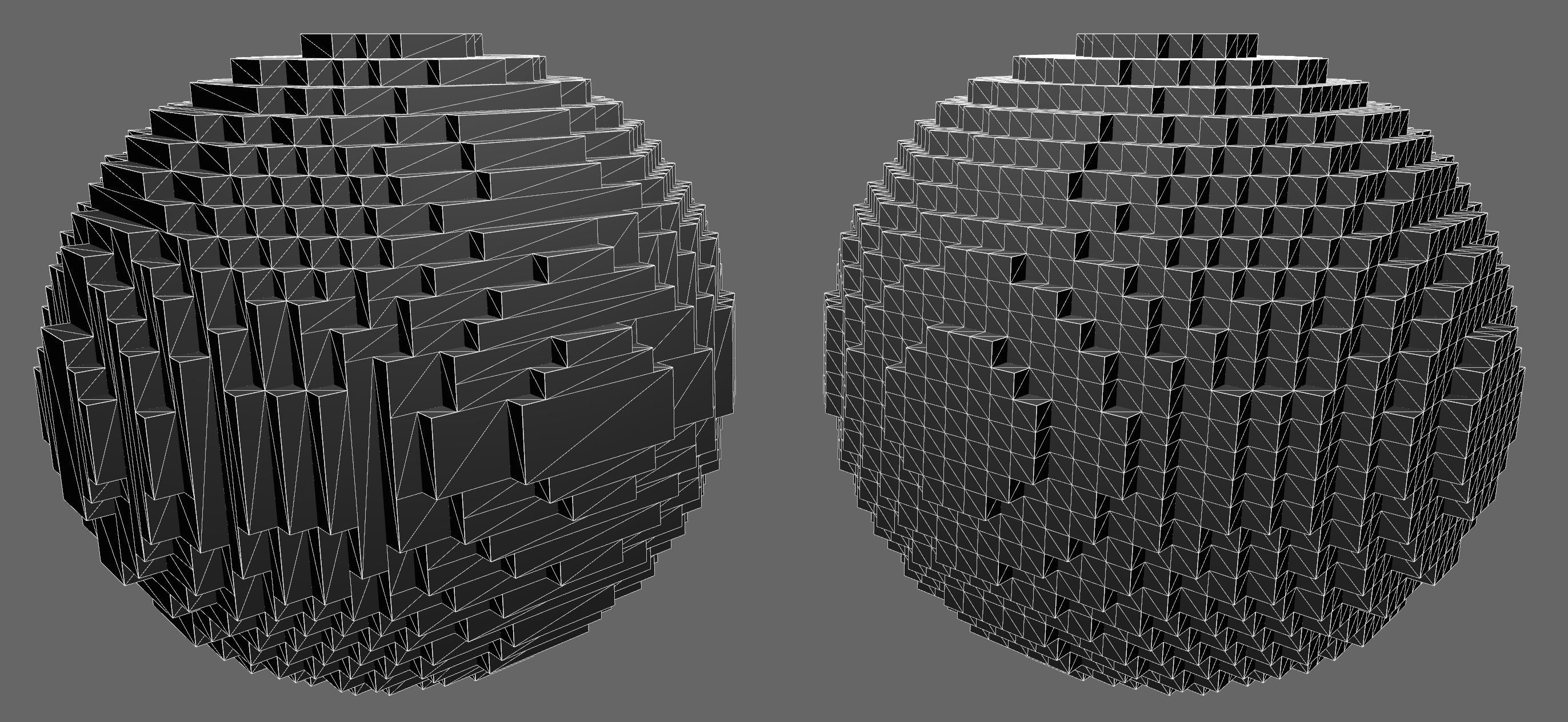
Benchmarks show that visible_block_faces generates about 40 million quads per second on a
single core of a 2.5 GHz Intel Core i7. Assuming spherical input data, greedy_quads can generate a
more optimal version of the same mesh with 1/3 of the quads, but it takes about 3 times longer. To run the benchmarks
yourself, cd bench/ && cargo bench.
§Example Code
use block_mesh::ndshape::{ConstShape, ConstShape3u32};
use block_mesh::{greedy_quads, GreedyQuadsBuffer, MergeVoxel, Voxel, VoxelVisibility, RIGHT_HANDED_Y_UP_CONFIG};
#[derive(Clone, Copy, Eq, PartialEq)]
struct BoolVoxel(bool);
const EMPTY: BoolVoxel = BoolVoxel(false);
const FULL: BoolVoxel = BoolVoxel(true);
impl Voxel for BoolVoxel {
fn get_visibility(&self) -> VoxelVisibility {
if *self == EMPTY {
VoxelVisibility::Empty
} else {
VoxelVisibility::Opaque
}
}
}
impl MergeVoxel for BoolVoxel {
type MergeValue = Self;
fn merge_value(&self) -> Self::MergeValue {
*self
}
}
// A 16^3 chunk with 1-voxel boundary padding.
type ChunkShape = ConstShape3u32<18, 18, 18>;
// This chunk will cover just a single octant of a sphere SDF (radius 15).
let mut voxels = [EMPTY; ChunkShape::SIZE as usize];
for i in 0..ChunkShape::SIZE {
let [x, y, z] = ChunkShape::delinearize(i);
voxels[i as usize] = if ((x * x + y * y + z * z) as f32).sqrt() < 15.0 {
FULL
} else {
EMPTY
};
}
let mut buffer = GreedyQuadsBuffer::new(voxels.len());
greedy_quads(
&voxels,
&ChunkShape {},
[0; 3],
[17; 3],
&RIGHT_HANDED_Y_UP_CONFIG.faces,
&mut buffer
);
// Some quads were generated.
assert!(buffer.quads.num_quads() > 0);Re-exports§
Modules§
- geometry
- Voxel geometry and coordinate systems.
Structs§
- Face
Strides - Greedy
Quads Buffer - Contains the output from the
greedy_quadsalgorithm. The quads can be used to generate a mesh. See the methods onOrientedBlockFaceandUnorientedQuadfor details. - Oriented
Block Face - Metadata that’s used to aid in the geometric calculations for one of the 6 possible cube faces.
- Quad
Buffer - Quad
Coordinate Config - A configuration of XYZ –> NUV axis mappings and orientations of the cube faces for a given coordinate system.
- Unit
Quad Buffer - Unoriented
Quad - The minimum voxel and size of a quad, without an orientation. To get the
actual corners of the quad, combine with an [
OrientedBlockFace]. - Unoriented
Unit Quad - A quad covering a single voxel (just a single block face), without an
orientation. To get the actual corners of the quad, combine with an
[
OrientedBlockFace]. - Voxel
Merger
Enums§
- Axis
- Either the X, Y, or Z axis.
- Axis
Permutation - One of the six possible
{N, U, V}–>{X, Y, Z}mappings. - Signed
Axis - Either the -X, +X, -Y, +Y, -Z, or +Z axis.
- Voxel
Visibility - Describes how this voxel influences mesh generation.
Constants§
- RIGHT_
HANDED_ Y_ UP_ CONFIG - Coordinate configuration for a right-handed coordinate system with Y up.
Traits§
- Merge
Strategy - A strategy for merging cube faces into quads.
- Merge
Voxel - Voxel
- Implement on your voxel types to inform the library how to generate geometry for this voxel.
Functions§
- greedy_
quads - The “Greedy Meshing” algorithm described by Mikola Lysenko in the 0fps article.
- greedy_
quads_ with_ merge_ strategy - Run the greedy meshing algorithm with a custom quad merging strategy using the
MergeStrategytrait. - visible_
block_ faces - A fast and simple meshing algorithm that produces a single quad for every visible face of a block.
- visible_
block_ faces_ with_ voxel_ view - Same as
visible_block_faces, with the additional ability to interpret the array as some other type. Use this if you want to mesh the same array multiple times with different sets of voxels being visible.