1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436 437 438 439 440 441 442 443 444 445 446 447 448 449 450 451 452 453 454 455 456 457 458 459 460 461 462 463 464 465 466 467 468 469 470 471 472 473 474 475 476 477 478 479 480 481 482 483 484 485 486 487 488 489 490 491 492 493 494 495 496 497 498 499 500 501 502 503 504 505 506 507 508 509 510 511 512 513 514 515 516 517 518 519 520 521 522 523 524 525 526 527 528 529 530 531 532 533 534 535 536 537 538 539 540 541 542 543 544 545 546 547 548 549 550 551 552 553 554 555 556 557 558 559 560 561 562 563 564 565 566 567 568 569 570 571 572 573 574 575 576 577 578 579 580 581 582 583 584 585 586 587 588 589 590 591 592 593 594 595 596 597 598 599 600 601 602 603 604 605 606 607 608 609 610 611 612 613 614 615 616 617 618 619 620 621 622 623 624 625 626 627 628 629 630 631 632 633 634 635 636 637 638 639 640 641 642 643 644 645 646 647 648 649 650 651 652 653 654 655 656 657 658 659 660 661 662 663 664 665 666 667 668 669 670 671 672 673 674 675 676 677 678 679 680 681 682 683 684 685 686 687 688 689 690 691 692 693 694 695 696 697 698 699 700 701 702 703 704 705 706 707 708 709 710 711 712 713 714 715 716 717 718 719 720 721 722 723 724 725 726 727 728 729 730 731 732 733 734 735 736 737 738 739 740 741 742 743 744 745 746 747 748 749 750 751 752 753 754 755 756 757 758 759 760 761 762 763 764 765 766 767 768 769 770 771 772 773 774 775 776 777 778 779 780 781 782 783 784 785 786 787 788 789 790 791 792 793 794 795 796 797 798 799 800 801 802 803 804 805 806 807 808 809 810 811 812 813 814 815 816 817 818 819 820 821 822 823 824 825 826 827 828 829 830 831 832 833 834 835 836 837 838 839 840 841 842 843 844 845 846 847 848 849 850 851 852 853 854 855 856 857 858 859 860 861 862 863 864 865 866 867 868 869 870 871 872 873 874 875 876 877 878 879 880 881 882 883 884 885 886 887 888 889 890 891 892 893 894 895 896 897 898 899 900 901 902 903 904 905 906 907 908 909 910 911 912 913 914 915 916 917 918 919 920 921 922 923 924 925 926 927 928 929 930 931 932 933 934 935 936 937 938 939 940 941 942 943 944 945 946 947 948 949 950 951 952 953 954 955 956 957 958 959 960 961 962 963 964 965 966 967 968 969 970 971 972 973 974 975 976 977 978 979 980 981 982 983 984 985 986 987 988 989 990 991 992 993 994 995 996 997 998 999 1000 1001 1002 1003 1004 1005 1006 1007 1008 1009 1010 1011 1012 1013 1014 1015 1016 1017 1018 1019 1020 1021 1022 1023 1024 1025 1026 1027 1028 1029 1030 1031 1032 1033 1034 1035 1036 1037 1038 1039 1040 1041 1042 1043 1044 1045 1046 1047 1048 1049 1050 1051 1052 1053 1054 1055 1056 1057 1058 1059 1060 1061 1062 1063 1064 1065 1066 1067 1068 1069 1070 1071 1072 1073 1074 1075 1076 1077 1078 1079 1080 1081 1082 1083 1084 1085 1086 1087 1088 1089 1090 1091 1092 1093 1094 1095 1096 1097 1098 1099 1100 1101 1102 1103 1104 1105 1106 1107 1108 1109 1110 1111 1112 1113 1114 1115 1116 1117 1118 1119 1120 1121 1122 1123 1124 1125 1126 1127 1128 1129 1130 1131 1132 1133 1134 1135 1136 1137 1138 1139 1140 1141 1142 1143 1144 1145 1146 1147 1148 1149 1150 1151 1152 1153 1154 1155 1156 1157 1158 1159 1160 1161 1162 1163 1164 1165 1166 1167 1168 1169 1170 1171 1172 1173 1174 1175 1176 1177 1178 1179 1180 1181 1182 1183 1184 1185 1186 1187 1188 1189 1190 1191 1192 1193 1194 1195 1196 1197 1198 1199 1200 1201 1202 1203 1204 1205 1206 1207 1208 1209 1210 1211 1212 1213 1214 1215 1216 1217 1218 1219 1220 1221 1222 1223 1224 1225 1226 1227 1228 1229 1230 1231 1232 1233 1234 1235 1236 1237 1238 1239 1240 1241 1242 1243 1244 1245 1246 1247 1248 1249 1250 1251 1252 1253 1254 1255 1256 1257 1258 1259 1260 1261 1262 1263 1264 1265 1266 1267 1268 1269 1270 1271 1272 1273 1274 1275 1276 1277 1278 1279 1280 1281 1282 1283 1284 1285 1286 1287 1288 1289 1290 1291 1292 1293 1294 1295 1296 1297 1298 1299 1300 1301 1302 1303 1304 1305 1306 1307 1308 1309 1310 1311 1312 1313 1314 1315 1316 1317 1318 1319 1320 1321 1322 1323 1324 1325 1326 1327 1328 1329 1330 1331 1332 1333 1334 1335 1336 1337 1338 1339 1340 1341 1342 1343 1344 1345 1346 1347 1348 1349 1350 1351 1352 1353 1354 1355 1356 1357 1358 1359 1360 1361 1362 1363 1364 1365 1366 1367 1368 1369 1370 1371 1372 1373 1374 1375 1376 1377 1378 1379 1380 1381 1382 1383 1384 1385 1386 1387 1388 1389 1390 1391 1392 1393 1394 1395 1396 1397 1398 1399 1400 1401 1402 1403 1404 1405 1406 1407 1408 1409 1410 1411 1412 1413 1414 1415 1416 1417 1418 1419 1420 1421 1422 1423 1424 1425 1426 1427 1428 1429 1430 1431 1432 1433 1434 1435 1436 1437 1438 1439 1440 1441 1442 1443 1444 1445 1446 1447 1448 1449 1450 1451 1452 1453 1454 1455 1456 1457 1458 1459 1460 1461 1462 1463 1464 1465 1466 1467 1468 1469 1470 1471 1472 1473 1474 1475 1476 1477 1478 1479 1480 1481 1482 1483 1484 1485 1486 1487 1488 1489 1490 1491 1492 1493 1494 1495 1496 1497 1498 1499 1500 1501 1502 1503 1504 1505 1506 1507 1508 1509 1510 1511 1512 1513 1514 1515 1516 1517 1518 1519 1520 1521 1522 1523 1524 1525 1526 1527 1528 1529 1530 1531 1532 1533 1534 1535 1536 1537 1538 1539 1540 1541 1542 1543 1544 1545 1546 1547 1548 1549 1550 1551 1552 1553 1554 1555 1556 1557 1558 1559 1560 1561 1562 1563 1564 1565 1566 1567 1568 1569 1570 1571 1572 1573 1574 1575 1576 1577 1578 1579 1580 1581 1582 1583 1584 1585 1586 1587 1588 1589 1590 1591 1592 1593 1594 1595 1596 1597 1598 1599 1600 1601 1602 1603 1604 1605 1606 1607 1608 1609 1610 1611 1612 1613 1614 1615 1616 1617 1618 1619 1620 1621 1622 1623 1624 1625 1626 1627 1628 1629 1630 1631 1632 1633 1634 1635 1636 1637 1638 1639 1640 1641 1642 1643 1644 1645 1646 1647 1648 1649 1650 1651 1652 1653 1654 1655 1656 1657 1658 1659 1660 1661 1662 1663 1664 1665 1666 1667 1668 1669 1670 1671 1672 1673 1674 1675 1676 1677 1678 1679 1680 1681 1682 1683 1684 1685 1686 1687 1688 1689 1690 1691 1692 1693 1694 1695 1696 1697 1698 1699 1700 1701 1702 1703 1704 1705 1706 1707 1708 1709 1710 1711 1712 1713 1714 1715 1716 1717 1718 1719 1720 1721 1722 1723 1724 1725 1726 1727 1728 1729 1730 1731 1732 1733 1734 1735 1736 1737 1738 1739 1740 1741 1742 1743 1744 1745 1746 1747 1748 1749 1750 1751 1752 1753 1754 1755 1756 1757 1758 1759 1760 1761 1762 1763 1764 1765 1766 1767 1768 1769 1770 1771 1772 1773 1774 1775 1776 1777 1778 1779 1780 1781 1782 1783 1784 1785 1786 1787 1788 1789 1790 1791 1792 1793 1794 1795 1796 1797 1798 1799 1800 1801 1802 1803 1804 1805 1806 1807 1808 1809 1810 1811 1812 1813 1814 1815 1816 1817 1818 1819 1820 1821 1822 1823 1824 1825 1826 1827 1828 1829 1830 1831 1832 1833 1834 1835 1836 1837 1838 1839 1840 1841 1842 1843 1844 1845 1846 1847 1848 1849 1850 1851 1852 1853 1854 1855 1856 1857 1858 1859 1860 1861 1862 1863 1864 1865 1866 1867 1868 1869 1870 1871 1872 1873 1874 1875 1876 1877 1878 1879 1880 1881 1882 1883 1884 1885 1886 1887 1888 1889 1890 1891 1892 1893 1894 1895 1896 1897 1898 1899 1900 1901 1902 1903 1904 1905 1906 1907 1908 1909 1910 1911 1912 1913 1914 1915 1916 1917 1918 1919 1920 1921 1922 1923 1924 1925 1926 1927 1928 1929 1930 1931 1932 1933 1934 1935 1936 1937 1938 1939 1940 1941 1942 1943 1944 1945 1946 1947 1948 1949 1950 1951 1952 1953 1954 1955 1956 1957 1958 1959 1960 1961 1962 1963 1964 1965 1966 1967 1968 1969 1970 1971 1972 1973 1974 1975 1976 1977 1978 1979 1980 1981 1982 1983 1984 1985 1986 1987 1988 1989 1990 1991 1992 1993 1994 1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 2017 2018 2019 2020 2021 2022 2023 2024 2025 2026 2027 2028 2029 2030 2031 2032 2033 2034 2035 2036 2037 2038 2039 2040 2041 2042 2043 2044 2045 2046 2047 2048 2049 2050 2051 2052 2053 2054 2055 2056 2057 2058 2059 2060 2061 2062 2063 2064 2065 2066 2067 2068 2069 2070 2071 2072 2073 2074 2075 2076 2077 2078 2079 2080 2081 2082 2083 2084 2085 2086 2087 2088 2089 2090 2091 2092 2093 2094 2095 2096 2097 2098 2099 2100 2101 2102 2103 2104 2105 2106 2107 2108 2109 2110 2111 2112 2113 2114 2115 2116 2117 2118 2119 2120 2121 2122 2123 2124 2125 2126 2127 2128 2129 2130 2131 2132 2133 2134 2135 2136 2137 2138 2139 2140 2141 2142 2143 2144 2145 2146 2147 2148 2149 2150 2151 2152 2153 2154 2155 2156 2157 2158 2159 2160 2161 2162 2163 2164 2165 2166 2167 2168 2169 2170 2171 2172 2173 2174 2175 2176 2177 2178 2179 2180 2181 2182 2183 2184 2185 2186 2187 2188 2189 2190 2191 2192 2193 2194 2195 2196 2197 2198 2199 2200 2201 2202 2203 2204 2205 2206 2207 2208 2209 2210 2211 2212 2213 2214 2215 2216 2217 2218 2219 2220 2221 2222 2223 2224 2225 2226 2227 2228 2229 2230 2231 2232 2233 2234 2235 2236 2237 2238 2239 2240 2241 2242 2243 2244 2245 2246 2247 2248 2249 2250 2251 2252 2253 2254 2255 2256 2257 2258 2259 2260 2261 2262 2263 2264 2265 2266 2267 2268 2269 2270 2271 2272 2273 2274 2275 2276 2277 2278 2279 2280 2281 2282 2283 2284 2285 2286 2287 2288 2289 2290 2291 2292 2293 2294 2295 2296 2297 2298 2299 2300 2301 2302 2303 2304 2305 2306 2307 2308 2309 2310 2311 2312 2313 2314 2315 2316 2317 2318 2319 2320 2321 2322 2323 2324 2325 2326 2327 2328 2329 2330 2331 2332 2333 2334 2335 2336 2337 2338 2339 2340 2341 2342 2343 2344 2345 2346 2347 2348 2349 2350 2351 2352 2353 2354 2355 2356 2357 2358 2359 2360 2361 2362 2363 2364 2365 2366 2367 2368 2369 2370 2371 2372 2373 2374 2375 2376 2377 2378 2379 2380 2381 2382 2383 2384 2385 2386 2387 2388 2389 2390 2391 2392 2393 2394 2395 2396 2397 2398 2399 2400 2401 2402 2403 2404 2405 2406 2407 2408 2409 2410 2411 2412 2413 2414 2415 2416 2417 2418 2419 2420 2421 2422 2423 2424 2425 2426 2427 2428 2429 2430 2431 2432 2433 2434 2435 2436 2437 2438 2439 2440 2441 2442 2443 2444 2445 2446 2447 2448 2449 2450 2451 2452 2453 2454 2455 2456 2457 2458 2459 2460 2461 2462 2463 2464 2465 2466 2467 2468 2469 2470 2471 2472 2473 2474 2475 2476 2477 2478 2479 2480 2481 2482 2483 2484 2485 2486 2487 2488 2489 2490 2491 2492 2493 2494 2495 2496 2497 2498 2499 2500 2501 2502 2503 2504 2505 2506 2507 2508 2509 2510 2511 2512 2513 2514 2515 2516 2517 2518 2519 2520 2521 2522 2523 2524 2525 2526 2527 2528 2529 2530 2531 2532 2533 2534 2535 2536 2537 2538 2539 2540 2541 2542 2543 2544 2545 2546 2547 2548 2549 2550 2551 2552 2553 2554 2555 2556 2557 2558 2559 2560 2561 2562 2563 2564 2565 2566 2567 2568 2569 2570 2571 2572 2573 2574 2575 2576 2577 2578 2579 2580 2581 2582 2583 2584 2585 2586 2587 2588 2589 2590 2591 2592 2593 2594 2595 2596 2597 2598 2599 2600 2601 2602 2603 2604 2605 2606 2607 2608 2609 2610 2611 2612 2613 2614 2615 2616 2617 2618 2619 2620 2621 2622 2623 2624 2625 2626 2627 2628 2629 2630 2631 2632 2633 2634 2635 2636 2637 2638 2639 2640 2641 2642 2643 2644 2645 2646 2647 2648 2649 2650 2651 2652 2653 2654 2655 2656 2657 2658 2659 2660 2661 2662 2663 2664 2665 2666 2667 2668 2669 2670 2671 2672 2673 2674 2675 2676 2677 2678 2679 2680 2681 2682 2683 2684 2685 2686 2687 2688 2689 2690 2691 2692 2693 2694 2695 2696 2697 2698 2699 2700 2701 2702 2703 2704 2705 2706 2707 2708 2709 2710 2711 2712 2713 2714 2715 2716 2717 2718 2719 2720 2721 2722 2723 2724 2725 2726 2727 2728 2729 2730 2731 2732 2733 2734 2735 2736 2737 2738 2739 2740 2741 2742 2743 2744 2745 2746 2747 2748 2749 2750 2751 2752 2753 2754 2755 2756 2757 2758 2759 2760 2761 2762 2763 2764 2765 2766 2767 2768 2769 2770 2771 2772 2773 2774 2775 2776 2777 2778 2779 2780 2781 2782 2783 2784 2785 2786 2787 2788 2789 2790 2791 2792 2793 2794 2795 2796 2797 2798 2799 2800 2801 2802 2803 2804 2805 2806 2807 2808 2809 2810 2811 2812 2813 2814 2815 2816 2817 2818 2819 2820 2821 2822 2823 2824 2825 2826 2827 2828 2829 2830 2831 2832 2833 2834 2835 2836 2837 2838 2839 2840 2841 2842 2843 2844 2845 2846 2847 2848 2849 2850 2851 2852 2853 2854 2855 2856 2857 2858 2859 2860 2861 2862 2863 2864 2865 2866 2867 2868 2869 2870 2871 2872 2873 2874 2875 2876 2877 2878 2879 2880 2881 2882 2883 2884 2885 2886 2887 2888 2889 2890 2891 2892 2893 2894 2895 2896 2897 2898 2899 2900 2901 2902 2903 2904 2905 2906 2907 2908 2909 2910 2911 2912 2913 2914 2915 2916 2917 2918 2919 2920 2921 2922 2923 2924 2925 2926 2927 2928 2929 2930 2931 2932 2933 2934 2935 2936 2937 2938 2939 2940 2941 2942 2943 2944 2945 2946 2947 2948 2949 2950 2951 2952 2953 2954 2955 2956 2957 2958 2959 2960 2961 2962 2963 2964 2965 2966 2967 2968 2969 2970 2971 2972 2973 2974 2975 2976 2977 2978 2979 2980 2981 2982 2983 2984 2985 2986 2987 2988 2989 2990 2991 2992 2993 2994 2995 2996 2997 2998 2999 3000 3001 3002 3003 3004 3005 3006 3007 3008 3009 3010 3011 3012 3013 3014 3015 3016 3017 3018 3019 3020 3021 3022 3023 3024 3025 3026 3027 3028 3029 3030 3031 3032 3033 3034 3035 3036 3037 3038 3039 3040 3041 3042 3043 3044 3045 3046 3047 3048 3049 3050 3051 3052 3053 3054 3055 3056 3057 3058 3059 3060 3061 3062 3063 3064 3065 3066 3067 3068 3069 3070 3071 3072 3073 3074 3075 3076 3077 3078 3079 3080 3081 3082 3083 3084 3085 3086 3087 3088 3089 3090 3091 3092 3093 3094 3095 3096 3097 3098 3099 3100 3101 3102 3103 3104 3105 3106 3107 3108 3109 3110 3111 3112 3113 3114 3115 3116 3117 3118 3119 3120 3121 3122 3123 3124 3125 3126 3127 3128 3129 3130 3131 3132 3133 3134 3135 3136 3137 3138 3139 3140 3141 3142 3143 3144 3145 3146 3147 3148 3149 3150 3151 3152 3153 3154 3155 3156 3157 3158 3159 3160 3161 3162 3163 3164 3165 3166 3167 3168 3169 3170 3171 3172 3173 3174 3175 3176 3177 3178 3179 3180 3181 3182 3183 3184 3185 3186 3187 3188 3189 3190 3191 3192 3193 3194 3195 3196 3197 3198 3199 3200 3201 3202 3203 3204 3205 3206 3207 3208 3209 3210 3211 3212 3213 3214 3215 3216 3217 3218 3219 3220 3221 3222 3223 3224 3225 3226 3227 3228 3229 3230 3231 3232 3233 3234 3235 3236 3237 3238 3239 3240 3241 3242 3243 3244 3245 3246 3247 3248 3249 3250 3251 3252 3253 3254 3255 3256 3257 3258 3259 3260 3261 3262 3263 3264 3265 3266 3267 3268 3269 3270 3271 3272 3273 3274 3275 3276 3277 3278 3279 3280 3281 3282 3283 3284 3285 3286 3287 3288 3289 3290 3291 3292 3293 3294 3295 3296 3297 3298 3299 3300 3301 3302 3303 3304 3305 3306 3307 3308 3309 3310 3311 3312 3313 3314 3315 3316 3317 3318 3319 3320 3321 3322 3323 3324 3325 3326 3327 3328 3329 3330 3331 3332 3333 3334 3335 3336 3337 3338 3339 3340 3341 3342 3343 3344 3345 3346 3347 3348 3349 3350 3351 3352 3353 3354 3355 3356 3357 3358 3359 3360 3361 3362 3363 3364 3365 3366 3367 3368 3369 3370 3371 3372 3373 3374 3375 3376 3377 3378 3379 3380 3381 3382 3383 3384 3385 3386 3387 3388 3389 3390 3391 3392 3393 3394 3395 3396 3397 3398 3399 3400 3401 3402 3403 3404 3405 3406 3407 3408 3409 3410 3411 3412 3413 3414 3415 3416 3417 3418 3419 3420 3421 3422 3423 3424 3425 3426 3427 3428 3429 3430 3431 3432 3433 3434 3435 3436 3437 3438 3439 3440 3441 3442 3443 3444 3445 3446 3447 3448 3449 3450 3451 3452 3453 3454 3455 3456 3457 3458 3459 3460 3461 3462 3463 3464 3465 3466 3467 3468 3469 3470 3471 3472 3473 3474 3475 3476 3477 3478 3479 3480 3481 3482 3483 3484 3485 3486 3487 3488 3489 3490 3491 3492 3493 3494 3495 3496 3497 3498 3499 3500 3501 3502 3503 3504 3505 3506 3507 3508 3509 3510 3511 3512 3513 3514 3515 3516 3517 3518 3519 3520 3521 3522 3523 3524 3525 3526 3527 3528 3529 3530 3531 3532 3533 3534 3535 3536 3537 3538 3539 3540 3541 3542 3543 3544 3545 3546 3547 3548 3549 3550 3551 3552 3553 3554 3555 3556 3557 3558 3559 3560 3561 3562 3563 3564 3565 3566 3567 3568 3569 3570 3571 3572 3573 3574 3575 3576 3577 3578 3579 3580 3581 3582 3583 3584 3585 3586 3587 3588 3589 3590 3591 3592 3593 3594 3595 3596 3597 3598 3599 3600 3601 3602 3603 3604 3605 3606 3607 3608 3609 3610 3611 3612 3613 3614 3615 3616 3617 3618 3619 3620 3621 3622 3623 3624 3625 3626 3627 3628 3629 3630 3631 3632 3633 3634 3635 3636 3637 3638 3639 3640 3641 3642 3643 3644 3645 3646 3647 3648 3649 3650 3651 3652 3653 3654 3655 3656 3657 3658 3659 3660 3661 3662 3663 3664 3665 3666 3667 3668 3669 3670 3671 3672 3673 3674 3675 3676 3677 3678 3679 3680 3681 3682 3683 3684 3685 3686 3687 3688 3689 3690 3691 3692 3693 3694 3695 3696 3697 3698 3699 3700 3701 3702 3703 3704 3705 3706 3707 3708 3709 3710 3711 3712 3713 3714 3715 3716 3717 3718 3719 3720 3721 3722 3723 3724 3725 3726 3727 3728 3729 3730 3731 3732 3733 3734 3735 3736 3737 3738 3739 3740 3741 3742 3743 3744 3745 3746 3747 3748 3749 3750 3751 3752 3753 3754 3755 3756 3757 3758 3759 3760 3761 3762 3763 3764 3765 3766 3767 3768 3769 3770 3771 3772 3773 3774 3775 3776 3777 3778 3779 3780 3781 3782 3783 3784 3785 3786 3787 3788 3789 3790 3791 3792 3793 3794 3795 3796 3797 3798 3799 3800 3801 3802 3803 3804 3805 3806 3807 3808 3809 3810 3811 3812 3813 3814 3815 3816 3817 3818 3819 3820 3821 3822 3823 3824 3825 3826 3827 3828 3829 3830 3831 3832 3833 3834 3835 3836 3837 3838 3839 3840 3841 3842 3843 3844 3845 3846 3847 3848 3849 3850 3851 3852 3853 3854 3855 3856 3857 3858 3859 3860 3861 3862 3863 3864 3865 3866 3867 3868 3869 3870 3871 3872 3873 3874 3875 3876 3877 3878 3879 3880 3881 3882 3883 3884 3885 3886 3887 3888 3889 3890 3891 3892 3893 3894 3895 3896 3897 3898 3899 3900 3901 3902 3903 3904 3905 3906 3907 3908 3909 3910 3911 3912 3913 3914 3915 3916 3917 3918 3919 3920 3921 3922 3923 3924 3925 3926 3927 3928 3929 3930 3931 3932 3933 3934 3935 3936 3937 3938 3939 3940 3941 3942 3943 3944 3945 3946 3947 3948 3949 3950 3951 3952 3953 3954 3955 3956 3957 3958 3959 3960 3961 3962 3963 3964 3965 3966 3967 3968 3969 3970 3971 3972 3973 3974 3975 3976 3977 3978 3979 3980 3981 3982 3983 3984 3985 3986 3987 3988 3989 3990 3991 3992 3993 3994 3995 3996 3997 3998 3999 4000 4001 4002 4003 4004 4005 4006 4007 4008 4009 4010 4011 4012 4013 4014 4015 4016 4017 4018 4019 4020 4021 4022 4023 4024 4025 4026 4027 4028 4029 4030 4031 4032 4033 4034 4035 4036 4037 4038 4039 4040 4041 4042 4043 4044 4045 4046 4047 4048 4049 4050 4051 4052 4053 4054 4055 4056 4057 4058 4059 4060 4061 4062 4063 4064 4065 4066 4067 4068 4069 4070 4071 4072 4073 4074 4075 4076 4077 4078 4079 4080 4081 4082 4083 4084 4085 4086 4087 4088 4089 4090 4091 4092 4093 4094 4095 4096 4097 4098 4099 4100 4101 4102 4103 4104 4105 4106 4107 4108 4109 4110 4111 4112 4113 4114 4115 4116 4117 4118 4119 4120 4121 4122 4123 4124 4125 4126 4127 4128 4129 4130 4131 4132 4133 4134 4135 4136 4137 4138 4139 4140 4141 4142 4143 4144 4145 4146 4147 4148 4149 4150 4151 4152 4153 4154 4155 4156 4157 4158 4159 4160 4161 4162 4163 4164 4165 4166 4167 4168 4169 4170 4171 4172 4173 4174 4175 4176 4177 4178 4179 4180 4181 4182 4183 4184 4185 4186 4187 4188 4189 4190 4191 4192 4193 4194 4195 4196 4197 4198 4199 4200 4201 4202 4203 4204 4205 4206 4207 4208 4209 4210 4211 4212 4213 4214 4215 4216 4217 4218 4219 4220 4221 4222 4223 4224 4225 4226 4227 4228 4229 4230 4231 4232 4233 4234 4235 4236 4237 4238 4239 4240 4241 4242 4243 4244 4245 4246 4247 4248 4249 4250 4251 4252 4253 4254 4255 4256 4257 4258 4259 4260 4261 4262 4263 4264 4265 4266 4267 4268 4269 4270 4271 4272 4273 4274 4275 4276 4277 4278 4279 4280 4281 4282 4283 4284 4285 4286 4287 4288 4289 4290 4291 4292 4293 4294 4295 4296 4297 4298 4299 4300 4301 4302 4303 4304 4305 4306 4307 4308 4309 4310 4311 4312 4313 4314 4315 4316 4317 4318 4319 4320 4321 4322 4323 4324 4325 4326 4327 4328 4329 4330 4331 4332 4333 4334 4335 4336 4337 4338 4339 4340 4341 4342 4343 4344 4345 4346 4347 4348 4349 4350 4351 4352 4353 4354 4355 4356 4357 4358 4359 4360 4361 4362 4363 4364 4365 4366 4367 4368 4369 4370 4371 4372 4373 4374 4375 4376 4377 4378 4379 4380 4381 4382 4383 4384 4385 4386 4387 4388 4389 4390 4391 4392 4393 4394 4395 4396 4397 4398 4399 4400 4401 4402 4403 4404 4405 4406 4407 4408 4409 4410 4411 4412 4413 4414 4415 4416 4417 4418 4419 4420 4421 4422 4423 4424 4425 4426 4427 4428 4429 4430 4431 4432 4433 4434 4435 4436 4437 4438 4439 4440 4441 4442 4443 4444 4445 4446 4447 4448 4449 4450 4451 4452 4453 4454 4455 4456 4457 4458 4459 4460 4461 4462 4463 4464 4465 4466 4467 4468 4469 4470 4471 4472 4473 4474 4475 4476 4477 4478 4479 4480 4481 4482 4483 4484 4485 4486 4487 4488 4489 4490 4491 4492 4493 4494 4495 4496 4497 4498 4499 4500 4501 4502 4503 4504 4505 4506 4507 4508 4509 4510 4511 4512 4513 4514 4515 4516 4517 4518 4519 4520 4521 4522 4523 4524 4525 4526 4527 4528 4529 4530 4531 4532 4533 4534 4535 4536 4537 4538 4539 4540 4541 4542 4543 4544 4545 4546 4547 4548 4549 4550 4551 4552 4553 4554 4555 4556 4557 4558 4559 4560 4561 4562 4563 4564 4565 4566 4567 4568 4569 4570 4571 4572 4573 4574 4575 4576 4577 4578 4579 4580 4581 4582 4583 4584 4585 4586 4587 4588 4589 4590 4591 4592 4593 4594 4595 4596 4597 4598 4599 4600 4601 4602 4603 4604 4605 4606 4607 4608 4609 4610 4611 4612 4613 4614 4615 4616 4617 4618 4619 4620 4621 4622 4623 4624 4625 4626 4627 4628 4629 4630 4631 4632 4633 4634 4635 4636 4637 4638 4639 4640 4641 4642 4643 4644 4645 4646 4647 4648 4649 4650 4651 4652 4653 4654 4655 4656 4657 4658 4659 4660 4661 4662 4663 4664 4665 4666 4667 4668 4669 4670 4671 4672 4673 4674 4675 4676 4677 4678 4679 4680 4681 4682 4683 4684 4685 4686 4687 4688 4689 4690 4691 4692 4693 4694 4695 4696 4697 4698 4699 4700 4701 4702 4703 4704 4705 4706 4707 4708 4709 4710 4711 4712 4713 4714 4715 4716 4717 4718 4719 4720 4721 4722 4723 4724 4725 4726 4727 4728 4729 4730 4731 4732 4733 4734 4735 4736 4737 4738 4739 4740 4741 4742 4743 4744 4745 4746 4747 4748 4749 4750 4751 4752 4753 4754 4755 4756 4757 4758 4759 4760 4761 4762 4763 4764 4765 4766 4767 4768 4769 4770 4771 4772 4773 4774 4775 4776 4777 4778 4779 4780 4781 4782 4783 4784 4785 4786 4787 4788 4789 4790 4791 4792 4793 4794 4795 4796 4797 4798 4799 4800 4801 4802 4803 4804 4805 4806 4807 4808 4809 4810 4811 4812 4813 4814 4815 4816 4817 4818 4819 4820 4821 4822 4823 4824 4825 4826 4827 4828 4829 4830 4831 4832 4833 4834 4835 4836 4837 4838 4839 4840 4841 4842 4843 4844 4845 4846 4847 4848 4849 4850 4851 4852 4853 4854 4855 4856 4857 4858 4859 4860 4861 4862 4863 4864 4865 4866 4867 4868 4869 4870 4871 4872 4873 4874 4875 4876 4877 4878 4879 4880 4881 4882 4883 4884 4885 4886 4887 4888 4889 4890 4891 4892 4893 4894 4895 4896 4897 4898 4899 4900 4901 4902 4903 4904 4905 4906 4907 4908 4909 4910 4911 4912 4913 4914 4915 4916 4917 4918 4919 4920 4921 4922 4923 4924 4925 4926 4927 4928 4929 4930 4931 4932 4933 4934 4935 4936 4937 4938 4939 4940 4941 4942 4943 4944 4945 4946 4947 4948 4949 4950 4951 4952 4953 4954 4955 4956 4957 4958 4959 4960 4961 4962 4963 4964 4965 4966 4967 4968 4969 4970 4971 4972 4973 4974 4975 4976 4977 4978 4979 4980 4981 4982 4983 4984 4985 4986 4987 4988 4989 4990 4991 4992 4993 4994 4995 4996 4997 4998 4999 5000 5001 5002 5003 5004 5005 5006 5007 5008 5009 5010 5011 5012 5013 5014 5015 5016 5017 5018 5019 5020 5021 5022 5023 5024 5025 5026 5027 5028 5029 5030 5031 5032 5033 5034 5035 5036 5037 5038 5039 5040 5041 5042 5043 5044 5045 5046 5047 5048 5049 5050 5051 5052 5053 5054 5055 5056 5057 5058 5059 5060 5061 5062 5063 5064 5065 5066 5067 5068 5069 5070 5071 5072 5073 5074 5075 5076 5077 5078 5079 5080 5081 5082 5083 5084 5085 5086 5087 5088 5089 5090 5091 5092 5093 5094 5095 5096 5097 5098 5099 5100 5101 5102 5103 5104 5105 5106 5107 5108 5109 5110 5111 5112 5113 5114 5115 5116 5117 5118 5119 5120 5121 5122 5123 5124 5125 5126 5127 5128 5129 5130 5131 5132 5133 5134 5135 5136 5137 5138 5139 5140 5141 5142 5143 5144 5145 5146 5147 5148 5149 5150 5151 5152 5153 5154 5155 5156 5157 5158 5159 5160 5161 5162 5163 5164 5165 5166 5167 5168 5169 5170 5171 5172 5173 5174 5175 5176 5177 5178 5179 5180 5181 5182 5183 5184 5185 5186 5187 5188 5189 5190 5191 5192 5193 5194 5195 5196 5197 5198 5199 5200 5201 5202 5203 5204 5205 5206 5207 5208 5209 5210 5211 5212 5213 5214 5215 5216 5217 5218 5219 5220 5221 5222 5223 5224 5225 5226 5227 5228 5229 5230 5231 5232 5233 5234 5235 5236 5237 5238 5239 5240 5241 5242 5243 5244 5245 5246 5247 5248 5249 5250 5251 5252 5253 5254 5255 5256 5257 5258 5259 5260 5261 5262 5263 5264 5265 5266 5267 5268 5269 5270 5271 5272 5273 5274 5275 5276 5277 5278 5279 5280 5281 5282 5283 5284 5285 5286 5287 5288 5289 5290 5291 5292 5293 5294 5295 5296 5297 5298 5299 5300 5301 5302 5303 5304 5305 5306 5307 5308 5309 5310 5311 5312 5313 5314 5315 5316 5317 5318 5319 5320 5321 5322 5323 5324 5325 5326 5327 5328 5329 5330 5331 5332 5333 5334 5335 5336 5337 5338 5339 5340 5341 5342 5343 5344 5345 5346 5347 5348 5349 5350 5351 5352 5353 5354 5355 5356 5357 5358 5359 5360 5361 5362 5363 5364 5365 5366 5367 5368 5369 5370 5371 5372 5373 5374 5375 5376 5377 5378 5379 5380 5381 5382 5383 5384 5385 5386 5387 5388 5389 5390 5391 5392 5393 5394 5395 5396 5397 5398 5399 5400 5401 5402 5403 5404 5405 5406 5407 5408 5409 5410 5411 5412 5413 5414 5415 5416 5417 5418 5419 5420 5421 5422 5423 5424 5425 5426 5427 5428 5429 5430 5431 5432 5433 5434 5435 5436 5437 5438 5439 5440 5441 5442 5443 5444 5445 5446 5447 5448 5449 5450 5451 5452 5453 5454 5455 5456 5457 5458 5459 5460 5461 5462 5463 5464 5465 5466 5467 5468 5469 5470 5471 5472 5473 5474 5475 5476 5477 5478 5479 5480 5481 5482 5483 5484 5485 5486 5487 5488 5489 5490 5491 5492 5493 5494 5495 5496 5497 5498 5499 5500 5501 5502 5503 5504 5505 5506 5507 5508 5509 5510 5511 5512 5513 5514 5515 5516 5517 5518 5519 5520 5521 5522 5523 5524 5525 5526 5527 5528 5529 5530 5531 5532 5533 5534 5535 5536 5537 5538 5539 5540 5541 5542 5543 5544 5545 5546 5547 5548 5549 5550 5551 5552 5553 5554 5555 5556 5557 5558 5559 5560 5561 5562 5563 5564 5565 5566 5567 5568 5569 5570 5571 5572 5573 5574 5575 5576 5577 5578 5579 5580 5581 5582 5583 5584 5585 5586 5587 5588 5589 5590 5591 5592 5593 5594 5595 5596 5597 5598 5599 5600 5601 5602 5603 5604 5605 5606 5607 5608 5609 5610 5611 5612 5613 5614 5615 5616 5617 5618 5619 5620 5621 5622 5623 5624 5625 5626 5627 5628 5629 5630 5631 5632 5633 5634 5635 5636 5637 5638 5639 5640 5641 5642 5643 5644 5645 5646 5647 5648 5649 5650 5651 5652 5653 5654 5655 5656 5657 5658 5659 5660 5661 5662 5663 5664 5665 5666 5667 5668 5669 5670 5671 5672 5673 5674 5675 5676 5677 5678 5679 5680 5681 5682 5683 5684 5685 5686 5687 5688 5689 5690 5691 5692 5693 5694 5695 5696 5697 5698 5699 5700 5701 5702 5703 5704 5705 5706 5707 5708 5709 5710 5711 5712 5713 5714 5715 5716 5717 5718 5719 5720 5721 5722 5723 5724 5725 5726 5727 5728 5729 5730 5731 5732 5733 5734 5735 5736 5737 5738 5739 5740 5741 5742 5743 5744 5745 5746 5747 5748 5749 5750 5751 5752 5753 5754 5755 5756 5757 5758 5759 5760 5761 5762 5763 5764 5765 5766 5767 5768 5769 5770 5771 5772 5773 5774 5775 5776 5777 5778 5779 5780 5781 5782 5783 5784 5785 5786 5787 5788 5789 5790 5791 5792 5793 5794 5795 5796 5797 5798 5799 5800 5801 5802 5803 5804 5805 5806 5807 5808 5809 5810 5811 5812 5813 5814 5815 5816 5817 5818 5819 5820 5821 5822 5823 5824 5825 5826 5827 5828 5829 5830 5831 5832 5833 5834 5835 5836 5837 5838 5839 5840 5841 5842 5843 5844 5845 5846 5847 5848 5849 5850 5851 5852 5853 5854 5855 5856 5857 5858 5859 5860 5861 5862 5863 5864 5865 5866 5867 5868 5869 5870 5871 5872 5873 5874 5875 5876 5877 5878 5879 5880 5881 5882 5883 5884 5885 5886 5887 5888 5889 5890 5891 5892 5893 5894 5895 5896 5897 5898 5899 5900 5901 5902 5903 5904 5905 5906 5907 5908 5909 5910 5911 5912 5913 5914 5915 5916 5917 5918 5919 5920 5921 5922 5923 5924 5925 5926 5927 5928 5929 5930 5931 5932 5933 5934 5935 5936 5937 5938 5939 5940 5941 5942 5943 5944 5945 5946 5947 5948 5949 5950 5951 5952 5953 5954 5955 5956 5957 5958 5959 5960 5961 5962 5963 5964 5965 5966 5967 5968 5969 5970 5971 5972 5973 5974 5975 5976 5977 5978 5979 5980 5981 5982 5983 5984 5985 5986 5987 5988 5989 5990 5991 5992 5993 5994 5995 5996 5997 5998 5999 6000 6001 6002 6003 6004 6005 6006 6007 6008 6009 6010 6011 6012 6013 6014 6015 6016 6017 6018 6019 6020 6021 6022 6023 6024 6025 6026 6027 6028 6029 6030 6031 6032 6033 6034 6035 6036 6037 6038 6039 6040 6041 6042 6043 6044 6045 6046 6047 6048 6049 6050 6051 6052 6053 6054 6055 6056 6057 6058 6059 6060 6061 6062 6063 6064 6065 6066 6067 6068 6069 6070 6071 6072 6073 6074 6075 6076 6077 6078 6079 6080 6081 6082 6083 6084 6085 6086 6087 6088 6089 6090 6091 6092 6093 6094 6095 6096 6097 6098 6099 6100 6101 6102 6103 6104 6105 6106 6107 6108 6109 6110 6111 6112 6113 6114 6115 6116 6117 6118 6119 6120 6121 6122 6123 6124 6125 6126 6127 6128 6129 6130 6131 6132 6133 6134 6135 6136 6137 6138 6139 6140 6141 6142 6143 6144 6145 6146 6147 6148 6149 6150 6151 6152 6153 6154 6155 6156 6157 6158 6159 6160 6161 6162 6163 6164 6165 6166 6167 6168 6169 6170 6171 6172 6173 6174 6175 6176 6177 6178 6179 6180 6181 6182 6183 6184 6185 6186 6187 6188 6189 6190 6191 6192 6193 6194 6195 6196 6197 6198 6199 6200 6201 6202 6203 6204 6205 6206 6207 6208 6209 6210 6211 6212 6213 6214 6215 6216 6217 6218 6219 6220 6221 6222 6223 6224 6225 6226 6227 6228 6229 6230 6231 6232 6233 6234 6235 6236 6237 6238 6239 6240 6241 6242 6243 6244 6245 6246 6247 6248 6249 6250 6251 6252 6253 6254 6255 6256 6257 6258 6259 6260 6261 6262 6263 6264 6265 6266 6267 6268 6269 6270 6271 6272 6273 6274 6275 6276 6277 6278 6279 6280 6281 6282 6283 6284 6285 6286 6287 6288 6289 6290 6291 6292 6293 6294 6295 6296 6297 6298 6299 6300 6301 6302 6303 6304 6305 6306 6307 6308 6309 6310 6311 6312 6313 6314 6315 6316 6317 6318 6319 6320 6321 6322 6323 6324 6325 6326 6327 6328 6329 6330 6331 6332 6333 6334 6335 6336 6337 6338 6339 6340 6341 6342 6343 6344 6345 6346 6347 6348 6349 6350 6351 6352 6353 6354 6355 6356 6357 6358 6359 6360 6361 6362 6363 6364 6365 6366 6367 6368 6369 6370 6371 6372 6373 6374 6375 6376 6377 6378 6379 6380 6381 6382 6383 6384 6385 6386 6387 6388 6389 6390 6391 6392 6393 6394 6395 6396 6397 6398 6399 6400 6401 6402 6403 6404 6405 6406 6407 6408 6409 6410 6411 6412 6413 6414 6415 6416 6417 6418 6419 6420 6421 6422 6423 6424 6425 6426 6427 6428 6429 6430 6431 6432 6433 6434 6435 6436 6437 6438 6439 6440 6441 6442 6443 6444 6445 6446 6447 6448 6449 6450 6451 6452 6453 6454 6455 6456 6457 6458 6459 6460 6461 6462 6463 6464 6465 6466 6467 6468 6469 6470 6471 6472 6473 6474 6475 6476 6477 6478 6479 6480 6481 6482 6483 6484 6485 6486 6487 6488 6489 6490 6491 6492 6493 6494 6495 6496 6497 6498 6499 6500 6501 6502 6503 6504 6505 6506 6507 6508 6509 6510 6511 6512 6513 6514 6515 6516 6517 6518 6519 6520 6521 6522 6523 6524 6525 6526 6527 6528 6529 6530 6531 6532 6533 6534 6535 6536 6537 6538 6539 6540 6541 6542 6543 6544 6545 6546 6547 6548 6549 6550 6551 6552 6553 6554 6555 6556 6557 6558 6559 6560 6561 6562 6563 6564 6565 6566 6567 6568 6569 6570 6571 6572 6573 6574 6575 6576 6577 6578 6579 6580 6581 6582 6583 6584 6585 6586 6587 6588 6589 6590 6591 6592 6593 6594 6595 6596 6597 6598 6599 6600 6601 6602 6603 6604 6605 6606 6607 6608 6609 6610 6611 6612 6613 6614 6615 6616 6617 6618 6619 6620 6621 6622 6623 6624 6625 6626 6627 6628 6629 6630 6631 6632 6633 6634 6635 6636 6637 6638 6639 6640 6641 6642 6643 6644 6645 6646 6647 6648 6649 6650 6651 6652 6653 6654 6655 6656 6657 6658 6659 6660 6661 6662 6663 6664 6665 6666 6667 6668 6669 6670 6671 6672 6673 6674 6675 6676 6677 6678 6679 6680 6681 6682 6683 6684 6685 6686 6687 6688 6689 6690 6691 6692 6693 6694 6695 6696 6697 6698 6699 6700 6701 6702 6703 6704 6705 6706 6707 6708 6709 6710 6711 6712 6713 6714 6715 6716 6717 6718 6719 6720 6721 6722 6723 6724 6725 6726 6727 6728 6729 6730 6731 6732 6733 6734 6735 6736 6737 6738 6739 6740 6741 6742 6743 6744 6745 6746 6747 6748 6749 6750 6751 6752 6753 6754 6755 6756 6757 6758 6759 6760 6761 6762 6763 6764 6765 6766 6767 6768 6769 6770 6771 6772 6773 6774 6775 6776 6777 6778 6779 6780 6781 6782 6783 6784 6785 6786 6787 6788 6789 6790 6791 6792 6793 6794 6795 6796 6797 6798 6799 6800 6801 6802 6803 6804 6805 6806 6807 6808 6809 6810 6811 6812 6813 6814 6815 6816 6817 6818 6819 6820 6821 6822 6823 6824 6825 6826 6827 6828 6829 6830 6831 6832 6833 6834 6835 6836 6837 6838 6839 6840 6841 6842 6843 6844 6845 6846 6847 6848 6849 6850 6851 6852 6853 6854 6855 6856 6857 6858 6859 6860 6861 6862 6863 6864 6865 6866 6867 6868 6869 6870 6871 6872 6873 6874 6875 6876 6877 6878 6879 6880 6881 6882 6883 6884 6885 6886 6887 6888 6889 6890 6891 6892 6893 6894 6895 6896 6897 6898 6899 6900 6901 6902 6903 6904 6905 6906 6907 6908 6909 6910 6911 6912 6913 6914 6915 6916 6917 6918 6919 6920 6921 6922 6923 6924 6925 6926 6927 6928 6929 6930 6931 6932 6933 6934 6935 6936 6937 6938 6939 6940 6941 6942 6943 6944 6945 6946 6947 6948 6949 6950 6951 6952 6953 6954 6955 6956 6957 6958 6959 6960 6961 6962 6963 6964 6965 6966 6967 6968 6969 6970 6971 6972 6973 6974 6975 6976 6977 6978 6979 6980 6981 6982 6983 6984 6985 6986 6987 6988 6989 6990 6991 6992 6993 6994 6995 6996 6997 6998 6999 7000 7001 7002 7003 7004 7005 7006 7007 7008 7009 7010 7011 7012 7013 7014 7015 7016 7017 7018 7019 7020 7021 7022 7023 7024 7025 7026 7027 7028 7029 7030 7031 7032 7033 7034 7035 7036 7037 7038 7039 7040 7041 7042 7043 7044 7045 7046 7047 7048 7049 7050 7051 7052 7053 7054 7055 7056 7057 7058 7059 7060 7061 7062 7063 7064 7065 7066 7067 7068 7069 7070 7071 7072 7073 7074 7075 7076 7077 7078 7079 7080 7081 7082 7083 7084 7085 7086 7087 7088 7089 7090 7091 7092 7093 7094 7095 7096 7097 7098 7099 7100 7101 7102 7103 7104 7105 7106 7107 7108 7109 7110 7111 7112 7113 7114 7115 7116 7117 7118 7119 7120 7121 7122 7123 7124 7125 7126 7127 7128 7129 7130 7131 7132 7133 7134 7135 7136 7137 7138 7139 7140 7141 7142 7143 7144 7145 7146 7147 7148 7149 7150 7151 7152 7153 7154 7155 7156 7157 7158 7159 7160 7161 7162 7163 7164 7165 7166 7167 7168 7169 7170 7171 7172 7173 7174 7175 7176 7177 7178 7179 7180 7181 7182 7183 7184 7185 7186 7187 7188 7189 7190 7191 7192 7193 7194 7195 7196 7197 7198 7199 7200 7201 7202 7203 7204 7205 7206 7207 7208 7209 7210 7211 7212 7213 7214 7215 7216 7217 7218 7219 7220 7221 7222 7223 7224 7225 7226 7227 7228 7229 7230 7231 7232 7233 7234 7235 7236 7237 7238 7239 7240 7241 7242 7243 7244 7245 7246 7247 7248 7249 7250 7251 7252 7253 7254 7255 7256 7257 7258 7259 7260 7261 7262 7263 7264 7265 7266 7267 7268 7269 7270 7271 7272 7273 7274 7275 7276 7277 7278 7279 7280 7281 7282 7283 7284 7285 7286 7287 7288 7289 7290 7291 7292 7293 7294 7295 7296 7297 7298 7299 7300 7301 7302 7303 7304 7305 7306 7307 7308 7309 7310 7311 7312 7313 7314 7315 7316 7317 7318 7319 7320 7321 7322 7323 7324 7325 7326 7327 7328 7329 7330 7331 7332 7333 7334 7335 7336 7337 7338 7339 7340 7341 7342 7343 7344 7345 7346 7347 7348 7349 7350 7351 7352 7353 7354 7355 7356 7357 7358 7359 7360 7361 7362 7363 7364 7365 7366 7367 7368 7369 7370 7371 7372 7373 7374 7375 7376 7377 7378 7379 7380 7381 7382 7383 7384 7385 7386 7387 7388 7389 7390 7391 7392 7393 7394 7395 7396 7397 7398 7399 7400 7401 7402 7403 7404 7405 7406 7407 7408 7409 7410 7411 7412 7413 7414 7415 7416 7417 7418 7419 7420 7421 7422 7423 7424 7425 7426 7427 7428 7429 7430 7431 7432 7433 7434 7435 7436 7437 7438 7439 7440 7441 7442 7443 7444 7445 7446 7447 7448 7449 7450 7451 7452 7453 7454 7455 7456 7457 7458 7459 7460 7461 7462 7463 7464 7465 7466 7467 7468 7469 7470 7471 7472 7473 7474 7475 7476 7477 7478 7479 7480 7481 7482 7483 7484 7485 7486 7487 7488 7489 7490 7491 7492 7493 7494 7495 7496 7497 7498 7499 7500 7501 7502 7503 7504 7505 7506 7507 7508 7509 7510 7511 7512 7513 7514 7515 7516 7517 7518 7519 7520 7521 7522 7523 7524 7525 7526 7527 7528 7529 7530 7531 7532 7533 7534 7535 7536 7537 7538 7539 7540 7541 7542 7543 7544 7545 7546 7547 7548 7549 7550 7551 7552 7553 7554 7555 7556 7557 7558 7559 7560 7561 7562 7563 7564 7565 7566 7567 7568 7569 7570 7571 7572 7573 7574 7575 7576 7577 7578 7579 7580 7581 7582 7583 7584 7585 7586 7587 7588 7589 7590 7591 7592 7593 7594 7595 7596 7597 7598 7599 7600 7601 7602 7603 7604 7605 7606 7607 7608 7609 7610 7611 7612 7613 7614 7615 7616 7617 7618 7619 7620 7621 7622 7623 7624 7625 7626 7627 7628 7629 7630 7631 7632 7633 7634 7635 7636 7637 7638 7639 7640 7641 7642 7643 7644 7645 7646 7647 7648 7649 7650 7651 7652 7653 7654 7655 7656 7657 7658 7659 7660 7661 7662 7663 7664 7665 7666 7667 7668 7669 7670 7671 7672 7673 7674 7675 7676 7677 7678 7679 7680 7681 7682 7683 7684 7685 7686 7687 7688 7689 7690 7691 7692 7693 7694 7695 7696 7697 7698 7699 7700 7701 7702 7703 7704 7705 7706 7707 7708 7709 7710 7711 7712 7713 7714 7715 7716 7717 7718 7719 7720 7721 7722 7723 7724 7725 7726 7727 7728 7729 7730 7731 7732 7733 7734 7735 7736 7737 7738 7739 7740 7741 7742 7743 7744 7745 7746 7747 7748 7749 7750 7751 7752 7753 7754 7755 7756 7757 7758 7759 7760 7761 7762 7763 7764 7765 7766 7767 7768 7769 7770 7771 7772 7773 7774 7775 7776 7777 7778 7779 7780 7781 7782 7783 7784 7785 7786 7787 7788 7789 7790 7791 7792 7793 7794 7795 7796 7797 7798 7799 7800 7801 7802 7803 7804 7805 7806 7807 7808 7809 7810 7811 7812 7813 7814 7815 7816 7817 7818 7819 7820 7821 7822 7823 7824 7825 7826 7827 7828 7829 7830 7831 7832 7833 7834 7835 7836 7837 7838 7839 7840 7841 7842 7843 7844 7845 7846 7847 7848 7849 7850 7851 7852 7853 7854 7855 7856 7857 7858 7859 7860 7861 7862 7863 7864 7865 7866 7867 7868 7869 7870 7871 7872 7873 7874 7875 7876 7877 7878 7879 7880 7881 7882 7883 7884 7885 7886 7887 7888 7889 7890 7891 7892 7893 7894 7895 7896 7897 7898 7899 7900 7901 7902 7903 7904 7905 7906 7907 7908 7909 7910 7911 7912 7913 7914 7915 7916 7917 7918 7919 7920 7921 7922 7923 7924 7925 7926 7927 7928 7929 7930 7931 7932 7933 7934 7935 7936 7937 7938 7939 7940 7941 7942 7943 7944 7945 7946 7947 7948 7949 7950 7951 7952 7953 7954 7955 7956 7957 7958 7959 7960 7961 7962 7963 7964 7965 7966 7967 7968 7969 7970 7971 7972 7973 7974 7975 7976 7977 7978 7979 7980 7981 7982 7983 7984 7985 7986 7987 7988 7989 7990 7991 7992 7993 7994 7995 7996 7997 7998 7999 8000 8001 8002 8003 8004 8005 8006 8007 8008 8009 8010 8011 8012 8013 8014 8015 8016 8017 8018 8019 8020 8021 8022 8023 8024 8025 8026 8027 8028 8029 8030 8031 8032 8033 8034 8035 8036 8037 8038 8039 8040 8041 8042 8043 8044 8045 8046 8047 8048 8049 8050 8051 8052 8053 8054 8055 8056 8057 8058 8059 8060 8061 8062 8063 8064 8065 8066 8067 8068 8069 8070 8071 8072 8073 8074 8075 8076 8077 8078 8079 8080 8081 8082 8083 8084 8085 8086 8087 8088 8089 8090 8091 8092 8093 8094 8095 8096 8097 8098 8099 8100 8101 8102 8103 8104 8105 8106 8107 8108 8109 8110 8111 8112 8113 8114 8115 8116 8117 8118 8119 8120 8121 8122 8123 8124 8125 8126 8127 8128 8129 8130 8131 8132 8133 8134 8135 8136 8137 8138 8139 8140 8141 8142 8143 8144 8145 8146 8147 8148 8149 8150 8151 8152 8153 8154 8155 8156 8157 8158 8159 8160 8161 8162 8163 8164 8165 8166 8167 8168 8169 8170 8171 8172 8173 8174 8175 8176 8177 8178 8179 8180 8181 8182 8183 8184 8185 8186 8187 8188 8189 8190 8191 8192 8193 8194 8195 8196 8197 8198 8199 8200 8201 8202 8203 8204 8205 8206 8207 8208 8209 8210 8211 8212 8213 8214 8215 8216 8217 8218 8219 8220 8221 8222 8223 8224 8225 8226 8227 8228 8229 8230 8231 8232 8233 8234 8235 8236 8237 8238 8239 8240 8241 8242 8243 8244 8245 8246 8247 8248 8249 8250 8251 8252 8253 8254 8255 8256 8257 8258 8259 8260 8261 8262 8263 8264 8265 8266 8267 8268 8269 8270 8271 8272 8273 8274 8275 8276 8277 8278 8279 8280 8281 8282 8283 8284 8285 8286 8287 8288 8289 8290 8291 8292 8293 8294 8295 8296 8297 8298 8299 8300 8301 8302 8303 8304 8305 8306 8307 8308 8309 8310 8311 8312 8313 8314 8315 8316 8317 8318 8319 8320 8321 8322 8323 8324 8325 8326 8327 8328 8329 8330 8331 8332 8333 8334 8335 8336 8337 8338 8339 8340 8341 8342 8343 8344 8345 8346 8347 8348 8349 8350 8351 8352 8353 8354 8355 8356 8357 8358 8359 8360 8361 8362 8363 8364 8365 8366 8367 8368 8369 8370 8371 8372 8373 8374 8375 8376 8377 8378 8379 8380 8381 8382 8383 8384 8385 8386 8387 8388 8389 8390 8391 8392 8393 8394 8395 8396 8397 8398 8399 8400 8401 8402 8403 8404 8405 8406 8407 8408 8409 8410 8411 8412 8413 8414 8415 8416 8417 8418 8419 8420 8421 8422 8423 8424 8425 8426 8427 8428 8429 8430 8431 8432 8433 8434 8435 8436 8437 8438 8439 8440 8441 8442 8443 8444 8445 8446 8447 8448 8449 8450 8451 8452 8453 8454 8455 8456 8457 8458 8459 8460 8461 8462 8463 8464 8465 8466 8467 8468 8469 8470 8471 8472 8473 8474 8475 8476 8477 8478 8479 8480 8481 8482 8483 8484 8485 8486 8487 8488 8489 8490 8491 8492 8493 8494 8495 8496 8497 8498 8499 8500 8501 8502 8503 8504 8505 8506 8507 8508 8509 8510 8511 8512 8513 8514 8515 8516 8517 8518 8519 8520 8521 8522 8523 8524 8525 8526 8527 8528 8529 8530 8531 8532 8533 8534 8535 8536 8537 8538 8539 8540 8541 8542 8543 8544 8545 8546 8547 8548 8549 8550 8551 8552 8553 8554 8555 8556 8557 8558 8559 8560 8561 8562 8563 8564 8565 8566 8567 8568 8569 8570 8571 8572 8573 8574 8575 8576 8577 8578 8579 8580 8581 8582 8583 8584 8585 8586 8587 8588 8589 8590 8591 8592 8593 8594 8595 8596 8597 8598 8599 8600 8601 8602 8603 8604 8605 8606 8607 8608 8609 8610 8611 8612 8613 8614 8615 8616 8617 8618 8619 8620 8621 8622 8623 8624 8625 8626 8627 8628 8629 8630 8631 8632 8633 8634 8635 8636 8637 8638 8639 8640 8641 8642 8643 8644 8645 8646 8647 8648 8649 8650 8651 8652 8653 8654 8655 8656 8657 8658 8659 8660 8661 8662 8663 8664 8665 8666 8667 8668 8669 8670 8671 8672 8673 8674 8675 8676 8677 8678 8679 8680 8681 8682 8683 8684 8685 8686 8687 8688 8689 8690 8691 8692 8693 8694 8695 8696 8697 8698 8699 8700 8701 8702 8703 8704 8705 8706 8707 8708 8709 8710 8711 8712 8713 8714 8715 8716 8717 8718 8719 8720 8721 8722 8723 8724 8725 8726 8727 8728 8729 8730 8731 8732 8733 8734 8735 8736 8737 8738 8739 8740 8741 8742 8743 8744 8745 8746 8747 8748 8749 8750 8751 8752 8753 8754 8755 8756 8757 8758 8759 8760 8761 8762 8763 8764 8765 8766 8767 8768 8769 8770 8771 8772 8773 8774 8775 8776 8777 8778 8779 8780 8781 8782 8783 8784 8785 8786 8787 8788 8789 8790 8791 8792 8793 8794 8795 8796 8797 8798 8799 8800 8801 8802 8803 8804 8805 8806 8807 8808 8809 8810 8811 8812 8813 8814 8815 8816 8817 8818 8819 8820 8821 8822 8823 8824 8825 8826 8827 8828 8829 8830 8831 8832 8833 8834 8835 8836 8837 8838 8839 8840 8841 8842 8843 8844 8845 8846 8847 8848 8849 8850 8851 8852 8853 8854 8855 8856 8857 8858 8859 8860 8861 8862 8863 8864 8865 8866 8867 8868 8869 8870 8871 8872 8873 8874 8875 8876 8877 8878 8879 8880 8881 8882 8883 8884 8885 8886 8887 8888 8889 8890 8891 8892 8893 8894 8895 8896 8897 8898 8899 8900 8901 8902 8903 8904 8905 8906 8907 8908 8909 8910 8911 8912 8913 8914 8915 8916 8917 8918 8919 8920 8921 8922 8923 8924 8925 8926 8927 8928 8929 8930 8931 8932 8933 8934 8935 8936 8937 8938 8939 8940 8941 8942 8943 8944 8945 8946 8947 8948 8949 8950 8951 8952 8953 8954 8955 8956 8957 8958 8959 8960 8961 8962 8963 8964 8965 8966 8967 8968 8969 8970 8971 8972 8973 8974 8975 8976 8977 8978 8979 8980 8981 8982 8983 8984 8985 8986 8987 8988 8989 8990 8991 8992 8993 8994 8995 8996 8997 8998 8999 9000 9001 9002 9003 9004 9005 9006 9007 9008 9009 9010 9011 9012 9013 9014 9015 9016 9017 9018 9019 9020 9021 9022 9023 9024 9025 9026 9027 9028 9029 9030 9031 9032 9033 9034 9035 9036 9037 9038 9039 9040 9041 9042 9043 9044 9045 9046 9047 9048 9049 9050 9051 9052 9053 9054 9055 9056 9057 9058 9059 9060 9061 9062 9063 9064 9065 9066 9067 9068 9069 9070 9071 9072 9073 9074 9075 9076 9077 9078 9079 9080 9081 9082 9083 9084 9085 9086 9087 9088 9089 9090 9091 9092 9093 9094 9095 9096 9097 9098 9099 9100 9101 9102 9103 9104 9105 9106 9107 9108 9109 9110 9111 9112 9113 9114 9115 9116 9117 9118 9119 9120 9121 9122 9123 9124 9125 9126 9127 9128 9129 9130 9131 9132 9133 9134 9135 9136 9137 9138 9139 9140 9141 9142 9143 9144 9145 9146 9147 9148 9149 9150 9151 9152 9153 9154 9155 9156 9157 9158 9159 9160 9161 9162 9163 9164 9165 9166 9167 9168 9169 9170 9171 9172 9173 9174 9175 9176 9177 9178 9179 9180 9181 9182 9183 9184 9185 9186 9187 9188 9189 9190 9191 9192 9193 9194 9195 9196 9197 9198 9199 9200 9201 9202 9203 9204 9205 9206 9207 9208 9209 9210 9211 9212 9213 9214 9215 9216 9217 9218 9219 9220 9221 9222 9223 9224 9225 9226 9227 9228 9229 9230 9231 9232 9233 9234 9235 9236 9237 9238 9239 9240 9241 9242 9243 9244 9245 9246 9247 9248 9249 9250 9251 9252 9253 9254 9255 9256 9257 9258 9259 9260 9261 9262 9263 9264 9265 9266 9267 9268 9269 9270 9271 9272 9273 9274 9275 9276 9277 9278 9279 9280 9281 9282 9283 9284 9285 9286 9287 9288 9289 9290 9291 9292 9293 9294 9295 9296 9297 9298 9299 9300 9301 9302 9303 9304 9305 9306 9307 9308 9309 9310 9311 9312 9313 9314 9315 9316 9317 9318 9319 9320 9321 9322 9323 9324 9325 9326 9327 9328 9329 9330 9331 9332 9333 9334 9335 9336 9337 9338 9339 9340 9341 9342 9343 9344 9345 9346 9347 9348 9349 9350 9351 9352 9353 9354 9355 9356 9357 9358 9359 9360 9361 9362 9363 9364 9365 9366 9367 9368 9369 9370 9371 9372 9373 9374 9375 9376 9377 9378 9379 9380 9381 9382 9383 9384 9385 9386 9387 9388 9389 9390 9391 9392 9393 9394 9395 9396 9397 9398 9399 9400 9401 9402 9403 9404 9405 9406 9407 9408 9409 9410 9411 9412 9413 9414 9415 9416 9417 9418 9419 9420 9421 9422 9423 9424 9425 9426 9427 9428 9429 9430 9431 9432 9433 9434 9435 9436 9437 9438 9439 9440 9441 9442 9443 9444 9445 9446 9447 9448 9449 9450 9451 9452 9453 9454 9455 9456 9457 9458 9459 9460 9461 9462 9463 9464 9465 9466 9467 9468 9469 9470 9471 9472 9473 9474 9475 9476 9477 9478 9479 9480 9481 9482 9483 9484 9485 9486 9487 9488 9489 9490 9491 9492 9493 9494 9495 9496 9497 9498 9499 9500 9501 9502 9503 9504 9505 9506 9507 9508 9509 9510 9511 9512 9513 9514 9515 9516 9517 9518 9519 9520 9521 9522 9523 9524 9525 9526 9527 9528 9529 9530 9531 9532 9533 9534 9535 9536 9537 9538 9539 9540 9541 9542 9543 9544 9545 9546 9547 9548 9549 9550 9551 9552 9553 9554 9555 9556 9557 9558 9559 9560 9561 9562 9563 9564 9565 9566 9567 9568 9569 9570 9571 9572 9573 9574 9575 9576 9577 9578 9579 9580 9581 9582 9583 9584 9585 9586 9587 9588 9589 9590 9591 9592 9593 9594 9595 9596 9597 9598 9599 9600 9601 9602 9603 9604 9605 9606 9607 9608 9609 9610 9611 9612 9613 9614 9615 9616 9617 9618 9619 9620 9621 9622 9623 9624 9625 9626 9627 9628 9629 9630 9631 9632 9633 9634 9635 9636 9637 9638 9639 9640 9641 9642 9643 9644 9645 9646 9647 9648 9649 9650 9651 9652 9653 9654 9655 9656 9657 9658 9659 9660 9661 9662 9663 9664 9665 9666 9667 9668 9669 9670 9671 9672 9673 9674 9675 9676 9677 9678 9679 9680 9681 9682 9683 9684 9685 9686 9687 9688 9689 9690 9691 9692 9693 9694 9695 9696 9697 9698 9699 9700 9701 9702 9703 9704 9705 9706 9707 9708 9709 9710 9711 9712 9713 9714 9715 9716 9717 9718 9719 9720 9721 9722 9723 9724 9725 9726 9727 9728 9729 9730 9731 9732 9733 9734 9735 9736 9737 9738 9739 9740 9741 9742 9743 9744 9745 9746 9747 9748 9749 9750 9751 9752 9753 9754 9755 9756 9757 9758 9759 9760 9761 9762 9763 9764 9765 9766 9767 9768 9769 9770 9771 9772 9773 9774 9775 9776 9777 9778 9779 9780 9781 9782 9783 9784 9785 9786 9787 9788 9789 9790 9791 9792 9793 9794 9795 9796 9797 9798 9799 9800 9801 9802 9803 9804 9805 9806 9807 9808 9809 9810 9811 9812 9813 9814 9815 9816 9817 9818 9819 9820 9821 9822 9823 9824 9825 9826 9827 9828 9829 9830 9831 9832 9833 9834 9835 9836 9837 9838 9839 9840 9841 9842 9843 9844 9845 9846 9847 9848 9849 9850 9851 9852 9853 9854 9855 9856 9857 9858 9859 9860 9861 9862 9863 9864 9865 9866 9867 9868 9869 9870 9871 9872 9873 9874 9875 9876 9877 9878 9879 9880 9881 9882 9883 9884 9885 9886 9887 9888 9889 9890 9891 9892 9893 9894 9895 9896 9897 9898 9899 9900 9901 9902 9903 9904 9905 9906 9907 9908 9909 9910 9911 9912 9913 9914 9915 9916 9917 9918 9919 9920 9921 9922 9923 9924 9925 9926 9927 9928 9929 9930 9931 9932 9933 9934 9935 9936 9937 9938 9939 9940 9941 9942 9943 9944 9945 9946 9947 9948 9949 9950 9951 9952 9953 9954 9955 9956 9957 9958 9959 9960 9961 9962 9963 9964 9965 9966 9967 9968 9969 9970 9971 9972 9973 9974 9975 9976 9977 9978 9979 9980 9981 9982 9983 9984 9985 9986 9987 9988 9989 9990 9991 9992 9993 9994 9995 9996 9997 9998 9999 10000 10001 10002 10003 10004 10005 10006 10007 10008 10009 10010 10011 10012 10013 10014 10015 10016 10017 10018 10019 10020 10021 10022 10023 10024 10025 10026 10027 10028 10029 10030 10031 10032 10033 10034 10035 10036 10037 10038 10039 10040 10041 10042 10043 10044 10045 10046 10047 10048 10049 10050 10051 10052 10053 10054 10055 10056 10057 10058 10059 10060 10061 10062 10063 10064 10065 10066 10067 10068 10069 10070 10071 10072 10073 10074 10075 10076 10077 10078 10079 10080 10081 10082 10083 10084 10085 10086 10087 10088 10089 10090 10091 10092 10093 10094 10095 10096 10097 10098 10099 10100 10101 10102 10103 10104 10105 10106 10107 10108 10109 10110 10111 10112 10113 10114 10115 10116 10117 10118 10119 10120 10121 10122 10123 10124 10125 10126 10127 10128 10129 10130 10131 10132 10133 10134 10135 10136 10137 10138 10139 10140 10141 10142 10143 10144 10145 10146 10147 10148 10149 10150 10151 10152 10153 10154 10155 10156 10157 10158 10159 10160 10161 10162 10163 10164 10165 10166 10167 10168 10169 10170 10171 10172 10173 10174 10175 10176 10177 10178 10179 10180 10181 10182 10183 10184 10185 10186 10187 10188 10189 10190 10191 10192 10193 10194 10195 10196 10197 10198 10199 10200 10201 10202 10203 10204 10205 10206 10207 10208 10209 10210 10211 10212 10213 10214 10215 10216 10217 10218 10219 10220 10221 10222 10223 10224 10225 10226 10227 10228 10229 10230 10231 10232 10233 10234 10235 10236 10237 10238 10239 10240 10241 10242 10243 10244 10245 10246 10247 10248 10249 10250 10251 10252 10253 10254 10255 10256 10257 10258 10259 10260 10261 10262 10263 10264 10265 10266 10267 10268 10269 10270 10271 10272 10273 10274 10275 10276 10277 10278 10279 10280 10281 10282 10283 10284 10285 10286 10287 10288 10289 10290 10291 10292 10293 10294 10295 10296 10297 10298 10299 10300 10301 10302 10303 10304 10305 10306 10307 10308 10309 10310 10311 10312 10313 10314 10315 10316 10317 10318 10319 10320 10321 10322 10323 10324 10325 10326 10327 10328 10329 10330 10331 10332 10333 10334 10335 10336 10337 10338 10339 10340 10341 10342 10343 10344 10345 10346 10347 10348 10349 10350 10351 10352 10353 10354 10355 10356 10357 10358 10359 10360 10361 10362 10363 10364 10365 10366 10367 10368 10369 10370 10371 10372 10373 10374 10375 10376 10377 10378 10379 10380 10381 10382 10383 10384 10385 10386 10387 10388 10389 10390 10391 10392 10393 10394 10395 10396 10397 10398 10399 10400 10401 10402 10403 10404 10405 10406 10407 10408 10409 10410 10411 10412 10413 10414 10415 10416 10417 10418 10419 10420 10421 10422 10423 10424 10425 10426 10427 10428 10429 10430 10431 10432 10433 10434 10435 10436 10437 10438 10439 10440 10441 10442 10443 10444 10445 10446 10447 10448 10449 10450 10451 10452 10453 10454 10455 10456 10457 10458 10459 10460 10461 10462 10463 10464 10465 10466 10467 10468 10469 10470 10471 10472 10473 10474 10475 10476 10477 10478 10479 10480 10481 10482 10483 10484 10485 10486 10487 10488 10489 10490 10491 10492 10493 10494 10495 10496 10497 10498 10499 10500 10501 10502 10503 10504 10505 10506 10507 10508 10509 10510 10511 10512 10513 10514 10515 10516 10517 10518 10519 10520 10521 10522 10523 10524 10525 10526 10527 10528 10529 10530 10531 10532 10533 10534 10535 10536 10537 10538 10539 10540 10541 10542 10543 10544 10545 10546 10547 10548 10549 10550 10551 10552 10553 10554 10555 10556 10557 10558 10559 10560 10561 10562 10563 10564 10565 10566 10567 10568 10569 10570 10571 10572 10573 10574 10575 10576 10577 10578 10579 10580 10581 10582 10583 10584 10585 10586 10587 10588 10589 10590 10591 10592 10593 10594 10595 10596 10597 10598 10599 10600 10601 10602 10603 10604 10605 10606 10607 10608 10609 10610 10611 10612 10613 10614 10615 10616 10617 10618 10619 10620 10621 10622 10623 10624 10625 10626 10627 10628 10629 10630 10631 10632 10633 10634 10635 10636 10637 10638 10639 10640 10641 10642 10643 10644 10645 10646 10647 10648 10649 10650 10651 10652 10653 10654 10655 10656 10657 10658 10659 10660 10661 10662 10663 10664 10665 10666 10667 10668 10669 10670 10671 10672 10673 10674 10675 10676 10677 10678 10679 10680 10681 10682 10683 10684 10685 10686 10687 10688 10689 10690 10691 10692 10693 10694 10695 10696 10697 10698 10699 10700 10701 10702 10703 10704 10705 10706 10707 10708 10709 10710 10711 10712 10713 10714 10715 10716 10717 10718 10719 10720 10721 10722 10723 10724 10725 10726 10727 10728 10729 10730 10731 10732 10733 10734 10735 10736 10737 10738 10739 10740 10741 10742 10743 10744 10745 10746 10747 10748 10749 10750 10751 10752 10753 10754 10755 10756 10757 10758 10759 10760 10761 10762 10763 10764 10765 10766 10767 10768 10769 10770 10771 10772 10773 10774 10775 10776 10777 10778 10779 10780 10781 10782 10783 10784 10785 10786 10787 10788 10789 10790 10791 10792 10793 10794 10795 10796 10797 10798 10799 10800 10801 10802 10803 10804 10805 10806 10807 10808 10809 10810 10811 10812 10813 10814 10815 10816 10817 10818 10819 10820 10821 10822 10823 10824 10825 10826 10827 10828 10829 10830 10831 10832 10833 10834 10835 10836 10837 10838 10839 10840 10841 10842 10843 10844 10845 10846 10847 10848 10849 10850 10851 10852 10853 10854 10855 10856 10857 10858 10859 10860 10861 10862 10863 10864 10865 10866 10867 10868 10869 10870 10871 10872 10873 10874 10875 10876 10877 10878 10879 10880 10881 10882 10883 10884 10885 10886 10887 10888 10889 10890 10891 10892 10893 10894 10895 10896 10897 10898 10899 10900 10901 10902 10903 10904 10905 10906 10907 10908 10909 10910 10911 10912 10913 10914 10915 10916 10917 10918 10919 10920 10921 10922 10923 10924 10925 10926 10927 10928 10929 10930 10931 10932 10933 10934 10935 10936 10937 10938 10939 10940 10941 10942 10943 10944 10945 10946 10947 10948 10949 10950 10951 10952 10953 10954 10955 10956 10957 10958 10959 10960 10961 10962 10963 10964 10965 10966 10967 10968 10969 10970 10971 10972 10973 10974 10975 10976 10977 10978 10979 10980 10981 10982 10983 10984 10985 10986 10987 10988 10989 10990 10991 10992 10993 10994 10995 10996 10997 10998 10999 11000 11001 11002 11003 11004 11005 11006 11007 11008 11009 11010 11011 11012 11013 11014 11015 11016 11017 11018 11019 11020 11021 11022 11023 11024 11025 11026 11027 11028 11029 11030 11031 11032 11033 11034 11035 11036 11037 11038 11039 11040 11041 11042 11043 11044 11045 11046 11047 11048 11049 11050 11051 11052 11053 11054 11055 11056 11057 11058 11059 11060 11061 11062 11063 11064 11065 11066 11067 11068 11069 11070 11071 11072 11073 11074 11075 11076 11077 11078 11079 11080 11081 11082 11083 11084 11085 11086 11087 11088 11089 11090 11091 11092 11093 11094 11095 11096 11097 11098 11099 11100 11101 11102 11103 11104 11105 11106 11107 11108 11109 11110 11111 11112 11113 11114 11115 11116 11117 11118 11119 11120 11121 11122 11123 11124 11125 11126 11127 11128 11129 11130 11131 11132 11133 11134 11135 11136 11137 11138 11139 11140 11141 11142 11143 11144 11145 11146 11147 11148 11149 11150 11151 11152 11153 11154 11155 11156 11157 11158 11159 11160 11161 11162 11163 11164 11165 11166 11167 11168 11169 11170 11171 11172 11173 11174 11175 11176 11177 11178 11179 11180 11181 11182 11183 11184 11185 11186 11187 11188 11189 11190 11191 11192 11193 11194 11195 11196 11197 11198 11199 11200 11201 11202 11203 11204 11205 11206 11207 11208 11209 11210 11211 11212 11213 11214 11215 11216 11217 11218 11219 11220 11221 11222 11223 11224 11225 11226 11227 11228 11229 11230 11231 11232 11233 11234 11235 11236 11237 11238 11239 11240 11241 11242 11243 11244 11245 11246 11247 11248 11249 11250 11251 11252 11253 11254 11255 11256 11257 11258 11259 11260 11261 11262 11263 11264 11265 11266 11267 11268 11269 11270 11271 11272 11273 11274 11275 11276 11277 11278 11279 11280 11281 11282 11283 11284 11285 11286 11287 11288 11289 11290 11291 11292 11293 11294 11295 11296 11297 11298 11299 11300 11301 11302 11303 11304 11305 11306 11307 11308 11309 11310 11311 11312 11313 11314 11315 11316 11317 11318 11319 11320 11321 11322 11323 11324 11325 11326 11327 11328 11329 11330 11331 11332 11333 11334 11335 11336 11337 11338 11339 11340 11341 11342 11343 11344 11345 11346 11347 11348 11349 11350 11351 11352 11353 11354 11355 11356 11357 11358 11359 11360 11361 11362 11363 11364 11365 11366 11367 11368 11369 11370 11371 11372 11373 11374 11375 11376 11377 11378 11379 11380 11381 11382 11383 11384 11385 11386 11387 11388 11389 11390 11391 11392 11393 11394 11395 11396 11397 11398 11399 11400 11401 11402 11403 11404 11405 11406 11407 11408 11409 11410 11411 11412 11413 11414 11415 11416 11417 11418 11419 11420 11421 11422 11423 11424 11425 11426 11427 11428 11429 11430 11431 11432 11433 11434 11435 11436 11437 11438 11439 11440 11441 11442 11443 11444 11445 11446 11447 11448 11449 11450 11451 11452 11453 11454 11455 11456 11457 11458 11459 11460 11461 11462 11463 11464 11465 11466 11467 11468 11469 11470 11471 11472 11473 11474 11475 11476 11477 11478 11479 11480 11481 11482 11483 11484 11485 11486 11487 11488 11489 11490 11491 11492 11493 11494 11495 11496 11497 11498 11499 11500 11501 11502 11503 11504 11505 11506 11507 11508 11509 11510 11511 11512 11513 11514 11515 11516 11517 11518 11519 11520 11521 11522 11523 11524 11525 11526 11527 11528 11529 11530 11531 11532 11533 11534 11535 11536 11537 11538 11539 11540 11541 11542 11543 11544 11545 11546 11547 11548 11549 11550 11551 11552 11553 11554 11555 11556 11557 11558 11559 11560 11561 11562 11563 11564 11565 11566 11567 11568 11569 11570 11571 11572 11573 11574 11575 11576 11577 11578 11579 11580 11581 11582 11583 11584 11585 11586 11587 11588 11589 11590 11591 11592 11593 11594 11595 11596 11597 11598 11599 11600 11601 11602 11603 11604 11605 11606 11607 11608 11609 11610 11611 11612 11613 11614 11615 11616 11617 11618 11619 11620 11621 11622 11623 11624 11625 11626 11627 11628 11629 11630 11631 11632 11633 11634 11635 11636 11637 11638 11639 11640 11641 11642 11643 11644 11645 11646 11647 11648 11649 11650 11651 11652 11653 11654 11655 11656 11657 11658 11659 11660 11661 11662 11663 11664 11665 11666 11667 11668 11669 11670 11671 11672 11673 11674 11675 11676 11677 11678 11679 11680 11681 11682 11683 11684 11685 11686 11687 11688 11689 11690 11691 11692 11693 11694 11695 11696 11697 11698 11699 11700 11701 11702 11703 11704 11705 11706 11707 11708 11709 11710 11711 11712 11713 11714 11715 11716 11717 11718 11719 11720 11721 11722 11723 11724 11725 11726 11727 11728 11729 11730 11731 11732 11733 11734 11735 11736 11737 11738 11739 11740 11741 11742 11743 11744 11745 11746 11747 11748 11749 11750 11751 11752 11753 11754 11755 11756 11757 11758 11759 11760 11761 11762 11763 11764 11765 11766 11767 11768 11769 11770 11771 11772 11773 11774 11775 11776 11777 11778 11779 11780 11781 11782 11783 11784 11785 11786 11787 11788 11789 11790 11791 11792 11793 11794 11795 11796 11797 11798 11799 11800 11801 11802 11803 11804 11805 11806 11807 11808 11809 11810 11811 11812 11813 11814 11815 11816 11817 11818 11819 11820 11821 11822 11823 11824 11825 11826 11827 11828 11829 11830 11831 11832 11833 11834 11835 11836 11837 11838 11839 11840 11841 11842 11843 11844 11845 11846 11847 11848 11849 11850 11851 11852 11853 11854 11855 11856 11857 11858 11859 11860 11861 11862 11863 11864 11865 11866 11867 11868 11869 11870 11871 11872 11873 11874 11875 11876 11877 11878 11879 11880 11881 11882 11883 11884 11885 11886 11887 11888 11889 11890 11891 11892 11893 11894 11895 11896 11897 11898 11899 11900 11901 11902 11903 11904 11905 11906 11907 11908 11909 11910 11911 11912 11913 11914 11915 11916 11917 11918 11919 11920 11921 11922 11923 11924 11925 11926 11927 11928 11929 11930 11931 11932 11933 11934 11935 11936 11937 11938 11939 11940 11941 11942 11943 11944 11945 11946 11947 11948 11949 11950 11951 11952 11953 11954 11955 11956 11957 11958 11959 11960 11961 11962 11963 11964 11965 11966 11967 11968 11969 11970 11971 11972 11973 11974 11975 11976 11977 11978 11979 11980 11981 11982 11983 11984 11985 11986 11987 11988 11989 11990 11991 11992 11993 11994 11995 11996 11997 11998 11999 12000 12001 12002 12003 12004 12005 12006 12007 12008 12009 12010 12011 12012 12013 12014 12015 12016 12017 12018 12019 12020 12021 12022 12023 12024 12025 12026 12027 12028 12029 12030 12031 12032 12033 12034 12035 12036 12037 12038 12039 12040 12041 12042 12043 12044 12045 12046
//! # Core functionality //! # Basic structures //! # C structures and operations //! # Connections with C++ //! # Operations on arrays //! # Asynchronous API //! # XML/YAML Persistence //! # Clustering //! # Utility and system functions and macros //! # Logging facilities //! # SSE utilities //! # NEON utilities //! # VSX utilities //! # Softfloat support //! # Utility functions for OpenCV samples //! # OpenGL interoperability //! # Intel IPP Asynchronous C/C++ Converters //! # Optimization Algorithms //! # DirectX interoperability //! # Eigen support //! # OpenCL support //! # Intel VA-API/OpenCL (CL-VA) interoperability //! # Hardware Acceleration Layer //! # Functions //! # Interface //! # Universal intrinsics //! # Private implementation helpers use std::os::raw::{c_char, c_void}; use libc::{ptrdiff_t, size_t}; use crate::{Error, Result, core, sys, types}; pub const ACCESS_FAST: i32 = 1<<26; pub const ACCESS_MASK: i32 = 3<<24; pub const ACCESS_READ: i32 = 1<<24; pub const ACCESS_RW: i32 = 3<<24; pub const ACCESS_WRITE: i32 = 1<<25; /// `iiiiii|abcdefgh|iiiiiii` with some specified `i` pub const BORDER_CONSTANT: i32 = 0; /// same as BORDER_REFLECT_101 pub const BORDER_DEFAULT: i32 = 4; /// do not look outside of ROI pub const BORDER_ISOLATED: i32 = 16; /// `fedcba|abcdefgh|hgfedcb` pub const BORDER_REFLECT: i32 = 2; /// same as BORDER_REFLECT_101 pub const BORDER_REFLECT101: i32 = 4; /// `gfedcb|abcdefgh|gfedcba` pub const BORDER_REFLECT_101: i32 = 4; /// `aaaaaa|abcdefgh|hhhhhhh` pub const BORDER_REPLICATE: i32 = 1; /// `uvwxyz|abcdefgh|ijklmno` pub const BORDER_TRANSPARENT: i32 = 5; /// `cdefgh|abcdefgh|abcdefg` pub const BORDER_WRAP: i32 = 3; /// incorrect input align pub const BadAlign: i32 = -21; pub const BadAlphaChannel: i32 = -18; /// input COI is not supported pub const BadCOI: i32 = -24; pub const BadCallBack: i32 = -22; pub const BadDataPtr: i32 = -12; /// input image depth is not supported by the function pub const BadDepth: i32 = -17; /// image size is invalid pub const BadImageSize: i32 = -10; pub const BadModelOrChSeq: i32 = -14; pub const BadNumChannel1U: i32 = -16; /// bad number of channels, for example, some functions accept only single channel matrices. pub const BadNumChannels: i32 = -15; /// offset is invalid pub const BadOffset: i32 = -11; /// number of dimensions is out of range pub const BadOrder: i32 = -19; /// incorrect input origin pub const BadOrigin: i32 = -20; /// incorrect input roi pub const BadROISize: i32 = -25; /// image step is wrong, this may happen for a non-continuous matrix. pub const BadStep: i32 = -13; pub const BadTileSize: i32 = -23; /// src1 is equal to src2. pub const CMP_EQ: i32 = 0; /// src1 is greater than or equal to src2. pub const CMP_GE: i32 = 2; /// src1 is greater than src2. pub const CMP_GT: i32 = 1; /// src1 is less than or equal to src2. pub const CMP_LE: i32 = 4; /// src1 is less than src2. pub const CMP_LT: i32 = 3; /// src1 is unequal to src2. pub const CMP_NE: i32 = 5; pub const COVAR_COLS: i32 = 16; pub const COVAR_NORMAL: i32 = 1; pub const COVAR_ROWS: i32 = 8; pub const COVAR_SCALE: i32 = 4; pub const COVAR_SCRAMBLED: i32 = 0; pub const COVAR_USE_AVG: i32 = 2; pub const CPU_AVX: i32 = 10; pub const CPU_AVX2: i32 = 11; /// Cascade Lake with AVX-512F/CD/BW/DQ/VL/VNNI pub const CPU_AVX512_CLX: i32 = 261; /// Cannon Lake with AVX-512F/CD/BW/DQ/VL/IFMA/VBMI pub const CPU_AVX512_CNL: i32 = 260; /// Common instructions AVX-512F/CD for all CPUs that support AVX-512 pub const CPU_AVX512_COMMON: i32 = 257; /// Ice Lake with AVX-512F/CD/BW/DQ/VL/IFMA/VBMI/VNNI/VBMI2/BITALG/VPOPCNTDQ pub const CPU_AVX512_ICL: i32 = 262; /// Knights Landing with AVX-512F/CD/ER/PF pub const CPU_AVX512_KNL: i32 = 258; /// Knights Mill with AVX-512F/CD/ER/PF/4FMAPS/4VNNIW/VPOPCNTDQ pub const CPU_AVX512_KNM: i32 = 259; /// Skylake-X with AVX-512F/CD/BW/DQ/VL pub const CPU_AVX512_SKX: i32 = 256; pub const CPU_AVX_5124FMAPS: i32 = 27; pub const CPU_AVX_5124VNNIW: i32 = 26; pub const CPU_AVX_512BITALG: i32 = 24; pub const CPU_AVX_512BW: i32 = 14; pub const CPU_AVX_512CD: i32 = 15; pub const CPU_AVX_512DQ: i32 = 16; pub const CPU_AVX_512ER: i32 = 17; pub const CPU_AVX_512F: i32 = 13; pub const CPU_AVX_512IFMA: i32 = 18; pub const CPU_AVX_512IFMA512: i32 = 18; pub const CPU_AVX_512PF: i32 = 19; pub const CPU_AVX_512VBMI: i32 = 20; pub const CPU_AVX_512VBMI2: i32 = 22; pub const CPU_AVX_512VL: i32 = 21; pub const CPU_AVX_512VNNI: i32 = 23; pub const CPU_AVX_512VPOPCNTDQ: i32 = 25; pub const CPU_FMA3: i32 = 12; pub const CPU_FP16: i32 = 9; pub const CPU_MAX_FEATURE: i32 = 512; pub const CPU_MMX: i32 = 1; pub const CPU_MSA: i32 = 150; pub const CPU_NEON: i32 = 100; pub const CPU_POPCNT: i32 = 8; pub const CPU_SSE: i32 = 2; pub const CPU_SSE2: i32 = 3; pub const CPU_SSE3: i32 = 4; pub const CPU_SSE4_1: i32 = 6; pub const CPU_SSE4_2: i32 = 7; pub const CPU_SSSE3: i32 = 5; pub const CPU_VSX: i32 = 200; pub const CPU_VSX3: i32 = 201; pub const CV_16S: i32 = 3; pub const CV_16U: i32 = 2; pub const CV_32F: i32 = 5; pub const CV_32S: i32 = 4; pub const CV_64F: i32 = 6; pub const CV_8S: i32 = 1; pub const CV_8U: i32 = 0; pub const CV_CN_MAX: i32 = 512; pub const CV_CN_SHIFT: i32 = 3; pub const CV_CPU_AVX: i32 = 10; pub const CV_CPU_AVX2: i32 = 11; pub const CV_CPU_AVX512_CLX: i32 = 261; pub const CV_CPU_AVX512_CNL: i32 = 260; pub const CV_CPU_AVX512_COMMON: i32 = 257; pub const CV_CPU_AVX512_ICL: i32 = 262; pub const CV_CPU_AVX512_KNL: i32 = 258; pub const CV_CPU_AVX512_KNM: i32 = 259; pub const CV_CPU_AVX512_SKX: i32 = 256; pub const CV_CPU_AVX_5124FMAPS: i32 = 27; pub const CV_CPU_AVX_5124VNNIW: i32 = 26; pub const CV_CPU_AVX_512BITALG: i32 = 24; pub const CV_CPU_AVX_512BW: i32 = 14; pub const CV_CPU_AVX_512CD: i32 = 15; pub const CV_CPU_AVX_512DQ: i32 = 16; pub const CV_CPU_AVX_512ER: i32 = 17; pub const CV_CPU_AVX_512F: i32 = 13; pub const CV_CPU_AVX_512IFMA: i32 = 18; /// deprecated pub const CV_CPU_AVX_512IFMA512: i32 = 18; pub const CV_CPU_AVX_512PF: i32 = 19; pub const CV_CPU_AVX_512VBMI: i32 = 20; pub const CV_CPU_AVX_512VBMI2: i32 = 22; pub const CV_CPU_AVX_512VL: i32 = 21; pub const CV_CPU_AVX_512VNNI: i32 = 23; pub const CV_CPU_AVX_512VPOPCNTDQ: i32 = 25; pub const CV_CPU_FMA3: i32 = 12; pub const CV_CPU_FP16: i32 = 9; pub const CV_CPU_MMX: i32 = 1; pub const CV_CPU_MSA: i32 = 150; pub const CV_CPU_NEON: i32 = 100; pub const CV_CPU_NONE: i32 = 0; pub const CV_CPU_POPCNT: i32 = 8; pub const CV_CPU_SSE: i32 = 2; pub const CV_CPU_SSE2: i32 = 3; pub const CV_CPU_SSE3: i32 = 4; pub const CV_CPU_SSE4_1: i32 = 6; pub const CV_CPU_SSE4_2: i32 = 7; pub const CV_CPU_SSSE3: i32 = 5; pub const CV_CPU_VSX: i32 = 200; pub const CV_CPU_VSX3: i32 = 201; pub const CV_HAL_BORDER_CONSTANT: i32 = 0; pub const CV_HAL_BORDER_ISOLATED: i32 = 16; pub const CV_HAL_BORDER_REFLECT: i32 = 2; pub const CV_HAL_BORDER_REFLECT_101: i32 = 4; pub const CV_HAL_BORDER_REPLICATE: i32 = 1; pub const CV_HAL_BORDER_TRANSPARENT: i32 = 5; pub const CV_HAL_BORDER_WRAP: i32 = 3; pub const CV_HAL_CMP_EQ: i32 = 0; pub const CV_HAL_CMP_GE: i32 = 2; pub const CV_HAL_CMP_GT: i32 = 1; pub const CV_HAL_CMP_LE: i32 = 4; pub const CV_HAL_CMP_LT: i32 = 3; pub const CV_HAL_CMP_NE: i32 = 5; pub const CV_HAL_DFT_COMPLEX_OUTPUT: i32 = 16; pub const CV_HAL_DFT_INVERSE: i32 = 1; pub const CV_HAL_DFT_IS_CONTINUOUS: i32 = 512; pub const CV_HAL_DFT_IS_INPLACE: i32 = 1024; pub const CV_HAL_DFT_REAL_OUTPUT: i32 = 32; pub const CV_HAL_DFT_ROWS: i32 = 4; pub const CV_HAL_DFT_SCALE: i32 = 2; pub const CV_HAL_DFT_STAGE_COLS: i32 = 128; pub const CV_HAL_DFT_TWO_STAGE: i32 = 64; pub const CV_HAL_ERROR_NOT_IMPLEMENTED: i32 = 1; pub const CV_HAL_ERROR_OK: i32 = 0; pub const CV_HAL_ERROR_UNKNOWN: i32 = -1; pub const CV_HAL_GEMM_1_T: i32 = 1; pub const CV_HAL_GEMM_2_T: i32 = 2; pub const CV_HAL_GEMM_3_T: i32 = 4; pub const CV_HAL_SVD_FULL_UV: i32 = 8; pub const CV_HAL_SVD_MODIFY_A: i32 = 4; pub const CV_HAL_SVD_NO_UV: i32 = 1; pub const CV_HAL_SVD_SHORT_UV: i32 = 2; pub const CV_HARDWARE_MAX_FEATURE: i32 = 512; /// !< Debug message. Disabled in the "Release" build. pub const CV_LOG_LEVEL_DEBUG: i32 = 5; /// !< Error message pub const CV_LOG_LEVEL_ERROR: i32 = 2; /// !< Fatal (critical) error (unrecoverable internal error) pub const CV_LOG_LEVEL_FATAL: i32 = 1; /// !< Info message pub const CV_LOG_LEVEL_INFO: i32 = 4; /// !< for using in setLogLevel() call pub const CV_LOG_LEVEL_SILENT: i32 = 0; /// !< Verbose (trace) messages. Requires verbosity level. Disabled in the "Release" build. pub const CV_LOG_LEVEL_VERBOSE: i32 = 6; /// !< Warning message pub const CV_LOG_LEVEL_WARN: i32 = 3; pub const CV_MAJOR_VERSION: i32 = 3; pub const CV_MAT_CONT_FLAG_SHIFT: i32 = 14; pub const CV_MINOR_VERSION: i32 = 4; pub const CV_SUBMAT_FLAG_SHIFT: i32 = 15; pub const CV_SUBMINOR_VERSION: i32 = 8; pub const CV_VERSION_MAJOR: i32 = 3; pub const CV_VERSION_MINOR: i32 = 4; pub const CV_VERSION_REVISION: i32 = 8; pub const CV_VERSION_STATUS: &'static str = ""; pub const DCT_INVERSE: i32 = 1; pub const DCT_ROWS: i32 = 4; pub const DECOMP_CHOLESKY: i32 = 3; pub const DECOMP_EIG: i32 = 2; pub const DECOMP_LU: i32 = 0; pub const DECOMP_NORMAL: i32 = 16; pub const DECOMP_QR: i32 = 4; pub const DECOMP_SVD: i32 = 1; pub const DFT_COMPLEX_INPUT: i32 = 64; pub const DFT_COMPLEX_OUTPUT: i32 = 16; pub const DFT_INVERSE: i32 = 1; pub const DFT_REAL_OUTPUT: i32 = 32; pub const DFT_ROWS: i32 = 4; pub const DFT_SCALE: i32 = 2; pub const Device_EXEC_KERNEL: i32 = (1 << 0); pub const Device_EXEC_NATIVE_KERNEL: i32 = (1 << 1); pub const Device_FP_CORRECTLY_ROUNDED_DIVIDE_SQRT: i32 = (1 << 7); pub const Device_FP_DENORM: i32 = (1 << 0); pub const Device_FP_FMA: i32 = (1 << 5); pub const Device_FP_INF_NAN: i32 = (1 << 1); pub const Device_FP_ROUND_TO_INF: i32 = (1 << 4); pub const Device_FP_ROUND_TO_NEAREST: i32 = (1 << 2); pub const Device_FP_ROUND_TO_ZERO: i32 = (1 << 3); pub const Device_FP_SOFT_FLOAT: i32 = (1 << 6); pub const Device_LOCAL_IS_GLOBAL: i32 = 2; pub const Device_LOCAL_IS_LOCAL: i32 = 1; pub const Device_NO_CACHE: i32 = 0; pub const Device_NO_LOCAL_MEM: i32 = 0; pub const Device_READ_ONLY_CACHE: i32 = 1; pub const Device_READ_WRITE_CACHE: i32 = 2; pub const Device_TYPE_ACCELERATOR: i32 = (1 << 3); pub const Device_TYPE_ALL: i32 = 0xFFFFFFFF; pub const Device_TYPE_CPU: i32 = (1 << 1); pub const Device_TYPE_DEFAULT: i32 = (1 << 0); pub const Device_TYPE_GPU: i32 = (1 << 2); pub const Device_UNKNOWN_VENDOR: i32 = 0; pub const Device_VENDOR_AMD: i32 = 1; pub const Device_VENDOR_INTEL: i32 = 2; pub const Device_VENDOR_NVIDIA: i32 = 3; pub const FILLED: i32 = -1; pub const FLAGS_EXPAND_SAME_NAMES: i32 = 0x02; pub const FLAGS_MAPPING: i32 = 0x01; pub const FLAGS_NONE: i32 = 0; /// normal size serif font pub const FONT_HERSHEY_COMPLEX: i32 = 3; /// smaller version of FONT_HERSHEY_COMPLEX pub const FONT_HERSHEY_COMPLEX_SMALL: i32 = 5; /// normal size sans-serif font (more complex than FONT_HERSHEY_SIMPLEX) pub const FONT_HERSHEY_DUPLEX: i32 = 2; /// small size sans-serif font pub const FONT_HERSHEY_PLAIN: i32 = 1; /// more complex variant of FONT_HERSHEY_SCRIPT_SIMPLEX pub const FONT_HERSHEY_SCRIPT_COMPLEX: i32 = 7; /// hand-writing style font pub const FONT_HERSHEY_SCRIPT_SIMPLEX: i32 = 6; /// normal size sans-serif font pub const FONT_HERSHEY_SIMPLEX: i32 = 0; /// normal size serif font (more complex than FONT_HERSHEY_COMPLEX) pub const FONT_HERSHEY_TRIPLEX: i32 = 4; /// flag for italic font pub const FONT_ITALIC: i32 = 16; /// empty structure (sequence or mapping) pub const FileNode_EMPTY: i32 = 32; /// synonym or REAL pub const FileNode_FLOAT: i32 = 2; /// compact representation of a sequence or mapping. Used only by YAML writer pub const FileNode_FLOW: i32 = 8; /// an integer pub const FileNode_INT: i32 = 1; /// mapping pub const FileNode_MAP: i32 = 6; /// the node has a name (i.e. it is element of a mapping) pub const FileNode_NAMED: i32 = 64; /// floating-point number pub const FileNode_REAL: i32 = 2; /// integer of size size_t. Typically used for storing complex dynamic structures where some elements reference the others pub const FileNode_REF: i32 = 4; /// sequence pub const FileNode_SEQ: i32 = 5; /// text string in UTF-8 encoding pub const FileNode_STR: i32 = 3; /// synonym for STR pub const FileNode_STRING: i32 = 3; /// a registered object (e.g. a matrix) pub const FileNode_USER: i32 = 16; /// value, open the file for appending pub const FileStorage_APPEND: i32 = 2; /// flag, write rawdata in Base64 by default. (consider using WRITE_BASE64) pub const FileStorage_BASE64: i32 = 64; /// flag, auto format pub const FileStorage_FORMAT_AUTO: i32 = 0; /// flag, JSON format pub const FileStorage_FORMAT_JSON: i32 = (3<<3); /// mask for format flags pub const FileStorage_FORMAT_MASK: i32 = (7<<3); /// flag, XML format pub const FileStorage_FORMAT_XML: i32 = (1<<3); /// flag, YAML format pub const FileStorage_FORMAT_YAML: i32 = (2<<3); pub const FileStorage_INSIDE_MAP: i32 = 4; /// flag, read data from source or write data to the internal buffer (which is pub const FileStorage_MEMORY: i32 = 4; pub const FileStorage_NAME_EXPECTED: i32 = 2; /// value, open the file for reading pub const FileStorage_READ: i32 = 0; pub const FileStorage_UNDEFINED: i32 = 0; pub const FileStorage_VALUE_EXPECTED: i32 = 1; /// value, open the file for writing pub const FileStorage_WRITE: i32 = 1; pub const Formatter_FMT_C: i32 = 5; pub const Formatter_FMT_CSV: i32 = 2; pub const Formatter_FMT_DEFAULT: i32 = 0; pub const Formatter_FMT_MATLAB: i32 = 1; pub const Formatter_FMT_NUMPY: i32 = 4; pub const Formatter_FMT_PYTHON: i32 = 3; /// transposes src1 pub const GEMM_1_T: i32 = 1; /// transposes src2 pub const GEMM_2_T: i32 = 2; /// transposes src3 pub const GEMM_3_T: i32 = 4; /// GPU API call error pub const GpuApiCallError: i32 = -217; /// no CUDA support pub const GpuNotSupported: i32 = -216; pub const Hamming_normType: i32 = 6; /// image header is NULL pub const HeaderIsNull: i32 = -9; pub const IMPL_IPP: i32 = 0+1; pub const IMPL_OPENCL: i32 = 0+2; pub const IMPL_PLAIN: i32 = 0; pub const KMEANS_PP_CENTERS: i32 = 2; pub const KMEANS_RANDOM_CENTERS: i32 = 0; pub const KMEANS_USE_INITIAL_LABELS: i32 = 1; pub const KernelArg_CONSTANT: i32 = 8; pub const KernelArg_LOCAL: i32 = 1; pub const KernelArg_NO_SIZE: i32 = 256; pub const KernelArg_PTR_ONLY: i32 = 16; pub const KernelArg_READ_ONLY: i32 = 2; pub const KernelArg_READ_WRITE: i32 = 6; pub const KernelArg_WRITE_ONLY: i32 = 4; /// 4-connected line pub const LINE_4: i32 = 4; /// 8-connected line pub const LINE_8: i32 = 8; /// antialiased line pub const LINE_AA: i32 = 16; /// Debug message. Disabled in the "Release" build. pub const LOG_LEVEL_DEBUG: i32 = 5; /// Error message pub const LOG_LEVEL_ERROR: i32 = 2; /// Fatal (critical) error (unrecoverable internal error) pub const LOG_LEVEL_FATAL: i32 = 1; /// Info message pub const LOG_LEVEL_INFO: i32 = 4; /// for using in setLogVevel() call pub const LOG_LEVEL_SILENT: i32 = 0; /// Verbose (trace) messages. Requires verbosity level. Disabled in the "Release" build. pub const LOG_LEVEL_VERBOSE: i32 = 6; /// Warning message pub const LOG_LEVEL_WARNING: i32 = 3; pub const MaskIsTiled: i32 = -26; pub const Mat_AUTO_STEP: usize = 0; pub const Mat_DEPTH_MASK: i32 = 7; pub const Mat_MAGIC_MASK: i32 = 0xFFFF0000; pub const Mat_MAGIC_VAL: i32 = 0x42FF0000; pub const Mat_TYPE_MASK: i32 = 0x00000FFF; pub const NORM_HAMMING: i32 = 6; pub const NORM_HAMMING2: i32 = 7; pub const NORM_INF: i32 = 1; pub const NORM_L1: i32 = 2; pub const NORM_L2: i32 = 4; pub const NORM_L2SQR: i32 = 5; /// flag pub const NORM_MINMAX: i32 = 32; /// flag pub const NORM_RELATIVE: i32 = 8; /// bit-mask which can be used to separate norm type from norm flags pub const NORM_TYPE_MASK: i32 = 7; pub const OCL_VECTOR_DEFAULT: i32 = 0; pub const OCL_VECTOR_MAX: i32 = 1; pub const OCL_VECTOR_OWN: i32 = 0; pub const OPENCV_ABI_COMPATIBILITY: i32 = 300; /// OpenCL API call error pub const OpenCLApiCallError: i32 = -220; pub const OpenCLDoubleNotSupported: i32 = -221; /// OpenCL initialization error pub const OpenCLInitError: i32 = -222; pub const OpenCLNoAMDBlasFft: i32 = -223; /// OpenGL API call error pub const OpenGlApiCallError: i32 = -219; /// no OpenGL support pub const OpenGlNotSupported: i32 = -218; /// indicates that the input samples are stored as matrix columns pub const PCA_DATA_AS_COL: i32 = 1; /// indicates that the input samples are stored as matrix rows pub const PCA_DATA_AS_ROW: i32 = 0; pub const PCA_USE_AVG: i32 = 2; pub const Param_ALGORITHM: i32 = 6; pub const Param_BOOLEAN: i32 = 1; pub const Param_MAT_VECTOR: i32 = 5; pub const Param_SCALAR: i32 = 12; pub const Param_UCHAR: i32 = 11; pub const Param_UINT64: i32 = 9; pub const Param_UNSIGNED_INT: i32 = 8; /// the output is the mean vector of all rows/columns of the matrix. pub const REDUCE_AVG: i32 = 1; /// the output is the maximum (column/row-wise) of all rows/columns of the matrix. pub const REDUCE_MAX: i32 = 2; /// the output is the minimum (column/row-wise) of all rows/columns of the matrix. pub const REDUCE_MIN: i32 = 3; /// the output is the sum of all rows/columns of the matrix. pub const REDUCE_SUM: i32 = 0; pub const RNG_NORMAL: i32 = 1; pub const RNG_UNIFORM: i32 = 0; /// Rotate 180 degrees clockwise pub const ROTATE_180: i32 = 1; /// Rotate 90 degrees clockwise pub const ROTATE_90_CLOCKWISE: i32 = 0; /// Rotate 270 degrees clockwise pub const ROTATE_90_COUNTERCLOCKWISE: i32 = 2; /// there are multiple maxima for target function - the arbitrary one is returned pub const SOLVELP_MULTI: i32 = 1; /// there is only one maximum for target function pub const SOLVELP_SINGLE: i32 = 0; /// problem is unbounded (target function can achieve arbitrary high values) pub const SOLVELP_UNBOUNDED: i32 = -2; /// problem is unfeasible (there are no points that satisfy all the constraints imposed) pub const SOLVELP_UNFEASIBLE: i32 = -1; /// each matrix row is sorted in the ascending pub const SORT_ASCENDING: i32 = 0; /// each matrix row is sorted in the pub const SORT_DESCENDING: i32 = 16; /// each matrix column is sorted pub const SORT_EVERY_COLUMN: i32 = 1; /// each matrix row is sorted independently pub const SORT_EVERY_ROW: i32 = 0; pub const SVD_FULL_UV: i32 = 4; pub const SVD_MODIFY_A: i32 = 1; pub const SVD_NO_UV: i32 = 2; pub const SparseMat_HASH_BIT: i32 = 0x80000000; pub const SparseMat_HASH_SCALE: i32 = 0x5bd1e995; pub const SparseMat_MAX_DIM: i32 = 32; /// assertion failed pub const StsAssert: i32 = -215; /// tracing pub const StsAutoTrace: i32 = -8; /// pseudo error for back trace pub const StsBackTrace: i32 = -1; /// function arg/param is bad pub const StsBadArg: i32 = -5; /// flag is wrong or not supported pub const StsBadFlag: i32 = -206; /// unsupported function pub const StsBadFunc: i32 = -6; /// bad format of mask (neither 8uC1 nor 8sC1) pub const StsBadMask: i32 = -208; /// an allocated block has been corrupted pub const StsBadMemBlock: i32 = -214; /// bad CvPoint pub const StsBadPoint: i32 = -207; /// the input/output structure size is incorrect pub const StsBadSize: i32 = -201; /// division by zero pub const StsDivByZero: i32 = -202; /// unknown /unspecified error pub const StsError: i32 = -2; /// incorrect filter offset value pub const StsFilterOffsetErr: i32 = -31; /// incorrect filter structure content pub const StsFilterStructContentErr: i32 = -29; /// in-place operation is not supported pub const StsInplaceNotSupported: i32 = -203; /// internal error (bad state) pub const StsInternal: i32 = -3; /// incorrect transform kernel content pub const StsKernelStructContentErr: i32 = -30; /// iteration didn't converge pub const StsNoConv: i32 = -7; /// insufficient memory pub const StsNoMem: i32 = -4; /// the requested function/feature is not implemented pub const StsNotImplemented: i32 = -213; /// null pointer pub const StsNullPtr: i32 = -27; /// request can't be completed pub const StsObjectNotFound: i32 = -204; /// everything is ok pub const StsOk: i32 = 0; /// some of parameters are out of range pub const StsOutOfRange: i32 = -211; /// invalid syntax/structure of the parsed file pub const StsParseError: i32 = -212; /// formats of input/output arrays differ pub const StsUnmatchedFormats: i32 = -205; /// sizes of input/output structures do not match pub const StsUnmatchedSizes: i32 = -209; /// the data format/type is not supported by the function pub const StsUnsupportedFormat: i32 = -210; /// incorrect vector length pub const StsVecLengthErr: i32 = -28; pub const TEST_CUSTOM: i32 = 0; pub const TEST_EQ: i32 = 1; pub const TEST_GE: i32 = 5; pub const TEST_GT: i32 = 6; pub const TEST_LE: i32 = 3; pub const TEST_LT: i32 = 4; pub const TEST_NE: i32 = 2; pub const TYPE_FUN: i32 = 0+3; pub const TYPE_GENERAL: i32 = 0; pub const TYPE_MARKER: i32 = 0+1; pub const TYPE_WRAPPER: i32 = 0+2; /// the maximum number of iterations or elements to compute pub const TermCriteria_COUNT: i32 = 1; /// the desired accuracy or change in parameters at which the iterative algorithm stops pub const TermCriteria_EPS: i32 = 2; /// ditto pub const TermCriteria_MAX_ITER: i32 = 1; pub const UMatData_ASYNC_CLEANUP: i32 = 128; pub const UMatData_COPY_ON_MAP: i32 = 1; pub const UMatData_DEVICE_COPY_OBSOLETE: i32 = 4; pub const UMatData_DEVICE_MEM_MAPPED: i32 = 64; pub const UMatData_HOST_COPY_OBSOLETE: i32 = 2; pub const UMatData_TEMP_COPIED_UMAT: i32 = 24; pub const UMatData_TEMP_UMAT: i32 = 8; pub const UMatData_USER_ALLOCATED: i32 = 32; pub const USAGE_ALLOCATE_DEVICE_MEMORY: i32 = 1 << 1; pub const USAGE_ALLOCATE_HOST_MEMORY: i32 = 1 << 0; pub const USAGE_ALLOCATE_SHARED_MEMORY: i32 = 1 << 2; pub const USAGE_DEFAULT: i32 = 0; pub const _InputArray_KIND_SHIFT: i32 = 16; pub const __UMAT_USAGE_FLAGS_32BIT: i32 = 0x7fffffff; #[repr(C)] #[derive(Copy, Clone, Debug, PartialEq)] pub enum FLAGS { FLAGS_NONE = FLAGS_NONE as isize, FLAGS_MAPPING = FLAGS_MAPPING as isize, FLAGS_EXPAND_SAME_NAMES = FLAGS_EXPAND_SAME_NAMES as isize, } #[repr(C)] #[derive(Copy, Clone, Debug, PartialEq)] pub enum IMPL { IMPL_PLAIN = IMPL_PLAIN as isize, IMPL_IPP = IMPL_IPP as isize, IMPL_OPENCL = IMPL_OPENCL as isize, } /// Supported logging levels and their semantic #[repr(C)] #[derive(Copy, Clone, Debug, PartialEq)] pub enum LogLevel { /// for using in setLogVevel() call LOG_LEVEL_SILENT = LOG_LEVEL_SILENT as isize, /// Fatal (critical) error (unrecoverable internal error) LOG_LEVEL_FATAL = LOG_LEVEL_FATAL as isize, /// Error message LOG_LEVEL_ERROR = LOG_LEVEL_ERROR as isize, /// Warning message LOG_LEVEL_WARNING = LOG_LEVEL_WARNING as isize, /// Info message LOG_LEVEL_INFO = LOG_LEVEL_INFO as isize, /// Debug message. Disabled in the "Release" build. LOG_LEVEL_DEBUG = LOG_LEVEL_DEBUG as isize, /// Verbose (trace) messages. Requires verbosity level. Disabled in the "Release" build. LOG_LEVEL_VERBOSE = LOG_LEVEL_VERBOSE as isize, // ENUM_LOG_LEVEL_FORCE_INT = ENUM_LOG_LEVEL_FORCE_INT as isize, // ignored discriminant } #[repr(C)] #[derive(Copy, Clone, Debug, PartialEq)] pub enum OclVectorStrategy { OCL_VECTOR_OWN = OCL_VECTOR_OWN as isize, OCL_VECTOR_MAX = OCL_VECTOR_MAX as isize, // OCL_VECTOR_DEFAULT = OCL_VECTOR_DEFAULT as isize, // ignored discriminant } #[repr(C)] #[derive(Copy, Clone, Debug, PartialEq)] pub enum TYPE { TYPE_GENERAL = TYPE_GENERAL as isize, TYPE_MARKER = TYPE_MARKER as isize, TYPE_WRAPPER = TYPE_WRAPPER as isize, TYPE_FUN = TYPE_FUN as isize, } /// Usage flags for allocator #[repr(C)] #[derive(Copy, Clone, Debug, PartialEq)] pub enum UMatUsageFlags { USAGE_DEFAULT = USAGE_DEFAULT as isize, USAGE_ALLOCATE_HOST_MEMORY = USAGE_ALLOCATE_HOST_MEMORY as isize, USAGE_ALLOCATE_DEVICE_MEMORY = USAGE_ALLOCATE_DEVICE_MEMORY as isize, USAGE_ALLOCATE_SHARED_MEMORY = USAGE_ALLOCATE_SHARED_MEMORY as isize, __UMAT_USAGE_FLAGS_32BIT = __UMAT_USAGE_FLAGS_32BIT as isize, } pub type Vec8i = core::Vec8<i32>; pub type Vec6d = core::Vec6<f64>; pub type Vec6f = core::Vec6<f32>; pub type Vec6i = core::Vec6<i32>; pub type Vec4d = core::Vec4<f64>; pub type Vec4f = core::Vec4<f32>; pub type Vec4i = core::Vec4<i32>; pub type Vec4w = core::Vec4<u16>; pub type Vec4s = core::Vec4<i16>; pub type Vec4b = core::Vec4<u8>; pub type Vec3d = core::Vec3<f64>; pub type Vec3f = core::Vec3<f32>; pub type Vec3i = core::Vec3<i32>; pub type Vec3w = core::Vec3<u16>; pub type Vec3s = core::Vec3<i16>; pub type Vec3b = core::Vec3<u8>; pub type Vec2d = core::Vec2<f64>; pub type Size2d = core::Size_<f64>; pub type Point2d = core::Point_<f64>; pub type Rect2d = core::Rect_<f64>; pub type Vec2f = core::Vec2<f32>; pub type Size2f = core::Size_<f32>; pub type Point2f = core::Point_<f32>; pub type Rect2f = core::Rect_<f32>; pub type Size2l = core::Size_<i64>; pub type Point2l = core::Point_<i64>; pub type Vec2i = core::Vec2<i32>; pub type Size2i = core::Size_<i32>; pub type Point2i = core::Point_<i32>; pub type Rect2i = core::Rect_<i32>; pub type Size = core::Size_<i32>; pub type Point = core::Point_<i32>; pub type Rect = core::Rect_<i32>; pub type Vec2w = core::Vec2<u16>; pub type Vec2s = core::Vec2<i16>; pub type Vec2b = core::Vec2<u8>; pub type Scalar = core::Scalar_<f64>; /// Class for matching keypoint descriptors /// /// query descriptor index, train descriptor index, train image index, and distance between /// descriptors. #[repr(C)] #[derive(Copy, Clone, Debug, PartialEq)] pub struct DMatch { pub query_idx: i32, pub train_idx: i32, pub img_idx: i32, pub distance: f32, } /// Data structure for salient point detectors. /// /// The class instance stores a keypoint, i.e. a point feature found by one of many available keypoint /// detectors, such as Harris corner detector, #FAST, %StarDetector, %SURF, %SIFT etc. /// /// The keypoint is characterized by the 2D position, scale (proportional to the diameter of the /// neighborhood that needs to be taken into account), orientation and some other parameters. The /// keypoint neighborhood is then analyzed by another algorithm that builds a descriptor (usually /// represented as a feature vector). The keypoints representing the same object in different images /// can then be matched using %KDTree or another method. #[repr(C)] #[derive(Copy, Clone, Debug, PartialEq)] pub struct KeyPoint { pub pt: core::Point2f, pub size: f32, pub angle: f32, pub response: f32, pub octave: i32, pub class_id: i32, } /// struct returned by cv::moments /// /// The spatial moments  are computed as: /// ///  /// /// The central moments  are computed as: /// ///  /// /// where  is the mass center: /// ///  /// /// The normalized central moments  are computed as: /// ///  /// /// /// Note: /// ,  ///  , hence the values are not /// stored. /// /// The moments of a contour are defined in the same way but computed using the Green's formula (see /// <http://en.wikipedia.org/wiki/Green_theorem>). So, due to a limited raster resolution, the moments /// computed for a contour are slightly different from the moments computed for the same rasterized /// contour. /// /// /// Note: /// Since the contour moments are computed using Green formula, you may get seemingly odd results for /// contours with self-intersections, e.g. a zero area (m00) for butterfly-shaped contours. #[repr(C)] #[derive(Copy, Clone, Debug, PartialEq)] pub struct Moments { pub m00: f64, pub m10: f64, pub m01: f64, pub m20: f64, pub m11: f64, pub m02: f64, pub m30: f64, pub m21: f64, pub m12: f64, pub m03: f64, pub mu20: f64, pub mu11: f64, pub mu02: f64, pub mu30: f64, pub mu21: f64, pub mu12: f64, pub mu03: f64, pub nu20: f64, pub nu11: f64, pub nu02: f64, pub nu30: f64, pub nu21: f64, pub nu12: f64, pub nu03: f64, } /// proxy for hal::Cholesky pub fn cholesky(a: &mut f64, astep: size_t, m: i32, b: &mut f64, bstep: size_t, n: i32) -> Result<bool> { unsafe { sys::cv_Cholesky_double_X_size_t_int_double_X_size_t_int(a, astep, m, b, bstep, n) }.into_result() } /// proxy for hal::Cholesky pub fn cholesky_f32(a: &mut f32, astep: size_t, m: i32, b: &mut f32, bstep: size_t, n: i32) -> Result<bool> { unsafe { sys::cv_Cholesky_float_X_size_t_int_float_X_size_t_int(a, astep, m, b, bstep, n) }.into_result() } /// Performs a look-up table transform of an array. /// /// The function LUT fills the output array with values from the look-up table. Indices of the entries /// are taken from the input array. That is, the function processes each element of src as follows: ///  /// where ///  /// ## Parameters /// * src: input array of 8-bit elements. /// * lut: look-up table of 256 elements; in case of multi-channel input array, the table should /// either have a single channel (in this case the same table is used for all channels) or the same /// number of channels as in the input array. /// * dst: output array of the same size and number of channels as src, and the same depth as lut. /// ## See also /// convertScaleAbs, Mat::convertTo pub fn lut(src: &dyn core::ToInputArray, lut: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src); input_array_arg!(lut); output_array_arg!(dst); unsafe { sys::cv_LUT__InputArray__InputArray__OutputArray(src.as_raw__InputArray(), lut.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } /// proxy for hal::LU pub fn lu(a: &mut f64, astep: size_t, m: i32, b: &mut f64, bstep: size_t, n: i32) -> Result<i32> { unsafe { sys::cv_LU_double_X_size_t_int_double_X_size_t_int(a, astep, m, b, bstep, n) }.into_result() } /// proxy for hal::LU pub fn lu_f32(a: &mut f32, astep: size_t, m: i32, b: &mut f32, bstep: size_t, n: i32) -> Result<i32> { unsafe { sys::cv_LU_float_X_size_t_int_float_X_size_t_int(a, astep, m, b, bstep, n) }.into_result() } /// Calculates the Mahalanobis distance between two vectors. /// /// The function cv::Mahalanobis calculates and returns the weighted distance between two vectors: ///  /// The covariance matrix may be calculated using the #calcCovarMatrix function and then inverted using /// the invert function (preferably using the #DECOMP_SVD method, as the most accurate). /// ## Parameters /// * v1: first 1D input vector. /// * v2: second 1D input vector. /// * icovar: inverse covariance matrix. pub fn mahalanobis(v1: &dyn core::ToInputArray, v2: &dyn core::ToInputArray, icovar: &dyn core::ToInputArray) -> Result<f64> { input_array_arg!(v1); input_array_arg!(v2); input_array_arg!(icovar); unsafe { sys::cv_Mahalanobis__InputArray__InputArray__InputArray(v1.as_raw__InputArray(), v2.as_raw__InputArray(), icovar.as_raw__InputArray()) }.into_result() } /// wrap PCA::backProject pub fn pca_back_project(data: &dyn core::ToInputArray, mean: &dyn core::ToInputArray, eigenvectors: &dyn core::ToInputArray, result: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(data); input_array_arg!(mean); input_array_arg!(eigenvectors); output_array_arg!(result); unsafe { sys::cv_PCABackProject__InputArray__InputArray__InputArray__OutputArray(data.as_raw__InputArray(), mean.as_raw__InputArray(), eigenvectors.as_raw__InputArray(), result.as_raw__OutputArray()) }.into_result() } /// wrap PCA::operator() and add eigenvalues output parameter pub fn pca_compute_values_variance(data: &dyn core::ToInputArray, mean: &mut dyn core::ToInputOutputArray, eigenvectors: &mut dyn core::ToOutputArray, eigenvalues: &mut dyn core::ToOutputArray, retained_variance: f64) -> Result<()> { input_array_arg!(data); input_output_array_arg!(mean); output_array_arg!(eigenvectors); output_array_arg!(eigenvalues); unsafe { sys::cv_PCACompute__InputArray__InputOutputArray__OutputArray__OutputArray_double(data.as_raw__InputArray(), mean.as_raw__InputOutputArray(), eigenvectors.as_raw__OutputArray(), eigenvalues.as_raw__OutputArray(), retained_variance) }.into_result() } /// wrap PCA::operator() and add eigenvalues output parameter /// /// ## C++ default parameters /// * max_components: 0 pub fn pca_compute_values(data: &dyn core::ToInputArray, mean: &mut dyn core::ToInputOutputArray, eigenvectors: &mut dyn core::ToOutputArray, eigenvalues: &mut dyn core::ToOutputArray, max_components: i32) -> Result<()> { input_array_arg!(data); input_output_array_arg!(mean); output_array_arg!(eigenvectors); output_array_arg!(eigenvalues); unsafe { sys::cv_PCACompute__InputArray__InputOutputArray__OutputArray__OutputArray_int(data.as_raw__InputArray(), mean.as_raw__InputOutputArray(), eigenvectors.as_raw__OutputArray(), eigenvalues.as_raw__OutputArray(), max_components) }.into_result() } /// wrap PCA::operator() pub fn pca_compute_variance(data: &dyn core::ToInputArray, mean: &mut dyn core::ToInputOutputArray, eigenvectors: &mut dyn core::ToOutputArray, retained_variance: f64) -> Result<()> { input_array_arg!(data); input_output_array_arg!(mean); output_array_arg!(eigenvectors); unsafe { sys::cv_PCACompute__InputArray__InputOutputArray__OutputArray_double(data.as_raw__InputArray(), mean.as_raw__InputOutputArray(), eigenvectors.as_raw__OutputArray(), retained_variance) }.into_result() } /// wrap PCA::operator() /// /// ## C++ default parameters /// * max_components: 0 pub fn pca_compute(data: &dyn core::ToInputArray, mean: &mut dyn core::ToInputOutputArray, eigenvectors: &mut dyn core::ToOutputArray, max_components: i32) -> Result<()> { input_array_arg!(data); input_output_array_arg!(mean); output_array_arg!(eigenvectors); unsafe { sys::cv_PCACompute__InputArray__InputOutputArray__OutputArray_int(data.as_raw__InputArray(), mean.as_raw__InputOutputArray(), eigenvectors.as_raw__OutputArray(), max_components) }.into_result() } /// wrap PCA::project pub fn pca_project(data: &dyn core::ToInputArray, mean: &dyn core::ToInputArray, eigenvectors: &dyn core::ToInputArray, result: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(data); input_array_arg!(mean); input_array_arg!(eigenvectors); output_array_arg!(result); unsafe { sys::cv_PCAProject__InputArray__InputArray__InputArray__OutputArray(data.as_raw__InputArray(), mean.as_raw__InputArray(), eigenvectors.as_raw__InputArray(), result.as_raw__OutputArray()) }.into_result() } /// Computes the Peak Signal-to-Noise Ratio (PSNR) image quality metric. /// /// This function calculates the Peak Signal-to-Noise Ratio (PSNR) image quality metric in decibels (dB), between two input arrays src1 and src2. Arrays must have depth CV_8U. /// /// The PSNR is calculated as follows: /// ///  /// /// where R is the maximum integer value of depth CV_8U (255) and MSE is the mean squared error between the two arrays. /// /// ## Parameters /// * src1: first input array. /// * src2: second input array of the same size as src1. pub fn psnr(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray) -> Result<f64> { input_array_arg!(src1); input_array_arg!(src2); unsafe { sys::cv_PSNR__InputArray__InputArray(src1.as_raw__InputArray(), src2.as_raw__InputArray()) }.into_result() } /// wrap SVD::backSubst pub fn sv_back_subst(w: &dyn core::ToInputArray, u: &dyn core::ToInputArray, vt: &dyn core::ToInputArray, rhs: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(w); input_array_arg!(u); input_array_arg!(vt); input_array_arg!(rhs); output_array_arg!(dst); unsafe { sys::cv_SVBackSubst__InputArray__InputArray__InputArray__InputArray__OutputArray(w.as_raw__InputArray(), u.as_raw__InputArray(), vt.as_raw__InputArray(), rhs.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } /// wrap SVD::compute /// /// ## C++ default parameters /// * flags: 0 pub fn sv_decomp(src: &dyn core::ToInputArray, w: &mut dyn core::ToOutputArray, u: &mut dyn core::ToOutputArray, vt: &mut dyn core::ToOutputArray, flags: i32) -> Result<()> { input_array_arg!(src); output_array_arg!(w); output_array_arg!(u); output_array_arg!(vt); unsafe { sys::cv_SVDecomp__InputArray__OutputArray__OutputArray__OutputArray_int(src.as_raw__InputArray(), w.as_raw__OutputArray(), u.as_raw__OutputArray(), vt.as_raw__OutputArray(), flags) }.into_result() } pub fn string() -> Result<()> { unsafe { sys::cv_String_const() }.into_result() } /// Calculates an absolute value of each matrix element. /// /// abs is a meta-function that is expanded to one of absdiff or convertScaleAbs forms: /// - C = abs(A-B) is equivalent to `absdiff(A, B, C)` /// - C = abs(A) is equivalent to `absdiff(A, Scalar::all(0), C)` /// - C = `Mat_<Vec<uchar,n> >(abs(A*alpha + beta))` is equivalent to `convertScaleAbs(A, C, alpha, /// beta)` /// /// The output matrix has the same size and the same type as the input one except for the last case, /// where C is depth=CV_8U . /// ## Parameters /// * m: matrix. /// ## See also /// @ref MatrixExpressions, absdiff, convertScaleAbs pub fn abs(m: &core::Mat) -> Result<core::MatExpr> { unsafe { sys::cv_abs_Mat(m.as_raw_Mat()) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// Calculates an absolute value of each matrix element. /// /// abs is a meta-function that is expanded to one of absdiff or convertScaleAbs forms: /// - C = abs(A-B) is equivalent to `absdiff(A, B, C)` /// - C = abs(A) is equivalent to `absdiff(A, Scalar::all(0), C)` /// - C = `Mat_<Vec<uchar,n> >(abs(A*alpha + beta))` is equivalent to `convertScaleAbs(A, C, alpha, /// beta)` /// /// The output matrix has the same size and the same type as the input one except for the last case, /// where C is depth=CV_8U . /// ## Parameters /// * m: matrix. /// ## See also /// @ref MatrixExpressions, absdiff, convertScaleAbs /// /// ## Overloaded parameters /// /// * e: matrix expression. pub fn abs_matexpr(e: &core::MatExpr) -> Result<core::MatExpr> { unsafe { sys::cv_abs_MatExpr(e.as_raw_MatExpr()) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// Calculates the per-element absolute difference between two arrays or between an array and a scalar. /// /// The function cv::absdiff calculates: /// Absolute difference between two arrays when they have the same /// size and type: ///  /// Absolute difference between an array and a scalar when the second /// array is constructed from Scalar or has as many elements as the /// number of channels in `src1`: ///  /// Absolute difference between a scalar and an array when the first /// array is constructed from Scalar or has as many elements as the /// number of channels in `src2`: ///  /// where I is a multi-dimensional index of array elements. In case of /// multi-channel arrays, each channel is processed independently. /// /// Note: Saturation is not applied when the arrays have the depth CV_32S. /// You may even get a negative value in the case of overflow. /// ## Parameters /// * src1: first input array or a scalar. /// * src2: second input array or a scalar. /// * dst: output array that has the same size and type as input arrays. /// ## See also /// cv::abs(const Mat&) pub fn absdiff(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); unsafe { sys::cv_absdiff__InputArray__InputArray__OutputArray(src1.as_raw__InputArray(), src2.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } /// Calculates the weighted sum of two arrays. /// /// The function addWeighted calculates the weighted sum of two arrays as follows: ///  /// where I is a multi-dimensional index of array elements. In case of multi-channel arrays, each /// channel is processed independently. /// The function can be replaced with a matrix expression: /// ```ignore{.cpp} /// dst = src1*alpha + src2*beta + gamma; /// ``` /// /// /// Note: Saturation is not applied when the output array has the depth CV_32S. You may even get /// result of an incorrect sign in the case of overflow. /// ## Parameters /// * src1: first input array. /// * alpha: weight of the first array elements. /// * src2: second input array of the same size and channel number as src1. /// * beta: weight of the second array elements. /// * gamma: scalar added to each sum. /// * dst: output array that has the same size and number of channels as the input arrays. /// * dtype: optional depth of the output array; when both input arrays have the same depth, dtype /// can be set to -1, which will be equivalent to src1.depth(). /// ## See also /// add, subtract, scaleAdd, Mat::convertTo /// /// ## C++ default parameters /// * dtype: -1 pub fn add_weighted(src1: &dyn core::ToInputArray, alpha: f64, src2: &dyn core::ToInputArray, beta: f64, gamma: f64, dst: &mut dyn core::ToOutputArray, dtype: i32) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); unsafe { sys::cv_addWeighted__InputArray_double__InputArray_double_double__OutputArray_int(src1.as_raw__InputArray(), alpha, src2.as_raw__InputArray(), beta, gamma, dst.as_raw__OutputArray(), dtype) }.into_result() } /// Calculates the per-element sum of two arrays or an array and a scalar. /// /// The function add calculates: /// - Sum of two arrays when both input arrays have the same size and the same number of channels: ///  /// - Sum of an array and a scalar when src2 is constructed from Scalar or has the same number of /// elements as `src1.channels()`: ///  /// - Sum of a scalar and an array when src1 is constructed from Scalar or has the same number of /// elements as `src2.channels()`: ///  /// where `I` is a multi-dimensional index of array elements. In case of multi-channel arrays, each /// channel is processed independently. /// /// The first function in the list above can be replaced with matrix expressions: /// ```ignore{.cpp} /// dst = src1 + src2; /// dst += src1; // equivalent to add(dst, src1, dst); /// ``` /// /// The input arrays and the output array can all have the same or different depths. For example, you /// can add a 16-bit unsigned array to a 8-bit signed array and store the sum as a 32-bit /// floating-point array. Depth of the output array is determined by the dtype parameter. In the second /// and third cases above, as well as in the first case, when src1.depth() == src2.depth(), dtype can /// be set to the default -1. In this case, the output array will have the same depth as the input /// array, be it src1, src2 or both. /// /// Note: Saturation is not applied when the output array has the depth CV_32S. You may even get /// result of an incorrect sign in the case of overflow. /// ## Parameters /// * src1: first input array or a scalar. /// * src2: second input array or a scalar. /// * dst: output array that has the same size and number of channels as the input array(s); the /// depth is defined by dtype or src1/src2. /// * mask: optional operation mask - 8-bit single channel array, that specifies elements of the /// output array to be changed. /// * dtype: optional depth of the output array (see the discussion below). /// ## See also /// subtract, addWeighted, scaleAdd, Mat::convertTo /// /// ## C++ default parameters /// * mask: noArray() /// * dtype: -1 pub fn add(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, mask: &dyn core::ToInputArray, dtype: i32) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); input_array_arg!(mask); unsafe { sys::cv_add__InputArray__InputArray__OutputArray__InputArray_int(src1.as_raw__InputArray(), src2.as_raw__InputArray(), dst.as_raw__OutputArray(), mask.as_raw__InputArray(), dtype) }.into_result() } /// Aligns a buffer size to the specified number of bytes. /// /// The function returns the minimum number that is greater than or equal to sz and is divisible by n : ///  /// ## Parameters /// * sz: Buffer size to align. /// * n: Alignment size that must be a power of two. pub fn align_size(sz: size_t, n: i32) -> Result<size_t> { unsafe { sys::cv_alignSize_size_t_int(sz, n) }.into_result() } /// naive nearest neighbor finder /// /// see http://en.wikipedia.org/wiki/Nearest_neighbor_search /// @todo document /// /// ## C++ default parameters /// * norm_type: NORM_L2 /// * k: 0 /// * mask: noArray() /// * update: 0 /// * crosscheck: false pub fn batch_distance(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, dist: &mut dyn core::ToOutputArray, dtype: i32, nidx: &mut dyn core::ToOutputArray, norm_type: i32, k: i32, mask: &dyn core::ToInputArray, update: i32, crosscheck: bool) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dist); output_array_arg!(nidx); input_array_arg!(mask); unsafe { sys::cv_batchDistance__InputArray__InputArray__OutputArray_int__OutputArray_int_int__InputArray_int_bool(src1.as_raw__InputArray(), src2.as_raw__InputArray(), dist.as_raw__OutputArray(), dtype, nidx.as_raw__OutputArray(), norm_type, k, mask.as_raw__InputArray(), update, crosscheck) }.into_result() } /// computes bitwise conjunction of the two arrays (dst = src1 & src2) /// Calculates the per-element bit-wise conjunction of two arrays or an /// array and a scalar. /// /// The function cv::bitwise_and calculates the per-element bit-wise logical conjunction for: /// Two arrays when src1 and src2 have the same size: ///  /// An array and a scalar when src2 is constructed from Scalar or has /// the same number of elements as `src1.channels()`: ///  /// A scalar and an array when src1 is constructed from Scalar or has /// the same number of elements as `src2.channels()`: ///  /// In case of floating-point arrays, their machine-specific bit /// representations (usually IEEE754-compliant) are used for the operation. /// In case of multi-channel arrays, each channel is processed /// independently. In the second and third cases above, the scalar is first /// converted to the array type. /// ## Parameters /// * src1: first input array or a scalar. /// * src2: second input array or a scalar. /// * dst: output array that has the same size and type as the input /// arrays. /// * mask: optional operation mask, 8-bit single channel array, that /// specifies elements of the output array to be changed. /// /// ## C++ default parameters /// * mask: noArray() pub fn bitwise_and(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, mask: &dyn core::ToInputArray) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); input_array_arg!(mask); unsafe { sys::cv_bitwise_and__InputArray__InputArray__OutputArray__InputArray(src1.as_raw__InputArray(), src2.as_raw__InputArray(), dst.as_raw__OutputArray(), mask.as_raw__InputArray()) }.into_result() } /// Inverts every bit of an array. /// /// The function cv::bitwise_not calculates per-element bit-wise inversion of the input /// array: ///  /// In case of a floating-point input array, its machine-specific bit /// representation (usually IEEE754-compliant) is used for the operation. In /// case of multi-channel arrays, each channel is processed independently. /// ## Parameters /// * src: input array. /// * dst: output array that has the same size and type as the input /// array. /// * mask: optional operation mask, 8-bit single channel array, that /// specifies elements of the output array to be changed. /// /// ## C++ default parameters /// * mask: noArray() pub fn bitwise_not(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, mask: &dyn core::ToInputArray) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); input_array_arg!(mask); unsafe { sys::cv_bitwise_not__InputArray__OutputArray__InputArray(src.as_raw__InputArray(), dst.as_raw__OutputArray(), mask.as_raw__InputArray()) }.into_result() } /// Calculates the per-element bit-wise disjunction of two arrays or an /// array and a scalar. /// /// The function cv::bitwise_or calculates the per-element bit-wise logical disjunction for: /// Two arrays when src1 and src2 have the same size: ///  /// An array and a scalar when src2 is constructed from Scalar or has /// the same number of elements as `src1.channels()`: ///  /// A scalar and an array when src1 is constructed from Scalar or has /// the same number of elements as `src2.channels()`: ///  /// In case of floating-point arrays, their machine-specific bit /// representations (usually IEEE754-compliant) are used for the operation. /// In case of multi-channel arrays, each channel is processed /// independently. In the second and third cases above, the scalar is first /// converted to the array type. /// ## Parameters /// * src1: first input array or a scalar. /// * src2: second input array or a scalar. /// * dst: output array that has the same size and type as the input /// arrays. /// * mask: optional operation mask, 8-bit single channel array, that /// specifies elements of the output array to be changed. /// /// ## C++ default parameters /// * mask: noArray() pub fn bitwise_or(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, mask: &dyn core::ToInputArray) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); input_array_arg!(mask); unsafe { sys::cv_bitwise_or__InputArray__InputArray__OutputArray__InputArray(src1.as_raw__InputArray(), src2.as_raw__InputArray(), dst.as_raw__OutputArray(), mask.as_raw__InputArray()) }.into_result() } /// Calculates the per-element bit-wise "exclusive or" operation on two /// arrays or an array and a scalar. /// /// The function cv::bitwise_xor calculates the per-element bit-wise logical "exclusive-or" /// operation for: /// Two arrays when src1 and src2 have the same size: ///  /// An array and a scalar when src2 is constructed from Scalar or has /// the same number of elements as `src1.channels()`: ///  /// A scalar and an array when src1 is constructed from Scalar or has /// the same number of elements as `src2.channels()`: ///  /// In case of floating-point arrays, their machine-specific bit /// representations (usually IEEE754-compliant) are used for the operation. /// In case of multi-channel arrays, each channel is processed /// independently. In the 2nd and 3rd cases above, the scalar is first /// converted to the array type. /// ## Parameters /// * src1: first input array or a scalar. /// * src2: second input array or a scalar. /// * dst: output array that has the same size and type as the input /// arrays. /// * mask: optional operation mask, 8-bit single channel array, that /// specifies elements of the output array to be changed. /// /// ## C++ default parameters /// * mask: noArray() pub fn bitwise_xor(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, mask: &dyn core::ToInputArray) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); input_array_arg!(mask); unsafe { sys::cv_bitwise_xor__InputArray__InputArray__OutputArray__InputArray(src1.as_raw__InputArray(), src2.as_raw__InputArray(), dst.as_raw__OutputArray(), mask.as_raw__InputArray()) }.into_result() } /// Computes the source location of an extrapolated pixel. /// /// The function computes and returns the coordinate of a donor pixel corresponding to the specified /// extrapolated pixel when using the specified extrapolation border mode. For example, if you use /// cv::BORDER_WRAP mode in the horizontal direction, cv::BORDER_REFLECT_101 in the vertical direction and /// want to compute value of the "virtual" pixel Point(-5, 100) in a floating-point image img , it /// looks like: /// ```ignore{.cpp} /// float val = img.at<float>(borderInterpolate(100, img.rows, cv::BORDER_REFLECT_101), /// borderInterpolate(-5, img.cols, cv::BORDER_WRAP)); /// ``` /// /// Normally, the function is not called directly. It is used inside filtering functions and also in /// copyMakeBorder. /// ## Parameters /// * p: 0-based coordinate of the extrapolated pixel along one of the axes, likely \<0 or \>= len /// * len: Length of the array along the corresponding axis. /// * borderType: Border type, one of the #BorderTypes, except for #BORDER_TRANSPARENT and /// #BORDER_ISOLATED . When borderType==#BORDER_CONSTANT , the function always returns -1, regardless /// of p and len. /// /// ## See also /// copyMakeBorder pub fn border_interpolate(p: i32, len: i32, border_type: i32) -> Result<i32> { unsafe { sys::cv_borderInterpolate_int_int_int(p, len, border_type) }.into_result() } /// Calculates the covariance matrix of a set of vectors. /// /// The function cv::calcCovarMatrix calculates the covariance matrix and, optionally, the mean vector of /// the set of input vectors. /// ## Parameters /// * samples: samples stored as separate matrices /// * nsamples: number of samples /// * covar: output covariance matrix of the type ctype and square size. /// * mean: input or output (depending on the flags) array as the average value of the input vectors. /// * flags: operation flags as a combination of #CovarFlags /// * ctype: type of the matrixl; it equals 'CV_64F' by default. /// ## See also /// PCA, mulTransposed, Mahalanobis /// @todo InputArrayOfArrays /// /// ## Overloaded parameters /// /// /// Note: use #COVAR_ROWS or #COVAR_COLS flag /// * samples: samples stored as rows/columns of a single matrix. /// * covar: output covariance matrix of the type ctype and square size. /// * mean: input or output (depending on the flags) array as the average value of the input vectors. /// * flags: operation flags as a combination of #CovarFlags /// * ctype: type of the matrixl; it equals 'CV_64F' by default. /// /// ## C++ default parameters /// * ctype: CV_64F pub fn calc_covar_matrix(samples: &dyn core::ToInputArray, covar: &mut dyn core::ToOutputArray, mean: &mut dyn core::ToInputOutputArray, flags: i32, ctype: i32) -> Result<()> { input_array_arg!(samples); output_array_arg!(covar); input_output_array_arg!(mean); unsafe { sys::cv_calcCovarMatrix__InputArray__OutputArray__InputOutputArray_int_int(samples.as_raw__InputArray(), covar.as_raw__OutputArray(), mean.as_raw__InputOutputArray(), flags, ctype) }.into_result() } /// Calculates the magnitude and angle of 2D vectors. /// /// The function cv::cartToPolar calculates either the magnitude, angle, or both /// for every 2D vector (x(I),y(I)): ///  /// /// The angles are calculated with accuracy about 0.3 degrees. For the point /// (0,0), the angle is set to 0. /// ## Parameters /// * x: array of x-coordinates; this must be a single-precision or /// double-precision floating-point array. /// * y: array of y-coordinates, that must have the same size and same type as x. /// * magnitude: output array of magnitudes of the same size and type as x. /// * angle: output array of angles that has the same size and type as /// x; the angles are measured in radians (from 0 to 2\*Pi) or in degrees (0 to 360 degrees). /// * angleInDegrees: a flag, indicating whether the angles are measured /// in radians (which is by default), or in degrees. /// ## See also /// Sobel, Scharr /// /// ## C++ default parameters /// * angle_in_degrees: false pub fn cart_to_polar(x: &dyn core::ToInputArray, y: &dyn core::ToInputArray, magnitude: &mut dyn core::ToOutputArray, angle: &mut dyn core::ToOutputArray, angle_in_degrees: bool) -> Result<()> { input_array_arg!(x); input_array_arg!(y); output_array_arg!(magnitude); output_array_arg!(angle); unsafe { sys::cv_cartToPolar__InputArray__InputArray__OutputArray__OutputArray_bool(x.as_raw__InputArray(), y.as_raw__InputArray(), magnitude.as_raw__OutputArray(), angle.as_raw__OutputArray(), angle_in_degrees) }.into_result() } /// Returns true if the specified feature is supported by the host hardware. /// /// The function returns true if the host hardware supports the specified feature. When user calls /// setUseOptimized(false), the subsequent calls to checkHardwareSupport() will return false until /// setUseOptimized(true) is called. This way user can dynamically switch on and off the optimized code /// in OpenCV. /// ## Parameters /// * feature: The feature of interest, one of cv::CpuFeatures pub fn check_hardware_support(feature: i32) -> Result<bool> { unsafe { sys::cv_checkHardwareSupport_int(feature) }.into_result() } /// Checks every element of an input array for invalid values. /// /// The function cv::checkRange checks that every array element is neither NaN nor infinite. When minVal \> /// -DBL_MAX and maxVal \< DBL_MAX, the function also checks that each value is between minVal and /// maxVal. In case of multi-channel arrays, each channel is processed independently. If some values /// are out of range, position of the first outlier is stored in pos (when pos != NULL). Then, the /// function either returns false (when quiet=true) or throws an exception. /// ## Parameters /// * a: input array. /// * quiet: a flag, indicating whether the functions quietly return false when the array elements /// are out of range or they throw an exception. /// * pos: optional output parameter, when not NULL, must be a pointer to array of src.dims /// elements. /// * minVal: inclusive lower boundary of valid values range. /// * maxVal: exclusive upper boundary of valid values range. /// /// ## C++ default parameters /// * quiet: true /// * pos: 0 /// * min_val: -DBL_MAX /// * max_val: DBL_MAX pub fn check_range(a: &dyn core::ToInputArray, quiet: bool, pos: &mut core::Point, min_val: f64, max_val: f64) -> Result<bool> { input_array_arg!(a); unsafe { sys::cv_checkRange__InputArray_bool_Point_X_double_double(a.as_raw__InputArray(), quiet, pos, min_val, max_val) }.into_result() } /// Performs the per-element comparison of two arrays or an array and scalar value. /// /// The function compares: /// Elements of two arrays when src1 and src2 have the same size: ///  /// Elements of src1 with a scalar src2 when src2 is constructed from /// Scalar or has a single element: ///  /// src1 with elements of src2 when src1 is constructed from Scalar or /// has a single element: ///  /// When the comparison result is true, the corresponding element of output /// array is set to 255. The comparison operations can be replaced with the /// equivalent matrix expressions: /// ```ignore{.cpp} /// Mat dst1 = src1 >= src2; /// Mat dst2 = src1 < 8; /// ... /// ``` /// /// ## Parameters /// * src1: first input array or a scalar; when it is an array, it must have a single channel. /// * src2: second input array or a scalar; when it is an array, it must have a single channel. /// * dst: output array of type ref CV_8U that has the same size and the same number of channels as /// the input arrays. /// * cmpop: a flag, that specifies correspondence between the arrays (cv::CmpTypes) /// ## See also /// checkRange, min, max, threshold pub fn compare(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, cmpop: i32) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); unsafe { sys::cv_compare__InputArray__InputArray__OutputArray_int(src1.as_raw__InputArray(), src2.as_raw__InputArray(), dst.as_raw__OutputArray(), cmpop) }.into_result() } /// Copies the lower or the upper half of a square matrix to its another half. /// /// The function cv::completeSymm copies the lower or the upper half of a square matrix to /// its another half. The matrix diagonal remains unchanged: /// -  for  if /// lowerToUpper=false /// -  for  if /// lowerToUpper=true /// /// ## Parameters /// * m: input-output floating-point square matrix. /// * lowerToUpper: operation flag; if true, the lower half is copied to /// the upper half. Otherwise, the upper half is copied to the lower half. /// ## See also /// flip, transpose /// /// ## C++ default parameters /// * lower_to_upper: false pub fn complete_symm(m: &mut dyn core::ToInputOutputArray, lower_to_upper: bool) -> Result<()> { input_output_array_arg!(m); unsafe { sys::cv_completeSymm__InputOutputArray_bool(m.as_raw__InputOutputArray(), lower_to_upper) }.into_result() } /// Converts an array to half precision floating number. /// /// This function converts FP32 (single precision floating point) from/to FP16 (half precision floating point). CV_16S format is used to represent FP16 data. /// There are two use modes (src -> dst): CV_32F -> CV_16S and CV_16S -> CV_32F. The input array has to have type of CV_32F or /// CV_16S to represent the bit depth. If the input array is neither of them, the function will raise an error. /// The format of half precision floating point is defined in IEEE 754-2008. /// /// ## Parameters /// * src: input array. /// * dst: output array. pub fn convert_fp16(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_convertFp16__InputArray__OutputArray(src.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } /// Scales, calculates absolute values, and converts the result to 8-bit. /// /// On each element of the input array, the function convertScaleAbs /// performs three operations sequentially: scaling, taking an absolute /// value, conversion to an unsigned 8-bit type: ///  /// In case of multi-channel arrays, the function processes each channel /// independently. When the output is not 8-bit, the operation can be /// emulated by calling the Mat::convertTo method (or by using matrix /// expressions) and then by calculating an absolute value of the result. /// For example: /// ```ignore{.cpp} /// Mat_<float> A(30,30); /// randu(A, Scalar(-100), Scalar(100)); /// Mat_<float> B = A*5 + 3; /// B = abs(B); /// // Mat_<float> B = abs(A*5+3) will also do the job, /// // but it will allocate a temporary matrix /// ``` /// /// ## Parameters /// * src: input array. /// * dst: output array. /// * alpha: optional scale factor. /// * beta: optional delta added to the scaled values. /// ## See also /// Mat::convertTo, cv::abs(const Mat&) /// /// ## C++ default parameters /// * alpha: 1 /// * beta: 0 pub fn convert_scale_abs(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, alpha: f64, beta: f64) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_convertScaleAbs__InputArray__OutputArray_double_double(src.as_raw__InputArray(), dst.as_raw__OutputArray(), alpha, beta) }.into_result() } /// Forms a border around an image. /// /// The function copies the source image into the middle of the destination image. The areas to the /// left, to the right, above and below the copied source image will be filled with extrapolated /// pixels. This is not what filtering functions based on it do (they extrapolate pixels on-fly), but /// what other more complex functions, including your own, may do to simplify image boundary handling. /// /// The function supports the mode when src is already in the middle of dst . In this case, the /// function does not copy src itself but simply constructs the border, for example: /// /// ```ignore{.cpp} /// // let border be the same in all directions /// int border=2; /// // constructs a larger image to fit both the image and the border /// Mat gray_buf(rgb.rows + border*2, rgb.cols + border*2, rgb.depth()); /// // select the middle part of it w/o copying data /// Mat gray(gray_canvas, Rect(border, border, rgb.cols, rgb.rows)); /// // convert image from RGB to grayscale /// cvtColor(rgb, gray, COLOR_RGB2GRAY); /// // form a border in-place /// copyMakeBorder(gray, gray_buf, border, border, /// border, border, BORDER_REPLICATE); /// // now do some custom filtering ... /// ... /// ``` /// /// /// Note: When the source image is a part (ROI) of a bigger image, the function will try to use the /// pixels outside of the ROI to form a border. To disable this feature and always do extrapolation, as /// if src was not a ROI, use borderType | #BORDER_ISOLATED. /// /// ## Parameters /// * src: Source image. /// * dst: Destination image of the same type as src and the size Size(src.cols+left+right, /// src.rows+top+bottom) . /// * top: the top pixels /// * bottom: the bottom pixels /// * left: the left pixels /// * right: Parameter specifying how many pixels in each direction from the source image rectangle /// to extrapolate. For example, top=1, bottom=1, left=1, right=1 mean that 1 pixel-wide border needs /// to be built. /// * borderType: Border type. See borderInterpolate for details. /// * value: Border value if borderType==BORDER_CONSTANT . /// /// ## See also /// borderInterpolate /// /// ## C++ default parameters /// * value: Scalar() pub fn copy_make_border(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, top: i32, bottom: i32, left: i32, right: i32, border_type: i32, value: core::Scalar) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_copyMakeBorder__InputArray__OutputArray_int_int_int_int_int_Scalar(src.as_raw__InputArray(), dst.as_raw__OutputArray(), top, bottom, left, right, border_type, value) }.into_result() } /// Counts non-zero array elements. /// /// The function returns the number of non-zero elements in src : ///  /// ## Parameters /// * src: single-channel array. /// ## See also /// mean, meanStdDev, norm, minMaxLoc, calcCovarMatrix pub fn count_non_zero(src: &dyn core::ToInputArray) -> Result<i32> { input_array_arg!(src); unsafe { sys::cv_countNonZero__InputArray(src.as_raw__InputArray()) }.into_result() } /// Computes the cube root of an argument. /// /// The function cubeRoot computes . Negative arguments are handled correctly. /// NaN and Inf are not handled. The accuracy approaches the maximum possible accuracy for /// single-precision data. /// ## Parameters /// * val: A function argument. pub fn cube_root(val: f32) -> Result<f32> { unsafe { sys::cv_cubeRoot_float(val) }.into_result() } pub fn cv_abs(x: i8) -> Result<i32> { unsafe { sys::cv_cv_abs_schar(x) }.into_result() } pub fn cv_abs_1(x: u16) -> Result<i32> { unsafe { sys::cv_cv_abs_ushort(x) }.into_result() } /// Performs a forward or inverse discrete Cosine transform of 1D or 2D array. /// /// The function cv::dct performs a forward or inverse discrete Cosine transform (DCT) of a 1D or 2D /// floating-point array: /// * Forward Cosine transform of a 1D vector of N elements: ///  /// where ///  /// and /// ,  for *j \> 0*. /// * Inverse Cosine transform of a 1D vector of N elements: ///  /// (since  is an orthogonal matrix,  ) /// * Forward 2D Cosine transform of M x N matrix: ///  /// * Inverse 2D Cosine transform of M x N matrix: ///  /// /// The function chooses the mode of operation by looking at the flags and size of the input array: /// * If (flags & #DCT_INVERSE) == 0 , the function does a forward 1D or 2D transform. Otherwise, it /// is an inverse 1D or 2D transform. /// * If (flags & #DCT_ROWS) != 0 , the function performs a 1D transform of each row. /// * If the array is a single column or a single row, the function performs a 1D transform. /// * If none of the above is true, the function performs a 2D transform. /// /// /// Note: Currently dct supports even-size arrays (2, 4, 6 ...). For data analysis and approximation, you /// can pad the array when necessary. /// Also, the function performance depends very much, and not monotonically, on the array size (see /// getOptimalDFTSize ). In the current implementation DCT of a vector of size N is calculated via DFT /// of a vector of size N/2 . Thus, the optimal DCT size N1 \>= N can be calculated as: /// ```ignore /// size_t getOptimalDCTSize(size_t N) { return 2*getOptimalDFTSize((N+1)/2); } /// N1 = getOptimalDCTSize(N); /// ``` /// /// ## Parameters /// * src: input floating-point array. /// * dst: output array of the same size and type as src . /// * flags: transformation flags as a combination of cv::DftFlags (DCT_*) /// ## See also /// dft , getOptimalDFTSize , idct /// /// ## C++ default parameters /// * flags: 0 pub fn dct(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, flags: i32) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_dct__InputArray__OutputArray_int(src.as_raw__InputArray(), dst.as_raw__OutputArray(), flags) }.into_result() } /// Returns string of cv::Mat depth value: CV_8U -> "CV_8U" or "<invalid depth>" pub fn depth_to_string(depth: i32) -> Result<String> { unsafe { sys::cv_depthToString_int(depth) }.into_result().map(crate::templ::receive_string) } pub fn check_failed_mat_channels(v: i32, ctx: &core::CheckContext) -> Result<()> { unsafe { sys::cv_detail_check_failed_MatChannels_int_CheckContext(v, ctx.as_raw_CheckContext()) }.into_result() } pub fn check_failed_mat_channels_1(v1: i32, v2: i32, ctx: &core::CheckContext) -> Result<()> { unsafe { sys::cv_detail_check_failed_MatChannels_int_int_CheckContext(v1, v2, ctx.as_raw_CheckContext()) }.into_result() } pub fn check_failed_mat_depth(v: i32, ctx: &core::CheckContext) -> Result<()> { unsafe { sys::cv_detail_check_failed_MatDepth_int_CheckContext(v, ctx.as_raw_CheckContext()) }.into_result() } pub fn check_failed_mat_depth_1(v1: i32, v2: i32, ctx: &core::CheckContext) -> Result<()> { unsafe { sys::cv_detail_check_failed_MatDepth_int_int_CheckContext(v1, v2, ctx.as_raw_CheckContext()) }.into_result() } pub fn check_failed_mat_type(v: i32, ctx: &core::CheckContext) -> Result<()> { unsafe { sys::cv_detail_check_failed_MatType_int_CheckContext(v, ctx.as_raw_CheckContext()) }.into_result() } pub fn check_failed_mat_type_1(v1: i32, v2: i32, ctx: &core::CheckContext) -> Result<()> { unsafe { sys::cv_detail_check_failed_MatType_int_int_CheckContext(v1, v2, ctx.as_raw_CheckContext()) }.into_result() } pub fn check_failed_auto(v: f64, ctx: &core::CheckContext) -> Result<()> { unsafe { sys::cv_detail_check_failed_auto_double_CheckContext(v, ctx.as_raw_CheckContext()) }.into_result() } pub fn check_failed_auto_1(v1: f64, v2: f64, ctx: &core::CheckContext) -> Result<()> { unsafe { sys::cv_detail_check_failed_auto_double_double_CheckContext(v1, v2, ctx.as_raw_CheckContext()) }.into_result() } pub fn check_failed_auto_2(v: f32, ctx: &core::CheckContext) -> Result<()> { unsafe { sys::cv_detail_check_failed_auto_float_CheckContext(v, ctx.as_raw_CheckContext()) }.into_result() } pub fn check_failed_auto_3(v1: f32, v2: f32, ctx: &core::CheckContext) -> Result<()> { unsafe { sys::cv_detail_check_failed_auto_float_float_CheckContext(v1, v2, ctx.as_raw_CheckContext()) }.into_result() } pub fn check_failed_auto_4(v: i32, ctx: &core::CheckContext) -> Result<()> { unsafe { sys::cv_detail_check_failed_auto_int_CheckContext(v, ctx.as_raw_CheckContext()) }.into_result() } pub fn check_failed_auto_5(v1: i32, v2: i32, ctx: &core::CheckContext) -> Result<()> { unsafe { sys::cv_detail_check_failed_auto_int_int_CheckContext(v1, v2, ctx.as_raw_CheckContext()) }.into_result() } pub fn check_failed_auto_6(v: size_t, ctx: &core::CheckContext) -> Result<()> { unsafe { sys::cv_detail_check_failed_auto_size_t_CheckContext(v, ctx.as_raw_CheckContext()) }.into_result() } pub fn check_failed_auto_7(v1: size_t, v2: size_t, ctx: &core::CheckContext) -> Result<()> { unsafe { sys::cv_detail_check_failed_auto_size_t_size_t_CheckContext(v1, v2, ctx.as_raw_CheckContext()) }.into_result() } /// Returns the determinant of a square floating-point matrix. /// /// The function cv::determinant calculates and returns the determinant of the /// specified matrix. For small matrices ( mtx.cols=mtx.rows\<=3 ), the /// direct method is used. For larger matrices, the function uses LU /// factorization with partial pivoting. /// /// For symmetric positively-determined matrices, it is also possible to use /// eigen decomposition to calculate the determinant. /// ## Parameters /// * mtx: input matrix that must have CV_32FC1 or CV_64FC1 type and /// square size. /// ## See also /// trace, invert, solve, eigen, @ref MatrixExpressions pub fn determinant(mtx: &dyn core::ToInputArray) -> Result<f64> { input_array_arg!(mtx); unsafe { sys::cv_determinant__InputArray(mtx.as_raw__InputArray()) }.into_result() } /// Performs a forward or inverse Discrete Fourier transform of a 1D or 2D floating-point array. /// /// The function cv::dft performs one of the following: /// * Forward the Fourier transform of a 1D vector of N elements: ///  /// where  and  /// * Inverse the Fourier transform of a 1D vector of N elements: ///  /// where  /// * Forward the 2D Fourier transform of a M x N matrix: ///  /// * Inverse the 2D Fourier transform of a M x N matrix: ///  /// /// In case of real (single-channel) data, the output spectrum of the forward Fourier transform or input /// spectrum of the inverse Fourier transform can be represented in a packed format called *CCS* /// (complex-conjugate-symmetrical). It was borrowed from IPL (Intel\* Image Processing Library). Here /// is how 2D *CCS* spectrum looks: ///  /// /// In case of 1D transform of a real vector, the output looks like the first row of the matrix above. /// /// So, the function chooses an operation mode depending on the flags and size of the input array: /// * If #DFT_ROWS is set or the input array has a single row or single column, the function /// performs a 1D forward or inverse transform of each row of a matrix when #DFT_ROWS is set. /// Otherwise, it performs a 2D transform. /// * If the input array is real and #DFT_INVERSE is not set, the function performs a forward 1D or /// 2D transform: /// * When #DFT_COMPLEX_OUTPUT is set, the output is a complex matrix of the same size as /// input. /// * When #DFT_COMPLEX_OUTPUT is not set, the output is a real matrix of the same size as /// input. In case of 2D transform, it uses the packed format as shown above. In case of a /// single 1D transform, it looks like the first row of the matrix above. In case of /// multiple 1D transforms (when using the #DFT_ROWS flag), each row of the output matrix /// looks like the first row of the matrix above. /// * If the input array is complex and either #DFT_INVERSE or #DFT_REAL_OUTPUT are not set, the /// output is a complex array of the same size as input. The function performs a forward or /// inverse 1D or 2D transform of the whole input array or each row of the input array /// independently, depending on the flags DFT_INVERSE and DFT_ROWS. /// * When #DFT_INVERSE is set and the input array is real, or it is complex but #DFT_REAL_OUTPUT /// is set, the output is a real array of the same size as input. The function performs a 1D or 2D /// inverse transformation of the whole input array or each individual row, depending on the flags /// #DFT_INVERSE and #DFT_ROWS. /// /// If #DFT_SCALE is set, the scaling is done after the transformation. /// /// Unlike dct , the function supports arrays of arbitrary size. But only those arrays are processed /// efficiently, whose sizes can be factorized in a product of small prime numbers (2, 3, and 5 in the /// current implementation). Such an efficient DFT size can be calculated using the getOptimalDFTSize /// method. /// /// The sample below illustrates how to calculate a DFT-based convolution of two 2D real arrays: /// ```ignore /// void convolveDFT(InputArray A, InputArray B, OutputArray C) /// { /// // reallocate the output array if needed /// C.create(abs(A.rows - B.rows)+1, abs(A.cols - B.cols)+1, A.type()); /// Size dftSize; /// // calculate the size of DFT transform /// dftSize.width = getOptimalDFTSize(A.cols + B.cols - 1); /// dftSize.height = getOptimalDFTSize(A.rows + B.rows - 1); /// /// // allocate temporary buffers and initialize them with 0's /// Mat tempA(dftSize, A.type(), Scalar::all(0)); /// Mat tempB(dftSize, B.type(), Scalar::all(0)); /// /// // copy A and B to the top-left corners of tempA and tempB, respectively /// Mat roiA(tempA, Rect(0,0,A.cols,A.rows)); /// A.copyTo(roiA); /// Mat roiB(tempB, Rect(0,0,B.cols,B.rows)); /// B.copyTo(roiB); /// /// // now transform the padded A & B in-place; /// // use "nonzeroRows" hint for faster processing /// dft(tempA, tempA, 0, A.rows); /// dft(tempB, tempB, 0, B.rows); /// /// // multiply the spectrums; /// // the function handles packed spectrum representations well /// mulSpectrums(tempA, tempB, tempA); /// /// // transform the product back from the frequency domain. /// // Even though all the result rows will be non-zero, /// // you need only the first C.rows of them, and thus you /// // pass nonzeroRows == C.rows /// dft(tempA, tempA, DFT_INVERSE + DFT_SCALE, C.rows); /// /// // now copy the result back to C. /// tempA(Rect(0, 0, C.cols, C.rows)).copyTo(C); /// /// // all the temporary buffers will be deallocated automatically /// } /// ``` /// /// To optimize this sample, consider the following approaches: /// * Since nonzeroRows != 0 is passed to the forward transform calls and since A and B are copied to /// the top-left corners of tempA and tempB, respectively, it is not necessary to clear the whole /// tempA and tempB. It is only necessary to clear the tempA.cols - A.cols ( tempB.cols - B.cols) /// rightmost columns of the matrices. /// * This DFT-based convolution does not have to be applied to the whole big arrays, especially if B /// is significantly smaller than A or vice versa. Instead, you can calculate convolution by parts. /// To do this, you need to split the output array C into multiple tiles. For each tile, estimate /// which parts of A and B are required to calculate convolution in this tile. If the tiles in C are /// too small, the speed will decrease a lot because of repeated work. In the ultimate case, when /// each tile in C is a single pixel, the algorithm becomes equivalent to the naive convolution /// algorithm. If the tiles are too big, the temporary arrays tempA and tempB become too big and /// there is also a slowdown because of bad cache locality. So, there is an optimal tile size /// somewhere in the middle. /// * If different tiles in C can be calculated in parallel and, thus, the convolution is done by /// parts, the loop can be threaded. /// /// All of the above improvements have been implemented in #matchTemplate and #filter2D . Therefore, by /// using them, you can get the performance even better than with the above theoretically optimal /// implementation. Though, those two functions actually calculate cross-correlation, not convolution, /// so you need to "flip" the second convolution operand B vertically and horizontally using flip . /// /// Note: /// * An example using the discrete fourier transform can be found at /// opencv_source_code/samples/cpp/dft.cpp /// * (Python) An example using the dft functionality to perform Wiener deconvolution can be found /// at opencv_source/samples/python/deconvolution.py /// * (Python) An example rearranging the quadrants of a Fourier image can be found at /// opencv_source/samples/python/dft.py /// ## Parameters /// * src: input array that could be real or complex. /// * dst: output array whose size and type depends on the flags . /// * flags: transformation flags, representing a combination of the #DftFlags /// * nonzeroRows: when the parameter is not zero, the function assumes that only the first /// nonzeroRows rows of the input array (#DFT_INVERSE is not set) or only the first nonzeroRows of the /// output array (#DFT_INVERSE is set) contain non-zeros, thus, the function can handle the rest of the /// rows more efficiently and save some time; this technique is very useful for calculating array /// cross-correlation or convolution using DFT. /// ## See also /// dct , getOptimalDFTSize , mulSpectrums, filter2D , matchTemplate , flip , cartToPolar , /// magnitude , phase /// /// ## C++ default parameters /// * flags: 0 /// * nonzero_rows: 0 pub fn dft(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, flags: i32, nonzero_rows: i32) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_dft__InputArray__OutputArray_int_int(src.as_raw__InputArray(), dst.as_raw__OutputArray(), flags, nonzero_rows) }.into_result() } /// Get OpenCV type from DirectX type /// ## Parameters /// * iD3DFORMAT: - enum D3DTYPE for D3D9 /// ## Returns /// OpenCV type or -1 if there is no equivalent pub fn get_type_from_d3d_format(i_d3_dformat: i32) -> Result<i32> { unsafe { sys::cv_directx_getTypeFromD3DFORMAT_int(i_d3_dformat) }.into_result() } /// Get OpenCV type from DirectX type /// ## Parameters /// * iDXGI_FORMAT: - enum DXGI_FORMAT for D3D10/D3D11 /// ## Returns /// OpenCV type or -1 if there is no equivalent pub fn get_type_from_dxgi_format(i_dxgi_format: i32) -> Result<i32> { unsafe { sys::cv_directx_getTypeFromDXGI_FORMAT_int(i_dxgi_format) }.into_result() } /// Integer division with result round up. /// /// Use this function instead of `ceil((float)a / b)` expressions. /// /// ## See also /// alignSize pub fn div_up(a: i32, b: u32) -> Result<i32> { unsafe { sys::cv_divUp_int_unsigned_int(a, b) }.into_result() } /// Integer division with result round up. /// /// Use this function instead of `ceil((float)a / b)` expressions. /// /// ## See also /// alignSize /// /// ## Overloaded parameters pub fn duv_up_u(a: size_t, b: u32) -> Result<size_t> { unsafe { sys::cv_divUp_size_t_unsigned_int(a, b) }.into_result() } /// Performs per-element division of two arrays or a scalar by an array. /// /// The function cv::divide divides one array by another: ///  /// or a scalar by an array when there is no src1 : ///  /// /// When src2(I) is zero, dst(I) will also be zero. Different channels of /// multi-channel arrays are processed independently. /// /// /// Note: Saturation is not applied when the output array has the depth CV_32S. You may even get /// result of an incorrect sign in the case of overflow. /// ## Parameters /// * src1: first input array. /// * src2: second input array of the same size and type as src1. /// * scale: scalar factor. /// * dst: output array of the same size and type as src2. /// * dtype: optional depth of the output array; if -1, dst will have depth src2.depth(), but in /// case of an array-by-array division, you can only pass -1 when src1.depth()==src2.depth(). /// ## See also /// multiply, add, subtract /// /// ## C++ default parameters /// * scale: 1 /// * dtype: -1 pub fn divide2(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, scale: f64, dtype: i32) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); unsafe { sys::cv_divide__InputArray__InputArray__OutputArray_double_int(src1.as_raw__InputArray(), src2.as_raw__InputArray(), dst.as_raw__OutputArray(), scale, dtype) }.into_result() } /// Performs per-element division of two arrays or a scalar by an array. /// /// The function cv::divide divides one array by another: ///  /// or a scalar by an array when there is no src1 : ///  /// /// When src2(I) is zero, dst(I) will also be zero. Different channels of /// multi-channel arrays are processed independently. /// /// /// Note: Saturation is not applied when the output array has the depth CV_32S. You may even get /// result of an incorrect sign in the case of overflow. /// ## Parameters /// * src1: first input array. /// * src2: second input array of the same size and type as src1. /// * scale: scalar factor. /// * dst: output array of the same size and type as src2. /// * dtype: optional depth of the output array; if -1, dst will have depth src2.depth(), but in /// case of an array-by-array division, you can only pass -1 when src1.depth()==src2.depth(). /// ## See also /// multiply, add, subtract /// /// ## Overloaded parameters /// /// ## C++ default parameters /// * dtype: -1 pub fn divide(scale: f64, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, dtype: i32) -> Result<()> { input_array_arg!(src2); output_array_arg!(dst); unsafe { sys::cv_divide_double__InputArray__OutputArray_int(scale, src2.as_raw__InputArray(), dst.as_raw__OutputArray(), dtype) }.into_result() } /// Calculates eigenvalues and eigenvectors of a non-symmetric matrix (real eigenvalues only). /// /// /// Note: Assumes real eigenvalues. /// /// The function calculates eigenvalues and eigenvectors (optional) of the square matrix src: /// ```ignore /// src*eigenvectors.row(i).t() = eigenvalues.at<srcType>(i)*eigenvectors.row(i).t() /// ``` /// /// /// ## Parameters /// * src: input matrix (CV_32FC1 or CV_64FC1 type). /// * eigenvalues: output vector of eigenvalues (type is the same type as src). /// * eigenvectors: output matrix of eigenvectors (type is the same type as src). The eigenvectors are stored as subsequent matrix rows, in the same order as the corresponding eigenvalues. /// ## See also /// eigen pub fn eigen_non_symmetric(src: &dyn core::ToInputArray, eigenvalues: &mut dyn core::ToOutputArray, eigenvectors: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src); output_array_arg!(eigenvalues); output_array_arg!(eigenvectors); unsafe { sys::cv_eigenNonSymmetric__InputArray__OutputArray__OutputArray(src.as_raw__InputArray(), eigenvalues.as_raw__OutputArray(), eigenvectors.as_raw__OutputArray()) }.into_result() } /// Calculates eigenvalues and eigenvectors of a symmetric matrix. /// /// The function cv::eigen calculates just eigenvalues, or eigenvalues and eigenvectors of the symmetric /// matrix src: /// ```ignore /// src*eigenvectors.row(i).t() = eigenvalues.at<srcType>(i)*eigenvectors.row(i).t() /// ``` /// /// /// /// Note: Use cv::eigenNonSymmetric for calculation of real eigenvalues and eigenvectors of non-symmetric matrix. /// /// ## Parameters /// * src: input matrix that must have CV_32FC1 or CV_64FC1 type, square size and be symmetrical /// (src ^T^ == src). /// * eigenvalues: output vector of eigenvalues of the same type as src; the eigenvalues are stored /// in the descending order. /// * eigenvectors: output matrix of eigenvectors; it has the same size and type as src; the /// eigenvectors are stored as subsequent matrix rows, in the same order as the corresponding /// eigenvalues. /// ## See also /// eigenNonSymmetric, completeSymm , PCA /// /// ## C++ default parameters /// * eigenvectors: noArray() pub fn eigen(src: &dyn core::ToInputArray, eigenvalues: &mut dyn core::ToOutputArray, eigenvectors: &mut dyn core::ToOutputArray) -> Result<bool> { input_array_arg!(src); output_array_arg!(eigenvalues); output_array_arg!(eigenvectors); unsafe { sys::cv_eigen__InputArray__OutputArray__OutputArray(src.as_raw__InputArray(), eigenvalues.as_raw__OutputArray(), eigenvectors.as_raw__OutputArray()) }.into_result() } /// same as cv::error, but does not return pub fn error_no_return(_code: i32, _err: &str, _func: &str, _file: &str, _line: i32) -> Result<()> { string_arg!(_err); string_arg!(_func); string_arg!(_file); unsafe { sys::cv_errorNoReturn_int_String_const_char_X_const_char_X_int(_code, _err.as_ptr(), _func.as_ptr(), _file.as_ptr(), _line) }.into_result() } pub fn error(_code: i32, _err: &str, _func: &str, _file: &str, _line: i32) -> Result<()> { string_arg!(_err); string_arg!(_func); string_arg!(_file); unsafe { sys::cv_error_int_String_const_char_X_const_char_X_int(_code, _err.as_ptr(), _func.as_ptr(), _file.as_ptr(), _line) }.into_result() } /// Calculates the exponent of every array element. /// /// The function cv::exp calculates the exponent of every element of the input /// array: ///  /// /// The maximum relative error is about 7e-6 for single-precision input and /// less than 1e-10 for double-precision input. Currently, the function /// converts denormalized values to zeros on output. Special values (NaN, /// Inf) are not handled. /// ## Parameters /// * src: input array. /// * dst: output array of the same size and type as src. /// ## See also /// log , cartToPolar , polarToCart , phase , pow , sqrt , magnitude pub fn exp(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_exp__InputArray__OutputArray(src.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } /// Extracts a single channel from src (coi is 0-based index) /// ## Parameters /// * src: input array /// * dst: output array /// * coi: index of channel to extract /// ## See also /// mixChannels, split pub fn extract_channel(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, coi: i32) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_extractChannel__InputArray__OutputArray_int(src.as_raw__InputArray(), dst.as_raw__OutputArray(), coi) }.into_result() } /// Calculates the angle of a 2D vector in degrees. /// /// The function fastAtan2 calculates the full-range angle of an input 2D vector. The angle is measured /// in degrees and varies from 0 to 360 degrees. The accuracy is about 0.3 degrees. /// ## Parameters /// * x: x-coordinate of the vector. /// * y: y-coordinate of the vector. pub fn fast_atan2(y: f32, x: f32) -> Result<f32> { unsafe { sys::cv_fastAtan2_float_float(y, x) }.into_result() } /// Returns the list of locations of non-zero pixels /// /// Given a binary matrix (likely returned from an operation such /// as threshold(), compare(), >, ==, etc, return all of /// the non-zero indices as a cv::Mat or std::vector<cv::Point> (x,y) /// For example: /// ```ignore{.cpp} /// cv::Mat binaryImage; // input, binary image /// cv::Mat locations; // output, locations of non-zero pixels /// cv::findNonZero(binaryImage, locations); /// /// // access pixel coordinates /// Point pnt = locations.at<Point>(i); /// ``` /// /// or /// ```ignore{.cpp} /// cv::Mat binaryImage; // input, binary image /// vector<Point> locations; // output, locations of non-zero pixels /// cv::findNonZero(binaryImage, locations); /// /// // access pixel coordinates /// Point pnt = locations[i]; /// ``` /// /// ## Parameters /// * src: single-channel array (type CV_8UC1) /// * idx: the output array, type of cv::Mat or std::vector<Point>, corresponding to non-zero indices in the input pub fn find_non_zero(src: &dyn core::ToInputArray, idx: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src); output_array_arg!(idx); unsafe { sys::cv_findNonZero__InputArray__OutputArray(src.as_raw__InputArray(), idx.as_raw__OutputArray()) }.into_result() } /// Flips a 2D array around vertical, horizontal, or both axes. /// /// The function cv::flip flips the array in one of three different ways (row /// and column indices are 0-based): ///  /// The example scenarios of using the function are the following: /// Vertical flipping of the image (flipCode == 0) to switch between /// top-left and bottom-left image origin. This is a typical operation /// in video processing on Microsoft Windows\* OS. /// Horizontal flipping of the image with the subsequent horizontal /// shift and absolute difference calculation to check for a /// vertical-axis symmetry (flipCode \> 0). /// Simultaneous horizontal and vertical flipping of the image with /// the subsequent shift and absolute difference calculation to check /// for a central symmetry (flipCode \< 0). /// Reversing the order of point arrays (flipCode \> 0 or /// flipCode == 0). /// ## Parameters /// * src: input array. /// * dst: output array of the same size and type as src. /// * flipCode: a flag to specify how to flip the array; 0 means /// flipping around the x-axis and positive value (for example, 1) means /// flipping around y-axis. Negative value (for example, -1) means flipping /// around both axes. /// ## See also /// transpose , repeat , completeSymm pub fn flip(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, flip_code: i32) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_flip__InputArray__OutputArray_int(src.as_raw__InputArray(), dst.as_raw__OutputArray(), flip_code) }.into_result() } /// Performs generalized matrix multiplication. /// /// The function cv::gemm performs generalized matrix multiplication similar to the /// gemm functions in BLAS level 3. For example, /// `gemm(src1, src2, alpha, src3, beta, dst, GEMM_1_T + GEMM_3_T)` /// corresponds to ///  /// /// In case of complex (two-channel) data, performed a complex matrix /// multiplication. /// /// The function can be replaced with a matrix expression. For example, the /// above call can be replaced with: /// ```ignore{.cpp} /// dst = alpha*src1.t()*src2 + beta*src3.t(); /// ``` /// /// ## Parameters /// * src1: first multiplied input matrix that could be real(CV_32FC1, /// CV_64FC1) or complex(CV_32FC2, CV_64FC2). /// * src2: second multiplied input matrix of the same type as src1. /// * alpha: weight of the matrix product. /// * src3: third optional delta matrix added to the matrix product; it /// should have the same type as src1 and src2. /// * beta: weight of src3. /// * dst: output matrix; it has the proper size and the same type as /// input matrices. /// * flags: operation flags (cv::GemmFlags) /// ## See also /// mulTransposed , transform /// /// ## C++ default parameters /// * flags: 0 pub fn gemm(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, alpha: f64, src3: &dyn core::ToInputArray, beta: f64, dst: &mut dyn core::ToOutputArray, flags: i32) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); input_array_arg!(src3); output_array_arg!(dst); unsafe { sys::cv_gemm__InputArray__InputArray_double__InputArray_double__OutputArray_int(src1.as_raw__InputArray(), src2.as_raw__InputArray(), alpha, src3.as_raw__InputArray(), beta, dst.as_raw__OutputArray(), flags) }.into_result() } /// Returns full configuration time cmake output. /// /// Returned value is raw cmake output including version control system revision, compiler version, /// compiler flags, enabled modules and third party libraries, etc. Output format depends on target /// architecture. pub fn get_build_information() -> Result<String> { unsafe { sys::cv_getBuildInformation() }.into_result().map(crate::templ::receive_string) } /// Returns list of CPU features enabled during compilation. /// /// Returned value is a string containing space separated list of CPU features with following markers: /// /// - no markers - baseline features /// - prefix `*` - features enabled in dispatcher /// - suffix `?` - features enabled but not available in HW /// /// Example: `SSE SSE2 SSE3 *SSE4.1 *SSE4.2 *FP16 *AVX *AVX2 *AVX512-SKX?` pub fn get_cpu_features_line() -> Result<String> { unsafe { sys::cv_getCPUFeaturesLine() }.into_result().map(crate::templ::receive_string_mut) } /// Returns the number of CPU ticks. /// /// The function returns the current number of CPU ticks on some architectures (such as x86, x64, /// PowerPC). On other platforms the function is equivalent to getTickCount. It can also be used for /// very accurate time measurements, as well as for RNG initialization. Note that in case of multi-CPU /// systems a thread, from which getCPUTickCount is called, can be suspended and resumed at another CPU /// with its own counter. So, theoretically (and practically) the subsequent calls to the function do /// not necessary return the monotonously increasing values. Also, since a modern CPU varies the CPU /// frequency depending on the load, the number of CPU clocks spent in some code cannot be directly /// converted to time units. Therefore, getTickCount is generally a preferable solution for measuring /// execution time. pub fn get_cpu_tick_count() -> Result<i64> { unsafe { sys::cv_getCPUTickCount() }.into_result() } pub fn get_elem_size(_type: i32) -> Result<size_t> { unsafe { sys::cv_getElemSize_int(_type) }.into_result() } /// Returns feature name by ID /// /// Returns empty string if feature is not defined pub fn get_hardware_feature_name(feature: i32) -> Result<String> { unsafe { sys::cv_getHardwareFeatureName_int(feature) }.into_result().map(crate::templ::receive_string_mut) } /// Returns the number of threads used by OpenCV for parallel regions. /// /// Always returns 1 if OpenCV is built without threading support. /// /// The exact meaning of return value depends on the threading framework used by OpenCV library: /// - `TBB` - The number of threads, that OpenCV will try to use for parallel regions. If there is /// any tbb::thread_scheduler_init in user code conflicting with OpenCV, then function returns /// default number of threads used by TBB library. /// - `OpenMP` - An upper bound on the number of threads that could be used to form a new team. /// - `Concurrency` - The number of threads, that OpenCV will try to use for parallel regions. /// - `GCD` - Unsupported; returns the GCD thread pool limit (512) for compatibility. /// - `C=` - The number of threads, that OpenCV will try to use for parallel regions, if before /// called setNumThreads with threads \> 0, otherwise returns the number of logical CPUs, /// available for the process. /// ## See also /// setNumThreads, getThreadNum pub fn get_num_threads() -> Result<i32> { unsafe { sys::cv_getNumThreads() }.into_result() } /// Returns the number of logical CPUs available for the process. pub fn get_number_of_cpus() -> Result<i32> { unsafe { sys::cv_getNumberOfCPUs() }.into_result() } /// Returns the optimal DFT size for a given vector size. /// /// DFT performance is not a monotonic function of a vector size. Therefore, when you calculate /// convolution of two arrays or perform the spectral analysis of an array, it usually makes sense to /// pad the input data with zeros to get a bit larger array that can be transformed much faster than the /// original one. Arrays whose size is a power-of-two (2, 4, 8, 16, 32, ...) are the fastest to process. /// Though, the arrays whose size is a product of 2's, 3's, and 5's (for example, 300 = 5\*5\*3\*2\*2) /// are also processed quite efficiently. /// /// The function cv::getOptimalDFTSize returns the minimum number N that is greater than or equal to vecsize /// so that the DFT of a vector of size N can be processed efficiently. In the current implementation N /// = 2 ^p^ \* 3 ^q^ \* 5 ^r^ for some integer p, q, r. /// /// The function returns a negative number if vecsize is too large (very close to INT_MAX ). /// /// While the function cannot be used directly to estimate the optimal vector size for DCT transform /// (since the current DCT implementation supports only even-size vectors), it can be easily processed /// as getOptimalDFTSize((vecsize+1)/2)\*2. /// ## Parameters /// * vecsize: vector size. /// ## See also /// dft , dct , idft , idct , mulSpectrums pub fn get_optimal_dft_size(vecsize: i32) -> Result<i32> { unsafe { sys::cv_getOptimalDFTSize_int(vecsize) }.into_result() } /// Returns the index of the currently executed thread within the current parallel region. Always /// returns 0 if called outside of parallel region. /// /// **Deprecated**: Current implementation doesn't corresponding to this documentation. /// /// /// The exact meaning of the return value depends on the threading framework used by OpenCV library: /// - `TBB` - Unsupported with current 4.1 TBB release. Maybe will be supported in future. /// - `OpenMP` - The thread number, within the current team, of the calling thread. /// - `Concurrency` - An ID for the virtual processor that the current context is executing on (0 /// for master thread and unique number for others, but not necessary 1,2,3,...). /// - `GCD` - System calling thread's ID. Never returns 0 inside parallel region. /// - `C=` - The index of the current parallel task. /// ## See also /// setNumThreads, getNumThreads #[deprecated = "Current implementation doesn't corresponding to this documentation."] pub fn get_thread_num() -> Result<i32> { unsafe { sys::cv_getThreadNum() }.into_result() } /// Returns the number of ticks. /// /// The function returns the number of ticks after the certain event (for example, when the machine was /// turned on). It can be used to initialize RNG or to measure a function execution time by reading the /// tick count before and after the function call. /// ## See also /// getTickFrequency, TickMeter pub fn get_tick_count() -> Result<i64> { unsafe { sys::cv_getTickCount() }.into_result() } /// Returns the number of ticks per second. /// /// The function returns the number of ticks per second. That is, the following code computes the /// execution time in seconds: /// ```ignore /// double t = (double)getTickCount(); /// // do something ... /// t = ((double)getTickCount() - t)/getTickFrequency(); /// ``` /// /// ## See also /// getTickCount, TickMeter pub fn get_tick_frequency() -> Result<f64> { unsafe { sys::cv_getTickFrequency() }.into_result() } /// Returns major library version pub fn get_version_major() -> Result<i32> { unsafe { sys::cv_getVersionMajor() }.into_result() } /// Returns minor library version pub fn get_version_minor() -> Result<i32> { unsafe { sys::cv_getVersionMinor() }.into_result() } /// Returns revision field of the library version pub fn get_version_revision() -> Result<i32> { unsafe { sys::cv_getVersionRevision() }.into_result() } /// Returns library version string /// /// For example "3.4.1-dev". /// /// ## See also /// getMajorVersion, getMinorVersion, getRevisionVersion pub fn get_version_string() -> Result<String> { unsafe { sys::cv_getVersionString() }.into_result().map(crate::templ::receive_string_mut) } /// /// ## C++ default parameters /// * recursive: false pub fn glob(pattern: &str, result: &mut types::VectorOfString, recursive: bool) -> Result<()> { string_arg!(mut pattern); unsafe { sys::cv_glob_String_VectorOfString_bool(pattern.as_ptr() as _, result.as_raw_VectorOfString(), recursive) }.into_result() } pub fn have_openvx() -> Result<bool> { unsafe { sys::cv_haveOpenVX() }.into_result() } /// Applies horizontal concatenation to given matrices. /// /// The function horizontally concatenates two or more cv::Mat matrices (with the same number of rows). /// ```ignore{.cpp} /// cv::Mat matArray[] = { cv::Mat(4, 1, CV_8UC1, cv::Scalar(1)), /// cv::Mat(4, 1, CV_8UC1, cv::Scalar(2)), /// cv::Mat(4, 1, CV_8UC1, cv::Scalar(3)),}; /// /// cv::Mat out; /// cv::hconcat( matArray, 3, out ); /// //out: /// //[1, 2, 3; /// // 1, 2, 3; /// // 1, 2, 3; /// // 1, 2, 3] /// ``` /// /// ## Parameters /// * src: input array or vector of matrices. all of the matrices must have the same number of rows and the same depth. /// * nsrc: number of matrices in src. /// * dst: output array. It has the same number of rows and depth as the src, and the sum of cols of the src. /// ## See also /// cv::vconcat(const Mat*, size_t, OutputArray), cv::vconcat(InputArrayOfArrays, OutputArray) and cv::vconcat(InputArray, InputArray, OutputArray) /// /// ## Overloaded parameters /// /// ```ignore{.cpp} /// cv::Mat_<float> A = (cv::Mat_<float>(3, 2) << 1, 4, /// 2, 5, /// 3, 6); /// cv::Mat_<float> B = (cv::Mat_<float>(3, 2) << 7, 10, /// 8, 11, /// 9, 12); /// /// cv::Mat C; /// cv::hconcat(A, B, C); /// //C: /// //[1, 4, 7, 10; /// // 2, 5, 8, 11; /// // 3, 6, 9, 12] /// ``` /// /// * src1: first input array to be considered for horizontal concatenation. /// * src2: second input array to be considered for horizontal concatenation. /// * dst: output array. It has the same number of rows and depth as the src1 and src2, and the sum of cols of the src1 and src2. pub fn hconcat2(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); unsafe { sys::cv_hconcat__InputArray__InputArray__OutputArray(src1.as_raw__InputArray(), src2.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } /// Applies horizontal concatenation to given matrices. /// /// The function horizontally concatenates two or more cv::Mat matrices (with the same number of rows). /// ```ignore{.cpp} /// cv::Mat matArray[] = { cv::Mat(4, 1, CV_8UC1, cv::Scalar(1)), /// cv::Mat(4, 1, CV_8UC1, cv::Scalar(2)), /// cv::Mat(4, 1, CV_8UC1, cv::Scalar(3)),}; /// /// cv::Mat out; /// cv::hconcat( matArray, 3, out ); /// //out: /// //[1, 2, 3; /// // 1, 2, 3; /// // 1, 2, 3; /// // 1, 2, 3] /// ``` /// /// ## Parameters /// * src: input array or vector of matrices. all of the matrices must have the same number of rows and the same depth. /// * nsrc: number of matrices in src. /// * dst: output array. It has the same number of rows and depth as the src, and the sum of cols of the src. /// ## See also /// cv::vconcat(const Mat*, size_t, OutputArray), cv::vconcat(InputArrayOfArrays, OutputArray) and cv::vconcat(InputArray, InputArray, OutputArray) /// /// ## Overloaded parameters /// /// ```ignore{.cpp} /// std::vector<cv::Mat> matrices = { cv::Mat(4, 1, CV_8UC1, cv::Scalar(1)), /// cv::Mat(4, 1, CV_8UC1, cv::Scalar(2)), /// cv::Mat(4, 1, CV_8UC1, cv::Scalar(3)),}; /// /// cv::Mat out; /// cv::hconcat( matrices, out ); /// //out: /// //[1, 2, 3; /// // 1, 2, 3; /// // 1, 2, 3; /// // 1, 2, 3] /// ``` /// /// * src: input array or vector of matrices. all of the matrices must have the same number of rows and the same depth. /// * dst: output array. It has the same number of rows and depth as the src, and the sum of cols of the src. /// same depth. pub fn hconcat(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_hconcat__InputArray__OutputArray(src.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } /// Calculates the inverse Discrete Cosine Transform of a 1D or 2D array. /// /// idct(src, dst, flags) is equivalent to dct(src, dst, flags | DCT_INVERSE). /// ## Parameters /// * src: input floating-point single-channel array. /// * dst: output array of the same size and type as src. /// * flags: operation flags. /// ## See also /// dct, dft, idft, getOptimalDFTSize /// /// ## C++ default parameters /// * flags: 0 pub fn idct(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, flags: i32) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_idct__InputArray__OutputArray_int(src.as_raw__InputArray(), dst.as_raw__OutputArray(), flags) }.into_result() } /// Calculates the inverse Discrete Fourier Transform of a 1D or 2D array. /// /// idft(src, dst, flags) is equivalent to dft(src, dst, flags | #DFT_INVERSE) . /// /// Note: None of dft and idft scales the result by default. So, you should pass #DFT_SCALE to one of /// dft or idft explicitly to make these transforms mutually inverse. /// ## See also /// dft, dct, idct, mulSpectrums, getOptimalDFTSize /// ## Parameters /// * src: input floating-point real or complex array. /// * dst: output array whose size and type depend on the flags. /// * flags: operation flags (see dft and #DftFlags). /// * nonzeroRows: number of dst rows to process; the rest of the rows have undefined content (see /// the convolution sample in dft description. /// /// ## C++ default parameters /// * flags: 0 /// * nonzero_rows: 0 pub fn idft(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, flags: i32, nonzero_rows: i32) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_idft__InputArray__OutputArray_int_int(src.as_raw__InputArray(), dst.as_raw__OutputArray(), flags, nonzero_rows) }.into_result() } /// Checks if array elements lie between the elements of two other arrays. /// /// The function checks the range as follows: /// * For every element of a single-channel input array: ///  /// * For two-channel arrays: ///  /// * and so forth. /// /// That is, dst (I) is set to 255 (all 1 -bits) if src (I) is within the /// specified 1D, 2D, 3D, ... box and 0 otherwise. /// /// When the lower and/or upper boundary parameters are scalars, the indexes /// (I) at lowerb and upperb in the above formulas should be omitted. /// ## Parameters /// * src: first input array. /// * lowerb: inclusive lower boundary array or a scalar. /// * upperb: inclusive upper boundary array or a scalar. /// * dst: output array of the same size as src and CV_8U type. pub fn in_range(src: &dyn core::ToInputArray, lowerb: &dyn core::ToInputArray, upperb: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src); input_array_arg!(lowerb); input_array_arg!(upperb); output_array_arg!(dst); unsafe { sys::cv_inRange__InputArray__InputArray__InputArray__OutputArray(src.as_raw__InputArray(), lowerb.as_raw__InputArray(), upperb.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } /// Inserts a single channel to dst (coi is 0-based index) /// ## Parameters /// * src: input array /// * dst: output array /// * coi: index of channel for insertion /// ## See also /// mixChannels, merge pub fn insert_channel(src: &dyn core::ToInputArray, dst: &mut dyn core::ToInputOutputArray, coi: i32) -> Result<()> { input_array_arg!(src); input_output_array_arg!(dst); unsafe { sys::cv_insertChannel__InputArray__InputOutputArray_int(src.as_raw__InputArray(), dst.as_raw__InputOutputArray(), coi) }.into_result() } pub fn get_flags() -> Result<core::FLAGS> { unsafe { sys::cv_instr_getFlags() }.into_result() } pub fn reset_trace() -> Result<()> { unsafe { sys::cv_instr_resetTrace() }.into_result() } pub fn set_flags(mode_flags: core::FLAGS) -> Result<()> { unsafe { sys::cv_instr_setFlags_FLAGS(mode_flags) }.into_result() } pub fn set_flags_1(mode_flags: i32) -> Result<()> { unsafe { sys::cv_instr_setFlags_int(mode_flags) }.into_result() } pub fn set_use_instrumentation(flag: bool) -> Result<()> { unsafe { sys::cv_instr_setUseInstrumentation_bool(flag) }.into_result() } pub fn use_instrumentation() -> Result<bool> { unsafe { sys::cv_instr_useInstrumentation() }.into_result() } /// Finds the inverse or pseudo-inverse of a matrix. /// /// The function cv::invert inverts the matrix src and stores the result in dst /// . When the matrix src is singular or non-square, the function calculates /// the pseudo-inverse matrix (the dst matrix) so that norm(src\*dst - I) is /// minimal, where I is an identity matrix. /// /// In case of the #DECOMP_LU method, the function returns non-zero value if /// the inverse has been successfully calculated and 0 if src is singular. /// /// In case of the #DECOMP_SVD method, the function returns the inverse /// condition number of src (the ratio of the smallest singular value to the /// largest singular value) and 0 if src is singular. The SVD method /// calculates a pseudo-inverse matrix if src is singular. /// /// Similarly to #DECOMP_LU, the method #DECOMP_CHOLESKY works only with /// non-singular square matrices that should also be symmetrical and /// positively defined. In this case, the function stores the inverted /// matrix in dst and returns non-zero. Otherwise, it returns 0. /// /// ## Parameters /// * src: input floating-point M x N matrix. /// * dst: output matrix of N x M size and the same type as src. /// * flags: inversion method (cv::DecompTypes) /// ## See also /// solve, SVD /// /// ## C++ default parameters /// * flags: DECOMP_LU pub fn invert(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, flags: i32) -> Result<f64> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_invert__InputArray__OutputArray_int(src.as_raw__InputArray(), dst.as_raw__OutputArray(), flags) }.into_result() } pub fn get_ipp_error_location() -> Result<String> { unsafe { sys::cv_ipp_getIppErrorLocation() }.into_result().map(crate::templ::receive_string_mut) } pub fn get_ipp_features() -> Result<u64> { unsafe { sys::cv_ipp_getIppFeatures() }.into_result() } pub fn get_ipp_status() -> Result<i32> { unsafe { sys::cv_ipp_getIppStatus() }.into_result() } pub fn get_ipp_version() -> Result<String> { unsafe { sys::cv_ipp_getIppVersion() }.into_result().map(crate::templ::receive_string_mut) } pub fn set_use_ipp_ne(flag: bool) -> Result<()> { unsafe { sys::cv_ipp_setUseIPP_NE_bool(flag) }.into_result() } pub fn set_use_ipp_not_exact(flag: bool) -> Result<()> { unsafe { sys::cv_ipp_setUseIPP_NotExact_bool(flag) }.into_result() } pub fn set_use_ipp(flag: bool) -> Result<()> { unsafe { sys::cv_ipp_setUseIPP_bool(flag) }.into_result() } pub fn use_ipp() -> Result<bool> { unsafe { sys::cv_ipp_useIPP() }.into_result() } pub fn use_ipp_ne() -> Result<bool> { unsafe { sys::cv_ipp_useIPP_NE() }.into_result() } pub fn use_ipp_not_exact() -> Result<bool> { unsafe { sys::cv_ipp_useIPP_NotExact() }.into_result() } /// Finds centers of clusters and groups input samples around the clusters. /// /// The function kmeans implements a k-means algorithm that finds the centers of cluster_count clusters /// and groups the input samples around the clusters. As an output,  contains a /// 0-based cluster index for the sample stored in the  row of the samples matrix. /// /// /// Note: /// * (Python) An example on K-means clustering can be found at /// opencv_source_code/samples/python/kmeans.py /// ## Parameters /// * data: Data for clustering. An array of N-Dimensional points with float coordinates is needed. /// Examples of this array can be: /// * Mat points(count, 2, CV_32F); /// * Mat points(count, 1, CV_32FC2); /// * Mat points(1, count, CV_32FC2); /// * std::vector\<cv::Point2f\> points(sampleCount); /// * K: Number of clusters to split the set by. /// * bestLabels: Input/output integer array that stores the cluster indices for every sample. /// * criteria: The algorithm termination criteria, that is, the maximum number of iterations and/or /// the desired accuracy. The accuracy is specified as criteria.epsilon. As soon as each of the cluster /// centers moves by less than criteria.epsilon on some iteration, the algorithm stops. /// * attempts: Flag to specify the number of times the algorithm is executed using different /// initial labellings. The algorithm returns the labels that yield the best compactness (see the last /// function parameter). /// * flags: Flag that can take values of cv::KmeansFlags /// * centers: Output matrix of the cluster centers, one row per each cluster center. /// ## Returns /// The function returns the compactness measure that is computed as ///  /// after every attempt. The best (minimum) value is chosen and the corresponding labels and the /// compactness value are returned by the function. Basically, you can use only the core of the /// function, set the number of attempts to 1, initialize labels each time using a custom algorithm, /// pass them with the ( flags = #KMEANS_USE_INITIAL_LABELS ) flag, and then choose the best /// (most-compact) clustering. /// /// ## C++ default parameters /// * centers: noArray() pub fn kmeans(data: &dyn core::ToInputArray, k: i32, best_labels: &mut dyn core::ToInputOutputArray, criteria: &core::TermCriteria, attempts: i32, flags: i32, centers: &mut dyn core::ToOutputArray) -> Result<f64> { input_array_arg!(data); input_output_array_arg!(best_labels); output_array_arg!(centers); unsafe { sys::cv_kmeans__InputArray_int__InputOutputArray_TermCriteria_int_int__OutputArray(data.as_raw__InputArray(), k, best_labels.as_raw__InputOutputArray(), criteria.as_raw_TermCriteria(), attempts, flags, centers.as_raw__OutputArray()) }.into_result() } /// Calculates the natural logarithm of every array element. /// /// The function cv::log calculates the natural logarithm of every element of the input array: ///  /// /// Output on zero, negative and special (NaN, Inf) values is undefined. /// /// ## Parameters /// * src: input array. /// * dst: output array of the same size and type as src . /// ## See also /// exp, cartToPolar, polarToCart, phase, pow, sqrt, magnitude pub fn log(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_log__InputArray__OutputArray(src.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } /// Calculates the magnitude of 2D vectors. /// /// The function cv::magnitude calculates the magnitude of 2D vectors formed /// from the corresponding elements of x and y arrays: ///  /// ## Parameters /// * x: floating-point array of x-coordinates of the vectors. /// * y: floating-point array of y-coordinates of the vectors; it must /// have the same size as x. /// * magnitude: output array of the same size and type as x. /// ## See also /// cartToPolar, polarToCart, phase, sqrt pub fn magnitude(x: &dyn core::ToInputArray, y: &dyn core::ToInputArray, magnitude: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(x); input_array_arg!(y); output_array_arg!(magnitude); unsafe { sys::cv_magnitude__InputArray__InputArray__OutputArray(x.as_raw__InputArray(), y.as_raw__InputArray(), magnitude.as_raw__OutputArray()) }.into_result() } pub fn max_mat(a: &core::Mat, b: &core::Mat) -> Result<core::MatExpr> { unsafe { sys::cv_max_Mat_Mat(a.as_raw_Mat(), b.as_raw_Mat()) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// Calculates per-element maximum of two arrays or an array and a scalar. /// /// The function cv::max calculates the per-element maximum of two arrays: ///  /// or array and a scalar: ///  /// ## Parameters /// * src1: first input array. /// * src2: second input array of the same size and type as src1 . /// * dst: output array of the same size and type as src1. /// ## See also /// min, compare, inRange, minMaxLoc, @ref MatrixExpressions /// /// ## Overloaded parameters /// /// needed to avoid conflicts with const _Tp& std::min(const _Tp&, const _Tp&, _Compare) pub fn max_mat_to(src1: &core::Mat, src2: &core::Mat, dst: &mut core::Mat) -> Result<()> { unsafe { sys::cv_max_Mat_Mat_Mat(src1.as_raw_Mat(), src2.as_raw_Mat(), dst.as_raw_Mat()) }.into_result() } pub fn max_mat_f64(a: &core::Mat, s: f64) -> Result<core::MatExpr> { unsafe { sys::cv_max_Mat_double(a.as_raw_Mat(), s) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// Calculates per-element maximum of two arrays or an array and a scalar. /// /// The function cv::max calculates the per-element maximum of two arrays: ///  /// or array and a scalar: ///  /// ## Parameters /// * src1: first input array. /// * src2: second input array of the same size and type as src1 . /// * dst: output array of the same size and type as src1. /// ## See also /// min, compare, inRange, minMaxLoc, @ref MatrixExpressions /// /// ## Overloaded parameters /// /// needed to avoid conflicts with const _Tp& std::min(const _Tp&, const _Tp&, _Compare) pub fn max_umat_to(src1: &core::UMat, src2: &core::UMat, dst: &mut core::UMat) -> Result<()> { unsafe { sys::cv_max_UMat_UMat_UMat(src1.as_raw_UMat(), src2.as_raw_UMat(), dst.as_raw_UMat()) }.into_result() } /// Calculates per-element maximum of two arrays or an array and a scalar. /// /// The function cv::max calculates the per-element maximum of two arrays: ///  /// or array and a scalar: ///  /// ## Parameters /// * src1: first input array. /// * src2: second input array of the same size and type as src1 . /// * dst: output array of the same size and type as src1. /// ## See also /// min, compare, inRange, minMaxLoc, @ref MatrixExpressions pub fn max(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); unsafe { sys::cv_max__InputArray__InputArray__OutputArray(src1.as_raw__InputArray(), src2.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } pub fn max_f64_mat(s: f64, a: &core::Mat) -> Result<core::MatExpr> { unsafe { sys::cv_max_double_Mat(s, a.as_raw_Mat()) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// Calculates a mean and standard deviation of array elements. /// /// The function cv::meanStdDev calculates the mean and the standard deviation M /// of array elements independently for each channel and returns it via the /// output parameters: ///  /// When all the mask elements are 0's, the function returns /// mean=stddev=Scalar::all(0). /// /// Note: The calculated standard deviation is only the diagonal of the /// complete normalized covariance matrix. If the full matrix is needed, you /// can reshape the multi-channel array M x N to the single-channel array /// M\*N x mtx.channels() (only possible when the matrix is continuous) and /// then pass the matrix to calcCovarMatrix . /// ## Parameters /// * src: input array that should have from 1 to 4 channels so that the results can be stored in /// Scalar_ 's. /// * mean: output parameter: calculated mean value. /// * stddev: output parameter: calculated standard deviation. /// * mask: optional operation mask. /// ## See also /// countNonZero, mean, norm, minMaxLoc, calcCovarMatrix /// /// ## C++ default parameters /// * mask: noArray() pub fn mean_std_dev(src: &dyn core::ToInputArray, mean: &mut dyn core::ToOutputArray, stddev: &mut dyn core::ToOutputArray, mask: &dyn core::ToInputArray) -> Result<()> { input_array_arg!(src); output_array_arg!(mean); output_array_arg!(stddev); input_array_arg!(mask); unsafe { sys::cv_meanStdDev__InputArray__OutputArray__OutputArray__InputArray(src.as_raw__InputArray(), mean.as_raw__OutputArray(), stddev.as_raw__OutputArray(), mask.as_raw__InputArray()) }.into_result() } /// Calculates an average (mean) of array elements. /// /// The function cv::mean calculates the mean value M of array elements, /// independently for each channel, and return it: ///  /// When all the mask elements are 0's, the function returns Scalar::all(0) /// ## Parameters /// * src: input array that should have from 1 to 4 channels so that the result can be stored in /// Scalar_ . /// * mask: optional operation mask. /// ## See also /// countNonZero, meanStdDev, norm, minMaxLoc /// /// ## C++ default parameters /// * mask: noArray() pub fn mean(src: &dyn core::ToInputArray, mask: &dyn core::ToInputArray) -> Result<core::Scalar> { input_array_arg!(src); input_array_arg!(mask); unsafe { sys::cv_mean__InputArray__InputArray(src.as_raw__InputArray(), mask.as_raw__InputArray()) }.into_result() } /// Creates one multi-channel array out of several single-channel ones. /// /// The function cv::merge merges several arrays to make a single multi-channel array. That is, each /// element of the output array will be a concatenation of the elements of the input arrays, where /// elements of i-th input array are treated as mv[i].channels()-element vectors. /// /// The function cv::split does the reverse operation. If you need to shuffle channels in some other /// advanced way, use cv::mixChannels. /// /// The following example shows how to merge 3 single channel matrices into a single 3-channel matrix. /// @snippet snippets/core_merge.cpp example /// /// ## Parameters /// * mv: input array of matrices to be merged; all the matrices in mv must have the same /// size and the same depth. /// * count: number of input matrices when mv is a plain C array; it must be greater than zero. /// * dst: output array of the same size and the same depth as mv[0]; The number of channels will /// be equal to the parameter count. /// ## See also /// mixChannels, split, Mat::reshape /// /// ## Overloaded parameters /// /// * mv: input vector of matrices to be merged; all the matrices in mv must have the same /// size and the same depth. /// * dst: output array of the same size and the same depth as mv[0]; The number of channels will /// be the total number of channels in the matrix array. pub fn merge(mv: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(mv); output_array_arg!(dst); unsafe { sys::cv_merge__InputArray__OutputArray(mv.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } /// Finds the global minimum and maximum in an array /// /// The function cv::minMaxIdx finds the minimum and maximum element values and their positions. The /// extremums are searched across the whole array or, if mask is not an empty array, in the specified /// array region. The function does not work with multi-channel arrays. If you need to find minimum or /// maximum elements across all the channels, use Mat::reshape first to reinterpret the array as /// single-channel. Or you may extract the particular channel using either extractImageCOI , or /// mixChannels , or split . In case of a sparse matrix, the minimum is found among non-zero elements /// only. /// /// Note: When minIdx is not NULL, it must have at least 2 elements (as well as maxIdx), even if src is /// a single-row or single-column matrix. In OpenCV (following MATLAB) each array has at least 2 /// dimensions, i.e. single-column matrix is Mx1 matrix (and therefore minIdx/maxIdx will be /// (i1,0)/(i2,0)) and single-row matrix is 1xN matrix (and therefore minIdx/maxIdx will be /// (0,j1)/(0,j2)). /// ## Parameters /// * src: input single-channel array. /// * minVal: pointer to the returned minimum value; NULL is used if not required. /// * maxVal: pointer to the returned maximum value; NULL is used if not required. /// * minIdx: pointer to the returned minimum location (in nD case); NULL is used if not required; /// Otherwise, it must point to an array of src.dims elements, the coordinates of the minimum element /// in each dimension are stored there sequentially. /// * maxIdx: pointer to the returned maximum location (in nD case). NULL is used if not required. /// * mask: specified array region /// /// ## C++ default parameters /// * max_val: 0 /// * min_idx: 0 /// * max_idx: 0 /// * mask: noArray() pub fn min_max_idx(src: &dyn core::ToInputArray, min_val: &mut f64, max_val: &mut f64, min_idx: &mut i32, max_idx: &mut i32, mask: &dyn core::ToInputArray) -> Result<()> { input_array_arg!(src); input_array_arg!(mask); unsafe { sys::cv_minMaxIdx__InputArray_double_X_double_X_int_X_int_X__InputArray(src.as_raw__InputArray(), min_val, max_val, min_idx, max_idx, mask.as_raw__InputArray()) }.into_result() } /// Finds the global minimum and maximum in an array. /// /// The function cv::minMaxLoc finds the minimum and maximum element values and their positions. The /// extremums are searched across the whole array or, if mask is not an empty array, in the specified /// array region. /// /// The function do not work with multi-channel arrays. If you need to find minimum or maximum /// elements across all the channels, use Mat::reshape first to reinterpret the array as /// single-channel. Or you may extract the particular channel using either extractImageCOI , or /// mixChannels , or split . /// ## Parameters /// * src: input single-channel array. /// * minVal: pointer to the returned minimum value; NULL is used if not required. /// * maxVal: pointer to the returned maximum value; NULL is used if not required. /// * minLoc: pointer to the returned minimum location (in 2D case); NULL is used if not required. /// * maxLoc: pointer to the returned maximum location (in 2D case); NULL is used if not required. /// * mask: optional mask used to select a sub-array. /// ## See also /// max, min, compare, inRange, extractImageCOI, mixChannels, split, Mat::reshape /// /// ## Overloaded parameters /// /// * a: input single-channel array. /// * minVal: pointer to the returned minimum value; NULL is used if not required. /// * maxVal: pointer to the returned maximum value; NULL is used if not required. /// * minIdx: pointer to the returned minimum location (in nD case); NULL is used if not required; /// Otherwise, it must point to an array of src.dims elements, the coordinates of the minimum element /// in each dimension are stored there sequentially. /// * maxIdx: pointer to the returned maximum location (in nD case). NULL is used if not required. /// /// ## C++ default parameters /// * min_idx: 0 /// * max_idx: 0 pub fn min_max_loc_sparse(a: &core::SparseMat, min_val: &mut f64, max_val: &mut f64, min_idx: &mut i32, max_idx: &mut i32) -> Result<()> { unsafe { sys::cv_minMaxLoc_SparseMat_double_X_double_X_int_X_int_X(a.as_raw_SparseMat(), min_val, max_val, min_idx, max_idx) }.into_result() } /// Finds the global minimum and maximum in an array. /// /// The function cv::minMaxLoc finds the minimum and maximum element values and their positions. The /// extremums are searched across the whole array or, if mask is not an empty array, in the specified /// array region. /// /// The function do not work with multi-channel arrays. If you need to find minimum or maximum /// elements across all the channels, use Mat::reshape first to reinterpret the array as /// single-channel. Or you may extract the particular channel using either extractImageCOI , or /// mixChannels , or split . /// ## Parameters /// * src: input single-channel array. /// * minVal: pointer to the returned minimum value; NULL is used if not required. /// * maxVal: pointer to the returned maximum value; NULL is used if not required. /// * minLoc: pointer to the returned minimum location (in 2D case); NULL is used if not required. /// * maxLoc: pointer to the returned maximum location (in 2D case); NULL is used if not required. /// * mask: optional mask used to select a sub-array. /// ## See also /// max, min, compare, inRange, extractImageCOI, mixChannels, split, Mat::reshape /// /// ## C++ default parameters /// * max_val: 0 /// * min_loc: 0 /// * max_loc: 0 /// * mask: noArray() pub fn min_max_loc(src: &dyn core::ToInputArray, min_val: &mut f64, max_val: &mut f64, min_loc: &mut core::Point, max_loc: &mut core::Point, mask: &dyn core::ToInputArray) -> Result<()> { input_array_arg!(src); input_array_arg!(mask); unsafe { sys::cv_minMaxLoc__InputArray_double_X_double_X_Point_X_Point_X__InputArray(src.as_raw__InputArray(), min_val, max_val, min_loc, max_loc, mask.as_raw__InputArray()) }.into_result() } pub fn min_mat(a: &core::Mat, b: &core::Mat) -> Result<core::MatExpr> { unsafe { sys::cv_min_Mat_Mat(a.as_raw_Mat(), b.as_raw_Mat()) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// Calculates per-element minimum of two arrays or an array and a scalar. /// /// The function cv::min calculates the per-element minimum of two arrays: ///  /// or array and a scalar: ///  /// ## Parameters /// * src1: first input array. /// * src2: second input array of the same size and type as src1. /// * dst: output array of the same size and type as src1. /// ## See also /// max, compare, inRange, minMaxLoc /// /// ## Overloaded parameters /// /// needed to avoid conflicts with const _Tp& std::min(const _Tp&, const _Tp&, _Compare) pub fn min_mat_to(src1: &core::Mat, src2: &core::Mat, dst: &mut core::Mat) -> Result<()> { unsafe { sys::cv_min_Mat_Mat_Mat(src1.as_raw_Mat(), src2.as_raw_Mat(), dst.as_raw_Mat()) }.into_result() } pub fn min_mat_f64(a: &core::Mat, s: f64) -> Result<core::MatExpr> { unsafe { sys::cv_min_Mat_double(a.as_raw_Mat(), s) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// Calculates per-element minimum of two arrays or an array and a scalar. /// /// The function cv::min calculates the per-element minimum of two arrays: ///  /// or array and a scalar: ///  /// ## Parameters /// * src1: first input array. /// * src2: second input array of the same size and type as src1. /// * dst: output array of the same size and type as src1. /// ## See also /// max, compare, inRange, minMaxLoc /// /// ## Overloaded parameters /// /// needed to avoid conflicts with const _Tp& std::min(const _Tp&, const _Tp&, _Compare) pub fn min_umat_to(src1: &core::UMat, src2: &core::UMat, dst: &mut core::UMat) -> Result<()> { unsafe { sys::cv_min_UMat_UMat_UMat(src1.as_raw_UMat(), src2.as_raw_UMat(), dst.as_raw_UMat()) }.into_result() } /// Calculates per-element minimum of two arrays or an array and a scalar. /// /// The function cv::min calculates the per-element minimum of two arrays: ///  /// or array and a scalar: ///  /// ## Parameters /// * src1: first input array. /// * src2: second input array of the same size and type as src1. /// * dst: output array of the same size and type as src1. /// ## See also /// max, compare, inRange, minMaxLoc pub fn min(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); unsafe { sys::cv_min__InputArray__InputArray__OutputArray(src1.as_raw__InputArray(), src2.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } pub fn min_f64_mat(s: f64, a: &core::Mat) -> Result<core::MatExpr> { unsafe { sys::cv_min_double_Mat(s, a.as_raw_Mat()) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// Copies specified channels from input arrays to the specified channels of /// output arrays. /// /// The function cv::mixChannels provides an advanced mechanism for shuffling image channels. /// /// cv::split,cv::merge,cv::extractChannel,cv::insertChannel and some forms of cv::cvtColor are partial cases of cv::mixChannels. /// /// In the example below, the code splits a 4-channel BGRA image into a 3-channel BGR (with B and R /// channels swapped) and a separate alpha-channel image: /// ```ignore{.cpp} /// Mat bgra( 100, 100, CV_8UC4, Scalar(255,0,0,255) ); /// Mat bgr( bgra.rows, bgra.cols, CV_8UC3 ); /// Mat alpha( bgra.rows, bgra.cols, CV_8UC1 ); /// /// // forming an array of matrices is a quite efficient operation, /// // because the matrix data is not copied, only the headers /// Mat out[] = { bgr, alpha }; /// // bgra[0] -> bgr[2], bgra[1] -> bgr[1], /// // bgra[2] -> bgr[0], bgra[3] -> alpha[0] /// int from_to[] = { 0,2, 1,1, 2,0, 3,3 }; /// mixChannels( &bgra, 1, out, 2, from_to, 4 ); /// ``` /// /// /// Note: Unlike many other new-style C++ functions in OpenCV (see the introduction section and /// Mat::create ), cv::mixChannels requires the output arrays to be pre-allocated before calling the /// function. /// ## Parameters /// * src: input array or vector of matrices; all of the matrices must have the same size and the /// same depth. /// * nsrcs: number of matrices in `src`. /// * dst: output array or vector of matrices; all the matrices **must be allocated**; their size and /// depth must be the same as in `src[0]`. /// * ndsts: number of matrices in `dst`. /// * fromTo: array of index pairs specifying which channels are copied and where; fromTo[k\*2] is /// a 0-based index of the input channel in src, fromTo[k\*2+1] is an index of the output channel in /// dst; the continuous channel numbering is used: the first input image channels are indexed from 0 to /// src[0].channels()-1, the second input image channels are indexed from src[0].channels() to /// src[0].channels() + src[1].channels()-1, and so on, the same scheme is used for the output image /// channels; as a special case, when fromTo[k\*2] is negative, the corresponding output channel is /// filled with zero . /// * npairs: number of index pairs in `fromTo`. /// ## See also /// split, merge, extractChannel, insertChannel, cvtColor /// /// ## Overloaded parameters /// /// * src: input array or vector of matrices; all of the matrices must have the same size and the /// same depth. /// * dst: output array or vector of matrices; all the matrices **must be allocated**; their size and /// depth must be the same as in src[0]. /// * fromTo: array of index pairs specifying which channels are copied and where; fromTo[k\*2] is /// a 0-based index of the input channel in src, fromTo[k\*2+1] is an index of the output channel in /// dst; the continuous channel numbering is used: the first input image channels are indexed from 0 to /// src[0].channels()-1, the second input image channels are indexed from src[0].channels() to /// src[0].channels() + src[1].channels()-1, and so on, the same scheme is used for the output image /// channels; as a special case, when fromTo[k\*2] is negative, the corresponding output channel is /// filled with zero . pub fn mix_channels(src: &dyn core::ToInputArray, dst: &mut dyn core::ToInputOutputArray, from_to: &types::VectorOfint) -> Result<()> { input_array_arg!(src); input_output_array_arg!(dst); unsafe { sys::cv_mixChannels__InputArray__InputOutputArray_VectorOfint(src.as_raw__InputArray(), dst.as_raw__InputOutputArray(), from_to.as_raw_VectorOfint()) }.into_result() } /// Performs the per-element multiplication of two Fourier spectrums. /// /// The function cv::mulSpectrums performs the per-element multiplication of the two CCS-packed or complex /// matrices that are results of a real or complex Fourier transform. /// /// The function, together with dft and idft , may be used to calculate convolution (pass conjB=false ) /// or correlation (pass conjB=true ) of two arrays rapidly. When the arrays are complex, they are /// simply multiplied (per element) with an optional conjugation of the second-array elements. When the /// arrays are real, they are assumed to be CCS-packed (see dft for details). /// ## Parameters /// * a: first input array. /// * b: second input array of the same size and type as src1 . /// * c: output array of the same size and type as src1 . /// * flags: operation flags; currently, the only supported flag is cv::DFT_ROWS, which indicates that /// each row of src1 and src2 is an independent 1D Fourier spectrum. If you do not want to use this flag, then simply add a `0` as value. /// * conjB: optional flag that conjugates the second input array before the multiplication (true) /// or not (false). /// /// ## C++ default parameters /// * conj_b: false pub fn mul_spectrums(a: &dyn core::ToInputArray, b: &dyn core::ToInputArray, c: &mut dyn core::ToOutputArray, flags: i32, conj_b: bool) -> Result<()> { input_array_arg!(a); input_array_arg!(b); output_array_arg!(c); unsafe { sys::cv_mulSpectrums__InputArray__InputArray__OutputArray_int_bool(a.as_raw__InputArray(), b.as_raw__InputArray(), c.as_raw__OutputArray(), flags, conj_b) }.into_result() } /// Calculates the product of a matrix and its transposition. /// /// The function cv::mulTransposed calculates the product of src and its /// transposition: ///  /// if aTa=true , and ///  /// otherwise. The function is used to calculate the covariance matrix. With /// zero delta, it can be used as a faster substitute for general matrix /// product A\*B when B=A' /// ## Parameters /// * src: input single-channel matrix. Note that unlike gemm, the /// function can multiply not only floating-point matrices. /// * dst: output square matrix. /// * aTa: Flag specifying the multiplication ordering. See the /// description below. /// * delta: Optional delta matrix subtracted from src before the /// multiplication. When the matrix is empty ( delta=noArray() ), it is /// assumed to be zero, that is, nothing is subtracted. If it has the same /// size as src , it is simply subtracted. Otherwise, it is "repeated" (see /// repeat ) to cover the full src and then subtracted. Type of the delta /// matrix, when it is not empty, must be the same as the type of created /// output matrix. See the dtype parameter description below. /// * scale: Optional scale factor for the matrix product. /// * dtype: Optional type of the output matrix. When it is negative, /// the output matrix will have the same type as src . Otherwise, it will be /// type=CV_MAT_DEPTH(dtype) that should be either CV_32F or CV_64F . /// ## See also /// calcCovarMatrix, gemm, repeat, reduce /// /// ## C++ default parameters /// * delta: noArray() /// * scale: 1 /// * dtype: -1 pub fn mul_transposed(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, a_ta: bool, delta: &dyn core::ToInputArray, scale: f64, dtype: i32) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); input_array_arg!(delta); unsafe { sys::cv_mulTransposed__InputArray__OutputArray_bool__InputArray_double_int(src.as_raw__InputArray(), dst.as_raw__OutputArray(), a_ta, delta.as_raw__InputArray(), scale, dtype) }.into_result() } /// Calculates the per-element scaled product of two arrays. /// /// The function multiply calculates the per-element product of two arrays: /// ///  /// /// There is also a @ref MatrixExpressions -friendly variant of the first function. See Mat::mul . /// /// For a not-per-element matrix product, see gemm . /// /// /// Note: Saturation is not applied when the output array has the depth /// CV_32S. You may even get result of an incorrect sign in the case of /// overflow. /// ## Parameters /// * src1: first input array. /// * src2: second input array of the same size and the same type as src1. /// * dst: output array of the same size and type as src1. /// * scale: optional scale factor. /// * dtype: optional depth of the output array /// ## See also /// add, subtract, divide, scaleAdd, addWeighted, accumulate, accumulateProduct, accumulateSquare, /// Mat::convertTo /// /// ## C++ default parameters /// * scale: 1 /// * dtype: -1 pub fn multiply(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, scale: f64, dtype: i32) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); unsafe { sys::cv_multiply__InputArray__InputArray__OutputArray_double_int(src1.as_raw__InputArray(), src2.as_raw__InputArray(), dst.as_raw__OutputArray(), scale, dtype) }.into_result() } pub fn no_array() -> Result<core::_InputOutputArray> { unsafe { sys::cv_noArray() }.into_result().map(|ptr| core::_InputOutputArray { ptr }) } pub fn norm_l1(a: &f32, b: &f32, n: i32) -> Result<f32> { unsafe { sys::cv_normL1_const_float_X_const_float_X_int(a, b, n) }.into_result() } pub fn norm_l2(a: &u8, b: &u8, n: i32) -> Result<i32> { unsafe { sys::cv_normL1_const_uchar_X_const_uchar_X_int(a, b, n) }.into_result() } pub fn norm_l2_sqr(a: &f32, b: &f32, n: i32) -> Result<f32> { unsafe { sys::cv_normL2Sqr_const_float_X_const_float_X_int(a, b, n) }.into_result() } /// Calculates the absolute norm of an array. /// /// This version of #norm calculates the absolute norm of src1. The type of norm to calculate is specified using #NormTypes. /// /// As example for one array consider the function . /// The  and  norm for the sample value  /// is calculated as follows /// \f{align*} /// \| r(-1) \|_{L_1} &= |-1| + |2| = 3 \\ /// \| r(-1) \|_{L_2} &= \sqrt{(-1)^{2} + (2)^{2}} = \sqrt{5} \\ /// \| r(-1) \|_{L_\infty} &= \max(|-1|,|2|) = 2 /// \f} /// and for  the calculation is /// \f{align*} /// \| r(0.5) \|_{L_1} &= |0.5| + |0.5| = 1 \\ /// \| r(0.5) \|_{L_2} &= \sqrt{(0.5)^{2} + (0.5)^{2}} = \sqrt{0.5} \\ /// \| r(0.5) \|_{L_\infty} &= \max(|0.5|,|0.5|) = 0.5. /// \f} /// The following graphic shows all values for the three norm functions  and . /// It is notable that the  norm forms the upper and the  norm forms the lower border for the example function . /// 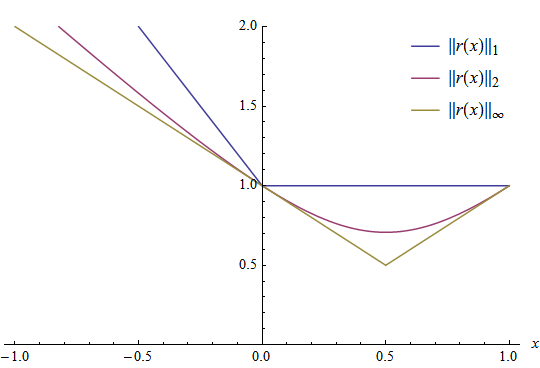 /// /// When the mask parameter is specified and it is not empty, the norm is /// /// If normType is not specified, #NORM_L2 is used. /// calculated only over the region specified by the mask. /// /// Multi-channel input arrays are treated as single-channel arrays, that is, /// the results for all channels are combined. /// /// Hamming norms can only be calculated with CV_8U depth arrays. /// /// ## Parameters /// * src1: first input array. /// * normType: type of the norm (see #NormTypes). /// * mask: optional operation mask; it must have the same size as src1 and CV_8UC1 type. /// /// ## Overloaded parameters /// /// * src: first input array. /// * normType: type of the norm (see #NormTypes). pub fn norm_sparse(src: &core::SparseMat, norm_type: i32) -> Result<f64> { unsafe { sys::cv_norm_SparseMat_int(src.as_raw_SparseMat(), norm_type) }.into_result() } /// Calculates an absolute difference norm or a relative difference norm. /// /// This version of cv::norm calculates the absolute difference norm /// or the relative difference norm of arrays src1 and src2. /// The type of norm to calculate is specified using #NormTypes. /// /// ## Parameters /// * src1: first input array. /// * src2: second input array of the same size and the same type as src1. /// * normType: type of the norm (see #NormTypes). /// * mask: optional operation mask; it must have the same size as src1 and CV_8UC1 type. /// /// ## C++ default parameters /// * norm_type: NORM_L2 /// * mask: noArray() pub fn norm2(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, norm_type: i32, mask: &dyn core::ToInputArray) -> Result<f64> { input_array_arg!(src1); input_array_arg!(src2); input_array_arg!(mask); unsafe { sys::cv_norm__InputArray__InputArray_int__InputArray(src1.as_raw__InputArray(), src2.as_raw__InputArray(), norm_type, mask.as_raw__InputArray()) }.into_result() } /// Calculates the absolute norm of an array. /// /// This version of #norm calculates the absolute norm of src1. The type of norm to calculate is specified using #NormTypes. /// /// As example for one array consider the function . /// The  and  norm for the sample value  /// is calculated as follows /// \f{align*} /// \| r(-1) \|_{L_1} &= |-1| + |2| = 3 \\ /// \| r(-1) \|_{L_2} &= \sqrt{(-1)^{2} + (2)^{2}} = \sqrt{5} \\ /// \| r(-1) \|_{L_\infty} &= \max(|-1|,|2|) = 2 /// \f} /// and for  the calculation is /// \f{align*} /// \| r(0.5) \|_{L_1} &= |0.5| + |0.5| = 1 \\ /// \| r(0.5) \|_{L_2} &= \sqrt{(0.5)^{2} + (0.5)^{2}} = \sqrt{0.5} \\ /// \| r(0.5) \|_{L_\infty} &= \max(|0.5|,|0.5|) = 0.5. /// \f} /// The following graphic shows all values for the three norm functions  and . /// It is notable that the  norm forms the upper and the  norm forms the lower border for the example function . ///  /// /// When the mask parameter is specified and it is not empty, the norm is /// /// If normType is not specified, #NORM_L2 is used. /// calculated only over the region specified by the mask. /// /// Multi-channel input arrays are treated as single-channel arrays, that is, /// the results for all channels are combined. /// /// Hamming norms can only be calculated with CV_8U depth arrays. /// /// ## Parameters /// * src1: first input array. /// * normType: type of the norm (see #NormTypes). /// * mask: optional operation mask; it must have the same size as src1 and CV_8UC1 type. /// /// ## C++ default parameters /// * norm_type: NORM_L2 /// * mask: noArray() pub fn norm(src1: &dyn core::ToInputArray, norm_type: i32, mask: &dyn core::ToInputArray) -> Result<f64> { input_array_arg!(src1); input_array_arg!(mask); unsafe { sys::cv_norm__InputArray_int__InputArray(src1.as_raw__InputArray(), norm_type, mask.as_raw__InputArray()) }.into_result() } /// Normalizes the norm or value range of an array. /// /// The function cv::normalize normalizes scale and shift the input array elements so that ///  /// (where p=Inf, 1 or 2) when normType=NORM_INF, NORM_L1, or NORM_L2, respectively; or so that ///  /// /// when normType=NORM_MINMAX (for dense arrays only). The optional mask specifies a sub-array to be /// normalized. This means that the norm or min-n-max are calculated over the sub-array, and then this /// sub-array is modified to be normalized. If you want to only use the mask to calculate the norm or /// min-max but modify the whole array, you can use norm and Mat::convertTo. /// /// In case of sparse matrices, only the non-zero values are analyzed and transformed. Because of this, /// the range transformation for sparse matrices is not allowed since it can shift the zero level. /// /// Possible usage with some positive example data: /// ```ignore{.cpp} /// vector<double> positiveData = { 2.0, 8.0, 10.0 }; /// vector<double> normalizedData_l1, normalizedData_l2, normalizedData_inf, normalizedData_minmax; /// /// // Norm to probability (total count) /// // sum(numbers) = 20.0 /// // 2.0 0.1 (2.0/20.0) /// // 8.0 0.4 (8.0/20.0) /// // 10.0 0.5 (10.0/20.0) /// normalize(positiveData, normalizedData_l1, 1.0, 0.0, NORM_L1); /// /// // Norm to unit vector: ||positiveData|| = 1.0 /// // 2.0 0.15 /// // 8.0 0.62 /// // 10.0 0.77 /// normalize(positiveData, normalizedData_l2, 1.0, 0.0, NORM_L2); /// /// // Norm to max element /// // 2.0 0.2 (2.0/10.0) /// // 8.0 0.8 (8.0/10.0) /// // 10.0 1.0 (10.0/10.0) /// normalize(positiveData, normalizedData_inf, 1.0, 0.0, NORM_INF); /// /// // Norm to range [0.0;1.0] /// // 2.0 0.0 (shift to left border) /// // 8.0 0.75 (6.0/8.0) /// // 10.0 1.0 (shift to right border) /// normalize(positiveData, normalizedData_minmax, 1.0, 0.0, NORM_MINMAX); /// ``` /// /// /// ## Parameters /// * src: input array. /// * dst: output array of the same size as src . /// * alpha: norm value to normalize to or the lower range boundary in case of the range /// normalization. /// * beta: upper range boundary in case of the range normalization; it is not used for the norm /// normalization. /// * norm_type: normalization type (see cv::NormTypes). /// * dtype: when negative, the output array has the same type as src; otherwise, it has the same /// number of channels as src and the depth =CV_MAT_DEPTH(dtype). /// * mask: optional operation mask. /// ## See also /// norm, Mat::convertTo, SparseMat::convertTo /// /// ## Overloaded parameters /// /// * src: input array. /// * dst: output array of the same size as src . /// * alpha: norm value to normalize to or the lower range boundary in case of the range /// normalization. /// * normType: normalization type (see cv::NormTypes). pub fn normalize_sparse(src: &core::SparseMat, dst: &mut core::SparseMat, alpha: f64, norm_type: i32) -> Result<()> { unsafe { sys::cv_normalize_SparseMat_SparseMat_double_int(src.as_raw_SparseMat(), dst.as_raw_SparseMat(), alpha, norm_type) }.into_result() } /// Normalizes the norm or value range of an array. /// /// The function cv::normalize normalizes scale and shift the input array elements so that ///  /// (where p=Inf, 1 or 2) when normType=NORM_INF, NORM_L1, or NORM_L2, respectively; or so that ///  /// /// when normType=NORM_MINMAX (for dense arrays only). The optional mask specifies a sub-array to be /// normalized. This means that the norm or min-n-max are calculated over the sub-array, and then this /// sub-array is modified to be normalized. If you want to only use the mask to calculate the norm or /// min-max but modify the whole array, you can use norm and Mat::convertTo. /// /// In case of sparse matrices, only the non-zero values are analyzed and transformed. Because of this, /// the range transformation for sparse matrices is not allowed since it can shift the zero level. /// /// Possible usage with some positive example data: /// ```ignore{.cpp} /// vector<double> positiveData = { 2.0, 8.0, 10.0 }; /// vector<double> normalizedData_l1, normalizedData_l2, normalizedData_inf, normalizedData_minmax; /// /// // Norm to probability (total count) /// // sum(numbers) = 20.0 /// // 2.0 0.1 (2.0/20.0) /// // 8.0 0.4 (8.0/20.0) /// // 10.0 0.5 (10.0/20.0) /// normalize(positiveData, normalizedData_l1, 1.0, 0.0, NORM_L1); /// /// // Norm to unit vector: ||positiveData|| = 1.0 /// // 2.0 0.15 /// // 8.0 0.62 /// // 10.0 0.77 /// normalize(positiveData, normalizedData_l2, 1.0, 0.0, NORM_L2); /// /// // Norm to max element /// // 2.0 0.2 (2.0/10.0) /// // 8.0 0.8 (8.0/10.0) /// // 10.0 1.0 (10.0/10.0) /// normalize(positiveData, normalizedData_inf, 1.0, 0.0, NORM_INF); /// /// // Norm to range [0.0;1.0] /// // 2.0 0.0 (shift to left border) /// // 8.0 0.75 (6.0/8.0) /// // 10.0 1.0 (shift to right border) /// normalize(positiveData, normalizedData_minmax, 1.0, 0.0, NORM_MINMAX); /// ``` /// /// /// ## Parameters /// * src: input array. /// * dst: output array of the same size as src . /// * alpha: norm value to normalize to or the lower range boundary in case of the range /// normalization. /// * beta: upper range boundary in case of the range normalization; it is not used for the norm /// normalization. /// * norm_type: normalization type (see cv::NormTypes). /// * dtype: when negative, the output array has the same type as src; otherwise, it has the same /// number of channels as src and the depth =CV_MAT_DEPTH(dtype). /// * mask: optional operation mask. /// ## See also /// norm, Mat::convertTo, SparseMat::convertTo /// /// ## C++ default parameters /// * alpha: 1 /// * beta: 0 /// * norm_type: NORM_L2 /// * dtype: -1 /// * mask: noArray() pub fn normalize(src: &dyn core::ToInputArray, dst: &mut dyn core::ToInputOutputArray, alpha: f64, beta: f64, norm_type: i32, dtype: i32, mask: &dyn core::ToInputArray) -> Result<()> { input_array_arg!(src); input_output_array_arg!(dst); input_array_arg!(mask); unsafe { sys::cv_normalize__InputArray__InputOutputArray_double_double_int_int__InputArray(src.as_raw__InputArray(), dst.as_raw__InputOutputArray(), alpha, beta, norm_type, dtype, mask.as_raw__InputArray()) }.into_result() } /// Attaches OpenCL context to OpenCV /// /// Note: /// OpenCV will check if available OpenCL platform has platformName name, then assign context to /// OpenCV and call `clRetainContext` function. The deviceID device will be used as target device and /// new command queue will be created. /// ## Parameters /// * platformName: name of OpenCL platform to attach, this string is used to check if platform is available to OpenCV at runtime /// * platformID: ID of platform attached context was created for /// * context: OpenCL context to be attached to OpenCV /// * deviceID: ID of device, must be created from attached context pub fn attach_context(platform_name: &str, platform_id: &mut c_void, context: &mut c_void, device_id: &mut c_void) -> Result<()> { string_arg!(platform_name); unsafe { sys::cv_ocl_attachContext_String_void_X_void_X_void_X(platform_name.as_ptr(), platform_id, context, device_id) }.into_result() } pub fn build_options_add_matrix_description(build_options: &mut String, name: &str, _m: &dyn core::ToInputArray) -> Result<()> { string_arg_output_send!(via build_options_via); string_arg!(name); input_array_arg!(_m); let out = unsafe { sys::cv_ocl_buildOptionsAddMatrixDescription_String_String__InputArray(&mut build_options_via, name.as_ptr(), _m.as_raw__InputArray()) }.into_result(); string_arg_output_receive!(build_options_via => build_options); return out; } /// /// ## C++ default parameters /// * src2: noArray() /// * src3: noArray() /// * src4: noArray() /// * src5: noArray() /// * src6: noArray() /// * src7: noArray() /// * src8: noArray() /// * src9: noArray() /// * strat: OCL_VECTOR_DEFAULT pub fn check_optimal_vector_width(vector_widths: &i32, src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, src3: &dyn core::ToInputArray, src4: &dyn core::ToInputArray, src5: &dyn core::ToInputArray, src6: &dyn core::ToInputArray, src7: &dyn core::ToInputArray, src8: &dyn core::ToInputArray, src9: &dyn core::ToInputArray, strat: core::OclVectorStrategy) -> Result<i32> { input_array_arg!(src1); input_array_arg!(src2); input_array_arg!(src3); input_array_arg!(src4); input_array_arg!(src5); input_array_arg!(src6); input_array_arg!(src7); input_array_arg!(src8); input_array_arg!(src9); unsafe { sys::cv_ocl_checkOptimalVectorWidth_const_int_X__InputArray__InputArray__InputArray__InputArray__InputArray__InputArray__InputArray__InputArray__InputArray_OclVectorStrategy(vector_widths, src1.as_raw__InputArray(), src2.as_raw__InputArray(), src3.as_raw__InputArray(), src4.as_raw__InputArray(), src5.as_raw__InputArray(), src6.as_raw__InputArray(), src7.as_raw__InputArray(), src8.as_raw__InputArray(), src9.as_raw__InputArray(), strat) }.into_result() } /// Convert OpenCL buffer to UMat /// /// Note: /// OpenCL buffer (cl_mem_buffer) should contain 2D image data, compatible with OpenCV. Memory /// content is not copied from `clBuffer` to UMat. Instead, buffer handle assigned to UMat and /// `clRetainMemObject` is called. /// ## Parameters /// * cl_mem_buffer: source clBuffer handle /// * step: num of bytes in single row /// * rows: number of rows /// * cols: number of cols /// * type: OpenCV type of image /// * dst: destination UMat pub fn convert_from_buffer(cl_mem_buffer: &mut c_void, step: size_t, rows: i32, cols: i32, _type: i32, dst: &mut core::UMat) -> Result<()> { unsafe { sys::cv_ocl_convertFromBuffer_void_X_size_t_int_int_int_UMat(cl_mem_buffer, step, rows, cols, _type, dst.as_raw_UMat()) }.into_result() } /// Convert OpenCL image2d_t to UMat /// /// Note: /// OpenCL `image2d_t` (cl_mem_image), should be compatible with OpenCV UMat formats. Memory content /// is copied from image to UMat with `clEnqueueCopyImageToBuffer` function. /// ## Parameters /// * cl_mem_image: source image2d_t handle /// * dst: destination UMat pub fn convert_from_image(cl_mem_image: &mut c_void, dst: &mut core::UMat) -> Result<()> { unsafe { sys::cv_ocl_convertFromImage_void_X_UMat(cl_mem_image, dst.as_raw_UMat()) }.into_result() } pub fn convert_type_str(sdepth: i32, ddepth: i32, cn: i32, buf: &str) -> Result<String> { string_arg!(buf); unsafe { sys::cv_ocl_convertTypeStr_int_int_int_char_X(sdepth, ddepth, cn, buf.as_ptr() as _) }.into_result().map(crate::templ::receive_string) } pub fn finish() -> Result<()> { unsafe { sys::cv_ocl_finish() }.into_result() } pub fn get_opencl_error_string(error_code: i32) -> Result<String> { unsafe { sys::cv_ocl_getOpenCLErrorString_int(error_code) }.into_result().map(crate::templ::receive_string) } pub fn get_platfoms_info(platform_info: &mut types::VectorOfPlatformInfo) -> Result<()> { unsafe { sys::cv_ocl_getPlatfomsInfo_VectorOfPlatformInfo(platform_info.as_raw_VectorOfPlatformInfo()) }.into_result() } pub fn have_amd_blas() -> Result<bool> { unsafe { sys::cv_ocl_haveAmdBlas() }.into_result() } pub fn have_amd_fft() -> Result<bool> { unsafe { sys::cv_ocl_haveAmdFft() }.into_result() } pub fn have_opencl() -> Result<bool> { unsafe { sys::cv_ocl_haveOpenCL() }.into_result() } pub fn have_svm() -> Result<bool> { unsafe { sys::cv_ocl_haveSVM() }.into_result() } /// /// ## C++ default parameters /// * ddepth: -1 /// * name: NULL pub fn kernel_to_str(_kernel: &dyn core::ToInputArray, ddepth: i32, name: &str) -> Result<String> { input_array_arg!(_kernel); string_arg!(name); unsafe { sys::cv_ocl_kernelToStr__InputArray_int_const_char_X(_kernel.as_raw__InputArray(), ddepth, name.as_ptr()) }.into_result().map(crate::templ::receive_string_mut) } pub fn memop_type_to_str(t: i32) -> Result<String> { unsafe { sys::cv_ocl_memopTypeToStr_int(t) }.into_result().map(crate::templ::receive_string) } /// /// ## C++ default parameters /// * src2: noArray() /// * src3: noArray() /// * src4: noArray() /// * src5: noArray() /// * src6: noArray() /// * src7: noArray() /// * src8: noArray() /// * src9: noArray() pub fn predict_optimal_vector_width_max(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, src3: &dyn core::ToInputArray, src4: &dyn core::ToInputArray, src5: &dyn core::ToInputArray, src6: &dyn core::ToInputArray, src7: &dyn core::ToInputArray, src8: &dyn core::ToInputArray, src9: &dyn core::ToInputArray) -> Result<i32> { input_array_arg!(src1); input_array_arg!(src2); input_array_arg!(src3); input_array_arg!(src4); input_array_arg!(src5); input_array_arg!(src6); input_array_arg!(src7); input_array_arg!(src8); input_array_arg!(src9); unsafe { sys::cv_ocl_predictOptimalVectorWidthMax__InputArray__InputArray__InputArray__InputArray__InputArray__InputArray__InputArray__InputArray__InputArray(src1.as_raw__InputArray(), src2.as_raw__InputArray(), src3.as_raw__InputArray(), src4.as_raw__InputArray(), src5.as_raw__InputArray(), src6.as_raw__InputArray(), src7.as_raw__InputArray(), src8.as_raw__InputArray(), src9.as_raw__InputArray()) }.into_result() } /// /// ## C++ default parameters /// * src2: noArray() /// * src3: noArray() /// * src4: noArray() /// * src5: noArray() /// * src6: noArray() /// * src7: noArray() /// * src8: noArray() /// * src9: noArray() /// * strat: OCL_VECTOR_DEFAULT pub fn predict_optimal_vector_width(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, src3: &dyn core::ToInputArray, src4: &dyn core::ToInputArray, src5: &dyn core::ToInputArray, src6: &dyn core::ToInputArray, src7: &dyn core::ToInputArray, src8: &dyn core::ToInputArray, src9: &dyn core::ToInputArray, strat: core::OclVectorStrategy) -> Result<i32> { input_array_arg!(src1); input_array_arg!(src2); input_array_arg!(src3); input_array_arg!(src4); input_array_arg!(src5); input_array_arg!(src6); input_array_arg!(src7); input_array_arg!(src8); input_array_arg!(src9); unsafe { sys::cv_ocl_predictOptimalVectorWidth__InputArray__InputArray__InputArray__InputArray__InputArray__InputArray__InputArray__InputArray__InputArray_OclVectorStrategy(src1.as_raw__InputArray(), src2.as_raw__InputArray(), src3.as_raw__InputArray(), src4.as_raw__InputArray(), src5.as_raw__InputArray(), src6.as_raw__InputArray(), src7.as_raw__InputArray(), src8.as_raw__InputArray(), src9.as_raw__InputArray(), strat) }.into_result() } pub fn set_use_opencl(flag: bool) -> Result<()> { unsafe { sys::cv_ocl_setUseOpenCL_bool(flag) }.into_result() } pub fn type_to_str(t: i32) -> Result<String> { unsafe { sys::cv_ocl_typeToStr_int(t) }.into_result().map(crate::templ::receive_string) } pub fn use_opencl() -> Result<bool> { unsafe { sys::cv_ocl_useOpenCL() }.into_result() } pub fn vecop_type_to_str(t: i32) -> Result<String> { unsafe { sys::cv_ocl_vecopTypeToStr_int(t) }.into_result().map(crate::templ::receive_string) } /// Parallel data processor /// /// ## C++ default parameters /// * nstripes: -1. pub fn parallel_for_(range: &core::Range, body: &dyn core::ParallelLoopBody, nstripes: f64) -> Result<()> { unsafe { sys::cv_parallel_for__Range_ParallelLoopBody_double(range.as_raw_Range(), body.as_raw_ParallelLoopBody(), nstripes) }.into_result() } /// converts NaN's to the given number /// /// ## C++ default parameters /// * val: 0 pub fn patch_na_ns(a: &mut dyn core::ToInputOutputArray, val: f64) -> Result<()> { input_output_array_arg!(a); unsafe { sys::cv_patchNaNs__InputOutputArray_double(a.as_raw__InputOutputArray(), val) }.into_result() } /// Performs the perspective matrix transformation of vectors. /// /// The function cv::perspectiveTransform transforms every element of src by /// treating it as a 2D or 3D vector, in the following way: ///  /// where ///  /// and ///  /// /// Here a 3D vector transformation is shown. In case of a 2D vector /// transformation, the z component is omitted. /// /// /// Note: The function transforms a sparse set of 2D or 3D vectors. If you /// want to transform an image using perspective transformation, use /// warpPerspective . If you have an inverse problem, that is, you want to /// compute the most probable perspective transformation out of several /// pairs of corresponding points, you can use getPerspectiveTransform or /// findHomography . /// ## Parameters /// * src: input two-channel or three-channel floating-point array; each /// element is a 2D/3D vector to be transformed. /// * dst: output array of the same size and type as src. /// * m: 3x3 or 4x4 floating-point transformation matrix. /// ## See also /// transform, warpPerspective, getPerspectiveTransform, findHomography pub fn perspective_transform(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, m: &dyn core::ToInputArray) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); input_array_arg!(m); unsafe { sys::cv_perspectiveTransform__InputArray__OutputArray__InputArray(src.as_raw__InputArray(), dst.as_raw__OutputArray(), m.as_raw__InputArray()) }.into_result() } /// Calculates the rotation angle of 2D vectors. /// /// The function cv::phase calculates the rotation angle of each 2D vector that /// is formed from the corresponding elements of x and y : ///  /// /// The angle estimation accuracy is about 0.3 degrees. When x(I)=y(I)=0 , /// the corresponding angle(I) is set to 0. /// ## Parameters /// * x: input floating-point array of x-coordinates of 2D vectors. /// * y: input array of y-coordinates of 2D vectors; it must have the /// same size and the same type as x. /// * angle: output array of vector angles; it has the same size and /// same type as x . /// * angleInDegrees: when true, the function calculates the angle in /// degrees, otherwise, they are measured in radians. /// /// ## C++ default parameters /// * angle_in_degrees: false pub fn phase(x: &dyn core::ToInputArray, y: &dyn core::ToInputArray, angle: &mut dyn core::ToOutputArray, angle_in_degrees: bool) -> Result<()> { input_array_arg!(x); input_array_arg!(y); output_array_arg!(angle); unsafe { sys::cv_phase__InputArray__InputArray__OutputArray_bool(x.as_raw__InputArray(), y.as_raw__InputArray(), angle.as_raw__OutputArray(), angle_in_degrees) }.into_result() } /// Calculates x and y coordinates of 2D vectors from their magnitude and angle. /// /// The function cv::polarToCart calculates the Cartesian coordinates of each 2D /// vector represented by the corresponding elements of magnitude and angle: ///  /// /// The relative accuracy of the estimated coordinates is about 1e-6. /// ## Parameters /// * magnitude: input floating-point array of magnitudes of 2D vectors; /// it can be an empty matrix (=Mat()), in this case, the function assumes /// that all the magnitudes are =1; if it is not empty, it must have the /// same size and type as angle. /// * angle: input floating-point array of angles of 2D vectors. /// * x: output array of x-coordinates of 2D vectors; it has the same /// size and type as angle. /// * y: output array of y-coordinates of 2D vectors; it has the same /// size and type as angle. /// * angleInDegrees: when true, the input angles are measured in /// degrees, otherwise, they are measured in radians. /// ## See also /// cartToPolar, magnitude, phase, exp, log, pow, sqrt /// /// ## C++ default parameters /// * angle_in_degrees: false pub fn polar_to_cart(magnitude: &dyn core::ToInputArray, angle: &dyn core::ToInputArray, x: &mut dyn core::ToOutputArray, y: &mut dyn core::ToOutputArray, angle_in_degrees: bool) -> Result<()> { input_array_arg!(magnitude); input_array_arg!(angle); output_array_arg!(x); output_array_arg!(y); unsafe { sys::cv_polarToCart__InputArray__InputArray__OutputArray__OutputArray_bool(magnitude.as_raw__InputArray(), angle.as_raw__InputArray(), x.as_raw__OutputArray(), y.as_raw__OutputArray(), angle_in_degrees) }.into_result() } /// Raises every array element to a power. /// /// The function cv::pow raises every element of the input array to power : ///  /// /// So, for a non-integer power exponent, the absolute values of input array /// elements are used. However, it is possible to get true values for /// negative values using some extra operations. In the example below, /// computing the 5th root of array src shows: /// ```ignore{.cpp} /// Mat mask = src < 0; /// pow(src, 1./5, dst); /// subtract(Scalar::all(0), dst, dst, mask); /// ``` /// /// For some values of power, such as integer values, 0.5 and -0.5, /// specialized faster algorithms are used. /// /// Special values (NaN, Inf) are not handled. /// ## Parameters /// * src: input array. /// * power: exponent of power. /// * dst: output array of the same size and type as src. /// ## See also /// sqrt, exp, log, cartToPolar, polarToCart pub fn pow(src: &dyn core::ToInputArray, power: f64, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_pow__InputArray_double__OutputArray(src.as_raw__InputArray(), power, dst.as_raw__OutputArray()) }.into_result() } /// Fills the array with normally distributed random numbers. /// /// The function cv::randn fills the matrix dst with normally distributed random numbers with the specified /// mean vector and the standard deviation matrix. The generated random numbers are clipped to fit the /// value range of the output array data type. /// ## Parameters /// * dst: output array of random numbers; the array must be pre-allocated and have 1 to 4 channels. /// * mean: mean value (expectation) of the generated random numbers. /// * stddev: standard deviation of the generated random numbers; it can be either a vector (in /// which case a diagonal standard deviation matrix is assumed) or a square matrix. /// ## See also /// RNG, randu pub fn randn(dst: &mut dyn core::ToInputOutputArray, mean: &dyn core::ToInputArray, stddev: &dyn core::ToInputArray) -> Result<()> { input_output_array_arg!(dst); input_array_arg!(mean); input_array_arg!(stddev); unsafe { sys::cv_randn__InputOutputArray__InputArray__InputArray(dst.as_raw__InputOutputArray(), mean.as_raw__InputArray(), stddev.as_raw__InputArray()) }.into_result() } /// Generates a single uniformly-distributed random number or an array of random numbers. /// /// Non-template variant of the function fills the matrix dst with uniformly-distributed /// random numbers from the specified range: ///  /// ## Parameters /// * dst: output array of random numbers; the array must be pre-allocated. /// * low: inclusive lower boundary of the generated random numbers. /// * high: exclusive upper boundary of the generated random numbers. /// ## See also /// RNG, randn, theRNG pub fn randu(dst: &mut dyn core::ToInputOutputArray, low: &dyn core::ToInputArray, high: &dyn core::ToInputArray) -> Result<()> { input_output_array_arg!(dst); input_array_arg!(low); input_array_arg!(high); unsafe { sys::cv_randu__InputOutputArray__InputArray__InputArray(dst.as_raw__InputOutputArray(), low.as_raw__InputArray(), high.as_raw__InputArray()) }.into_result() } pub fn read_dmatch(node: &core::FileNode, value: &mut core::DMatch, default_value: core::DMatch) -> Result<()> { unsafe { sys::cv_read_FileNode_DMatch_DMatch(node.as_raw_FileNode(), value, default_value) }.into_result() } pub fn read_keypoint(node: &core::FileNode, value: &mut core::KeyPoint, default_value: core::KeyPoint) -> Result<()> { unsafe { sys::cv_read_FileNode_KeyPoint_KeyPoint(node.as_raw_FileNode(), value, default_value) }.into_result() } /// /// ## C++ default parameters /// * default_mat: Mat() pub fn read_mat(node: &core::FileNode, mat: &mut core::Mat, default_mat: &core::Mat) -> Result<()> { unsafe { sys::cv_read_FileNode_Mat_Mat(node.as_raw_FileNode(), mat.as_raw_Mat(), default_mat.as_raw_Mat()) }.into_result() } pub fn read_range(node: &core::FileNode, value: &mut core::Range, default_value: &core::Range) -> Result<()> { unsafe { sys::cv_read_FileNode_Range_Range(node.as_raw_FileNode(), value.as_raw_Range(), default_value.as_raw_Range()) }.into_result() } /// /// ## C++ default parameters /// * default_mat: SparseMat() pub fn read_sparsemat(node: &core::FileNode, mat: &mut core::SparseMat, default_mat: &core::SparseMat) -> Result<()> { unsafe { sys::cv_read_FileNode_SparseMat_SparseMat(node.as_raw_FileNode(), mat.as_raw_SparseMat(), default_mat.as_raw_SparseMat()) }.into_result() } pub fn read(node: &core::FileNode, value: &mut String, default_value: &str) -> Result<()> { string_arg_output_send!(via value_via); string_arg!(default_value); let out = unsafe { sys::cv_read_FileNode_String_String(node.as_raw_FileNode(), &mut value_via, default_value.as_ptr()) }.into_result(); string_arg_output_receive!(value_via => value); return out; } pub fn read_dmatch_vec_legacy(node: &core::FileNode, matches: &mut types::VectorOfDMatch) -> Result<()> { unsafe { sys::cv_read_FileNode_VectorOfDMatch(node.as_raw_FileNode(), matches.as_raw_VectorOfDMatch()) }.into_result() } pub fn read_dmatch_vec(node: &core::FileNode, vec: &mut types::VectorOfDMatch, default_value: &types::VectorOfDMatch) -> Result<()> { unsafe { sys::cv_read_FileNode_VectorOfDMatch_VectorOfDMatch(node.as_raw_FileNode(), vec.as_raw_VectorOfDMatch(), default_value.as_raw_VectorOfDMatch()) }.into_result() } pub fn read_keypoint_vec_legacy(node: &core::FileNode, keypoints: &mut types::VectorOfKeyPoint) -> Result<()> { unsafe { sys::cv_read_FileNode_VectorOfKeyPoint(node.as_raw_FileNode(), keypoints.as_raw_VectorOfKeyPoint()) }.into_result() } pub fn read_keypoint_vec(node: &core::FileNode, vec: &mut types::VectorOfKeyPoint, default_value: &types::VectorOfKeyPoint) -> Result<()> { unsafe { sys::cv_read_FileNode_VectorOfKeyPoint_VectorOfKeyPoint(node.as_raw_FileNode(), vec.as_raw_VectorOfKeyPoint(), default_value.as_raw_VectorOfKeyPoint()) }.into_result() } /// @relates cv::FileNode pub fn read_bool(node: &core::FileNode, value: &mut bool, default_value: bool) -> Result<()> { unsafe { sys::cv_read_FileNode_bool_bool(node.as_raw_FileNode(), value, default_value) }.into_result() } pub fn read_f64(node: &core::FileNode, value: &mut f64, default_value: f64) -> Result<()> { unsafe { sys::cv_read_FileNode_double_double(node.as_raw_FileNode(), value, default_value) }.into_result() } pub fn read_f32(node: &core::FileNode, value: &mut f32, default_value: f32) -> Result<()> { unsafe { sys::cv_read_FileNode_float_float(node.as_raw_FileNode(), value, default_value) }.into_result() } /// @relates cv::FileNode pub fn read_i32(node: &core::FileNode, value: &mut i32, default_value: i32) -> Result<()> { unsafe { sys::cv_read_FileNode_int_int(node.as_raw_FileNode(), value, default_value) }.into_result() } pub fn read_i16(node: &core::FileNode, value: &mut i16, default_value: i16) -> Result<()> { unsafe { sys::cv_read_FileNode_short_short(node.as_raw_FileNode(), value, default_value) }.into_result() } pub fn read_u8(node: &core::FileNode, value: &mut u8, default_value: u8) -> Result<()> { unsafe { sys::cv_read_FileNode_uchar_uchar(node.as_raw_FileNode(), value, default_value) }.into_result() } pub fn read_u16(node: &core::FileNode, value: &mut u16, default_value: u16) -> Result<()> { unsafe { sys::cv_read_FileNode_ushort_ushort(node.as_raw_FileNode(), value, default_value) }.into_result() } /// Reduces a matrix to a vector. /// /// The function #reduce reduces the matrix to a vector by treating the matrix rows/columns as a set of /// 1D vectors and performing the specified operation on the vectors until a single row/column is /// obtained. For example, the function can be used to compute horizontal and vertical projections of a /// raster image. In case of #REDUCE_MAX and #REDUCE_MIN , the output image should have the same type as the source one. /// In case of #REDUCE_SUM and #REDUCE_AVG , the output may have a larger element bit-depth to preserve accuracy. /// And multi-channel arrays are also supported in these two reduction modes. /// /// The following code demonstrates its usage for a single channel matrix. /// @snippet snippets/core_reduce.cpp example /// /// And the following code demonstrates its usage for a two-channel matrix. /// @snippet snippets/core_reduce.cpp example2 /// /// ## Parameters /// * src: input 2D matrix. /// * dst: output vector. Its size and type is defined by dim and dtype parameters. /// * dim: dimension index along which the matrix is reduced. 0 means that the matrix is reduced to /// a single row. 1 means that the matrix is reduced to a single column. /// * rtype: reduction operation that could be one of #ReduceTypes /// * dtype: when negative, the output vector will have the same type as the input matrix, /// otherwise, its type will be CV_MAKE_TYPE(CV_MAT_DEPTH(dtype), src.channels()). /// ## See also /// repeat /// /// ## C++ default parameters /// * dtype: -1 pub fn reduce(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, dim: i32, rtype: i32, dtype: i32) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_reduce__InputArray__OutputArray_int_int_int(src.as_raw__InputArray(), dst.as_raw__OutputArray(), dim, rtype, dtype) }.into_result() } /// Fills the output array with repeated copies of the input array. /// /// The function cv::repeat duplicates the input array one or more times along each of the two axes: ///  /// The second variant of the function is more convenient to use with @ref MatrixExpressions. /// ## Parameters /// * src: input array to replicate. /// * ny: Flag to specify how many times the `src` is repeated along the /// vertical axis. /// * nx: Flag to specify how many times the `src` is repeated along the /// horizontal axis. /// * dst: output array of the same type as `src`. /// ## See also /// cv::reduce /// /// ## Overloaded parameters /// /// * src: input array to replicate. /// * ny: Flag to specify how many times the `src` is repeated along the /// vertical axis. /// * nx: Flag to specify how many times the `src` is repeated along the /// horizontal axis. pub fn repeat(src: &core::Mat, ny: i32, nx: i32) -> Result<core::Mat> { unsafe { sys::cv_repeat_Mat_int_int(src.as_raw_Mat(), ny, nx) }.into_result().map(|ptr| core::Mat { ptr }) } /// Fills the output array with repeated copies of the input array. /// /// The function cv::repeat duplicates the input array one or more times along each of the two axes: ///  /// The second variant of the function is more convenient to use with @ref MatrixExpressions. /// ## Parameters /// * src: input array to replicate. /// * ny: Flag to specify how many times the `src` is repeated along the /// vertical axis. /// * nx: Flag to specify how many times the `src` is repeated along the /// horizontal axis. /// * dst: output array of the same type as `src`. /// ## See also /// cv::reduce pub fn repeat_to(src: &dyn core::ToInputArray, ny: i32, nx: i32, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_repeat__InputArray_int_int__OutputArray(src.as_raw__InputArray(), ny, nx, dst.as_raw__OutputArray()) }.into_result() } /// Rotates a 2D array in multiples of 90 degrees. /// The function cv::rotate rotates the array in one of three different ways: /// Rotate by 90 degrees clockwise (rotateCode = ROTATE_90_CLOCKWISE). /// Rotate by 180 degrees clockwise (rotateCode = ROTATE_180). /// Rotate by 270 degrees clockwise (rotateCode = ROTATE_90_COUNTERCLOCKWISE). /// ## Parameters /// * src: input array. /// * dst: output array of the same type as src. The size is the same with ROTATE_180, /// and the rows and cols are switched for ROTATE_90_CLOCKWISE and ROTATE_90_COUNTERCLOCKWISE. /// * rotateCode: an enum to specify how to rotate the array; see the enum #RotateFlags /// ## See also /// transpose , repeat , completeSymm, flip, RotateFlags pub fn rotate(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, rotate_code: i32) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_rotate__InputArray__OutputArray_int(src.as_raw__InputArray(), dst.as_raw__OutputArray(), rotate_code) }.into_result() } /// Round first value up to the nearest multiple of second value. /// /// Use this function instead of `ceil((float)a / b) * b` expressions. /// /// ## See also /// divUp pub fn round_up(a: i32, b: u32) -> Result<i32> { unsafe { sys::cv_roundUp_int_unsigned_int(a, b) }.into_result() } /// Round first value up to the nearest multiple of second value. /// /// Use this function instead of `ceil((float)a / b) * b` expressions. /// /// ## See also /// divUp /// /// ## Overloaded parameters pub fn round_up_1(a: size_t, b: u32) -> Result<size_t> { unsafe { sys::cv_roundUp_size_t_unsigned_int(a, b) }.into_result() } /// Override search data path by adding new search location /// /// Use this only to override default behavior /// Passed paths are used in LIFO order. /// /// ## Parameters /// * path: Path to used samples data pub fn add_samples_data_search_path(path: &str) -> Result<()> { string_arg!(path); unsafe { sys::cv_samples_addSamplesDataSearchPath_String(path.as_ptr()) }.into_result() } /// Append samples search data sub directory /// /// General usage is to add OpenCV modules name (`<opencv_contrib>/modules/<name>/samples/data` -> `<name>/samples/data` + `modules/<name>/samples/data`). /// Passed subdirectories are used in LIFO order. /// /// ## Parameters /// * subdir: samples data sub directory pub fn add_samples_data_search_sub_directory(subdir: &str) -> Result<()> { string_arg!(subdir); unsafe { sys::cv_samples_addSamplesDataSearchSubDirectory_String(subdir.as_ptr()) }.into_result() } /// /// ## C++ default parameters /// * silent_mode: false pub fn find_file_or_keep(relative_path: &str, silent_mode: bool) -> Result<String> { string_arg!(relative_path); unsafe { sys::cv_samples_findFileOrKeep_String_bool(relative_path.as_ptr(), silent_mode) }.into_result().map(crate::templ::receive_string_mut) } /// Try to find requested data file /// /// Search directories: /// /// 1. Directories passed via `addSamplesDataSearchPath()` /// 2. OPENCV_SAMPLES_DATA_PATH_HINT environment variable /// 3. OPENCV_SAMPLES_DATA_PATH environment variable /// If parameter value is not empty and nothing is found then stop searching. /// 4. Detects build/install path based on: /// a. current working directory (CWD) /// b. and/or binary module location (opencv_core/opencv_world, doesn't work with static linkage) /// 5. Scan `<source>/{,data,samples/data}` directories if build directory is detected or the current directory is in source tree. /// 6. Scan `<install>/share/OpenCV` directory if install directory is detected. /// /// @see cv::utils::findDataFile /// /// ## Parameters /// * relative_path: Relative path to data file /// * required: Specify "file not found" handling. /// If true, function prints information message and raises cv::Exception. /// If false, function returns empty result /// * silentMode: Disables messages /// ## Returns /// Returns path (absolute or relative to the current directory) or empty string if file is not found /// /// ## C++ default parameters /// * required: true /// * silent_mode: false pub fn find_file(relative_path: &str, required: bool, silent_mode: bool) -> Result<String> { string_arg!(relative_path); unsafe { sys::cv_samples_findFile_String_bool_bool(relative_path.as_ptr(), required, silent_mode) }.into_result().map(crate::templ::receive_string_mut) } /// Calculates the sum of a scaled array and another array. /// /// The function scaleAdd is one of the classical primitive linear algebra operations, known as DAXPY /// or SAXPY in [BLAS](http://en.wikipedia.org/wiki/Basic_Linear_Algebra_Subprograms). It calculates /// the sum of a scaled array and another array: ///  /// The function can also be emulated with a matrix expression, for example: /// ```ignore{.cpp} /// Mat A(3, 3, CV_64F); /// ... /// A.row(0) = A.row(1)*2 + A.row(2); /// ``` /// /// ## Parameters /// * src1: first input array. /// * alpha: scale factor for the first array. /// * src2: second input array of the same size and type as src1. /// * dst: output array of the same size and type as src1. /// ## See also /// add, addWeighted, subtract, Mat::dot, Mat::convertTo pub fn scale_add(src1: &dyn core::ToInputArray, alpha: f64, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); unsafe { sys::cv_scaleAdd__InputArray_double__InputArray__OutputArray(src1.as_raw__InputArray(), alpha, src2.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } /// Sets/resets the break-on-error mode. /// /// When the break-on-error mode is set, the default error handler issues a hardware exception, which /// can make debugging more convenient. /// /// \return the previous state pub fn set_break_on_error(flag: bool) -> Result<bool> { unsafe { sys::cv_setBreakOnError_bool(flag) }.into_result() } /// Initializes a scaled identity matrix. /// /// The function cv::setIdentity initializes a scaled identity matrix: ///  /// /// The function can also be emulated using the matrix initializers and the /// matrix expressions: /// ```ignore /// Mat A = Mat::eye(4, 3, CV_32F)*5; /// // A will be set to [[5, 0, 0], [0, 5, 0], [0, 0, 5], [0, 0, 0]] /// ``` /// /// ## Parameters /// * mtx: matrix to initialize (not necessarily square). /// * s: value to assign to diagonal elements. /// ## See also /// Mat::zeros, Mat::ones, Mat::setTo, Mat::operator= /// /// ## C++ default parameters /// * s: Scalar(1) pub fn set_identity(mtx: &mut dyn core::ToInputOutputArray, s: core::Scalar) -> Result<()> { input_output_array_arg!(mtx); unsafe { sys::cv_setIdentity__InputOutputArray_Scalar(mtx.as_raw__InputOutputArray(), s) }.into_result() } /// OpenCV will try to set the number of threads for the next parallel region. /// /// If threads == 0, OpenCV will disable threading optimizations and run all it's functions /// sequentially. Passing threads \< 0 will reset threads number to system default. This function must /// be called outside of parallel region. /// /// OpenCV will try to run its functions with specified threads number, but some behaviour differs from /// framework: /// * `TBB` - User-defined parallel constructions will run with the same threads number, if /// another is not specified. If later on user creates his own scheduler, OpenCV will use it. /// * `OpenMP` - No special defined behaviour. /// * `Concurrency` - If threads == 1, OpenCV will disable threading optimizations and run its /// functions sequentially. /// * `GCD` - Supports only values \<= 0. /// * `C=` - No special defined behaviour. /// ## Parameters /// * nthreads: Number of threads used by OpenCV. /// ## See also /// getNumThreads, getThreadNum pub fn set_num_threads(nthreads: i32) -> Result<()> { unsafe { sys::cv_setNumThreads_int(nthreads) }.into_result() } /// Sets state of default random number generator. /// /// The function cv::setRNGSeed sets state of default random number generator to custom value. /// ## Parameters /// * seed: new state for default random number generator /// ## See also /// RNG, randu, randn pub fn set_rng_seed(seed: i32) -> Result<()> { unsafe { sys::cv_setRNGSeed_int(seed) }.into_result() } pub fn set_use_openvx(flag: bool) -> Result<()> { unsafe { sys::cv_setUseOpenVX_bool(flag) }.into_result() } /// Enables or disables the optimized code. /// /// The function can be used to dynamically turn on and off optimized dispatched code (code that uses SSE4.2, AVX/AVX2, /// and other instructions on the platforms that support it). It sets a global flag that is further /// checked by OpenCV functions. Since the flag is not checked in the inner OpenCV loops, it is only /// safe to call the function on the very top level in your application where you can be sure that no /// other OpenCV function is currently executed. /// /// By default, the optimized code is enabled unless you disable it in CMake. The current status can be /// retrieved using useOptimized. /// ## Parameters /// * onoff: The boolean flag specifying whether the optimized code should be used (onoff=true) /// or not (onoff=false). pub fn set_use_optimized(onoff: bool) -> Result<()> { unsafe { sys::cv_setUseOptimized_bool(onoff) }.into_result() } /// Finds the real roots of a cubic equation. /// /// The function solveCubic finds the real roots of a cubic equation: /// * if coeffs is a 4-element vector: ///  /// * if coeffs is a 3-element vector: ///  /// /// The roots are stored in the roots array. /// ## Parameters /// * coeffs: equation coefficients, an array of 3 or 4 elements. /// * roots: output array of real roots that has 1 or 3 elements. /// ## Returns /// number of real roots. It can be 0, 1 or 2. pub fn solve_cubic(coeffs: &dyn core::ToInputArray, roots: &mut dyn core::ToOutputArray) -> Result<i32> { input_array_arg!(coeffs); output_array_arg!(roots); unsafe { sys::cv_solveCubic__InputArray__OutputArray(coeffs.as_raw__InputArray(), roots.as_raw__OutputArray()) }.into_result() } /// Solve given (non-integer) linear programming problem using the Simplex Algorithm (Simplex Method). /// /// What we mean here by "linear programming problem" (or LP problem, for short) can be formulated as: /// ///  /// /// Where  is fixed `1`-by-`n` row-vector,  is fixed `m`-by-`n` matrix,  is fixed `m`-by-`1` /// column vector and  is an arbitrary `n`-by-`1` column vector, which satisfies the constraints. /// /// Simplex algorithm is one of many algorithms that are designed to handle this sort of problems /// efficiently. Although it is not optimal in theoretical sense (there exist algorithms that can solve /// any problem written as above in polynomial time, while simplex method degenerates to exponential /// time for some special cases), it is well-studied, easy to implement and is shown to work well for /// real-life purposes. /// /// The particular implementation is taken almost verbatim from **Introduction to Algorithms, third /// edition** by T. H. Cormen, C. E. Leiserson, R. L. Rivest and Clifford Stein. In particular, the /// Bland's rule <http://en.wikipedia.org/wiki/Bland%27s_rule> is used to prevent cycling. /// /// ## Parameters /// * Func: This row-vector corresponds to  in the LP problem formulation (see above). It should /// contain 32- or 64-bit floating point numbers. As a convenience, column-vector may be also submitted, /// in the latter case it is understood to correspond to . /// * Constr: `m`-by-`n+1` matrix, whose rightmost column corresponds to  in formulation above /// and the remaining to . It should contain 32- or 64-bit floating point numbers. /// * z: The solution will be returned here as a column-vector - it corresponds to  in the /// formulation above. It will contain 64-bit floating point numbers. /// ## Returns /// One of cv::SolveLPResult pub fn solve_lp(func: &core::Mat, constr: &core::Mat, z: &mut core::Mat) -> Result<i32> { unsafe { sys::cv_solveLP_Mat_Mat_Mat(func.as_raw_Mat(), constr.as_raw_Mat(), z.as_raw_Mat()) }.into_result() } /// Finds the real or complex roots of a polynomial equation. /// /// The function cv::solvePoly finds real and complex roots of a polynomial equation: ///  /// ## Parameters /// * coeffs: array of polynomial coefficients. /// * roots: output (complex) array of roots. /// * maxIters: maximum number of iterations the algorithm does. /// /// ## C++ default parameters /// * max_iters: 300 pub fn solve_poly(coeffs: &dyn core::ToInputArray, roots: &mut dyn core::ToOutputArray, max_iters: i32) -> Result<f64> { input_array_arg!(coeffs); output_array_arg!(roots); unsafe { sys::cv_solvePoly__InputArray__OutputArray_int(coeffs.as_raw__InputArray(), roots.as_raw__OutputArray(), max_iters) }.into_result() } /// Solves one or more linear systems or least-squares problems. /// /// The function cv::solve solves a linear system or least-squares problem (the /// latter is possible with SVD or QR methods, or by specifying the flag /// #DECOMP_NORMAL ): ///  /// /// If #DECOMP_LU or #DECOMP_CHOLESKY method is used, the function returns 1 /// if src1 (or  ) is non-singular. Otherwise, /// it returns 0. In the latter case, dst is not valid. Other methods find a /// pseudo-solution in case of a singular left-hand side part. /// /// /// Note: If you want to find a unity-norm solution of an under-defined /// singular system  , the function solve /// will not do the work. Use SVD::solveZ instead. /// /// ## Parameters /// * src1: input matrix on the left-hand side of the system. /// * src2: input matrix on the right-hand side of the system. /// * dst: output solution. /// * flags: solution (matrix inversion) method (#DecompTypes) /// ## See also /// invert, SVD, eigen /// /// ## C++ default parameters /// * flags: DECOMP_LU pub fn solve(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, flags: i32) -> Result<bool> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); unsafe { sys::cv_solve__InputArray__InputArray__OutputArray_int(src1.as_raw__InputArray(), src2.as_raw__InputArray(), dst.as_raw__OutputArray(), flags) }.into_result() } /// Sorts each row or each column of a matrix. /// /// The function cv::sortIdx sorts each matrix row or each matrix column in the /// ascending or descending order. So you should pass two operation flags to /// get desired behaviour. Instead of reordering the elements themselves, it /// stores the indices of sorted elements in the output array. For example: /// ```ignore /// Mat A = Mat::eye(3,3,CV_32F), B; /// sortIdx(A, B, SORT_EVERY_ROW + SORT_ASCENDING); /// // B will probably contain /// // (because of equal elements in A some permutations are possible): /// // [[1, 2, 0], [0, 2, 1], [0, 1, 2]] /// ``` /// /// ## Parameters /// * src: input single-channel array. /// * dst: output integer array of the same size as src. /// * flags: operation flags that could be a combination of cv::SortFlags /// ## See also /// sort, randShuffle pub fn sort_idx(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, flags: i32) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_sortIdx__InputArray__OutputArray_int(src.as_raw__InputArray(), dst.as_raw__OutputArray(), flags) }.into_result() } /// Sorts each row or each column of a matrix. /// /// The function cv::sort sorts each matrix row or each matrix column in /// ascending or descending order. So you should pass two operation flags to /// get desired behaviour. If you want to sort matrix rows or columns /// lexicographically, you can use STL std::sort generic function with the /// proper comparison predicate. /// /// ## Parameters /// * src: input single-channel array. /// * dst: output array of the same size and type as src. /// * flags: operation flags, a combination of #SortFlags /// ## See also /// sortIdx, randShuffle pub fn sort(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, flags: i32) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_sort__InputArray__OutputArray_int(src.as_raw__InputArray(), dst.as_raw__OutputArray(), flags) }.into_result() } /// Divides a multi-channel array into several single-channel arrays. /// /// The function cv::split splits a multi-channel array into separate single-channel arrays: ///  /// If you need to extract a single channel or do some other sophisticated channel permutation, use /// mixChannels . /// /// The following example demonstrates how to split a 3-channel matrix into 3 single channel matrices. /// @snippet snippets/core_split.cpp example /// /// ## Parameters /// * src: input multi-channel array. /// * mvbegin: output array; the number of arrays must match src.channels(); the arrays themselves are /// reallocated, if needed. /// ## See also /// merge, mixChannels, cvtColor /// /// ## Overloaded parameters /// /// * m: input multi-channel array. /// * mv: output vector of arrays; the arrays themselves are reallocated, if needed. pub fn split(m: &dyn core::ToInputArray, mv: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(m); output_array_arg!(mv); unsafe { sys::cv_split__InputArray__OutputArray(m.as_raw__InputArray(), mv.as_raw__OutputArray()) }.into_result() } /// Calculates a square root of array elements. /// /// The function cv::sqrt calculates a square root of each input array element. /// In case of multi-channel arrays, each channel is processed /// independently. The accuracy is approximately the same as of the built-in /// std::sqrt . /// ## Parameters /// * src: input floating-point array. /// * dst: output array of the same size and type as src. pub fn sqrt(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_sqrt__InputArray__OutputArray(src.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } /// Calculates the per-element difference between two arrays or array and a scalar. /// /// The function subtract calculates: /// - Difference between two arrays, when both input arrays have the same size and the same number of /// channels: ///  /// - Difference between an array and a scalar, when src2 is constructed from Scalar or has the same /// number of elements as `src1.channels()`: ///  /// - Difference between a scalar and an array, when src1 is constructed from Scalar or has the same /// number of elements as `src2.channels()`: ///  /// - The reverse difference between a scalar and an array in the case of `SubRS`: ///  /// where I is a multi-dimensional index of array elements. In case of multi-channel arrays, each /// channel is processed independently. /// /// The first function in the list above can be replaced with matrix expressions: /// ```ignore{.cpp} /// dst = src1 - src2; /// dst -= src1; // equivalent to subtract(dst, src1, dst); /// ``` /// /// The input arrays and the output array can all have the same or different depths. For example, you /// can subtract to 8-bit unsigned arrays and store the difference in a 16-bit signed array. Depth of /// the output array is determined by dtype parameter. In the second and third cases above, as well as /// in the first case, when src1.depth() == src2.depth(), dtype can be set to the default -1. In this /// case the output array will have the same depth as the input array, be it src1, src2 or both. /// /// Note: Saturation is not applied when the output array has the depth CV_32S. You may even get /// result of an incorrect sign in the case of overflow. /// ## Parameters /// * src1: first input array or a scalar. /// * src2: second input array or a scalar. /// * dst: output array of the same size and the same number of channels as the input array. /// * mask: optional operation mask; this is an 8-bit single channel array that specifies elements /// of the output array to be changed. /// * dtype: optional depth of the output array /// ## See also /// add, addWeighted, scaleAdd, Mat::convertTo /// /// ## C++ default parameters /// * mask: noArray() /// * dtype: -1 pub fn subtract(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, mask: &dyn core::ToInputArray, dtype: i32) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); input_array_arg!(mask); unsafe { sys::cv_subtract__InputArray__InputArray__OutputArray__InputArray_int(src1.as_raw__InputArray(), src2.as_raw__InputArray(), dst.as_raw__OutputArray(), mask.as_raw__InputArray(), dtype) }.into_result() } /// Calculates the sum of array elements. /// /// The function cv::sum calculates and returns the sum of array elements, /// independently for each channel. /// ## Parameters /// * src: input array that must have from 1 to 4 channels. /// ## See also /// countNonZero, mean, meanStdDev, norm, minMaxLoc, reduce pub fn sum(src: &dyn core::ToInputArray) -> Result<core::Scalar> { input_array_arg!(src); unsafe { sys::cv_sum__InputArray(src.as_raw__InputArray()) }.into_result() } /// Swaps two matrices pub fn swap(a: &mut core::Mat, b: &mut core::Mat) -> Result<()> { unsafe { sys::cv_swap_Mat_Mat(a.as_raw_Mat(), b.as_raw_Mat()) }.into_result() } /// Swaps two matrices /// /// ## Overloaded parameters pub fn swap_umat(a: &mut core::UMat, b: &mut core::UMat) -> Result<()> { unsafe { sys::cv_swap_UMat_UMat(a.as_raw_UMat(), b.as_raw_UMat()) }.into_result() } /// /// ## C++ default parameters /// * suffix: 0 pub fn tempfile(suffix: &str) -> Result<String> { string_arg!(suffix); unsafe { sys::cv_tempfile_const_char_X(suffix.as_ptr()) }.into_result().map(crate::templ::receive_string_mut) } /// Returns the trace of a matrix. /// /// The function cv::trace returns the sum of the diagonal elements of the /// matrix mtx . ///  /// ## Parameters /// * mtx: input matrix. pub fn trace(mtx: &dyn core::ToInputArray) -> Result<core::Scalar> { input_array_arg!(mtx); unsafe { sys::cv_trace__InputArray(mtx.as_raw__InputArray()) }.into_result() } /// Performs the matrix transformation of every array element. /// /// The function cv::transform performs the matrix transformation of every /// element of the array src and stores the results in dst : ///  /// (when m.cols=src.channels() ), or ///  /// (when m.cols=src.channels()+1 ) /// /// Every element of the N -channel array src is interpreted as N -element /// vector that is transformed using the M x N or M x (N+1) matrix m to /// M-element vector - the corresponding element of the output array dst . /// /// The function may be used for geometrical transformation of /// N -dimensional points, arbitrary linear color space transformation (such /// as various kinds of RGB to YUV transforms), shuffling the image /// channels, and so forth. /// ## Parameters /// * src: input array that must have as many channels (1 to 4) as /// m.cols or m.cols-1. /// * dst: output array of the same size and depth as src; it has as /// many channels as m.rows. /// * m: transformation 2x2 or 2x3 floating-point matrix. /// ## See also /// perspectiveTransform, getAffineTransform, estimateAffine2D, warpAffine, warpPerspective pub fn transform(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray, m: &dyn core::ToInputArray) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); input_array_arg!(m); unsafe { sys::cv_transform__InputArray__OutputArray__InputArray(src.as_raw__InputArray(), dst.as_raw__OutputArray(), m.as_raw__InputArray()) }.into_result() } /// Transposes a matrix. /// /// The function cv::transpose transposes the matrix src : ///  /// /// Note: No complex conjugation is done in case of a complex matrix. It /// should be done separately if needed. /// ## Parameters /// * src: input array. /// * dst: output array of the same type as src. pub fn transpose(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_transpose__InputArray__OutputArray(src.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } /// Returns string of cv::Mat depth value: CV_8UC3 -> "CV_8UC3" or "<invalid type>" pub fn type_to_string(_type: i32) -> Result<String> { unsafe { sys::cv_typeToString_int(_type) }.into_result().map(crate::templ::receive_string) } pub fn use_openvx() -> Result<bool> { unsafe { sys::cv_useOpenVX() }.into_result() } /// Returns the status of optimized code usage. /// /// The function returns true if the optimized code is enabled. Otherwise, it returns false. pub fn use_optimized() -> Result<bool> { unsafe { sys::cv_useOptimized() }.into_result() } pub fn dump_input_array_of_arrays(argument: &dyn core::ToInputArray) -> Result<String> { input_array_arg!(argument); unsafe { sys::cv_utils_dumpInputArrayOfArrays__InputArray(argument.as_raw__InputArray()) }.into_result().map(crate::templ::receive_string_mut) } pub fn dump_input_array(argument: &dyn core::ToInputArray) -> Result<String> { input_array_arg!(argument); unsafe { sys::cv_utils_dumpInputArray__InputArray(argument.as_raw__InputArray()) }.into_result().map(crate::templ::receive_string_mut) } pub fn dump_input_output_array_of_arrays(argument: &mut dyn core::ToInputOutputArray) -> Result<String> { input_output_array_arg!(argument); unsafe { sys::cv_utils_dumpInputOutputArrayOfArrays__InputOutputArray(argument.as_raw__InputOutputArray()) }.into_result().map(crate::templ::receive_string_mut) } pub fn dump_input_output_array(argument: &mut dyn core::ToInputOutputArray) -> Result<String> { input_output_array_arg!(argument); unsafe { sys::cv_utils_dumpInputOutputArray__InputOutputArray(argument.as_raw__InputOutputArray()) }.into_result().map(crate::templ::receive_string_mut) } pub fn get_thread_id() -> Result<i32> { unsafe { sys::cv_utils_getThreadID() }.into_result() } /// Get global logging level pub fn get_log_level() -> Result<core::LogLevel> { unsafe { sys::cv_utils_logging_getLogLevel() }.into_result() } /// Write log message pub fn write_log_message(log_level: core::LogLevel, message: &str) -> Result<()> { string_arg!(message); unsafe { sys::cv_utils_logging_internal_writeLogMessage_LogLevel_const_char_X(log_level, message.as_ptr()) }.into_result() } /// Set global logging level /// ## Returns /// previous logging level pub fn set_log_level(log_level: core::LogLevel) -> Result<core::LogLevel> { unsafe { sys::cv_utils_logging_setLogLevel_LogLevel(log_level) }.into_result() } pub fn test_async_array(argument: &dyn core::ToInputArray) -> Result<core::AsyncArray> { input_array_arg!(argument); unsafe { sys::cv_utils_testAsyncArray__InputArray(argument.as_raw__InputArray()) }.into_result().map(|ptr| core::AsyncArray { ptr }) } pub fn test_async_exception() -> Result<core::AsyncArray> { unsafe { sys::cv_utils_testAsyncException() }.into_result().map(|ptr| core::AsyncArray { ptr }) } /// Converts VASurfaceID object to OutputArray. /// ## Parameters /// * display: - VADisplay object. /// * surface: - source VASurfaceID object. /// * size: - size of image represented by VASurfaceID object. /// * dst: - destination OutputArray. pub fn convert_from_va_surface(display: &mut c_void, surface: u32, size: core::Size, dst: &mut dyn core::ToOutputArray) -> Result<()> { output_array_arg!(dst); unsafe { sys::cv_va_intel_convertFromVASurface_void_X_unsigned_int_Size__OutputArray(display, surface, size, dst.as_raw__OutputArray()) }.into_result() } /// Converts InputArray to VASurfaceID object. /// ## Parameters /// * display: - VADisplay object. /// * src: - source InputArray. /// * surface: - destination VASurfaceID object. /// * size: - size of image represented by VASurfaceID object. pub fn convert_to_va_surface(display: &mut c_void, src: &dyn core::ToInputArray, surface: u32, size: core::Size) -> Result<()> { input_array_arg!(src); unsafe { sys::cv_va_intel_convertToVASurface_void_X__InputArray_unsigned_int_Size(display, src.as_raw__InputArray(), surface, size) }.into_result() } /// Applies vertical concatenation to given matrices. /// /// The function vertically concatenates two or more cv::Mat matrices (with the same number of cols). /// ```ignore{.cpp} /// cv::Mat matArray[] = { cv::Mat(1, 4, CV_8UC1, cv::Scalar(1)), /// cv::Mat(1, 4, CV_8UC1, cv::Scalar(2)), /// cv::Mat(1, 4, CV_8UC1, cv::Scalar(3)),}; /// /// cv::Mat out; /// cv::vconcat( matArray, 3, out ); /// //out: /// //[1, 1, 1, 1; /// // 2, 2, 2, 2; /// // 3, 3, 3, 3] /// ``` /// /// ## Parameters /// * src: input array or vector of matrices. all of the matrices must have the same number of cols and the same depth. /// * nsrc: number of matrices in src. /// * dst: output array. It has the same number of cols and depth as the src, and the sum of rows of the src. /// ## See also /// cv::hconcat(const Mat*, size_t, OutputArray), cv::hconcat(InputArrayOfArrays, OutputArray) and cv::hconcat(InputArray, InputArray, OutputArray) /// /// ## Overloaded parameters /// /// ```ignore{.cpp} /// cv::Mat_<float> A = (cv::Mat_<float>(3, 2) << 1, 7, /// 2, 8, /// 3, 9); /// cv::Mat_<float> B = (cv::Mat_<float>(3, 2) << 4, 10, /// 5, 11, /// 6, 12); /// /// cv::Mat C; /// cv::vconcat(A, B, C); /// //C: /// //[1, 7; /// // 2, 8; /// // 3, 9; /// // 4, 10; /// // 5, 11; /// // 6, 12] /// ``` /// /// * src1: first input array to be considered for vertical concatenation. /// * src2: second input array to be considered for vertical concatenation. /// * dst: output array. It has the same number of cols and depth as the src1 and src2, and the sum of rows of the src1 and src2. pub fn vconcat2(src1: &dyn core::ToInputArray, src2: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src1); input_array_arg!(src2); output_array_arg!(dst); unsafe { sys::cv_vconcat__InputArray__InputArray__OutputArray(src1.as_raw__InputArray(), src2.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } /// Applies vertical concatenation to given matrices. /// /// The function vertically concatenates two or more cv::Mat matrices (with the same number of cols). /// ```ignore{.cpp} /// cv::Mat matArray[] = { cv::Mat(1, 4, CV_8UC1, cv::Scalar(1)), /// cv::Mat(1, 4, CV_8UC1, cv::Scalar(2)), /// cv::Mat(1, 4, CV_8UC1, cv::Scalar(3)),}; /// /// cv::Mat out; /// cv::vconcat( matArray, 3, out ); /// //out: /// //[1, 1, 1, 1; /// // 2, 2, 2, 2; /// // 3, 3, 3, 3] /// ``` /// /// ## Parameters /// * src: input array or vector of matrices. all of the matrices must have the same number of cols and the same depth. /// * nsrc: number of matrices in src. /// * dst: output array. It has the same number of cols and depth as the src, and the sum of rows of the src. /// ## See also /// cv::hconcat(const Mat*, size_t, OutputArray), cv::hconcat(InputArrayOfArrays, OutputArray) and cv::hconcat(InputArray, InputArray, OutputArray) /// /// ## Overloaded parameters /// /// ```ignore{.cpp} /// std::vector<cv::Mat> matrices = { cv::Mat(1, 4, CV_8UC1, cv::Scalar(1)), /// cv::Mat(1, 4, CV_8UC1, cv::Scalar(2)), /// cv::Mat(1, 4, CV_8UC1, cv::Scalar(3)),}; /// /// cv::Mat out; /// cv::vconcat( matrices, out ); /// //out: /// //[1, 1, 1, 1; /// // 2, 2, 2, 2; /// // 3, 3, 3, 3] /// ``` /// /// * src: input array or vector of matrices. all of the matrices must have the same number of cols and the same depth /// * dst: output array. It has the same number of cols and depth as the src, and the sum of rows of the src. /// same depth. pub fn vconcat(src: &dyn core::ToInputArray, dst: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(src); output_array_arg!(dst); unsafe { sys::cv_vconcat__InputArray__OutputArray(src.as_raw__InputArray(), dst.as_raw__OutputArray()) }.into_result() } pub fn write_scalar_str(fs: &mut core::FileStorage, value: &str) -> Result<()> { string_arg!(value); unsafe { sys::cv_writeScalar_FileStorage_String(fs.as_raw_FileStorage(), value.as_ptr()) }.into_result() } pub fn write_scalar_f64(fs: &mut core::FileStorage, value: f64) -> Result<()> { unsafe { sys::cv_writeScalar_FileStorage_double(fs.as_raw_FileStorage(), value) }.into_result() } pub fn write_scalar_f32(fs: &mut core::FileStorage, value: f32) -> Result<()> { unsafe { sys::cv_writeScalar_FileStorage_float(fs.as_raw_FileStorage(), value) }.into_result() } pub fn write_scalar_i32(fs: &mut core::FileStorage, value: i32) -> Result<()> { unsafe { sys::cv_writeScalar_FileStorage_int(fs.as_raw_FileStorage(), value) }.into_result() } pub fn write_dmatch(fs: &mut core::FileStorage, m: core::DMatch) -> Result<()> { unsafe { sys::cv_write_FileStorage_DMatch(fs.as_raw_FileStorage(), m) }.into_result() } pub fn write_keypoint(fs: &mut core::FileStorage, kpt: core::KeyPoint) -> Result<()> { unsafe { sys::cv_write_FileStorage_KeyPoint(fs.as_raw_FileStorage(), kpt) }.into_result() } pub fn write_range(fs: &mut core::FileStorage, r: &core::Range) -> Result<()> { unsafe { sys::cv_write_FileStorage_Range(fs.as_raw_FileStorage(), r.as_raw_Range()) }.into_result() } pub fn write_dmatch_1(fs: &mut core::FileStorage, name: &str, m: core::DMatch) -> Result<()> { string_arg!(name); unsafe { sys::cv_write_FileStorage_String_DMatch(fs.as_raw_FileStorage(), name.as_ptr(), m) }.into_result() } pub fn write_keypoint_1(fs: &mut core::FileStorage, name: &str, kpt: core::KeyPoint) -> Result<()> { string_arg!(name); unsafe { sys::cv_write_FileStorage_String_KeyPoint(fs.as_raw_FileStorage(), name.as_ptr(), kpt) }.into_result() } pub fn write_mat(fs: &mut core::FileStorage, name: &str, value: &core::Mat) -> Result<()> { string_arg!(name); unsafe { sys::cv_write_FileStorage_String_Mat(fs.as_raw_FileStorage(), name.as_ptr(), value.as_raw_Mat()) }.into_result() } pub fn write_range_1(fs: &mut core::FileStorage, name: &str, r: &core::Range) -> Result<()> { string_arg!(name); unsafe { sys::cv_write_FileStorage_String_Range(fs.as_raw_FileStorage(), name.as_ptr(), r.as_raw_Range()) }.into_result() } pub fn write_sparsemat(fs: &mut core::FileStorage, name: &str, value: &core::SparseMat) -> Result<()> { string_arg!(name); unsafe { sys::cv_write_FileStorage_String_SparseMat(fs.as_raw_FileStorage(), name.as_ptr(), value.as_raw_SparseMat()) }.into_result() } pub fn write_str(fs: &mut core::FileStorage, name: &str, value: &str) -> Result<()> { string_arg!(name); string_arg!(value); unsafe { sys::cv_write_FileStorage_String_String(fs.as_raw_FileStorage(), name.as_ptr(), value.as_ptr()) }.into_result() } pub fn write_dmatch_vec(fs: &mut core::FileStorage, name: &str, value: &types::VectorOfDMatch) -> Result<()> { string_arg!(name); unsafe { sys::cv_write_FileStorage_String_VectorOfDMatch(fs.as_raw_FileStorage(), name.as_ptr(), value.as_raw_VectorOfDMatch()) }.into_result() } pub fn write_keypoint_vec(fs: &mut core::FileStorage, name: &str, value: &types::VectorOfKeyPoint) -> Result<()> { string_arg!(name); unsafe { sys::cv_write_FileStorage_String_VectorOfKeyPoint(fs.as_raw_FileStorage(), name.as_ptr(), value.as_raw_VectorOfKeyPoint()) }.into_result() } pub fn write_f64(fs: &mut core::FileStorage, name: &str, value: f64) -> Result<()> { string_arg!(name); unsafe { sys::cv_write_FileStorage_String_double(fs.as_raw_FileStorage(), name.as_ptr(), value) }.into_result() } pub fn write_f32(fs: &mut core::FileStorage, name: &str, value: f32) -> Result<()> { string_arg!(name); unsafe { sys::cv_write_FileStorage_String_float(fs.as_raw_FileStorage(), name.as_ptr(), value) }.into_result() } /// @relates cv::FileStorage pub fn write_i32(fs: &mut core::FileStorage, name: &str, value: i32) -> Result<()> { string_arg!(name); unsafe { sys::cv_write_FileStorage_String_int(fs.as_raw_FileStorage(), name.as_ptr(), value) }.into_result() } pub fn write_dmatch_vec_1(fs: &mut core::FileStorage, vec: &types::VectorOfDMatch) -> Result<()> { unsafe { sys::cv_write_FileStorage_VectorOfDMatch(fs.as_raw_FileStorage(), vec.as_raw_VectorOfDMatch()) }.into_result() } pub fn write_keypoint_vec_1(fs: &mut core::FileStorage, vec: &types::VectorOfKeyPoint) -> Result<()> { unsafe { sys::cv_write_FileStorage_VectorOfKeyPoint(fs.as_raw_FileStorage(), vec.as_raw_VectorOfKeyPoint()) }.into_result() } // Generating impl for trait core::Algorithm /// This is a base class for all more or less complex algorithms in OpenCV /// /// especially for classes of algorithms, for which there can be multiple implementations. The examples /// are stereo correspondence (for which there are algorithms like block matching, semi-global block /// matching, graph-cut etc.), background subtraction (which can be done using mixture-of-gaussians /// models, codebook-based algorithm etc.), optical flow (block matching, Lucas-Kanade, Horn-Schunck /// etc.). /// /// Here is example of SimpleBlobDetector use in your application via Algorithm interface: /// @snippet snippets/core_various.cpp Algorithm pub trait AlgorithmTrait { #[inline(always)] fn as_raw_Algorithm(&self) -> *mut c_void; /// Clears the algorithm state fn clear(&mut self) -> Result<()> { unsafe { sys::cv_Algorithm_clear(self.as_raw_Algorithm()) }.into_result() } /// Stores algorithm parameters in a file storage fn write(&self, fs: &mut core::FileStorage) -> Result<()> { unsafe { sys::cv_Algorithm_write_const_FileStorage(self.as_raw_Algorithm(), fs.as_raw_FileStorage()) }.into_result() } /// simplified API for language bindings /// /// ## C++ default parameters /// * name: String() fn write_1(&self, fs: &types::PtrOfFileStorage, name: &str) -> Result<()> { string_arg!(name); unsafe { sys::cv_Algorithm_write_const_PtrOfFileStorage_String(self.as_raw_Algorithm(), fs.as_raw_PtrOfFileStorage(), name.as_ptr()) }.into_result() } /// Reads algorithm parameters from a file storage fn read(&mut self, _fn: &core::FileNode) -> Result<()> { unsafe { sys::cv_Algorithm_read_FileNode(self.as_raw_Algorithm(), _fn.as_raw_FileNode()) }.into_result() } /// Returns true if the Algorithm is empty (e.g. in the very beginning or after unsuccessful read fn empty(&self) -> Result<bool> { unsafe { sys::cv_Algorithm_empty_const(self.as_raw_Algorithm()) }.into_result() } /// Saves the algorithm to a file. /// In order to make this method work, the derived class must implement Algorithm::write(FileStorage& fs). fn save(&self, filename: &str) -> Result<()> { string_arg!(filename); unsafe { sys::cv_Algorithm_save_const_String(self.as_raw_Algorithm(), filename.as_ptr()) }.into_result() } /// Returns the algorithm string identifier. /// This string is used as top level xml/yml node tag when the object is saved to a file or string. fn get_default_name(&self) -> Result<String> { unsafe { sys::cv_Algorithm_getDefaultName_const(self.as_raw_Algorithm()) }.into_result().map(crate::templ::receive_string_mut) } } // boxed class cv::Algorithm /// This is a base class for all more or less complex algorithms in OpenCV /// /// especially for classes of algorithms, for which there can be multiple implementations. The examples /// are stereo correspondence (for which there are algorithms like block matching, semi-global block /// matching, graph-cut etc.), background subtraction (which can be done using mixture-of-gaussians /// models, codebook-based algorithm etc.), optical flow (block matching, Lucas-Kanade, Horn-Schunck /// etc.). /// /// Here is example of SimpleBlobDetector use in your application via Algorithm interface: /// @snippet snippets/core_various.cpp Algorithm pub struct Algorithm { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Algorithm { fn drop(&mut self) { unsafe { sys::cv_Algorithm_delete(self.ptr) }; } } impl Algorithm { #[inline(always)] pub fn as_raw_Algorithm(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Algorithm {} impl core::AlgorithmTrait for Algorithm { #[inline(always)] fn as_raw_Algorithm(&self) -> *mut c_void { self.ptr } } impl Algorithm { pub fn default() -> Result<core::Algorithm> { unsafe { sys::cv_Algorithm_Algorithm() }.into_result().map(|ptr| core::Algorithm { ptr }) } } // boxed class cv::AsyncArray /// Returns result of asynchronous operations /// /// Object has attached asynchronous state. /// Assignment operator doesn't clone asynchronous state (it is shared between all instances). /// /// Result can be fetched via get() method only once. pub struct AsyncArray { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for AsyncArray { fn drop(&mut self) { unsafe { sys::cv_AsyncArray_delete(self.ptr) }; } } impl AsyncArray { #[inline(always)] pub fn as_raw_AsyncArray(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for AsyncArray {} impl AsyncArray { pub fn default() -> Result<core::AsyncArray> { unsafe { sys::cv_AsyncArray_AsyncArray() }.into_result().map(|ptr| core::AsyncArray { ptr }) } pub fn copy(o: &core::AsyncArray) -> Result<core::AsyncArray> { unsafe { sys::cv_AsyncArray_AsyncArray_AsyncArray(o.as_raw_AsyncArray()) }.into_result().map(|ptr| core::AsyncArray { ptr }) } pub fn release(&mut self) -> Result<()> { unsafe { sys::cv_AsyncArray_release(self.as_raw_AsyncArray()) }.into_result() } /// Fetch the result. /// ## Parameters /// * dst: [out] destination array /// /// Waits for result until container has valid result. /// Throws exception if exception was stored as a result. /// /// Throws exception on invalid container state. /// /// /// Note: Result or stored exception can be fetched only once. pub fn get(&self, dst: &mut dyn core::ToOutputArray) -> Result<()> { output_array_arg!(dst); unsafe { sys::cv_AsyncArray_get_const__OutputArray(self.as_raw_AsyncArray(), dst.as_raw__OutputArray()) }.into_result() } /// Retrieving the result with timeout /// ## Parameters /// * dst: [out] destination array /// * timeoutNs: timeout in nanoseconds, -1 for infinite wait /// /// ## Returns /// true if result is ready, false if the timeout has expired /// /// /// Note: Result or stored exception can be fetched only once. pub fn get_with_timeout(&self, dst: &mut dyn core::ToOutputArray, timeout_ns: i64) -> Result<bool> { output_array_arg!(dst); unsafe { sys::cv_AsyncArray_get_const__OutputArray_int64(self.as_raw_AsyncArray(), dst.as_raw__OutputArray(), timeout_ns) }.into_result() } pub fn get_with_timeout_f64(&self, dst: &mut dyn core::ToOutputArray, timeout_ns: f64) -> Result<bool> { output_array_arg!(dst); unsafe { sys::cv_AsyncArray_get_const__OutputArray_double(self.as_raw_AsyncArray(), dst.as_raw__OutputArray(), timeout_ns) }.into_result() } pub fn wait_for(&self, timeout_ns: i64) -> Result<bool> { unsafe { sys::cv_AsyncArray_wait_for_const_int64(self.as_raw_AsyncArray(), timeout_ns) }.into_result() } pub fn wait_for_f64(&self, timeout_ns: f64) -> Result<bool> { unsafe { sys::cv_AsyncArray_wait_for_const_double(self.as_raw_AsyncArray(), timeout_ns) }.into_result() } pub fn valid(&self) -> Result<bool> { unsafe { sys::cv_AsyncArray_valid_const(self.as_raw_AsyncArray()) }.into_result() } } // boxed class cv::AsyncPromise /// Provides result of asynchronous operations pub struct AsyncPromise { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for AsyncPromise { fn drop(&mut self) { unsafe { sys::cv_AsyncPromise_delete(self.ptr) }; } } impl AsyncPromise { #[inline(always)] pub fn as_raw_AsyncPromise(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for AsyncPromise {} impl AsyncPromise { pub fn default() -> Result<core::AsyncPromise> { unsafe { sys::cv_AsyncPromise_AsyncPromise() }.into_result().map(|ptr| core::AsyncPromise { ptr }) } pub fn copy(o: &core::AsyncPromise) -> Result<core::AsyncPromise> { unsafe { sys::cv_AsyncPromise_AsyncPromise_AsyncPromise(o.as_raw_AsyncPromise()) }.into_result().map(|ptr| core::AsyncPromise { ptr }) } pub fn release(&mut self) -> Result<()> { unsafe { sys::cv_AsyncPromise_release(self.as_raw_AsyncPromise()) }.into_result() } /// Returns associated AsyncArray /// /// Note: Can be called once pub fn get_array_result(&mut self) -> Result<core::AsyncArray> { unsafe { sys::cv_AsyncPromise_getArrayResult(self.as_raw_AsyncPromise()) }.into_result().map(|ptr| core::AsyncArray { ptr }) } /// Stores asynchronous result. /// ## Parameters /// * value: result pub fn set_value(&mut self, value: &dyn core::ToInputArray) -> Result<()> { input_array_arg!(value); unsafe { sys::cv_AsyncPromise_setValue__InputArray(self.as_raw_AsyncPromise(), value.as_raw__InputArray()) }.into_result() } pub fn _get_impl(&self) -> Result<&mut c_void> { unsafe { sys::cv_AsyncPromise__getImpl_const(self.as_raw_AsyncPromise()) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } } // boxed class cv::AutoLock pub struct AutoLock { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for AutoLock { fn drop(&mut self) { unsafe { sys::cv_AutoLock_delete(self.ptr) }; } } impl AutoLock { #[inline(always)] pub fn as_raw_AutoLock(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for AutoLock {} // Generating impl for trait core::BufferPoolController pub trait BufferPoolController { #[inline(always)] fn as_raw_BufferPoolController(&self) -> *mut c_void; fn get_reserved_size(&self) -> Result<size_t> { unsafe { sys::cv_BufferPoolController_getReservedSize_const(self.as_raw_BufferPoolController()) }.into_result() } fn get_max_reserved_size(&self) -> Result<size_t> { unsafe { sys::cv_BufferPoolController_getMaxReservedSize_const(self.as_raw_BufferPoolController()) }.into_result() } fn set_max_reserved_size(&mut self, size: size_t) -> Result<()> { unsafe { sys::cv_BufferPoolController_setMaxReservedSize_size_t(self.as_raw_BufferPoolController(), size) }.into_result() } fn free_all_reserved_buffers(&mut self) -> Result<()> { unsafe { sys::cv_BufferPoolController_freeAllReservedBuffers(self.as_raw_BufferPoolController()) }.into_result() } } // boxed class cv::CommandLineParser /// Designed for command line parsing /// /// The sample below demonstrates how to use CommandLineParser: /// ```ignore /// CommandLineParser parser(argc, argv, keys); /// parser.about("Application name v1.0.0"); /// /// if (parser.has("help")) /// { /// parser.printMessage(); /// return 0; /// } /// /// int N = parser.get<int>("N"); /// double fps = parser.get<double>("fps"); /// String path = parser.get<String>("path"); /// /// use_time_stamp = parser.has("timestamp"); /// /// String img1 = parser.get<String>(0); /// String img2 = parser.get<String>(1); /// /// int repeat = parser.get<int>(2); /// /// if (!parser.check()) /// { /// parser.printErrors(); /// return 0; /// } /// ``` /// /// /// ### Keys syntax /// /// The keys parameter is a string containing several blocks, each one is enclosed in curly braces and /// describes one argument. Each argument contains three parts separated by the `|` symbol: /// /// -# argument names is a space-separated list of option synonyms (to mark argument as positional, prefix it with the `@` symbol) /// -# default value will be used if the argument was not provided (can be empty) /// -# help message (can be empty) /// /// For example: /// /// ```ignore{.cpp} /// const String keys = /// "{help h usage ? | | print this message }" /// "{@image1 | | image1 for compare }" /// "{@image2 |<none>| image2 for compare }" /// "{@repeat |1 | number }" /// "{path |. | path to file }" /// "{fps | -1.0 | fps for output video }" /// "{N count |100 | count of objects }" /// "{ts timestamp | | use time stamp }" /// ; /// } /// ``` /// /// /// Note that there are no default values for `help` and `timestamp` so we can check their presence using the `has()` method. /// Arguments with default values are considered to be always present. Use the `get()` method in these cases to check their /// actual value instead. /// /// String keys like `get<String>("@image1")` return the empty string `""` by default - even with an empty default value. /// Use the special `<none>` default value to enforce that the returned string must not be empty. (like in `get<String>("@image2")`) /// /// ### Usage /// /// For the described keys: /// /// ```ignore{.sh} /// # Good call (3 positional parameters: image1, image2 and repeat; N is 200, ts is true) /// $ ./app -N=200 1.png 2.jpg 19 -ts /// /// # Bad call /// $ ./app -fps=aaa /// ERRORS: /// Parameter 'fps': can not convert: [aaa] to [double] /// ``` pub struct CommandLineParser { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for CommandLineParser { fn drop(&mut self) { unsafe { sys::cv_CommandLineParser_delete(self.ptr) }; } } impl CommandLineParser { #[inline(always)] pub fn as_raw_CommandLineParser(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for CommandLineParser {} impl CommandLineParser { /// Copy constructor pub fn copy(parser: &core::CommandLineParser) -> Result<core::CommandLineParser> { unsafe { sys::cv_CommandLineParser_CommandLineParser_CommandLineParser(parser.as_raw_CommandLineParser()) }.into_result().map(|ptr| core::CommandLineParser { ptr }) } /// Returns application path /// /// This method returns the path to the executable from the command line (`argv[0]`). /// /// For example, if the application has been started with such a command: /// ```ignore{.sh} /// $ ./bin/my-executable /// ``` /// /// this method will return `./bin`. pub fn get_path_to_application(&self) -> Result<String> { unsafe { sys::cv_CommandLineParser_getPathToApplication_const(self.as_raw_CommandLineParser()) }.into_result().map(crate::templ::receive_string_mut) } /// Check if field was provided in the command line /// /// ## Parameters /// * name: argument name to check pub fn has(&self, name: &str) -> Result<bool> { string_arg!(name); unsafe { sys::cv_CommandLineParser_has_const_String(self.as_raw_CommandLineParser(), name.as_ptr()) }.into_result() } /// Check for parsing errors /// /// Returns false if error occurred while accessing the parameters (bad conversion, missing arguments, /// etc.). Call @ref printErrors to print error messages list. pub fn check(&self) -> Result<bool> { unsafe { sys::cv_CommandLineParser_check_const(self.as_raw_CommandLineParser()) }.into_result() } /// Set the about message /// /// The about message will be shown when @ref printMessage is called, right before arguments table. pub fn about(&mut self, message: &str) -> Result<()> { string_arg!(message); unsafe { sys::cv_CommandLineParser_about_String(self.as_raw_CommandLineParser(), message.as_ptr()) }.into_result() } /// Print help message /// /// This method will print standard help message containing the about message and arguments description. /// /// ## See also /// about pub fn print_message(&self) -> Result<()> { unsafe { sys::cv_CommandLineParser_printMessage_const(self.as_raw_CommandLineParser()) }.into_result() } /// Print list of errors occurred /// /// ## See also /// check pub fn print_errors(&self) -> Result<()> { unsafe { sys::cv_CommandLineParser_printErrors_const(self.as_raw_CommandLineParser()) }.into_result() } } // boxed class cv::ConjGradSolver /// This class is used to perform the non-linear non-constrained minimization of a function /// with known gradient, /// /// defined on an *n*-dimensional Euclidean space, using the **Nonlinear Conjugate Gradient method**. /// The implementation was done based on the beautifully clear explanatory article [An Introduction to /// the Conjugate Gradient Method Without the Agonizing /// Pain](http://www.cs.cmu.edu/~quake-papers/painless-conjugate-gradient.pdf) by Jonathan Richard /// Shewchuk. The method can be seen as an adaptation of a standard Conjugate Gradient method (see, for /// example <http://en.wikipedia.org/wiki/Conjugate_gradient_method>) for numerically solving the /// systems of linear equations. /// /// It should be noted, that this method, although deterministic, is rather a heuristic method and /// therefore may converge to a local minima, not necessary a global one. What is even more disastrous, /// most of its behaviour is ruled by gradient, therefore it essentially cannot distinguish between /// local minima and maxima. Therefore, if it starts sufficiently near to the local maximum, it may /// converge to it. Another obvious restriction is that it should be possible to compute the gradient of /// a function at any point, thus it is preferable to have analytic expression for gradient and /// computational burden should be born by the user. /// /// The latter responsibility is accomplished via the getGradient method of a /// MinProblemSolver::Function interface (which represents function being optimized). This method takes /// point a point in *n*-dimensional space (first argument represents the array of coordinates of that /// point) and compute its gradient (it should be stored in the second argument as an array). /// /// /// Note: class ConjGradSolver thus does not add any new methods to the basic MinProblemSolver interface. /// /// /// Note: term criteria should meet following condition: /// ```ignore /// termcrit.type == (TermCriteria::MAX_ITER + TermCriteria::EPS) && termcrit.epsilon > 0 && termcrit.maxCount > 0 /// // or /// termcrit.type == TermCriteria::MAX_ITER) && termcrit.maxCount > 0 /// ``` pub struct ConjGradSolver { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for ConjGradSolver { fn drop(&mut self) { unsafe { sys::cv_ConjGradSolver_delete(self.ptr) }; } } impl ConjGradSolver { #[inline(always)] pub fn as_raw_ConjGradSolver(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for ConjGradSolver {} impl core::AlgorithmTrait for ConjGradSolver { #[inline(always)] fn as_raw_Algorithm(&self) -> *mut c_void { self.ptr } } impl core::MinProblemSolver for ConjGradSolver { #[inline(always)] fn as_raw_MinProblemSolver(&self) -> *mut c_void { self.ptr } } impl ConjGradSolver { /// This function returns the reference to the ready-to-use ConjGradSolver object. /// /// All the parameters are optional, so this procedure can be called even without parameters at /// all. In this case, the default values will be used. As default value for terminal criteria are /// the only sensible ones, MinProblemSolver::setFunction() should be called upon the obtained /// object, if the function was not given to create(). Otherwise, the two ways (submit it to /// create() or miss it out and call the MinProblemSolver::setFunction()) are absolutely equivalent /// (and will drop the same errors in the same way, should invalid input be detected). /// ## Parameters /// * f: Pointer to the function that will be minimized, similarly to the one you submit via /// MinProblemSolver::setFunction. /// * termcrit: Terminal criteria to the algorithm, similarly to the one you submit via /// MinProblemSolver::setTermCriteria. /// /// ## C++ default parameters /// * f: Ptr<ConjGradSolver::Function>() /// * termcrit: TermCriteria(TermCriteria::MAX_ITER+TermCriteria::EPS,5000,0.000001) pub fn create(f: &types::PtrOfFunction, termcrit: &core::TermCriteria) -> Result<types::PtrOfConjGradSolver> { unsafe { sys::cv_ConjGradSolver_create_PtrOfFunction_TermCriteria(f.as_raw_PtrOfFunction(), termcrit.as_raw_TermCriteria()) }.into_result().map(|ptr| types::PtrOfConjGradSolver { ptr }) } } impl DMatch { pub fn default() -> Result<core::DMatch> { unsafe { sys::cv_DMatch_DMatch() }.into_result() } pub fn new(_query_idx: i32, _train_idx: i32, _distance: f32) -> Result<core::DMatch> { unsafe { sys::cv_DMatch_DMatch_int_int_float(_query_idx, _train_idx, _distance) }.into_result() } pub fn new_index(_query_idx: i32, _train_idx: i32, _img_idx: i32, _distance: f32) -> Result<core::DMatch> { unsafe { sys::cv_DMatch_DMatch_int_int_int_float(_query_idx, _train_idx, _img_idx, _distance) }.into_result() } } // Generating impl for trait core::DownhillSolver /// This class is used to perform the non-linear non-constrained minimization of a function, /// /// defined on an `n`-dimensional Euclidean space, using the **Nelder-Mead method**, also known as /// **downhill simplex method**. The basic idea about the method can be obtained from /// <http://en.wikipedia.org/wiki/Nelder-Mead_method>. /// /// It should be noted, that this method, although deterministic, is rather a heuristic and therefore /// may converge to a local minima, not necessary a global one. It is iterative optimization technique, /// which at each step uses an information about the values of a function evaluated only at `n+1` /// points, arranged as a *simplex* in `n`-dimensional space (hence the second name of the method). At /// each step new point is chosen to evaluate function at, obtained value is compared with previous /// ones and based on this information simplex changes it's shape , slowly moving to the local minimum. /// Thus this method is using *only* function values to make decision, on contrary to, say, Nonlinear /// Conjugate Gradient method (which is also implemented in optim). /// /// Algorithm stops when the number of function evaluations done exceeds termcrit.maxCount, when the /// function values at the vertices of simplex are within termcrit.epsilon range or simplex becomes so /// small that it can enclosed in a box with termcrit.epsilon sides, whatever comes first, for some /// defined by user positive integer termcrit.maxCount and positive non-integer termcrit.epsilon. /// /// /// Note: DownhillSolver is a derivative of the abstract interface /// cv::MinProblemSolver, which in turn is derived from the Algorithm interface and is used to /// encapsulate the functionality, common to all non-linear optimization algorithms in the optim /// module. /// /// /// Note: term criteria should meet following condition: /// ```ignore /// termcrit.type == (TermCriteria::MAX_ITER + TermCriteria::EPS) && termcrit.epsilon > 0 && termcrit.maxCount > 0 /// ``` pub trait DownhillSolver: core::MinProblemSolver { #[inline(always)] fn as_raw_DownhillSolver(&self) -> *mut c_void; /// Returns the initial step that will be used in downhill simplex algorithm. /// /// ## Parameters /// * step: Initial step that will be used in algorithm. Note, that although corresponding setter /// accepts column-vectors as well as row-vectors, this method will return a row-vector. /// @see DownhillSolver::setInitStep fn get_init_step(&self, step: &mut dyn core::ToOutputArray) -> Result<()> { output_array_arg!(step); unsafe { sys::cv_DownhillSolver_getInitStep_const__OutputArray(self.as_raw_DownhillSolver(), step.as_raw__OutputArray()) }.into_result() } /// Sets the initial step that will be used in downhill simplex algorithm. /// /// Step, together with initial point (givin in DownhillSolver::minimize) are two `n`-dimensional /// vectors that are used to determine the shape of initial simplex. Roughly said, initial point /// determines the position of a simplex (it will become simplex's centroid), while step determines the /// spread (size in each dimension) of a simplex. To be more precise, if  are /// the initial step and initial point respectively, the vertices of a simplex will be: ///  and  for  where  denotes /// projections of the initial step of *n*-th coordinate (the result of projection is treated to be /// vector given by , where  form canonical basis) /// /// ## Parameters /// * step: Initial step that will be used in algorithm. Roughly said, it determines the spread /// (size in each dimension) of an initial simplex. fn set_init_step(&mut self, step: &dyn core::ToInputArray) -> Result<()> { input_array_arg!(step); unsafe { sys::cv_DownhillSolver_setInitStep__InputArray(self.as_raw_DownhillSolver(), step.as_raw__InputArray()) }.into_result() } } impl dyn DownhillSolver + '_ { /// This function returns the reference to the ready-to-use DownhillSolver object. /// /// All the parameters are optional, so this procedure can be called even without parameters at /// all. In this case, the default values will be used. As default value for terminal criteria are /// the only sensible ones, MinProblemSolver::setFunction() and DownhillSolver::setInitStep() /// should be called upon the obtained object, if the respective parameters were not given to /// create(). Otherwise, the two ways (give parameters to createDownhillSolver() or miss them out /// and call the MinProblemSolver::setFunction() and DownhillSolver::setInitStep()) are absolutely /// equivalent (and will drop the same errors in the same way, should invalid input be detected). /// ## Parameters /// * f: Pointer to the function that will be minimized, similarly to the one you submit via /// MinProblemSolver::setFunction. /// * initStep: Initial step, that will be used to construct the initial simplex, similarly to the one /// you submit via MinProblemSolver::setInitStep. /// * termcrit: Terminal criteria to the algorithm, similarly to the one you submit via /// MinProblemSolver::setTermCriteria. /// /// ## C++ default parameters /// * f: Ptr<MinProblemSolver::Function>() /// * init_step: Mat_<double>(1,1,0.0) /// * termcrit: TermCriteria(TermCriteria::MAX_ITER+TermCriteria::EPS,5000,0.000001) pub fn create(f: &types::PtrOfFunction, init_step: &dyn core::ToInputArray, termcrit: &core::TermCriteria) -> Result<types::PtrOfDownhillSolver> { input_array_arg!(init_step); unsafe { sys::cv_DownhillSolver_create_PtrOfFunction__InputArray_TermCriteria(f.as_raw_PtrOfFunction(), init_step.as_raw__InputArray(), termcrit.as_raw_TermCriteria()) }.into_result().map(|ptr| types::PtrOfDownhillSolver { ptr }) } } // boxed class cv::FileNode /// File Storage Node class. /// /// The node is used to store each and every element of the file storage opened for reading. When /// XML/YAML file is read, it is first parsed and stored in the memory as a hierarchical collection of /// nodes. Each node can be a "leaf" that is contain a single number or a string, or be a collection of /// other nodes. There can be named collections (mappings) where each element has a name and it is /// accessed by a name, and ordered collections (sequences) where elements do not have names but rather /// accessed by index. Type of the file node can be determined using FileNode::type method. /// /// Note that file nodes are only used for navigating file storages opened for reading. When a file /// storage is opened for writing, no data is stored in memory after it is written. pub struct FileNode { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for FileNode { fn drop(&mut self) { unsafe { sys::cv_FileNode_delete(self.ptr) }; } } impl FileNode { #[inline(always)] pub fn as_raw_FileNode(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for FileNode {} impl FileNode { /// The constructors. /// /// These constructors are used to create a default file node, construct it from obsolete structures or /// from the another file node. pub fn default() -> Result<core::FileNode> { unsafe { sys::cv_FileNode_FileNode() }.into_result().map(|ptr| core::FileNode { ptr }) } /// ## Parameters /// * node: File node to be used as initialization for the created file node. pub fn copy(node: &core::FileNode) -> Result<core::FileNode> { unsafe { sys::cv_FileNode_FileNode_FileNode(node.as_raw_FileNode()) }.into_result().map(|ptr| core::FileNode { ptr }) } /// Returns keys of a mapping node. /// ## Returns /// Keys of a mapping node. pub fn keys(&self) -> Result<types::VectorOfString> { unsafe { sys::cv_FileNode_keys_const(self.as_raw_FileNode()) }.into_result().map(|ptr| types::VectorOfString { ptr }) } /// Returns type of the node. /// ## Returns /// Type of the node. See FileNode::Type pub fn _type(&self) -> Result<i32> { unsafe { sys::cv_FileNode_type_const(self.as_raw_FileNode()) }.into_result() } /// returns true if the node is empty pub fn empty(&self) -> Result<bool> { unsafe { sys::cv_FileNode_empty_const(self.as_raw_FileNode()) }.into_result() } /// returns true if the node is a "none" object pub fn is_none(&self) -> Result<bool> { unsafe { sys::cv_FileNode_isNone_const(self.as_raw_FileNode()) }.into_result() } /// returns true if the node is a sequence pub fn is_seq(&self) -> Result<bool> { unsafe { sys::cv_FileNode_isSeq_const(self.as_raw_FileNode()) }.into_result() } /// returns true if the node is a mapping pub fn is_map(&self) -> Result<bool> { unsafe { sys::cv_FileNode_isMap_const(self.as_raw_FileNode()) }.into_result() } /// returns true if the node is an integer pub fn is_int(&self) -> Result<bool> { unsafe { sys::cv_FileNode_isInt_const(self.as_raw_FileNode()) }.into_result() } /// returns true if the node is a floating-point number pub fn is_real(&self) -> Result<bool> { unsafe { sys::cv_FileNode_isReal_const(self.as_raw_FileNode()) }.into_result() } /// returns true if the node is a text string pub fn is_string(&self) -> Result<bool> { unsafe { sys::cv_FileNode_isString_const(self.as_raw_FileNode()) }.into_result() } /// returns true if the node has a name pub fn is_named(&self) -> Result<bool> { unsafe { sys::cv_FileNode_isNamed_const(self.as_raw_FileNode()) }.into_result() } /// returns the node name or an empty string if the node is nameless pub fn name(&self) -> Result<String> { unsafe { sys::cv_FileNode_name_const(self.as_raw_FileNode()) }.into_result().map(crate::templ::receive_string_mut) } /// returns the number of elements in the node, if it is a sequence or mapping, or 1 otherwise. pub fn size(&self) -> Result<size_t> { unsafe { sys::cv_FileNode_size_const(self.as_raw_FileNode()) }.into_result() } /// returns the node content as an integer. If the node stores floating-point number, it is rounded. pub fn to_int(&self) -> Result<i32> { unsafe { sys::cv_FileNode_operator_int_const(self.as_raw_FileNode()) }.into_result() } /// returns the node content as float pub fn to_float(&self) -> Result<f32> { unsafe { sys::cv_FileNode_operator_float_const(self.as_raw_FileNode()) }.into_result() } /// returns the node content as double pub fn to_double(&self) -> Result<f64> { unsafe { sys::cv_FileNode_operator_double_const(self.as_raw_FileNode()) }.into_result() } /// returns the node content as text string pub fn to_string(&self) -> Result<String> { unsafe { sys::cv_FileNode_operator_String_const(self.as_raw_FileNode()) }.into_result().map(crate::templ::receive_string_mut) } /// Reads node elements to the buffer with the specified format. /// /// Usually it is more convenient to use operator `>>` instead of this method. /// ## Parameters /// * fmt: Specification of each array element. See @ref format_spec "format specification" /// * vec: Pointer to the destination array. /// * len: Number of bytes to read (buffer size limit). If it is greater than number of /// remaining elements then all of them will be read. pub fn read_raw(&self, fmt: &str, vec: &mut u8, len: size_t) -> Result<()> { string_arg!(fmt); unsafe { sys::cv_FileNode_readRaw_const_String_uchar_X_size_t(self.as_raw_FileNode(), fmt.as_ptr(), vec, len) }.into_result() } /// reads the registered object and returns pointer to it pub fn read_obj(&self) -> Result<&mut c_void> { unsafe { sys::cv_FileNode_readObj_const(self.as_raw_FileNode()) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } /// Simplified reading API to use with bindings. pub fn real(&self) -> Result<f64> { unsafe { sys::cv_FileNode_real_const(self.as_raw_FileNode()) }.into_result() } /// Simplified reading API to use with bindings. pub fn string(&self) -> Result<String> { unsafe { sys::cv_FileNode_string_const(self.as_raw_FileNode()) }.into_result().map(crate::templ::receive_string_mut) } /// Simplified reading API to use with bindings. pub fn mat(&self) -> Result<core::Mat> { unsafe { sys::cv_FileNode_mat_const(self.as_raw_FileNode()) }.into_result().map(|ptr| core::Mat { ptr }) } } // boxed class cv::FileNodeIterator /// used to iterate through sequences and mappings. /// /// A standard STL notation, with node.begin(), node.end() denoting the beginning and the end of a /// sequence, stored in node. See the data reading sample in the beginning of the section. pub struct FileNodeIterator { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for FileNodeIterator { fn drop(&mut self) { unsafe { sys::cv_FileNodeIterator_delete(self.ptr) }; } } impl FileNodeIterator { #[inline(always)] pub fn as_raw_FileNodeIterator(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for FileNodeIterator {} impl FileNodeIterator { /// Reads node elements to the buffer with the specified format. /// /// Usually it is more convenient to use operator `>>` instead of this method. /// ## Parameters /// * fmt: Specification of each array element. See @ref format_spec "format specification" /// * vec: Pointer to the destination array. /// * len: Number of bytes to read (buffer size limit). If it is greater than number of /// remaining elements then all of them will be read. /// /// ## C++ default parameters /// * len: (size_t)INT_MAX pub fn read_raw(&mut self, fmt: &str, vec: &mut u8, len: size_t) -> Result<core::FileNodeIterator> { string_arg!(fmt); unsafe { sys::cv_FileNodeIterator_readRaw_String_uchar_X_size_t(self.as_raw_FileNodeIterator(), fmt.as_ptr(), vec, len) }.into_result().map(|ptr| core::FileNodeIterator { ptr }) } } // boxed class cv::FileNodeIterator::SeqReader pub struct FileNodeIterator_SeqReader { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for FileNodeIterator_SeqReader { fn drop(&mut self) { unsafe { sys::cv_FileNodeIterator_SeqReader_delete(self.ptr) }; } } impl FileNodeIterator_SeqReader { #[inline(always)] pub fn as_raw_FileNodeIterator_SeqReader(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for FileNodeIterator_SeqReader {} // boxed class cv::FileStorage /// XML/YAML/JSON file storage class that encapsulates all the information necessary for writing or /// reading data to/from a file. pub struct FileStorage { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for FileStorage { fn drop(&mut self) { unsafe { sys::cv_FileStorage_delete(self.ptr) }; } } impl FileStorage { #[inline(always)] pub fn as_raw_FileStorage(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for FileStorage {} impl FileStorage { /// The constructors. /// /// The full constructor opens the file. Alternatively you can use the default constructor and then /// call FileStorage::open. pub fn default() -> Result<core::FileStorage> { unsafe { sys::cv_FileStorage_FileStorage() }.into_result().map(|ptr| core::FileStorage { ptr }) } /// @copydoc open() /// /// ## C++ default parameters /// * encoding: String() pub fn new(filename: &str, flags: i32, encoding: &str) -> Result<core::FileStorage> { string_arg!(filename); string_arg!(encoding); unsafe { sys::cv_FileStorage_FileStorage_String_int_String(filename.as_ptr(), flags, encoding.as_ptr()) }.into_result().map(|ptr| core::FileStorage { ptr }) } /// Opens a file. /// /// See description of parameters in FileStorage::FileStorage. The method calls FileStorage::release /// before opening the file. /// ## Parameters /// * filename: Name of the file to open or the text string to read the data from. /// Extension of the file (.xml, .yml/.yaml or .json) determines its format (XML, YAML or JSON /// respectively). Also you can append .gz to work with compressed files, for example myHugeMatrix.xml.gz. If both /// FileStorage::WRITE and FileStorage::MEMORY flags are specified, source is used just to specify /// the output file format (e.g. mydata.xml, .yml etc.). A file name can also contain parameters. /// You can use this format, "*?base64" (e.g. "file.json?base64" (case sensitive)), as an alternative to /// FileStorage::BASE64 flag. /// * flags: Mode of operation. One of FileStorage::Mode /// * encoding: Encoding of the file. Note that UTF-16 XML encoding is not supported currently and /// you should use 8-bit encoding instead of it. /// /// ## C++ default parameters /// * encoding: String() pub fn open(&mut self, filename: &str, flags: i32, encoding: &str) -> Result<bool> { string_arg!(filename); string_arg!(encoding); unsafe { sys::cv_FileStorage_open_String_int_String(self.as_raw_FileStorage(), filename.as_ptr(), flags, encoding.as_ptr()) }.into_result() } /// Checks whether the file is opened. /// /// ## Returns /// true if the object is associated with the current file and false otherwise. It is a /// good practice to call this method after you tried to open a file. pub fn is_opened(&self) -> Result<bool> { unsafe { sys::cv_FileStorage_isOpened_const(self.as_raw_FileStorage()) }.into_result() } /// Closes the file and releases all the memory buffers. /// /// Call this method after all I/O operations with the storage are finished. pub fn release(&mut self) -> Result<()> { unsafe { sys::cv_FileStorage_release(self.as_raw_FileStorage()) }.into_result() } /// Closes the file and releases all the memory buffers. /// /// Call this method after all I/O operations with the storage are finished. If the storage was /// opened for writing data and FileStorage::WRITE was specified pub fn release_and_get_string(&mut self) -> Result<String> { unsafe { sys::cv_FileStorage_releaseAndGetString(self.as_raw_FileStorage()) }.into_result().map(crate::templ::receive_string_mut) } /// Returns the first element of the top-level mapping. /// ## Returns /// The first element of the top-level mapping. pub fn get_first_top_level_node(&self) -> Result<core::FileNode> { unsafe { sys::cv_FileStorage_getFirstTopLevelNode_const(self.as_raw_FileStorage()) }.into_result().map(|ptr| core::FileNode { ptr }) } /// Returns the top-level mapping /// ## Parameters /// * streamidx: Zero-based index of the stream. In most cases there is only one stream in the file. /// However, YAML supports multiple streams and so there can be several. /// ## Returns /// The top-level mapping. /// /// ## C++ default parameters /// * streamidx: 0 pub fn root(&self, streamidx: i32) -> Result<core::FileNode> { unsafe { sys::cv_FileStorage_root_const_int(self.as_raw_FileStorage(), streamidx) }.into_result().map(|ptr| core::FileNode { ptr }) } /// Writes multiple numbers. /// /// Writes one or more numbers of the specified format to the currently written structure. Usually it is /// more convenient to use operator `<<` instead of this method. /// ## Parameters /// * fmt: Specification of each array element, see @ref format_spec "format specification" /// * vec: Pointer to the written array. /// * len: Number of the uchar elements to write. pub fn write_raw(&mut self, fmt: &str, vec: &u8, len: size_t) -> Result<()> { string_arg!(fmt); unsafe { sys::cv_FileStorage_writeRaw_String_const_uchar_X_size_t(self.as_raw_FileStorage(), fmt.as_ptr(), vec, len) }.into_result() } /// Writes the registered C structure (CvMat, CvMatND, CvSeq). /// ## Parameters /// * name: Name of the written object. /// * obj: Pointer to the object. /// @see ocvWrite for details. pub fn write_obj(&mut self, name: &str, obj: &c_void) -> Result<()> { string_arg!(name); unsafe { sys::cv_FileStorage_writeObj_String_const_void_X(self.as_raw_FileStorage(), name.as_ptr(), obj) }.into_result() } /// Simplified writing API to use with bindings. /// ## Parameters /// * name: Name of the written object /// * val: Value of the written object pub fn write_i32(&mut self, name: &str, val: i32) -> Result<()> { string_arg!(name); unsafe { sys::cv_FileStorage_write_String_int(self.as_raw_FileStorage(), name.as_ptr(), val) }.into_result() } pub fn write_f64(&mut self, name: &str, val: f64) -> Result<()> { string_arg!(name); unsafe { sys::cv_FileStorage_write_String_double(self.as_raw_FileStorage(), name.as_ptr(), val) }.into_result() } pub fn write_str(&mut self, name: &str, val: &str) -> Result<()> { string_arg!(name); string_arg!(val); unsafe { sys::cv_FileStorage_write_String_String(self.as_raw_FileStorage(), name.as_ptr(), val.as_ptr()) }.into_result() } pub fn write(&mut self, name: &str, val: &dyn core::ToInputArray) -> Result<()> { string_arg!(name); input_array_arg!(val); unsafe { sys::cv_FileStorage_write_String__InputArray(self.as_raw_FileStorage(), name.as_ptr(), val.as_raw__InputArray()) }.into_result() } /// Writes a comment. /// /// The function writes a comment into file storage. The comments are skipped when the storage is read. /// ## Parameters /// * comment: The written comment, single-line or multi-line /// * append: If true, the function tries to put the comment at the end of current line. /// Else if the comment is multi-line, or if it does not fit at the end of the current /// line, the comment starts a new line. /// /// ## C++ default parameters /// * append: false pub fn write_comment(&mut self, comment: &str, append: bool) -> Result<()> { string_arg!(comment); unsafe { sys::cv_FileStorage_writeComment_String_bool(self.as_raw_FileStorage(), comment.as_ptr(), append) }.into_result() } /// Returns the normalized object name for the specified name of a file. /// ## Parameters /// * filename: Name of a file /// ## Returns /// The normalized object name. pub fn get_default_object_name(filename: &str) -> Result<String> { string_arg!(filename); unsafe { sys::cv_FileStorage_getDefaultObjectName_String(filename.as_ptr()) }.into_result().map(crate::templ::receive_string_mut) } /// Returns the current format. /// ## Returns /// The current format, see FileStorage::Mode pub fn get_format(&self) -> Result<i32> { unsafe { sys::cv_FileStorage_getFormat_const(self.as_raw_FileStorage()) }.into_result() } } // Generating impl for trait core::Formatted /// @todo document pub trait Formatted { #[inline(always)] fn as_raw_Formatted(&self) -> *mut c_void; fn next(&mut self) -> Result<String> { unsafe { sys::cv_Formatted_next(self.as_raw_Formatted()) }.into_result().map(crate::templ::receive_string) } fn reset(&mut self) -> Result<()> { unsafe { sys::cv_Formatted_reset(self.as_raw_Formatted()) }.into_result() } } // Generating impl for trait core::Formatter /// @todo document pub trait Formatter { #[inline(always)] fn as_raw_Formatter(&self) -> *mut c_void; fn format(&self, mtx: &core::Mat) -> Result<types::PtrOfFormatted> { unsafe { sys::cv_Formatter_format_const_Mat(self.as_raw_Formatter(), mtx.as_raw_Mat()) }.into_result().map(|ptr| types::PtrOfFormatted { ptr }) } /// /// ## C++ default parameters /// * p: 8 fn set32f_precision(&mut self, p: i32) -> Result<()> { unsafe { sys::cv_Formatter_set32fPrecision_int(self.as_raw_Formatter(), p) }.into_result() } /// /// ## C++ default parameters /// * p: 16 fn set64f_precision(&mut self, p: i32) -> Result<()> { unsafe { sys::cv_Formatter_set64fPrecision_int(self.as_raw_Formatter(), p) }.into_result() } /// /// ## C++ default parameters /// * ml: true fn set_multiline(&mut self, ml: bool) -> Result<()> { unsafe { sys::cv_Formatter_setMultiline_bool(self.as_raw_Formatter(), ml) }.into_result() } } impl dyn Formatter + '_ { /// /// ## C++ default parameters /// * fmt: FMT_DEFAULT pub fn get(fmt: i32) -> Result<types::PtrOfFormatter> { unsafe { sys::cv_Formatter_get_int(fmt) }.into_result().map(|ptr| types::PtrOfFormatter { ptr }) } } // boxed class cv::Hamming /// replaced with CV_Assert(expr) in Debug configuration pub struct Hamming { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Hamming { fn drop(&mut self) { unsafe { sys::cv_Hamming_delete(self.ptr) }; } } impl Hamming { #[inline(always)] pub fn as_raw_Hamming(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Hamming {} impl KeyPoint { /// the default constructor pub fn default() -> Result<core::KeyPoint> { unsafe { sys::cv_KeyPoint_KeyPoint() }.into_result() } /// ## Parameters /// * _pt: x & y coordinates of the keypoint /// * _size: keypoint diameter /// * _angle: keypoint orientation /// * _response: keypoint detector response on the keypoint (that is, strength of the keypoint) /// * _octave: pyramid octave in which the keypoint has been detected /// * _class_id: object id /// /// ## C++ default parameters /// * _angle: -1 /// * _response: 0 /// * _octave: 0 /// * _class_id: -1 pub fn new_point(_pt: core::Point2f, _size: f32, _angle: f32, _response: f32, _octave: i32, _class_id: i32) -> Result<core::KeyPoint> { unsafe { sys::cv_KeyPoint_KeyPoint_Point2f_float_float_float_int_int(_pt, _size, _angle, _response, _octave, _class_id) }.into_result() } /// ## Parameters /// * x: x-coordinate of the keypoint /// * y: y-coordinate of the keypoint /// * _size: keypoint diameter /// * _angle: keypoint orientation /// * _response: keypoint detector response on the keypoint (that is, strength of the keypoint) /// * _octave: pyramid octave in which the keypoint has been detected /// * _class_id: object id /// /// ## C++ default parameters /// * _angle: -1 /// * _response: 0 /// * _octave: 0 /// * _class_id: -1 pub fn new_coords(x: f32, y: f32, _size: f32, _angle: f32, _response: f32, _octave: i32, _class_id: i32) -> Result<core::KeyPoint> { unsafe { sys::cv_KeyPoint_KeyPoint_float_float_float_float_float_int_int(x, y, _size, _angle, _response, _octave, _class_id) }.into_result() } pub fn hash(self) -> Result<size_t> { unsafe { sys::cv_KeyPoint_hash_const(self) }.into_result() } /// This method converts vector of keypoints to vector of points or the reverse, where each keypoint is /// assigned the same size and the same orientation. /// /// ## Parameters /// * keypoints: Keypoints obtained from any feature detection algorithm like SIFT/SURF/ORB /// * points2f: Array of (x,y) coordinates of each keypoint /// * keypointIndexes: Array of indexes of keypoints to be converted to points. (Acts like a mask to /// convert only specified keypoints) /// /// ## C++ default parameters /// * keypoint_indexes: std::vector<int>() pub fn convert_from(keypoints: &types::VectorOfKeyPoint, points2f: &mut types::VectorOfPoint2f, keypoint_indexes: &types::VectorOfint) -> Result<()> { unsafe { sys::cv_KeyPoint_convert_VectorOfKeyPoint_VectorOfPoint2f_VectorOfint(keypoints.as_raw_VectorOfKeyPoint(), points2f.as_raw_VectorOfPoint2f(), keypoint_indexes.as_raw_VectorOfint()) }.into_result() } /// ## Parameters /// * points2f: Array of (x,y) coordinates of each keypoint /// * keypoints: Keypoints obtained from any feature detection algorithm like SIFT/SURF/ORB /// * size: keypoint diameter /// * response: keypoint detector response on the keypoint (that is, strength of the keypoint) /// * octave: pyramid octave in which the keypoint has been detected /// * class_id: object id /// /// ## C++ default parameters /// * size: 1 /// * response: 1 /// * octave: 0 /// * class_id: -1 pub fn convert_to(points2f: &types::VectorOfPoint2f, keypoints: &mut types::VectorOfKeyPoint, size: f32, response: f32, octave: i32, class_id: i32) -> Result<()> { unsafe { sys::cv_KeyPoint_convert_VectorOfPoint2f_VectorOfKeyPoint_float_float_int_int(points2f.as_raw_VectorOfPoint2f(), keypoints.as_raw_VectorOfKeyPoint(), size, response, octave, class_id) }.into_result() } /// This method computes overlap for pair of keypoints. Overlap is the ratio between area of keypoint /// regions' intersection and area of keypoint regions' union (considering keypoint region as circle). /// If they don't overlap, we get zero. If they coincide at same location with same size, we get 1. /// ## Parameters /// * kp1: First keypoint /// * kp2: Second keypoint pub fn overlap(kp1: core::KeyPoint, kp2: core::KeyPoint) -> Result<f32> { unsafe { sys::cv_KeyPoint_overlap_KeyPoint_KeyPoint(kp1, kp2) }.into_result() } } // boxed class cv::LDA /// Linear Discriminant Analysis /// @todo document this class pub struct LDA { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for LDA { fn drop(&mut self) { unsafe { sys::cv_LDA_delete(self.ptr) }; } } impl LDA { #[inline(always)] pub fn as_raw_LDA(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for LDA {} impl LDA { /// constructor /// Initializes a LDA with num_components (default 0). /// /// ## C++ default parameters /// * num_components: 0 pub fn new(num_components: i32) -> Result<core::LDA> { unsafe { sys::cv_LDA_LDA_int(num_components) }.into_result().map(|ptr| core::LDA { ptr }) } /// Initializes and performs a Discriminant Analysis with Fisher's /// Optimization Criterion on given data in src and corresponding labels /// in labels. If 0 (or less) number of components are given, they are /// automatically determined for given data in computation. /// /// ## C++ default parameters /// * num_components: 0 pub fn new_with_data(src: &dyn core::ToInputArray, labels: &dyn core::ToInputArray, num_components: i32) -> Result<core::LDA> { input_array_arg!(src); input_array_arg!(labels); unsafe { sys::cv_LDA_LDA__InputArray__InputArray_int(src.as_raw__InputArray(), labels.as_raw__InputArray(), num_components) }.into_result().map(|ptr| core::LDA { ptr }) } /// Serializes this object to a given filename. pub fn save(&self, filename: &str) -> Result<()> { string_arg!(filename); unsafe { sys::cv_LDA_save_const_String(self.as_raw_LDA(), filename.as_ptr()) }.into_result() } /// Deserializes this object from a given filename. pub fn load(&mut self, filename: &str) -> Result<()> { string_arg!(filename); unsafe { sys::cv_LDA_load_String(self.as_raw_LDA(), filename.as_ptr()) }.into_result() } /// Serializes this object to a given cv::FileStorage. pub fn save_1(&self, fs: &mut core::FileStorage) -> Result<()> { unsafe { sys::cv_LDA_save_const_FileStorage(self.as_raw_LDA(), fs.as_raw_FileStorage()) }.into_result() } /// Deserializes this object from a given cv::FileStorage. pub fn load_1(&mut self, node: &core::FileStorage) -> Result<()> { unsafe { sys::cv_LDA_load_FileStorage(self.as_raw_LDA(), node.as_raw_FileStorage()) }.into_result() } /// Compute the discriminants for data in src (row aligned) and labels. pub fn compute(&mut self, src: &dyn core::ToInputArray, labels: &dyn core::ToInputArray) -> Result<()> { input_array_arg!(src); input_array_arg!(labels); unsafe { sys::cv_LDA_compute__InputArray__InputArray(self.as_raw_LDA(), src.as_raw__InputArray(), labels.as_raw__InputArray()) }.into_result() } /// Projects samples into the LDA subspace. /// src may be one or more row aligned samples. pub fn project(&mut self, src: &dyn core::ToInputArray) -> Result<core::Mat> { input_array_arg!(src); unsafe { sys::cv_LDA_project__InputArray(self.as_raw_LDA(), src.as_raw__InputArray()) }.into_result().map(|ptr| core::Mat { ptr }) } /// Reconstructs projections from the LDA subspace. /// src may be one or more row aligned projections. pub fn reconstruct(&mut self, src: &dyn core::ToInputArray) -> Result<core::Mat> { input_array_arg!(src); unsafe { sys::cv_LDA_reconstruct__InputArray(self.as_raw_LDA(), src.as_raw__InputArray()) }.into_result().map(|ptr| core::Mat { ptr }) } /// Returns the eigenvectors of this LDA. pub fn eigenvectors(&self) -> Result<core::Mat> { unsafe { sys::cv_LDA_eigenvectors_const(self.as_raw_LDA()) }.into_result().map(|ptr| core::Mat { ptr }) } /// Returns the eigenvalues of this LDA. pub fn eigenvalues(&self) -> Result<core::Mat> { unsafe { sys::cv_LDA_eigenvalues_const(self.as_raw_LDA()) }.into_result().map(|ptr| core::Mat { ptr }) } pub fn subspace_project(w: &dyn core::ToInputArray, mean: &dyn core::ToInputArray, src: &dyn core::ToInputArray) -> Result<core::Mat> { input_array_arg!(w); input_array_arg!(mean); input_array_arg!(src); unsafe { sys::cv_LDA_subspaceProject__InputArray__InputArray__InputArray(w.as_raw__InputArray(), mean.as_raw__InputArray(), src.as_raw__InputArray()) }.into_result().map(|ptr| core::Mat { ptr }) } pub fn subspace_reconstruct(w: &dyn core::ToInputArray, mean: &dyn core::ToInputArray, src: &dyn core::ToInputArray) -> Result<core::Mat> { input_array_arg!(w); input_array_arg!(mean); input_array_arg!(src); unsafe { sys::cv_LDA_subspaceReconstruct__InputArray__InputArray__InputArray(w.as_raw__InputArray(), mean.as_raw__InputArray(), src.as_raw__InputArray()) }.into_result().map(|ptr| core::Mat { ptr }) } } // boxed class cv::Mat /// n-dimensional dense array class \anchor CVMat_Details /// /// The class Mat represents an n-dimensional dense numerical single-channel or multi-channel array. It /// can be used to store real or complex-valued vectors and matrices, grayscale or color images, voxel /// volumes, vector fields, point clouds, tensors, histograms (though, very high-dimensional histograms /// may be better stored in a SparseMat ). The data layout of the array `M` is defined by the array /// `M.step[]`, so that the address of element , where , is /// computed as: ///  /// In case of a 2-dimensional array, the above formula is reduced to: ///  /// Note that `M.step[i] >= M.step[i+1]` (in fact, `M.step[i] >= M.step[i+1]*M.size[i+1]` ). This means /// that 2-dimensional matrices are stored row-by-row, 3-dimensional matrices are stored plane-by-plane, /// and so on. M.step[M.dims-1] is minimal and always equal to the element size M.elemSize() . /// /// So, the data layout in Mat is fully compatible with CvMat, IplImage, and CvMatND types from OpenCV /// 1.x. It is also compatible with the majority of dense array types from the standard toolkits and /// SDKs, such as Numpy (ndarray), Win32 (independent device bitmaps), and others, that is, with any /// array that uses *steps* (or *strides*) to compute the position of a pixel. Due to this /// compatibility, it is possible to make a Mat header for user-allocated data and process it in-place /// using OpenCV functions. /// /// There are many different ways to create a Mat object. The most popular options are listed below: /// /// - Use the create(nrows, ncols, type) method or the similar Mat(nrows, ncols, type[, fillValue]) /// constructor. A new array of the specified size and type is allocated. type has the same meaning as /// in the cvCreateMat method. For example, CV_8UC1 means a 8-bit single-channel array, CV_32FC2 /// means a 2-channel (complex) floating-point array, and so on. /// ```ignore /// // make a 7x7 complex matrix filled with 1+3j. /// Mat M(7,7,CV_32FC2,Scalar(1,3)); /// // and now turn M to a 100x60 15-channel 8-bit matrix. /// // The old content will be deallocated /// M.create(100,60,CV_8UC(15)); /// ``` /// /// As noted in the introduction to this chapter, create() allocates only a new array when the shape /// or type of the current array are different from the specified ones. /// /// - Create a multi-dimensional array: /// ```ignore /// // create a 100x100x100 8-bit array /// int sz[] = {100, 100, 100}; /// Mat bigCube(3, sz, CV_8U, Scalar::all(0)); /// ``` /// /// It passes the number of dimensions =1 to the Mat constructor but the created array will be /// 2-dimensional with the number of columns set to 1. So, Mat::dims is always \>= 2 (can also be 0 /// when the array is empty). /// /// - Use a copy constructor or assignment operator where there can be an array or expression on the /// right side (see below). As noted in the introduction, the array assignment is an O(1) operation /// because it only copies the header and increases the reference counter. The Mat::clone() method can /// be used to get a full (deep) copy of the array when you need it. /// /// - Construct a header for a part of another array. It can be a single row, single column, several /// rows, several columns, rectangular region in the array (called a *minor* in algebra) or a /// diagonal. Such operations are also O(1) because the new header references the same data. You can /// actually modify a part of the array using this feature, for example: /// ```ignore /// // add the 5-th row, multiplied by 3 to the 3rd row /// M.row(3) = M.row(3) + M.row(5)*3; /// // now copy the 7-th column to the 1-st column /// // M.col(1) = M.col(7); // this will not work /// Mat M1 = M.col(1); /// M.col(7).copyTo(M1); /// // create a new 320x240 image /// Mat img(Size(320,240),CV_8UC3); /// // select a ROI /// Mat roi(img, Rect(10,10,100,100)); /// // fill the ROI with (0,255,0) (which is green in RGB space); /// // the original 320x240 image will be modified /// roi = Scalar(0,255,0); /// ``` /// /// Due to the additional datastart and dataend members, it is possible to compute a relative /// sub-array position in the main *container* array using locateROI(): /// ```ignore /// Mat A = Mat::eye(10, 10, CV_32S); /// // extracts A columns, 1 (inclusive) to 3 (exclusive). /// Mat B = A(Range::all(), Range(1, 3)); /// // extracts B rows, 5 (inclusive) to 9 (exclusive). /// // that is, C \~ A(Range(5, 9), Range(1, 3)) /// Mat C = B(Range(5, 9), Range::all()); /// Size size; Point ofs; /// C.locateROI(size, ofs); /// // size will be (width=10,height=10) and the ofs will be (x=1, y=5) /// ``` /// /// As in case of whole matrices, if you need a deep copy, use the `clone()` method of the extracted /// sub-matrices. /// /// - Make a header for user-allocated data. It can be useful to do the following: /// -# Process "foreign" data using OpenCV (for example, when you implement a DirectShow\* filter or /// a processing module for gstreamer, and so on). For example: /// ```ignore /// void process_video_frame(const unsigned char* pixels, /// int width, int height, int step) /// { /// Mat img(height, width, CV_8UC3, pixels, step); /// GaussianBlur(img, img, Size(7,7), 1.5, 1.5); /// } /// ``` /// /// -# Quickly initialize small matrices and/or get a super-fast element access. /// ```ignore /// double m[3][3] = {{a, b, c}, {d, e, f}, {g, h, i}}; /// Mat M = Mat(3, 3, CV_64F, m).inv(); /// ``` /// /// . /// Partial yet very common cases of this *user-allocated data* case are conversions from CvMat and /// IplImage to Mat. For this purpose, there is function cv::cvarrToMat taking pointers to CvMat or /// IplImage and the optional flag indicating whether to copy the data or not. /// @snippet samples/cpp/image.cpp iplimage /// /// - Use MATLAB-style array initializers, zeros(), ones(), eye(), for example: /// ```ignore /// // create a double-precision identity matrix and add it to M. /// M += Mat::eye(M.rows, M.cols, CV_64F); /// ``` /// /// /// - Use a comma-separated initializer: /// ```ignore /// // create a 3x3 double-precision identity matrix /// Mat M = (Mat_<double>(3,3) << 1, 0, 0, 0, 1, 0, 0, 0, 1); /// ``` /// /// With this approach, you first call a constructor of the Mat class with the proper parameters, and /// then you just put `<< operator` followed by comma-separated values that can be constants, /// variables, expressions, and so on. Also, note the extra parentheses required to avoid compilation /// errors. /// /// Once the array is created, it is automatically managed via a reference-counting mechanism. If the /// array header is built on top of user-allocated data, you should handle the data by yourself. The /// array data is deallocated when no one points to it. If you want to release the data pointed by a /// array header before the array destructor is called, use Mat::release(). /// /// The next important thing to learn about the array class is element access. This manual already /// described how to compute an address of each array element. Normally, you are not required to use the /// formula directly in the code. If you know the array element type (which can be retrieved using the /// method Mat::type() ), you can access the element  of a 2-dimensional array as: /// ```ignore /// M.at<double>(i,j) += 1.f; /// ``` /// /// assuming that `M` is a double-precision floating-point array. There are several variants of the method /// at for a different number of dimensions. /// /// If you need to process a whole row of a 2D array, the most efficient way is to get the pointer to /// the row first, and then just use the plain C operator [] : /// ```ignore /// // compute sum of positive matrix elements /// // (assuming that M is a double-precision matrix) /// double sum=0; /// for(int i = 0; i < M.rows; i++) /// { /// const double* Mi = M.ptr<double>(i); /// for(int j = 0; j < M.cols; j++) /// sum += std::max(Mi[j], 0.); /// } /// ``` /// /// Some operations, like the one above, do not actually depend on the array shape. They just process /// elements of an array one by one (or elements from multiple arrays that have the same coordinates, /// for example, array addition). Such operations are called *element-wise*. It makes sense to check /// whether all the input/output arrays are continuous, namely, have no gaps at the end of each row. If /// yes, process them as a long single row: /// ```ignore /// // compute the sum of positive matrix elements, optimized variant /// double sum=0; /// int cols = M.cols, rows = M.rows; /// if(M.isContinuous()) /// { /// cols *= rows; /// rows = 1; /// } /// for(int i = 0; i < rows; i++) /// { /// const double* Mi = M.ptr<double>(i); /// for(int j = 0; j < cols; j++) /// sum += std::max(Mi[j], 0.); /// } /// ``` /// /// In case of the continuous matrix, the outer loop body is executed just once. So, the overhead is /// smaller, which is especially noticeable in case of small matrices. /// /// Finally, there are STL-style iterators that are smart enough to skip gaps between successive rows: /// ```ignore /// // compute sum of positive matrix elements, iterator-based variant /// double sum=0; /// MatConstIterator_<double> it = M.begin<double>(), it_end = M.end<double>(); /// for(; it != it_end; ++it) /// sum += std::max(*it, 0.); /// ``` /// /// The matrix iterators are random-access iterators, so they can be passed to any STL algorithm, /// including std::sort(). /// /// /// Note: Matrix Expressions and arithmetic see MatExpr pub struct Mat { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Mat { fn drop(&mut self) { unsafe { sys::cv_Mat_delete(self.ptr) }; } } impl Mat { #[inline(always)] pub fn as_raw_Mat(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Mat {} impl Mat { pub fn flags(&self) -> Result<i32> { unsafe { sys::cv_Mat_flags_const(self.as_raw_Mat()) }.into_result() } /// the matrix dimensionality, >= 2 pub fn dims(&self) -> Result<i32> { unsafe { sys::cv_Mat_dims_const(self.as_raw_Mat()) }.into_result() } /// the number of rows and columns or (-1, -1) when the matrix has more than 2 dimensions pub fn rows(&self) -> Result<i32> { unsafe { sys::cv_Mat_rows_const(self.as_raw_Mat()) }.into_result() } /// the number of rows and columns or (-1, -1) when the matrix has more than 2 dimensions pub fn cols(&self) -> Result<i32> { unsafe { sys::cv_Mat_cols_const(self.as_raw_Mat()) }.into_result() } /// pointer to the data pub fn data_mut(&mut self) -> Result<&mut u8> { unsafe { sys::cv_Mat_data(self.as_raw_Mat()) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } /// pointer to the data pub unsafe fn set_data(&mut self, val: &mut u8) -> Result<()> { { sys::cv_Mat_set_data_uchar_X(self.as_raw_Mat(), val) }.into_result() } /// helper fields used in locateROI and adjustROI pub fn datastart(&self) -> Result<&u8> { unsafe { sys::cv_Mat_datastart_const(self.as_raw_Mat()) }.into_result().and_then(|x| unsafe { x.as_ref() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } pub fn dataend(&self) -> Result<&u8> { unsafe { sys::cv_Mat_dataend_const(self.as_raw_Mat()) }.into_result().and_then(|x| unsafe { x.as_ref() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } pub fn datalimit(&self) -> Result<&u8> { unsafe { sys::cv_Mat_datalimit_const(self.as_raw_Mat()) }.into_result().and_then(|x| unsafe { x.as_ref() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } pub fn mat_size(&self) -> Result<core::MatSize> { unsafe { sys::cv_Mat_size_const(self.as_raw_Mat()) }.into_result().map(|ptr| core::MatSize { ptr }) } pub fn mat_step(&self) -> Result<core::MatStep> { unsafe { sys::cv_Mat_step_const(self.as_raw_Mat()) }.into_result().map(|ptr| core::MatStep { ptr }) } /// These are various constructors that form a matrix. As noted in the AutomaticAllocation, often /// the default constructor is enough, and the proper matrix will be allocated by an OpenCV function. /// The constructed matrix can further be assigned to another matrix or matrix expression or can be /// allocated with Mat::create . In the former case, the old content is de-referenced. pub fn default() -> Result<core::Mat> { unsafe { sys::cv_Mat_Mat() }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * rows: Number of rows in a 2D array. /// * cols: Number of columns in a 2D array. /// * type: Array type. Use CV_8UC1, ..., CV_64FC4 to create 1-4 channel matrices, or /// CV_8UC(n), ..., CV_64FC(n) to create multi-channel (up to CV_CN_MAX channels) matrices. pub unsafe fn new_rows_cols(rows: i32, cols: i32, _type: i32) -> Result<core::Mat> { { sys::cv_Mat_Mat_int_int_int(rows, cols, _type) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * size: 2D array size: Size(cols, rows) . In the Size() constructor, the number of rows and the /// number of columns go in the reverse order. /// * type: Array type. Use CV_8UC1, ..., CV_64FC4 to create 1-4 channel matrices, or /// CV_8UC(n), ..., CV_64FC(n) to create multi-channel (up to CV_CN_MAX channels) matrices. pub unsafe fn new_size(size: core::Size, _type: i32) -> Result<core::Mat> { { sys::cv_Mat_Mat_Size_int(size, _type) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * rows: Number of rows in a 2D array. /// * cols: Number of columns in a 2D array. /// * type: Array type. Use CV_8UC1, ..., CV_64FC4 to create 1-4 channel matrices, or /// CV_8UC(n), ..., CV_64FC(n) to create multi-channel (up to CV_CN_MAX channels) matrices. /// * s: An optional value to initialize each matrix element with. To set all the matrix elements to /// the particular value after the construction, use the assignment operator /// Mat::operator=(const Scalar& value) . pub fn new_rows_cols_with_default(rows: i32, cols: i32, _type: i32, s: core::Scalar) -> Result<core::Mat> { unsafe { sys::cv_Mat_Mat_int_int_int_Scalar(rows, cols, _type, s) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * size: 2D array size: Size(cols, rows) . In the Size() constructor, the number of rows and the /// number of columns go in the reverse order. /// * type: Array type. Use CV_8UC1, ..., CV_64FC4 to create 1-4 channel matrices, or /// CV_8UC(n), ..., CV_64FC(n) to create multi-channel (up to CV_CN_MAX channels) matrices. /// * s: An optional value to initialize each matrix element with. To set all the matrix elements to /// the particular value after the construction, use the assignment operator /// Mat::operator=(const Scalar& value) . pub fn new_size_with_default(size: core::Size, _type: i32, s: core::Scalar) -> Result<core::Mat> { unsafe { sys::cv_Mat_Mat_Size_int_Scalar(size, _type, s) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * sizes: Array of integers specifying an n-dimensional array shape. /// * type: Array type. Use CV_8UC1, ..., CV_64FC4 to create 1-4 channel matrices, or /// CV_8UC(n), ..., CV_64FC(n) to create multi-channel (up to CV_CN_MAX channels) matrices. pub unsafe fn new_nd(sizes: &types::VectorOfint, _type: i32) -> Result<core::Mat> { { sys::cv_Mat_Mat_VectorOfint_int(sizes.as_raw_VectorOfint(), _type) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * sizes: Array of integers specifying an n-dimensional array shape. /// * type: Array type. Use CV_8UC1, ..., CV_64FC4 to create 1-4 channel matrices, or /// CV_8UC(n), ..., CV_64FC(n) to create multi-channel (up to CV_CN_MAX channels) matrices. /// * s: An optional value to initialize each matrix element with. To set all the matrix elements to /// the particular value after the construction, use the assignment operator /// Mat::operator=(const Scalar& value) . pub fn new_nd_with_default(sizes: &types::VectorOfint, _type: i32, s: core::Scalar) -> Result<core::Mat> { unsafe { sys::cv_Mat_Mat_VectorOfint_int_Scalar(sizes.as_raw_VectorOfint(), _type, s) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * m: Array that (as a whole or partly) is assigned to the constructed matrix. No data is copied /// by these constructors. Instead, the header pointing to m data or its sub-array is constructed and /// associated with it. The reference counter, if any, is incremented. So, when you modify the matrix /// formed using such a constructor, you also modify the corresponding elements of m . If you want to /// have an independent copy of the sub-array, use Mat::clone() . pub fn copy(m: &core::Mat) -> Result<core::Mat> { unsafe { sys::cv_Mat_Mat_Mat(m.as_raw_Mat()) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * rows: Number of rows in a 2D array. /// * cols: Number of columns in a 2D array. /// * type: Array type. Use CV_8UC1, ..., CV_64FC4 to create 1-4 channel matrices, or /// CV_8UC(n), ..., CV_64FC(n) to create multi-channel (up to CV_CN_MAX channels) matrices. /// * data: Pointer to the user data. Matrix constructors that take data and step parameters do not /// allocate matrix data. Instead, they just initialize the matrix header that points to the specified /// data, which means that no data is copied. This operation is very efficient and can be used to /// process external data using OpenCV functions. The external data is not automatically deallocated, so /// you should take care of it. /// * step: Number of bytes each matrix row occupies. The value should include the padding bytes at /// the end of each row, if any. If the parameter is missing (set to AUTO_STEP ), no padding is assumed /// and the actual step is calculated as cols*elemSize(). See Mat::elemSize. /// /// ## C++ default parameters /// * step: AUTO_STEP pub fn new_rows_cols_with_data(rows: i32, cols: i32, _type: i32, data: &mut c_void, step: size_t) -> Result<core::Mat> { unsafe { sys::cv_Mat_Mat_int_int_int_void_X_size_t(rows, cols, _type, data, step) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * size: 2D array size: Size(cols, rows) . In the Size() constructor, the number of rows and the /// number of columns go in the reverse order. /// * type: Array type. Use CV_8UC1, ..., CV_64FC4 to create 1-4 channel matrices, or /// CV_8UC(n), ..., CV_64FC(n) to create multi-channel (up to CV_CN_MAX channels) matrices. /// * data: Pointer to the user data. Matrix constructors that take data and step parameters do not /// allocate matrix data. Instead, they just initialize the matrix header that points to the specified /// data, which means that no data is copied. This operation is very efficient and can be used to /// process external data using OpenCV functions. The external data is not automatically deallocated, so /// you should take care of it. /// * step: Number of bytes each matrix row occupies. The value should include the padding bytes at /// the end of each row, if any. If the parameter is missing (set to AUTO_STEP ), no padding is assumed /// and the actual step is calculated as cols*elemSize(). See Mat::elemSize. /// /// ## C++ default parameters /// * step: AUTO_STEP pub fn new_size_with_data(size: core::Size, _type: i32, data: &mut c_void, step: size_t) -> Result<core::Mat> { unsafe { sys::cv_Mat_Mat_Size_int_void_X_size_t(size, _type, data, step) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * sizes: Array of integers specifying an n-dimensional array shape. /// * type: Array type. Use CV_8UC1, ..., CV_64FC4 to create 1-4 channel matrices, or /// CV_8UC(n), ..., CV_64FC(n) to create multi-channel (up to CV_CN_MAX channels) matrices. /// * data: Pointer to the user data. Matrix constructors that take data and step parameters do not /// allocate matrix data. Instead, they just initialize the matrix header that points to the specified /// data, which means that no data is copied. This operation is very efficient and can be used to /// process external data using OpenCV functions. The external data is not automatically deallocated, so /// you should take care of it. /// * steps: Array of ndims-1 steps in case of a multi-dimensional array (the last step is always /// set to the element size). If not specified, the matrix is assumed to be continuous. /// /// ## C++ default parameters /// * steps: 0 pub fn new_nd_with_data(sizes: &types::VectorOfint, _type: i32, data: &mut c_void, steps: &[size_t]) -> Result<core::Mat> { unsafe { sys::cv_Mat_Mat_VectorOfint_int_void_X_const_size_t_X(sizes.as_raw_VectorOfint(), _type, data, steps.as_ptr()) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * m: Array that (as a whole or partly) is assigned to the constructed matrix. No data is copied /// by these constructors. Instead, the header pointing to m data or its sub-array is constructed and /// associated with it. The reference counter, if any, is incremented. So, when you modify the matrix /// formed using such a constructor, you also modify the corresponding elements of m . If you want to /// have an independent copy of the sub-array, use Mat::clone() . /// * rowRange: Range of the m rows to take. As usual, the range start is inclusive and the range /// end is exclusive. Use Range::all() to take all the rows. /// * colRange: Range of the m columns to take. Use Range::all() to take all the columns. /// /// ## C++ default parameters /// * col_range: Range::all() pub fn rowscols(m: &core::Mat, row_range: &core::Range, col_range: &core::Range) -> Result<core::Mat> { unsafe { sys::cv_Mat_Mat_Mat_Range_Range(m.as_raw_Mat(), row_range.as_raw_Range(), col_range.as_raw_Range()) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * m: Array that (as a whole or partly) is assigned to the constructed matrix. No data is copied /// by these constructors. Instead, the header pointing to m data or its sub-array is constructed and /// associated with it. The reference counter, if any, is incremented. So, when you modify the matrix /// formed using such a constructor, you also modify the corresponding elements of m . If you want to /// have an independent copy of the sub-array, use Mat::clone() . /// * roi: Region of interest. pub fn roi(m: &core::Mat, roi: core::Rect) -> Result<core::Mat> { unsafe { sys::cv_Mat_Mat_Mat_Rect(m.as_raw_Mat(), roi) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * m: Array that (as a whole or partly) is assigned to the constructed matrix. No data is copied /// by these constructors. Instead, the header pointing to m data or its sub-array is constructed and /// associated with it. The reference counter, if any, is incremented. So, when you modify the matrix /// formed using such a constructor, you also modify the corresponding elements of m . If you want to /// have an independent copy of the sub-array, use Mat::clone() . /// * ranges: Array of selected ranges of m along each dimensionality. pub fn ranges(m: &core::Mat, ranges: &types::VectorOfRange) -> Result<core::Mat> { unsafe { sys::cv_Mat_Mat_Mat_VectorOfRange(m.as_raw_Mat(), ranges.as_raw_VectorOfRange()) }.into_result().map(|ptr| core::Mat { ptr }) } /// retrieve UMat from Mat /// /// ## C++ default parameters /// * usage_flags: USAGE_DEFAULT pub fn get_umat(&self, access_flags: i32, usage_flags: core::UMatUsageFlags) -> Result<core::UMat> { unsafe { sys::cv_Mat_getUMat_const_int_UMatUsageFlags(self.as_raw_Mat(), access_flags, usage_flags) }.into_result().map(|ptr| core::UMat { ptr }) } /// Creates a matrix header for the specified matrix row. /// /// The method makes a new header for the specified matrix row and returns it. This is an O(1) /// operation, regardless of the matrix size. The underlying data of the new matrix is shared with the /// original matrix. Here is the example of one of the classical basic matrix processing operations, /// axpy, used by LU and many other algorithms: /// ```ignore /// inline void matrix_axpy(Mat& A, int i, int j, double alpha) /// { /// A.row(i) += A.row(j)*alpha; /// } /// ``` /// /// /// Note: In the current implementation, the following code does not work as expected: /// ```ignore /// Mat A; /// ... /// A.row(i) = A.row(j); // will not work /// ``` /// /// This happens because A.row(i) forms a temporary header that is further assigned to another header. /// Remember that each of these operations is O(1), that is, no data is copied. Thus, the above /// assignment is not true if you may have expected the j-th row to be copied to the i-th row. To /// achieve that, you should either turn this simple assignment into an expression or use the /// Mat::copyTo method: /// ```ignore /// Mat A; /// ... /// // works, but looks a bit obscure. /// A.row(i) = A.row(j) + 0; /// // this is a bit longer, but the recommended method. /// A.row(j).copyTo(A.row(i)); /// ``` /// /// ## Parameters /// * y: A 0-based row index. pub fn row(&self, y: i32) -> Result<core::Mat> { unsafe { sys::cv_Mat_row_const_int(self.as_raw_Mat(), y) }.into_result().map(|ptr| core::Mat { ptr }) } /// Creates a matrix header for the specified matrix column. /// /// The method makes a new header for the specified matrix column and returns it. This is an O(1) /// operation, regardless of the matrix size. The underlying data of the new matrix is shared with the /// original matrix. See also the Mat::row description. /// ## Parameters /// * x: A 0-based column index. pub fn col(&self, x: i32) -> Result<core::Mat> { unsafe { sys::cv_Mat_col_const_int(self.as_raw_Mat(), x) }.into_result().map(|ptr| core::Mat { ptr }) } /// Creates a matrix header for the specified row span. /// /// The method makes a new header for the specified row span of the matrix. Similarly to Mat::row and /// Mat::col , this is an O(1) operation. /// ## Parameters /// * startrow: An inclusive 0-based start index of the row span. /// * endrow: An exclusive 0-based ending index of the row span. pub fn row_bounds(&self, startrow: i32, endrow: i32) -> Result<core::Mat> { unsafe { sys::cv_Mat_rowRange_const_int_int(self.as_raw_Mat(), startrow, endrow) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * r: Range structure containing both the start and the end indices. pub fn row_range(&self, r: &core::Range) -> Result<core::Mat> { unsafe { sys::cv_Mat_rowRange_const_Range(self.as_raw_Mat(), r.as_raw_Range()) }.into_result().map(|ptr| core::Mat { ptr }) } /// Creates a matrix header for the specified column span. /// /// The method makes a new header for the specified column span of the matrix. Similarly to Mat::row and /// Mat::col , this is an O(1) operation. /// ## Parameters /// * startcol: An inclusive 0-based start index of the column span. /// * endcol: An exclusive 0-based ending index of the column span. pub fn col_bounds(&self, startcol: i32, endcol: i32) -> Result<core::Mat> { unsafe { sys::cv_Mat_colRange_const_int_int(self.as_raw_Mat(), startcol, endcol) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * r: Range structure containing both the start and the end indices. pub fn col_range(&self, r: &core::Range) -> Result<core::Mat> { unsafe { sys::cv_Mat_colRange_const_Range(self.as_raw_Mat(), r.as_raw_Range()) }.into_result().map(|ptr| core::Mat { ptr }) } /// Extracts a diagonal from a matrix /// /// The method makes a new header for the specified matrix diagonal. The new matrix is represented as a /// single-column matrix. Similarly to Mat::row and Mat::col, this is an O(1) operation. /// ## Parameters /// * d: index of the diagonal, with the following values: /// - `d=0` is the main diagonal. /// - `d<0` is a diagonal from the lower half. For example, d=-1 means the diagonal is set /// immediately below the main one. /// - `d>0` is a diagonal from the upper half. For example, d=1 means the diagonal is set /// immediately above the main one. /// For example: /// ```ignore /// Mat m = (Mat_<int>(3,3) << /// 1,2,3, /// 4,5,6, /// 7,8,9); /// Mat d0 = m.diag(0); /// Mat d1 = m.diag(1); /// Mat d_1 = m.diag(-1); /// ``` /// /// The resulting matrices are /// ```ignore /// d0 = /// [1; /// 5; /// 9] /// d1 = /// [2; /// 6] /// d_1 = /// [4; /// 8] /// ``` /// /// ## C++ default parameters /// * d: 0 pub fn diag(&self, d: i32) -> Result<core::Mat> { unsafe { sys::cv_Mat_diag_const_int(self.as_raw_Mat(), d) }.into_result().map(|ptr| core::Mat { ptr }) } /// creates a diagonal matrix /// /// The method creates a square diagonal matrix from specified main diagonal. /// ## Parameters /// * d: One-dimensional matrix that represents the main diagonal. pub fn diag_new_mat(d: &core::Mat) -> Result<core::Mat> { unsafe { sys::cv_Mat_diag_Mat(d.as_raw_Mat()) }.into_result().map(|ptr| core::Mat { ptr }) } /// Creates a full copy of the array and the underlying data. /// /// The method creates a full copy of the array. The original step[] is not taken into account. So, the /// array copy is a continuous array occupying total()*elemSize() bytes. pub fn clone(&self) -> Result<core::Mat> { unsafe { sys::cv_Mat_clone_const(self.as_raw_Mat()) }.into_result().map(|ptr| core::Mat { ptr }) } /// Copies the matrix to another one. /// /// The method copies the matrix data to another matrix. Before copying the data, the method invokes : /// ```ignore /// m.create(this->size(), this->type()); /// ``` /// /// so that the destination matrix is reallocated if needed. While m.copyTo(m); works flawlessly, the /// function does not handle the case of a partial overlap between the source and the destination /// matrices. /// /// When the operation mask is specified, if the Mat::create call shown above reallocates the matrix, /// the newly allocated matrix is initialized with all zeros before copying the data. /// ## Parameters /// * m: Destination matrix. If it does not have a proper size or type before the operation, it is /// reallocated. pub fn copy_to(&self, m: &mut dyn core::ToOutputArray) -> Result<()> { output_array_arg!(m); unsafe { sys::cv_Mat_copyTo_const__OutputArray(self.as_raw_Mat(), m.as_raw__OutputArray()) }.into_result() } /// ## Parameters /// * m: Destination matrix. If it does not have a proper size or type before the operation, it is /// reallocated. /// * mask: Operation mask of the same size as \*this. Its non-zero elements indicate which matrix /// elements need to be copied. The mask has to be of type CV_8U and can have 1 or multiple channels. pub fn copy_to_masked(&self, m: &mut dyn core::ToOutputArray, mask: &dyn core::ToInputArray) -> Result<()> { output_array_arg!(m); input_array_arg!(mask); unsafe { sys::cv_Mat_copyTo_const__OutputArray__InputArray(self.as_raw_Mat(), m.as_raw__OutputArray(), mask.as_raw__InputArray()) }.into_result() } /// Converts an array to another data type with optional scaling. /// /// The method converts source pixel values to the target data type. saturate_cast\<\> is applied at /// the end to avoid possible overflows: /// ///  /// ## Parameters /// * m: output matrix; if it does not have a proper size or type before the operation, it is /// reallocated. /// * rtype: desired output matrix type or, rather, the depth since the number of channels are the /// same as the input has; if rtype is negative, the output matrix will have the same type as the input. /// * alpha: optional scale factor. /// * beta: optional delta added to the scaled values. /// /// ## C++ default parameters /// * alpha: 1 /// * beta: 0 pub fn convert_to(&self, m: &mut dyn core::ToOutputArray, rtype: i32, alpha: f64, beta: f64) -> Result<()> { output_array_arg!(m); unsafe { sys::cv_Mat_convertTo_const__OutputArray_int_double_double(self.as_raw_Mat(), m.as_raw__OutputArray(), rtype, alpha, beta) }.into_result() } /// Provides a functional form of convertTo. /// /// This is an internally used method called by the @ref MatrixExpressions engine. /// ## Parameters /// * m: Destination array. /// * type: Desired destination array depth (or -1 if it should be the same as the source type). /// /// ## C++ default parameters /// * _type: -1 pub fn assign_to(&self, m: &mut core::Mat, _type: i32) -> Result<()> { unsafe { sys::cv_Mat_assignTo_const_Mat_int(self.as_raw_Mat(), m.as_raw_Mat(), _type) }.into_result() } /// Sets all or some of the array elements to the specified value. /// /// This is an advanced variant of the Mat::operator=(const Scalar& s) operator. /// ## Parameters /// * value: Assigned scalar converted to the actual array type. /// * mask: Operation mask of the same size as \*this. Its non-zero elements indicate which matrix /// elements need to be copied. The mask has to be of type CV_8U and can have 1 or multiple channels /// /// ## C++ default parameters /// * mask: noArray() pub fn set_to(&mut self, value: &dyn core::ToInputArray, mask: &dyn core::ToInputArray) -> Result<core::Mat> { input_array_arg!(value); input_array_arg!(mask); unsafe { sys::cv_Mat_setTo__InputArray__InputArray(self.as_raw_Mat(), value.as_raw__InputArray(), mask.as_raw__InputArray()) }.into_result().map(|ptr| core::Mat { ptr }) } /// Changes the shape and/or the number of channels of a 2D matrix without copying the data. /// /// The method makes a new matrix header for \*this elements. The new matrix may have a different size /// and/or different number of channels. Any combination is possible if: /// * No extra elements are included into the new matrix and no elements are excluded. Consequently, /// the product rows\*cols\*channels() must stay the same after the transformation. /// * No data is copied. That is, this is an O(1) operation. Consequently, if you change the number of /// rows, or the operation changes the indices of elements row in some other way, the matrix must be /// continuous. See Mat::isContinuous . /// /// For example, if there is a set of 3D points stored as an STL vector, and you want to represent the /// points as a 3xN matrix, do the following: /// ```ignore /// std::vector<Point3f> vec; /// ... /// Mat pointMat = Mat(vec). // convert vector to Mat, O(1) operation /// reshape(1). // make Nx3 1-channel matrix out of Nx1 3-channel. /// // Also, an O(1) operation /// t(); // finally, transpose the Nx3 matrix. /// // This involves copying all the elements /// ``` /// /// ## Parameters /// * cn: New number of channels. If the parameter is 0, the number of channels remains the same. /// * rows: New number of rows. If the parameter is 0, the number of rows remains the same. /// /// ## C++ default parameters /// * rows: 0 pub fn reshape(&self, cn: i32, rows: i32) -> Result<core::Mat> { unsafe { sys::cv_Mat_reshape_const_int_int(self.as_raw_Mat(), cn, rows) }.into_result().map(|ptr| core::Mat { ptr }) } pub fn reshape_nd(&self, cn: i32, newshape: &types::VectorOfint) -> Result<core::Mat> { unsafe { sys::cv_Mat_reshape_const_int_VectorOfint(self.as_raw_Mat(), cn, newshape.as_raw_VectorOfint()) }.into_result().map(|ptr| core::Mat { ptr }) } /// Transposes a matrix. /// /// The method performs matrix transposition by means of matrix expressions. It does not perform the /// actual transposition but returns a temporary matrix transposition object that can be further used as /// a part of more complex matrix expressions or can be assigned to a matrix: /// ```ignore /// Mat A1 = A + Mat::eye(A.size(), A.type())*lambda; /// Mat C = A1.t()*A1; // compute (A + lambda*I)^t * (A + lamda*I) /// ``` pub fn t(&self) -> Result<core::MatExpr> { unsafe { sys::cv_Mat_t_const(self.as_raw_Mat()) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// Inverses a matrix. /// /// The method performs a matrix inversion by means of matrix expressions. This means that a temporary /// matrix inversion object is returned by the method and can be used further as a part of more complex /// matrix expressions or can be assigned to a matrix. /// ## Parameters /// * method: Matrix inversion method. One of cv::DecompTypes /// /// ## C++ default parameters /// * method: DECOMP_LU pub fn inv(&self, method: i32) -> Result<core::MatExpr> { unsafe { sys::cv_Mat_inv_const_int(self.as_raw_Mat(), method) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// Performs an element-wise multiplication or division of the two matrices. /// /// The method returns a temporary object encoding per-element array multiplication, with optional /// scale. Note that this is not a matrix multiplication that corresponds to a simpler "\*" operator. /// /// Example: /// ```ignore /// Mat C = A.mul(5/B); // equivalent to divide(A, B, C, 5) /// ``` /// /// ## Parameters /// * m: Another array of the same type and the same size as \*this, or a matrix expression. /// * scale: Optional scale factor. /// /// ## C++ default parameters /// * scale: 1 pub fn mul(&self, m: &dyn core::ToInputArray, scale: f64) -> Result<core::MatExpr> { input_array_arg!(m); unsafe { sys::cv_Mat_mul_const__InputArray_double(self.as_raw_Mat(), m.as_raw__InputArray(), scale) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// Computes a cross-product of two 3-element vectors. /// /// The method computes a cross-product of two 3-element vectors. The vectors must be 3-element /// floating-point vectors of the same shape and size. The result is another 3-element vector of the /// same shape and type as operands. /// ## Parameters /// * m: Another cross-product operand. pub fn cross(&self, m: &dyn core::ToInputArray) -> Result<core::Mat> { input_array_arg!(m); unsafe { sys::cv_Mat_cross_const__InputArray(self.as_raw_Mat(), m.as_raw__InputArray()) }.into_result().map(|ptr| core::Mat { ptr }) } /// Computes a dot-product of two vectors. /// /// The method computes a dot-product of two matrices. If the matrices are not single-column or /// single-row vectors, the top-to-bottom left-to-right scan ordering is used to treat them as 1D /// vectors. The vectors must have the same size and type. If the matrices have more than one channel, /// the dot products from all the channels are summed together. /// ## Parameters /// * m: another dot-product operand. pub fn dot(&self, m: &dyn core::ToInputArray) -> Result<f64> { input_array_arg!(m); unsafe { sys::cv_Mat_dot_const__InputArray(self.as_raw_Mat(), m.as_raw__InputArray()) }.into_result() } /// Returns a zero array of the specified size and type. /// /// The method returns a Matlab-style zero array initializer. It can be used to quickly form a constant /// array as a function parameter, part of a matrix expression, or as a matrix initializer: /// ```ignore /// Mat A; /// A = Mat::zeros(3, 3, CV_32F); /// ``` /// /// In the example above, a new matrix is allocated only if A is not a 3x3 floating-point matrix. /// Otherwise, the existing matrix A is filled with zeros. /// ## Parameters /// * rows: Number of rows. /// * cols: Number of columns. /// * type: Created matrix type. pub fn zeros(rows: i32, cols: i32, _type: i32) -> Result<core::MatExpr> { unsafe { sys::cv_Mat_zeros_int_int_int(rows, cols, _type) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// ## Parameters /// * size: Alternative to the matrix size specification Size(cols, rows) . /// * type: Created matrix type. pub fn zeros_size(size: core::Size, _type: i32) -> Result<core::MatExpr> { unsafe { sys::cv_Mat_zeros_Size_int(size, _type) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// ## Parameters /// * ndims: Array dimensionality. /// * sz: Array of integers specifying the array shape. /// * type: Created matrix type. pub fn zeros_nd(ndims: i32, sz: &[i32], _type: i32) -> Result<core::MatExpr> { unsafe { sys::cv_Mat_zeros_int_const_int_X_int(ndims, sz.as_ptr(), _type) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// Returns an array of all 1's of the specified size and type. /// /// The method returns a Matlab-style 1's array initializer, similarly to Mat::zeros. Note that using /// this method you can initialize an array with an arbitrary value, using the following Matlab idiom: /// ```ignore /// Mat A = Mat::ones(100, 100, CV_8U)*3; // make 100x100 matrix filled with 3. /// ``` /// /// The above operation does not form a 100x100 matrix of 1's and then multiply it by 3. Instead, it /// just remembers the scale factor (3 in this case) and use it when actually invoking the matrix /// initializer. /// /// Note: In case of multi-channels type, only the first channel will be initialized with 1's, the /// others will be set to 0's. /// ## Parameters /// * rows: Number of rows. /// * cols: Number of columns. /// * type: Created matrix type. pub fn ones(rows: i32, cols: i32, _type: i32) -> Result<core::MatExpr> { unsafe { sys::cv_Mat_ones_int_int_int(rows, cols, _type) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// ## Parameters /// * size: Alternative to the matrix size specification Size(cols, rows) . /// * type: Created matrix type. pub fn ones_size(size: core::Size, _type: i32) -> Result<core::MatExpr> { unsafe { sys::cv_Mat_ones_Size_int(size, _type) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// ## Parameters /// * ndims: Array dimensionality. /// * sz: Array of integers specifying the array shape. /// * type: Created matrix type. pub fn ones_nd(ndims: i32, sz: &[i32], _type: i32) -> Result<core::MatExpr> { unsafe { sys::cv_Mat_ones_int_const_int_X_int(ndims, sz.as_ptr(), _type) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// Returns an identity matrix of the specified size and type. /// /// The method returns a Matlab-style identity matrix initializer, similarly to Mat::zeros. Similarly to /// Mat::ones, you can use a scale operation to create a scaled identity matrix efficiently: /// ```ignore /// // make a 4x4 diagonal matrix with 0.1's on the diagonal. /// Mat A = Mat::eye(4, 4, CV_32F)*0.1; /// ``` /// /// /// Note: In case of multi-channels type, identity matrix will be initialized only for the first channel, /// the others will be set to 0's /// ## Parameters /// * rows: Number of rows. /// * cols: Number of columns. /// * type: Created matrix type. pub fn eye(rows: i32, cols: i32, _type: i32) -> Result<core::MatExpr> { unsafe { sys::cv_Mat_eye_int_int_int(rows, cols, _type) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// ## Parameters /// * size: Alternative matrix size specification as Size(cols, rows) . /// * type: Created matrix type. pub fn eye_size(size: core::Size, _type: i32) -> Result<core::MatExpr> { unsafe { sys::cv_Mat_eye_Size_int(size, _type) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// Allocates new array data if needed. /// /// This is one of the key Mat methods. Most new-style OpenCV functions and methods that produce arrays /// call this method for each output array. The method uses the following algorithm: /// /// -# If the current array shape and the type match the new ones, return immediately. Otherwise, /// de-reference the previous data by calling Mat::release. /// -# Initialize the new header. /// -# Allocate the new data of total()\*elemSize() bytes. /// -# Allocate the new, associated with the data, reference counter and set it to 1. /// /// Such a scheme makes the memory management robust and efficient at the same time and helps avoid /// extra typing for you. This means that usually there is no need to explicitly allocate output arrays. /// That is, instead of writing: /// ```ignore /// Mat color; /// ... /// Mat gray(color.rows, color.cols, color.depth()); /// cvtColor(color, gray, COLOR_BGR2GRAY); /// ``` /// /// you can simply write: /// ```ignore /// Mat color; /// ... /// Mat gray; /// cvtColor(color, gray, COLOR_BGR2GRAY); /// ``` /// /// because cvtColor, as well as the most of OpenCV functions, calls Mat::create() for the output array /// internally. /// ## Parameters /// * rows: New number of rows. /// * cols: New number of columns. /// * type: New matrix type. pub unsafe fn create_rows_cols(&mut self, rows: i32, cols: i32, _type: i32) -> Result<()> { { sys::cv_Mat_create_int_int_int(self.as_raw_Mat(), rows, cols, _type) }.into_result() } /// ## Parameters /// * size: Alternative new matrix size specification: Size(cols, rows) /// * type: New matrix type. pub unsafe fn create_size(&mut self, size: core::Size, _type: i32) -> Result<()> { { sys::cv_Mat_create_Size_int(self.as_raw_Mat(), size, _type) }.into_result() } /// ## Parameters /// * sizes: Array of integers specifying a new array shape. /// * type: New matrix type. pub unsafe fn create_nd(&mut self, sizes: &types::VectorOfint, _type: i32) -> Result<()> { { sys::cv_Mat_create_VectorOfint_int(self.as_raw_Mat(), sizes.as_raw_VectorOfint(), _type) }.into_result() } /// Increments the reference counter. /// /// The method increments the reference counter associated with the matrix data. If the matrix header /// points to an external data set (see Mat::Mat ), the reference counter is NULL, and the method has no /// effect in this case. Normally, to avoid memory leaks, the method should not be called explicitly. It /// is called implicitly by the matrix assignment operator. The reference counter increment is an atomic /// operation on the platforms that support it. Thus, it is safe to operate on the same matrices /// asynchronously in different threads. pub fn addref(&mut self) -> Result<()> { unsafe { sys::cv_Mat_addref(self.as_raw_Mat()) }.into_result() } /// Decrements the reference counter and deallocates the matrix if needed. /// /// The method decrements the reference counter associated with the matrix data. When the reference /// counter reaches 0, the matrix data is deallocated and the data and the reference counter pointers /// are set to NULL's. If the matrix header points to an external data set (see Mat::Mat ), the /// reference counter is NULL, and the method has no effect in this case. /// /// This method can be called manually to force the matrix data deallocation. But since this method is /// automatically called in the destructor, or by any other method that changes the data pointer, it is /// usually not needed. The reference counter decrement and check for 0 is an atomic operation on the /// platforms that support it. Thus, it is safe to operate on the same matrices asynchronously in /// different threads. pub fn release(&mut self) -> Result<()> { unsafe { sys::cv_Mat_release(self.as_raw_Mat()) }.into_result() } /// internal use function, consider to use 'release' method instead; deallocates the matrix data pub fn deallocate(&mut self) -> Result<()> { unsafe { sys::cv_Mat_deallocate(self.as_raw_Mat()) }.into_result() } /// Reserves space for the certain number of rows. /// /// The method reserves space for sz rows. If the matrix already has enough space to store sz rows, /// nothing happens. If the matrix is reallocated, the first Mat::rows rows are preserved. The method /// emulates the corresponding method of the STL vector class. /// ## Parameters /// * sz: Number of rows. pub fn reserve(&mut self, sz: size_t) -> Result<()> { unsafe { sys::cv_Mat_reserve_size_t(self.as_raw_Mat(), sz) }.into_result() } /// Reserves space for the certain number of bytes. /// /// The method reserves space for sz bytes. If the matrix already has enough space to store sz bytes, /// nothing happens. If matrix has to be reallocated its previous content could be lost. /// ## Parameters /// * sz: Number of bytes. pub fn reserve_buffer(&mut self, sz: size_t) -> Result<()> { unsafe { sys::cv_Mat_reserveBuffer_size_t(self.as_raw_Mat(), sz) }.into_result() } /// Changes the number of matrix rows. /// /// The methods change the number of matrix rows. If the matrix is reallocated, the first /// min(Mat::rows, sz) rows are preserved. The methods emulate the corresponding methods of the STL /// vector class. /// ## Parameters /// * sz: New number of rows. pub fn resize(&mut self, sz: size_t) -> Result<()> { unsafe { sys::cv_Mat_resize_size_t(self.as_raw_Mat(), sz) }.into_result() } /// ## Parameters /// * sz: New number of rows. /// * s: Value assigned to the newly added elements. pub fn resize_with_default(&mut self, sz: size_t, s: core::Scalar) -> Result<()> { unsafe { sys::cv_Mat_resize_size_t_Scalar(self.as_raw_Mat(), sz, s) }.into_result() } /// ## Parameters /// * m: Added line(s). pub fn push_back(&mut self, m: &core::Mat) -> Result<()> { unsafe { sys::cv_Mat_push_back_Mat(self.as_raw_Mat(), m.as_raw_Mat()) }.into_result() } /// Removes elements from the bottom of the matrix. /// /// The method removes one or more rows from the bottom of the matrix. /// ## Parameters /// * nelems: Number of removed rows. If it is greater than the total number of rows, an exception /// is thrown. /// /// ## C++ default parameters /// * nelems: 1 pub fn pop_back(&mut self, nelems: size_t) -> Result<()> { unsafe { sys::cv_Mat_pop_back_size_t(self.as_raw_Mat(), nelems) }.into_result() } /// Locates the matrix header within a parent matrix. /// /// After you extracted a submatrix from a matrix using Mat::row, Mat::col, Mat::rowRange, /// Mat::colRange, and others, the resultant submatrix points just to the part of the original big /// matrix. However, each submatrix contains information (represented by datastart and dataend /// fields) that helps reconstruct the original matrix size and the position of the extracted /// submatrix within the original matrix. The method locateROI does exactly that. /// ## Parameters /// * wholeSize: Output parameter that contains the size of the whole matrix containing *this* /// as a part. /// * ofs: Output parameter that contains an offset of *this* inside the whole matrix. pub fn locate_roi(&self, whole_size: &mut core::Size, ofs: &mut core::Point) -> Result<()> { unsafe { sys::cv_Mat_locateROI_const_Size_Point(self.as_raw_Mat(), whole_size, ofs) }.into_result() } /// Adjusts a submatrix size and position within the parent matrix. /// /// The method is complimentary to Mat::locateROI . The typical use of these functions is to determine /// the submatrix position within the parent matrix and then shift the position somehow. Typically, it /// can be required for filtering operations when pixels outside of the ROI should be taken into /// account. When all the method parameters are positive, the ROI needs to grow in all directions by the /// specified amount, for example: /// ```ignore /// A.adjustROI(2, 2, 2, 2); /// ``` /// /// In this example, the matrix size is increased by 4 elements in each direction. The matrix is shifted /// by 2 elements to the left and 2 elements up, which brings in all the necessary pixels for the /// filtering with the 5x5 kernel. /// /// adjustROI forces the adjusted ROI to be inside of the parent matrix that is boundaries of the /// adjusted ROI are constrained by boundaries of the parent matrix. For example, if the submatrix A is /// located in the first row of a parent matrix and you called A.adjustROI(2, 2, 2, 2) then A will not /// be increased in the upward direction. /// /// The function is used internally by the OpenCV filtering functions, like filter2D , morphological /// operations, and so on. /// ## Parameters /// * dtop: Shift of the top submatrix boundary upwards. /// * dbottom: Shift of the bottom submatrix boundary downwards. /// * dleft: Shift of the left submatrix boundary to the left. /// * dright: Shift of the right submatrix boundary to the right. /// ## See also /// copyMakeBorder pub fn adjust_roi(&mut self, dtop: i32, dbottom: i32, dleft: i32, dright: i32) -> Result<core::Mat> { unsafe { sys::cv_Mat_adjustROI_int_int_int_int(self.as_raw_Mat(), dtop, dbottom, dleft, dright) }.into_result().map(|ptr| core::Mat { ptr }) } /// Reports whether the matrix is continuous or not. /// /// The method returns true if the matrix elements are stored continuously without gaps at the end of /// each row. Otherwise, it returns false. Obviously, 1x1 or 1xN matrices are always continuous. /// Matrices created with Mat::create are always continuous. But if you extract a part of the matrix /// using Mat::col, Mat::diag, and so on, or constructed a matrix header for externally allocated data, /// such matrices may no longer have this property. /// /// The continuity flag is stored as a bit in the Mat::flags field and is computed automatically when /// you construct a matrix header. Thus, the continuity check is a very fast operation, though /// theoretically it could be done as follows: /// ```ignore /// // alternative implementation of Mat::isContinuous() /// bool myCheckMatContinuity(const Mat& m) /// { /// //return (m.flags & Mat::CONTINUOUS_FLAG) != 0; /// return m.rows == 1 || m.step == m.cols*m.elemSize(); /// } /// ``` /// /// The method is used in quite a few of OpenCV functions. The point is that element-wise operations /// (such as arithmetic and logical operations, math functions, alpha blending, color space /// transformations, and others) do not depend on the image geometry. Thus, if all the input and output /// arrays are continuous, the functions can process them as very long single-row vectors. The example /// below illustrates how an alpha-blending function can be implemented: /// ```ignore /// template<typename T> /// void alphaBlendRGBA(const Mat& src1, const Mat& src2, Mat& dst) /// { /// const float alpha_scale = (float)std::numeric_limits<T>::max(), /// inv_scale = 1.f/alpha_scale; /// /// CV_Assert( src1.type() == src2.type() && /// src1.type() == CV_MAKETYPE(traits::Depth<T>::value, 4) && /// src1.size() == src2.size()); /// Size size = src1.size(); /// dst.create(size, src1.type()); /// /// // here is the idiom: check the arrays for continuity and, /// // if this is the case, /// // treat the arrays as 1D vectors /// if( src1.isContinuous() && src2.isContinuous() && dst.isContinuous() ) /// { /// size.width *= size.height; /// size.height = 1; /// } /// size.width *= 4; /// /// for( int i = 0; i < size.height; i++ ) /// { /// // when the arrays are continuous, /// // the outer loop is executed only once /// const T* ptr1 = src1.ptr<T>(i); /// const T* ptr2 = src2.ptr<T>(i); /// T* dptr = dst.ptr<T>(i); /// /// for( int j = 0; j < size.width; j += 4 ) /// { /// float alpha = ptr1[j+3]*inv_scale, beta = ptr2[j+3]*inv_scale; /// dptr[j] = saturate_cast<T>(ptr1[j]*alpha + ptr2[j]*beta); /// dptr[j+1] = saturate_cast<T>(ptr1[j+1]*alpha + ptr2[j+1]*beta); /// dptr[j+2] = saturate_cast<T>(ptr1[j+2]*alpha + ptr2[j+2]*beta); /// dptr[j+3] = saturate_cast<T>((1 - (1-alpha)*(1-beta))*alpha_scale); /// } /// } /// } /// ``` /// /// This approach, while being very simple, can boost the performance of a simple element-operation by /// 10-20 percents, especially if the image is rather small and the operation is quite simple. /// /// Another OpenCV idiom in this function, a call of Mat::create for the destination array, that /// allocates the destination array unless it already has the proper size and type. And while the newly /// allocated arrays are always continuous, you still need to check the destination array because /// Mat::create does not always allocate a new matrix. pub fn is_continuous(&self) -> Result<bool> { unsafe { sys::cv_Mat_isContinuous_const(self.as_raw_Mat()) }.into_result() } /// returns true if the matrix is a submatrix of another matrix pub fn is_submatrix(&self) -> Result<bool> { unsafe { sys::cv_Mat_isSubmatrix_const(self.as_raw_Mat()) }.into_result() } /// Returns the matrix element size in bytes. /// /// The method returns the matrix element size in bytes. For example, if the matrix type is CV_16SC3 , /// the method returns 3\*sizeof(short) or 6. pub fn elem_size(&self) -> Result<size_t> { unsafe { sys::cv_Mat_elemSize_const(self.as_raw_Mat()) }.into_result() } /// Returns the size of each matrix element channel in bytes. /// /// The method returns the matrix element channel size in bytes, that is, it ignores the number of /// channels. For example, if the matrix type is CV_16SC3 , the method returns sizeof(short) or 2. pub fn elem_size1(&self) -> Result<size_t> { unsafe { sys::cv_Mat_elemSize1_const(self.as_raw_Mat()) }.into_result() } /// Returns the type of a matrix element. /// /// The method returns a matrix element type. This is an identifier compatible with the CvMat type /// system, like CV_16SC3 or 16-bit signed 3-channel array, and so on. pub fn typ(&self) -> Result<i32> { unsafe { sys::cv_Mat_type_const(self.as_raw_Mat()) }.into_result() } /// Returns the depth of a matrix element. /// /// The method returns the identifier of the matrix element depth (the type of each individual channel). /// For example, for a 16-bit signed element array, the method returns CV_16S . A complete list of /// matrix types contains the following values: /// * CV_8U - 8-bit unsigned integers ( 0..255 ) /// * CV_8S - 8-bit signed integers ( -128..127 ) /// * CV_16U - 16-bit unsigned integers ( 0..65535 ) /// * CV_16S - 16-bit signed integers ( -32768..32767 ) /// * CV_32S - 32-bit signed integers ( -2147483648..2147483647 ) /// * CV_32F - 32-bit floating-point numbers ( -FLT_MAX..FLT_MAX, INF, NAN ) /// * CV_64F - 64-bit floating-point numbers ( -DBL_MAX..DBL_MAX, INF, NAN ) pub fn depth(&self) -> Result<i32> { unsafe { sys::cv_Mat_depth_const(self.as_raw_Mat()) }.into_result() } /// Returns the number of matrix channels. /// /// The method returns the number of matrix channels. pub fn channels(&self) -> Result<i32> { unsafe { sys::cv_Mat_channels_const(self.as_raw_Mat()) }.into_result() } /// Returns a normalized step. /// /// The method returns a matrix step divided by Mat::elemSize1() . It can be useful to quickly access an /// arbitrary matrix element. /// /// ## C++ default parameters /// * i: 0 pub fn step1(&self, i: i32) -> Result<size_t> { unsafe { sys::cv_Mat_step1_const_int(self.as_raw_Mat(), i) }.into_result() } /// Returns true if the array has no elements. /// /// The method returns true if Mat::total() is 0 or if Mat::data is NULL. Because of pop_back() and /// resize() methods `M.total() == 0` does not imply that `M.data == NULL`. pub fn empty(&self) -> Result<bool> { unsafe { sys::cv_Mat_empty_const(self.as_raw_Mat()) }.into_result() } /// Returns the total number of array elements. /// /// The method returns the number of array elements (a number of pixels if the array represents an /// image). pub fn total(&self) -> Result<size_t> { unsafe { sys::cv_Mat_total_const(self.as_raw_Mat()) }.into_result() } /// Returns the total number of array elements. /// /// The method returns the number of elements within a certain sub-array slice with startDim <= dim < endDim /// /// ## C++ default parameters /// * end_dim: INT_MAX pub fn total_slice(&self, start_dim: i32, end_dim: i32) -> Result<size_t> { unsafe { sys::cv_Mat_total_const_int_int(self.as_raw_Mat(), start_dim, end_dim) }.into_result() } /// ## Parameters /// * elemChannels: Number of channels or number of columns the matrix should have. /// For a 2-D matrix, when the matrix has only 1 column, then it should have /// elemChannels channels; When the matrix has only 1 channel, /// then it should have elemChannels columns. /// For a 3-D matrix, it should have only one channel. Furthermore, /// if the number of planes is not one, then the number of rows /// within every plane has to be 1; if the number of rows within /// every plane is not 1, then the number of planes has to be 1. /// * depth: The depth the matrix should have. Set it to -1 when any depth is fine. /// * requireContinuous: Set it to true to require the matrix to be continuous /// ## Returns /// -1 if the requirement is not satisfied. /// Otherwise, it returns the number of elements in the matrix. Note /// that an element may have multiple channels. /// /// The following code demonstrates its usage for a 2-d matrix: /// @snippet snippets/core_mat_checkVector.cpp example-2d /// /// The following code demonstrates its usage for a 3-d matrix: /// @snippet snippets/core_mat_checkVector.cpp example-3d /// /// ## C++ default parameters /// * depth: -1 /// * require_continuous: true pub fn check_vector(&self, elem_channels: i32, depth: i32, require_continuous: bool) -> Result<i32> { unsafe { sys::cv_Mat_checkVector_const_int_int_bool(self.as_raw_Mat(), elem_channels, depth, require_continuous) }.into_result() } /// Returns a pointer to the specified matrix row. /// /// The methods return `uchar*` or typed pointer to the specified matrix row. See the sample in /// Mat::isContinuous to know how to use these methods. /// ## Parameters /// * i0: A 0-based row index. /// /// ## C++ default parameters /// * i0: 0 pub unsafe fn ptr_mut(&mut self, i0: i32) -> Result<&mut u8> { { sys::cv_Mat_ptr_int(self.as_raw_Mat(), i0) }.into_result().and_then(|x| { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } /// /// ## C++ default parameters /// * i0: 0 pub unsafe fn ptr(&self, i0: i32) -> Result<&u8> { { sys::cv_Mat_ptr_const_int(self.as_raw_Mat(), i0) }.into_result().and_then(|x| { x.as_ref() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } /// ## Parameters /// * row: Index along the dimension 0 /// * col: Index along the dimension 1 pub unsafe fn ptr_2d_mut(&mut self, row: i32, col: i32) -> Result<&mut u8> { { sys::cv_Mat_ptr_int_int(self.as_raw_Mat(), row, col) }.into_result().and_then(|x| { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } /// ## Parameters /// * row: Index along the dimension 0 /// * col: Index along the dimension 1 pub unsafe fn ptr_2d(&self, row: i32, col: i32) -> Result<&u8> { { sys::cv_Mat_ptr_const_int_int(self.as_raw_Mat(), row, col) }.into_result().and_then(|x| { x.as_ref() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } pub unsafe fn ptr_3d_mut(&mut self, i0: i32, i1: i32, i2: i32) -> Result<&mut u8> { { sys::cv_Mat_ptr_int_int_int(self.as_raw_Mat(), i0, i1, i2) }.into_result().and_then(|x| { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } pub unsafe fn ptr_3d(&self, i0: i32, i1: i32, i2: i32) -> Result<&u8> { { sys::cv_Mat_ptr_const_int_int_int(self.as_raw_Mat(), i0, i1, i2) }.into_result().and_then(|x| { x.as_ref() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } pub unsafe fn ptr_nd_mut(&mut self, idx: &[i32]) -> Result<&mut u8> { { sys::cv_Mat_ptr_const_int_X(self.as_raw_Mat(), idx.as_ptr()) }.into_result().and_then(|x| { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } pub unsafe fn ptr_nd(&self, idx: &[i32]) -> Result<&u8> { { sys::cv_Mat_ptr_const_const_int_X(self.as_raw_Mat(), idx.as_ptr()) }.into_result().and_then(|x| { x.as_ref() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } /// Returns a reference to the specified array element. /// /// The template methods return a reference to the specified array element. For the sake of higher /// performance, the index range checks are only performed in the Debug configuration. /// /// Note that the variants with a single index (i) can be used to access elements of single-row or /// single-column 2-dimensional arrays. That is, if, for example, A is a 1 x N floating-point matrix and /// B is an M x 1 integer matrix, you can simply write `A.at<float>(k+4)` and `B.at<int>(2*i+1)` /// instead of `A.at<float>(0,k+4)` and `B.at<int>(2*i+1,0)`, respectively. /// /// The example below initializes a Hilbert matrix: /// ```ignore /// Mat H(100, 100, CV_64F); /// for(int i = 0; i < H.rows; i++) /// for(int j = 0; j < H.cols; j++) /// H.at<double>(i,j)=1./(i+j+1); /// ``` /// /// /// Keep in mind that the size identifier used in the at operator cannot be chosen at random. It depends /// on the image from which you are trying to retrieve the data. The table below gives a better insight in this: /// - If matrix is of type `CV_8U` then use `Mat.at<uchar>(y,x)`. /// - If matrix is of type `CV_8S` then use `Mat.at<schar>(y,x)`. /// - If matrix is of type `CV_16U` then use `Mat.at<ushort>(y,x)`. /// - If matrix is of type `CV_16S` then use `Mat.at<short>(y,x)`. /// - If matrix is of type `CV_32S` then use `Mat.at<int>(y,x)`. /// - If matrix is of type `CV_32F` then use `Mat.at<float>(y,x)`. /// - If matrix is of type `CV_64F` then use `Mat.at<double>(y,x)`. /// /// ## Parameters /// * i0: Index along the dimension 0 /// /// ## C++ default parameters /// * i0: 0 pub fn at_mut<T: core::DataType>(&mut self, i0: i32) -> Result<&mut T> { self._at_mut(i0) } /// ## Parameters /// * i0: Index along the dimension 0 /// /// ## C++ default parameters /// * i0: 0 pub fn at<T: core::DataType>(&self, i0: i32) -> Result<&T> { self._at(i0) } /// ## Parameters /// * row: Index along the dimension 0 /// * col: Index along the dimension 1 pub fn at_2d_mut<T: core::DataType>(&mut self, row: i32, col: i32) -> Result<&mut T> { self._at_2d_mut(row, col) } /// ## Parameters /// * row: Index along the dimension 0 /// * col: Index along the dimension 1 pub fn at_2d<T: core::DataType>(&self, row: i32, col: i32) -> Result<&T> { self._at_2d(row, col) } /// ## Parameters /// * i0: Index along the dimension 0 /// * i1: Index along the dimension 1 /// * i2: Index along the dimension 2 pub fn at_3d_mut<T: core::DataType>(&mut self, i0: i32, i1: i32, i2: i32) -> Result<&mut T> { self._at_3d_mut(i0, i1, i2) } /// ## Parameters /// * i0: Index along the dimension 0 /// * i1: Index along the dimension 1 /// * i2: Index along the dimension 2 pub fn at_3d<T: core::DataType>(&self, i0: i32, i1: i32, i2: i32) -> Result<&T> { self._at_3d(i0, i1, i2) } /// ## Parameters /// * idx: Array of Mat::dims indices. pub fn at_nd_mut<T: core::DataType>(&mut self, idx: &[i32]) -> Result<&mut T> { self._at_nd_mut(idx) } /// ## Parameters /// * idx: Array of Mat::dims indices. pub fn at_nd<T: core::DataType>(&self, idx: &[i32]) -> Result<&T> { self._at_nd(idx) } /// internal use method: updates the continuity flag pub fn update_continuity_flag(&mut self) -> Result<()> { unsafe { sys::cv_Mat_updateContinuityFlag(self.as_raw_Mat()) }.into_result() } } // boxed class cv::MatConstIterator pub struct MatConstIterator { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for MatConstIterator { fn drop(&mut self) { unsafe { sys::cv_MatConstIterator_delete(self.ptr) }; } } impl MatConstIterator { #[inline(always)] pub fn as_raw_MatConstIterator(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for MatConstIterator {} impl MatConstIterator { /// default constructor pub fn default() -> Result<core::MatConstIterator> { unsafe { sys::cv_MatConstIterator_MatConstIterator() }.into_result().map(|ptr| core::MatConstIterator { ptr }) } /// constructor that sets the iterator to the beginning of the matrix pub fn over(_m: &core::Mat) -> Result<core::MatConstIterator> { unsafe { sys::cv_MatConstIterator_MatConstIterator_const_Mat(_m.as_raw_Mat()) }.into_result().map(|ptr| core::MatConstIterator { ptr }) } /// constructor that sets the iterator to the specified element of the matrix /// /// ## C++ default parameters /// * _col: 0 pub fn with_rows_cols(_m: &core::Mat, _row: i32, _col: i32) -> Result<core::MatConstIterator> { unsafe { sys::cv_MatConstIterator_MatConstIterator_const_Mat_int_int(_m.as_raw_Mat(), _row, _col) }.into_result().map(|ptr| core::MatConstIterator { ptr }) } /// constructor that sets the iterator to the specified element of the matrix pub fn with_start(_m: &core::Mat, _pt: core::Point) -> Result<core::MatConstIterator> { unsafe { sys::cv_MatConstIterator_MatConstIterator_const_Mat_Point(_m.as_raw_Mat(), _pt) }.into_result().map(|ptr| core::MatConstIterator { ptr }) } /// copy constructor pub fn copy(it: &core::MatConstIterator) -> Result<core::MatConstIterator> { unsafe { sys::cv_MatConstIterator_MatConstIterator_MatConstIterator(it.as_raw_MatConstIterator()) }.into_result().map(|ptr| core::MatConstIterator { ptr }) } /// returns the current iterator position pub fn pos(&self) -> Result<core::Point> { unsafe { sys::cv_MatConstIterator_pos_const(self.as_raw_MatConstIterator()) }.into_result() } /// returns the current iterator position pub fn pos_to(&self, _idx: &mut i32) -> Result<()> { unsafe { sys::cv_MatConstIterator_pos_const_int_X(self.as_raw_MatConstIterator(), _idx) }.into_result() } pub fn lpos(&self) -> Result<ptrdiff_t> { unsafe { sys::cv_MatConstIterator_lpos_const(self.as_raw_MatConstIterator()) }.into_result() } /// /// ## C++ default parameters /// * relative: false pub fn seek(&mut self, ofs: ptrdiff_t, relative: bool) -> Result<()> { unsafe { sys::cv_MatConstIterator_seek_ptrdiff_t_bool(self.as_raw_MatConstIterator(), ofs, relative) }.into_result() } /// /// ## C++ default parameters /// * relative: false pub fn seek_idx(&mut self, _idx: &i32, relative: bool) -> Result<()> { unsafe { sys::cv_MatConstIterator_seek_const_int_X_bool(self.as_raw_MatConstIterator(), _idx, relative) }.into_result() } } // boxed class cv::MatExpr /// Matrix expression representation /// @anchor MatrixExpressions /// This is a list of implemented matrix operations that can be combined in arbitrary complex /// expressions (here A, B stand for matrices ( Mat ), s for a scalar ( Scalar ), alpha for a /// real-valued scalar ( double )): /// * Addition, subtraction, negation: `A+B`, `A-B`, `A+s`, `A-s`, `s+A`, `s-A`, `-A` /// * Scaling: `A*alpha` /// * Per-element multiplication and division: `A.mul(B)`, `A/B`, `alpha/A` /// * Matrix multiplication: `A*B` /// * Transposition: `A.t()` (means A<sup>T</sup>) /// * Matrix inversion and pseudo-inversion, solving linear systems and least-squares problems: /// `A.inv([method]) (~ A<sup>-1</sup>)`, `A.inv([method])*B (~ X: AX=B)` /// * Comparison: `A cmpop B`, `A cmpop alpha`, `alpha cmpop A`, where *cmpop* is one of /// `>`, `>=`, `==`, `!=`, `<=`, `<`. The result of comparison is an 8-bit single channel mask whose /// elements are set to 255 (if the particular element or pair of elements satisfy the condition) or /// 0. /// * Bitwise logical operations: `A logicop B`, `A logicop s`, `s logicop A`, `~A`, where *logicop* is one of /// `&`, `|`, `^`. /// * Element-wise minimum and maximum: `min(A, B)`, `min(A, alpha)`, `max(A, B)`, `max(A, alpha)` /// * Element-wise absolute value: `abs(A)` /// * Cross-product, dot-product: `A.cross(B)`, `A.dot(B)` /// * Any function of matrix or matrices and scalars that returns a matrix or a scalar, such as norm, /// mean, sum, countNonZero, trace, determinant, repeat, and others. /// * Matrix initializers ( Mat::eye(), Mat::zeros(), Mat::ones() ), matrix comma-separated /// initializers, matrix constructors and operators that extract sub-matrices (see Mat description). /// * Mat_<destination_type>() constructors to cast the result to the proper type. /// /// Note: Comma-separated initializers and probably some other operations may require additional /// explicit Mat() or Mat_<T>() constructor calls to resolve a possible ambiguity. /// /// Here are examples of matrix expressions: /// ```ignore /// // compute pseudo-inverse of A, equivalent to A.inv(DECOMP_SVD) /// SVD svd(A); /// Mat pinvA = svd.vt.t()*Mat::diag(1./svd.w)*svd.u.t(); /// /// // compute the new vector of parameters in the Levenberg-Marquardt algorithm /// x -= (A.t()*A + lambda*Mat::eye(A.cols,A.cols,A.type())).inv(DECOMP_CHOLESKY)*(A.t()*err); /// /// // sharpen image using "unsharp mask" algorithm /// Mat blurred; double sigma = 1, threshold = 5, amount = 1; /// GaussianBlur(img, blurred, Size(), sigma, sigma); /// Mat lowContrastMask = abs(img - blurred) < threshold; /// Mat sharpened = img*(1+amount) + blurred*(-amount); /// img.copyTo(sharpened, lowContrastMask); /// ``` pub struct MatExpr { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for MatExpr { fn drop(&mut self) { unsafe { sys::cv_MatExpr_delete(self.ptr) }; } } impl MatExpr { #[inline(always)] pub fn as_raw_MatExpr(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for MatExpr {} impl MatExpr { pub fn default() -> Result<core::MatExpr> { unsafe { sys::cv_MatExpr_MatExpr() }.into_result().map(|ptr| core::MatExpr { ptr }) } pub fn from_mat(m: &core::Mat) -> Result<core::MatExpr> { unsafe { sys::cv_MatExpr_MatExpr_Mat(m.as_raw_Mat()) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// /// ## C++ default parameters /// * _a: Mat() /// * _b: Mat() /// * _c: Mat() /// * _alpha: 1 /// * _beta: 1 /// * _s: Scalar() pub fn new(_op: &dyn core::MatOp, _flags: i32, _a: &core::Mat, _b: &core::Mat, _c: &core::Mat, _alpha: f64, _beta: f64, _s: core::Scalar) -> Result<core::MatExpr> { unsafe { sys::cv_MatExpr_MatExpr_const_MatOp_int_Mat_Mat_Mat_double_double_Scalar(_op.as_raw_MatOp(), _flags, _a.as_raw_Mat(), _b.as_raw_Mat(), _c.as_raw_Mat(), _alpha, _beta, _s) }.into_result().map(|ptr| core::MatExpr { ptr }) } pub fn to_mat(&self) -> Result<core::Mat> { unsafe { sys::cv_MatExpr_operator_Mat_const(self.as_raw_MatExpr()) }.into_result().map(|ptr| core::Mat { ptr }) } pub fn size(&self) -> Result<core::Size> { unsafe { sys::cv_MatExpr_size_const(self.as_raw_MatExpr()) }.into_result() } pub fn typ(&self) -> Result<i32> { unsafe { sys::cv_MatExpr_type_const(self.as_raw_MatExpr()) }.into_result() } pub fn row(&self, y: i32) -> Result<core::MatExpr> { unsafe { sys::cv_MatExpr_row_const_int(self.as_raw_MatExpr(), y) }.into_result().map(|ptr| core::MatExpr { ptr }) } pub fn col(&self, x: i32) -> Result<core::MatExpr> { unsafe { sys::cv_MatExpr_col_const_int(self.as_raw_MatExpr(), x) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// /// ## C++ default parameters /// * d: 0 pub fn diag(&self, d: i32) -> Result<core::MatExpr> { unsafe { sys::cv_MatExpr_diag_const_int(self.as_raw_MatExpr(), d) }.into_result().map(|ptr| core::MatExpr { ptr }) } pub fn t(&self) -> Result<core::MatExpr> { unsafe { sys::cv_MatExpr_t_const(self.as_raw_MatExpr()) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// /// ## C++ default parameters /// * method: DECOMP_LU pub fn inv(&self, method: i32) -> Result<core::MatExpr> { unsafe { sys::cv_MatExpr_inv_const_int(self.as_raw_MatExpr(), method) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// /// ## C++ default parameters /// * scale: 1 pub fn mul_matexpr(&self, e: &core::MatExpr, scale: f64) -> Result<core::MatExpr> { unsafe { sys::cv_MatExpr_mul_const_MatExpr_double(self.as_raw_MatExpr(), e.as_raw_MatExpr(), scale) }.into_result().map(|ptr| core::MatExpr { ptr }) } /// /// ## C++ default parameters /// * scale: 1 pub fn mul(&self, m: &core::Mat, scale: f64) -> Result<core::MatExpr> { unsafe { sys::cv_MatExpr_mul_const_Mat_double(self.as_raw_MatExpr(), m.as_raw_Mat(), scale) }.into_result().map(|ptr| core::MatExpr { ptr }) } pub fn cross(&self, m: &core::Mat) -> Result<core::Mat> { unsafe { sys::cv_MatExpr_cross_const_Mat(self.as_raw_MatExpr(), m.as_raw_Mat()) }.into_result().map(|ptr| core::Mat { ptr }) } pub fn dot(&self, m: &core::Mat) -> Result<f64> { unsafe { sys::cv_MatExpr_dot_const_Mat(self.as_raw_MatExpr(), m.as_raw_Mat()) }.into_result() } } // Generating impl for trait core::MatOp pub trait MatOp { #[inline(always)] fn as_raw_MatOp(&self) -> *mut c_void; fn element_wise(&self, expr: &core::MatExpr) -> Result<bool> { unsafe { sys::cv_MatOp_elementWise_const_MatExpr(self.as_raw_MatOp(), expr.as_raw_MatExpr()) }.into_result() } /// /// ## C++ default parameters /// * _type: -1 fn assign(&self, expr: &core::MatExpr, m: &mut core::Mat, _type: i32) -> Result<()> { unsafe { sys::cv_MatOp_assign_const_MatExpr_Mat_int(self.as_raw_MatOp(), expr.as_raw_MatExpr(), m.as_raw_Mat(), _type) }.into_result() } fn roi(&self, expr: &core::MatExpr, row_range: &core::Range, col_range: &core::Range, res: &mut core::MatExpr) -> Result<()> { unsafe { sys::cv_MatOp_roi_const_MatExpr_Range_Range_MatExpr(self.as_raw_MatOp(), expr.as_raw_MatExpr(), row_range.as_raw_Range(), col_range.as_raw_Range(), res.as_raw_MatExpr()) }.into_result() } fn diag(&self, expr: &core::MatExpr, d: i32, res: &mut core::MatExpr) -> Result<()> { unsafe { sys::cv_MatOp_diag_const_MatExpr_int_MatExpr(self.as_raw_MatOp(), expr.as_raw_MatExpr(), d, res.as_raw_MatExpr()) }.into_result() } fn aug_assign_add(&self, expr: &core::MatExpr, m: &mut core::Mat) -> Result<()> { unsafe { sys::cv_MatOp_augAssignAdd_const_MatExpr_Mat(self.as_raw_MatOp(), expr.as_raw_MatExpr(), m.as_raw_Mat()) }.into_result() } fn aug_assign_subtract(&self, expr: &core::MatExpr, m: &mut core::Mat) -> Result<()> { unsafe { sys::cv_MatOp_augAssignSubtract_const_MatExpr_Mat(self.as_raw_MatOp(), expr.as_raw_MatExpr(), m.as_raw_Mat()) }.into_result() } fn aug_assign_multiply(&self, expr: &core::MatExpr, m: &mut core::Mat) -> Result<()> { unsafe { sys::cv_MatOp_augAssignMultiply_const_MatExpr_Mat(self.as_raw_MatOp(), expr.as_raw_MatExpr(), m.as_raw_Mat()) }.into_result() } fn aug_assign_divide(&self, expr: &core::MatExpr, m: &mut core::Mat) -> Result<()> { unsafe { sys::cv_MatOp_augAssignDivide_const_MatExpr_Mat(self.as_raw_MatOp(), expr.as_raw_MatExpr(), m.as_raw_Mat()) }.into_result() } fn aug_assign_and(&self, expr: &core::MatExpr, m: &mut core::Mat) -> Result<()> { unsafe { sys::cv_MatOp_augAssignAnd_const_MatExpr_Mat(self.as_raw_MatOp(), expr.as_raw_MatExpr(), m.as_raw_Mat()) }.into_result() } fn aug_assign_or(&self, expr: &core::MatExpr, m: &mut core::Mat) -> Result<()> { unsafe { sys::cv_MatOp_augAssignOr_const_MatExpr_Mat(self.as_raw_MatOp(), expr.as_raw_MatExpr(), m.as_raw_Mat()) }.into_result() } fn aug_assign_xor(&self, expr: &core::MatExpr, m: &mut core::Mat) -> Result<()> { unsafe { sys::cv_MatOp_augAssignXor_const_MatExpr_Mat(self.as_raw_MatOp(), expr.as_raw_MatExpr(), m.as_raw_Mat()) }.into_result() } fn add(&self, expr1: &core::MatExpr, expr2: &core::MatExpr, res: &mut core::MatExpr) -> Result<()> { unsafe { sys::cv_MatOp_add_const_MatExpr_MatExpr_MatExpr(self.as_raw_MatOp(), expr1.as_raw_MatExpr(), expr2.as_raw_MatExpr(), res.as_raw_MatExpr()) }.into_result() } fn add_scalar(&self, expr1: &core::MatExpr, s: core::Scalar, res: &mut core::MatExpr) -> Result<()> { unsafe { sys::cv_MatOp_add_const_MatExpr_Scalar_MatExpr(self.as_raw_MatOp(), expr1.as_raw_MatExpr(), s, res.as_raw_MatExpr()) }.into_result() } fn subtract(&self, expr1: &core::MatExpr, expr2: &core::MatExpr, res: &mut core::MatExpr) -> Result<()> { unsafe { sys::cv_MatOp_subtract_const_MatExpr_MatExpr_MatExpr(self.as_raw_MatOp(), expr1.as_raw_MatExpr(), expr2.as_raw_MatExpr(), res.as_raw_MatExpr()) }.into_result() } fn subtract_scalar(&self, s: core::Scalar, expr: &core::MatExpr, res: &mut core::MatExpr) -> Result<()> { unsafe { sys::cv_MatOp_subtract_const_Scalar_MatExpr_MatExpr(self.as_raw_MatOp(), s, expr.as_raw_MatExpr(), res.as_raw_MatExpr()) }.into_result() } /// /// ## C++ default parameters /// * scale: 1 fn multiply(&self, expr1: &core::MatExpr, expr2: &core::MatExpr, res: &mut core::MatExpr, scale: f64) -> Result<()> { unsafe { sys::cv_MatOp_multiply_const_MatExpr_MatExpr_MatExpr_double(self.as_raw_MatOp(), expr1.as_raw_MatExpr(), expr2.as_raw_MatExpr(), res.as_raw_MatExpr(), scale) }.into_result() } fn multiply_f64(&self, expr1: &core::MatExpr, s: f64, res: &mut core::MatExpr) -> Result<()> { unsafe { sys::cv_MatOp_multiply_const_MatExpr_double_MatExpr(self.as_raw_MatOp(), expr1.as_raw_MatExpr(), s, res.as_raw_MatExpr()) }.into_result() } /// /// ## C++ default parameters /// * scale: 1 fn divide(&self, expr1: &core::MatExpr, expr2: &core::MatExpr, res: &mut core::MatExpr, scale: f64) -> Result<()> { unsafe { sys::cv_MatOp_divide_const_MatExpr_MatExpr_MatExpr_double(self.as_raw_MatOp(), expr1.as_raw_MatExpr(), expr2.as_raw_MatExpr(), res.as_raw_MatExpr(), scale) }.into_result() } fn divide_f64(&self, s: f64, expr: &core::MatExpr, res: &mut core::MatExpr) -> Result<()> { unsafe { sys::cv_MatOp_divide_const_double_MatExpr_MatExpr(self.as_raw_MatOp(), s, expr.as_raw_MatExpr(), res.as_raw_MatExpr()) }.into_result() } fn abs(&self, expr: &core::MatExpr, res: &mut core::MatExpr) -> Result<()> { unsafe { sys::cv_MatOp_abs_const_MatExpr_MatExpr(self.as_raw_MatOp(), expr.as_raw_MatExpr(), res.as_raw_MatExpr()) }.into_result() } fn transpose(&self, expr: &core::MatExpr, res: &mut core::MatExpr) -> Result<()> { unsafe { sys::cv_MatOp_transpose_const_MatExpr_MatExpr(self.as_raw_MatOp(), expr.as_raw_MatExpr(), res.as_raw_MatExpr()) }.into_result() } fn matmul(&self, expr1: &core::MatExpr, expr2: &core::MatExpr, res: &mut core::MatExpr) -> Result<()> { unsafe { sys::cv_MatOp_matmul_const_MatExpr_MatExpr_MatExpr(self.as_raw_MatOp(), expr1.as_raw_MatExpr(), expr2.as_raw_MatExpr(), res.as_raw_MatExpr()) }.into_result() } fn invert(&self, expr: &core::MatExpr, method: i32, res: &mut core::MatExpr) -> Result<()> { unsafe { sys::cv_MatOp_invert_const_MatExpr_int_MatExpr(self.as_raw_MatOp(), expr.as_raw_MatExpr(), method, res.as_raw_MatExpr()) }.into_result() } fn size(&self, expr: &core::MatExpr) -> Result<core::Size> { unsafe { sys::cv_MatOp_size_const_MatExpr(self.as_raw_MatOp(), expr.as_raw_MatExpr()) }.into_result() } fn typ(&self, expr: &core::MatExpr) -> Result<i32> { unsafe { sys::cv_MatOp_type_const_MatExpr(self.as_raw_MatOp(), expr.as_raw_MatExpr()) }.into_result() } } // boxed class cv::MatSize pub struct MatSize { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for MatSize { fn drop(&mut self) { unsafe { sys::cv_MatSize_delete(self.ptr) }; } } impl MatSize { #[inline(always)] pub fn as_raw_MatSize(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for MatSize {} impl MatSize { pub fn new(_p: &mut i32) -> Result<core::MatSize> { unsafe { sys::cv_MatSize_MatSize_int_X(_p) }.into_result().map(|ptr| core::MatSize { ptr }) } pub fn dims(&self) -> Result<i32> { unsafe { sys::cv_MatSize_dims_const(self.as_raw_MatSize()) }.into_result() } } // boxed class cv::MatStep pub struct MatStep { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for MatStep { fn drop(&mut self) { unsafe { sys::cv_MatStep_delete(self.ptr) }; } } impl MatStep { #[inline(always)] pub fn as_raw_MatStep(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for MatStep {} impl MatStep { pub fn default() -> Result<core::MatStep> { unsafe { sys::cv_MatStep_MatStep() }.into_result().map(|ptr| core::MatStep { ptr }) } pub fn new(s: size_t) -> Result<core::MatStep> { unsafe { sys::cv_MatStep_MatStep_size_t(s) }.into_result().map(|ptr| core::MatStep { ptr }) } pub fn to_size_t(&self) -> Result<size_t> { unsafe { sys::cv_MatStep_operator_size_t_const(self.as_raw_MatStep()) }.into_result() } } // boxed class cv::Matx_AddOp /// @cond IGNORED pub struct Matx_AddOp { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Matx_AddOp { fn drop(&mut self) { unsafe { sys::cv_Matx_AddOp_delete(self.ptr) }; } } impl Matx_AddOp { #[inline(always)] pub fn as_raw_Matx_AddOp(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Matx_AddOp {} impl Matx_AddOp { pub fn default() -> Result<core::Matx_AddOp> { unsafe { sys::cv_Matx_AddOp_Matx_AddOp() }.into_result().map(|ptr| core::Matx_AddOp { ptr }) } pub fn copy(unnamed_arg: &core::Matx_AddOp) -> Result<core::Matx_AddOp> { unsafe { sys::cv_Matx_AddOp_Matx_AddOp_Matx_AddOp(unnamed_arg.as_raw_Matx_AddOp()) }.into_result().map(|ptr| core::Matx_AddOp { ptr }) } } // boxed class cv::Matx_DivOp pub struct Matx_DivOp { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Matx_DivOp { fn drop(&mut self) { unsafe { sys::cv_Matx_DivOp_delete(self.ptr) }; } } impl Matx_DivOp { #[inline(always)] pub fn as_raw_Matx_DivOp(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Matx_DivOp {} impl Matx_DivOp { pub fn default() -> Result<core::Matx_DivOp> { unsafe { sys::cv_Matx_DivOp_Matx_DivOp() }.into_result().map(|ptr| core::Matx_DivOp { ptr }) } pub fn copy(unnamed_arg: &core::Matx_DivOp) -> Result<core::Matx_DivOp> { unsafe { sys::cv_Matx_DivOp_Matx_DivOp_Matx_DivOp(unnamed_arg.as_raw_Matx_DivOp()) }.into_result().map(|ptr| core::Matx_DivOp { ptr }) } } // boxed class cv::Matx_MatMulOp pub struct Matx_MatMulOp { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Matx_MatMulOp { fn drop(&mut self) { unsafe { sys::cv_Matx_MatMulOp_delete(self.ptr) }; } } impl Matx_MatMulOp { #[inline(always)] pub fn as_raw_Matx_MatMulOp(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Matx_MatMulOp {} impl Matx_MatMulOp { pub fn default() -> Result<core::Matx_MatMulOp> { unsafe { sys::cv_Matx_MatMulOp_Matx_MatMulOp() }.into_result().map(|ptr| core::Matx_MatMulOp { ptr }) } pub fn copy(unnamed_arg: &core::Matx_MatMulOp) -> Result<core::Matx_MatMulOp> { unsafe { sys::cv_Matx_MatMulOp_Matx_MatMulOp_Matx_MatMulOp(unnamed_arg.as_raw_Matx_MatMulOp()) }.into_result().map(|ptr| core::Matx_MatMulOp { ptr }) } } // boxed class cv::Matx_MulOp pub struct Matx_MulOp { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Matx_MulOp { fn drop(&mut self) { unsafe { sys::cv_Matx_MulOp_delete(self.ptr) }; } } impl Matx_MulOp { #[inline(always)] pub fn as_raw_Matx_MulOp(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Matx_MulOp {} impl Matx_MulOp { pub fn default() -> Result<core::Matx_MulOp> { unsafe { sys::cv_Matx_MulOp_Matx_MulOp() }.into_result().map(|ptr| core::Matx_MulOp { ptr }) } pub fn copy(unnamed_arg: &core::Matx_MulOp) -> Result<core::Matx_MulOp> { unsafe { sys::cv_Matx_MulOp_Matx_MulOp_Matx_MulOp(unnamed_arg.as_raw_Matx_MulOp()) }.into_result().map(|ptr| core::Matx_MulOp { ptr }) } } // boxed class cv::Matx_ScaleOp pub struct Matx_ScaleOp { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Matx_ScaleOp { fn drop(&mut self) { unsafe { sys::cv_Matx_ScaleOp_delete(self.ptr) }; } } impl Matx_ScaleOp { #[inline(always)] pub fn as_raw_Matx_ScaleOp(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Matx_ScaleOp {} impl Matx_ScaleOp { pub fn default() -> Result<core::Matx_ScaleOp> { unsafe { sys::cv_Matx_ScaleOp_Matx_ScaleOp() }.into_result().map(|ptr| core::Matx_ScaleOp { ptr }) } pub fn copy(unnamed_arg: &core::Matx_ScaleOp) -> Result<core::Matx_ScaleOp> { unsafe { sys::cv_Matx_ScaleOp_Matx_ScaleOp_Matx_ScaleOp(unnamed_arg.as_raw_Matx_ScaleOp()) }.into_result().map(|ptr| core::Matx_ScaleOp { ptr }) } } // boxed class cv::Matx_SubOp pub struct Matx_SubOp { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Matx_SubOp { fn drop(&mut self) { unsafe { sys::cv_Matx_SubOp_delete(self.ptr) }; } } impl Matx_SubOp { #[inline(always)] pub fn as_raw_Matx_SubOp(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Matx_SubOp {} impl Matx_SubOp { pub fn default() -> Result<core::Matx_SubOp> { unsafe { sys::cv_Matx_SubOp_Matx_SubOp() }.into_result().map(|ptr| core::Matx_SubOp { ptr }) } pub fn copy(unnamed_arg: &core::Matx_SubOp) -> Result<core::Matx_SubOp> { unsafe { sys::cv_Matx_SubOp_Matx_SubOp_Matx_SubOp(unnamed_arg.as_raw_Matx_SubOp()) }.into_result().map(|ptr| core::Matx_SubOp { ptr }) } } // boxed class cv::Matx_TOp pub struct Matx_TOp { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Matx_TOp { fn drop(&mut self) { unsafe { sys::cv_Matx_TOp_delete(self.ptr) }; } } impl Matx_TOp { #[inline(always)] pub fn as_raw_Matx_TOp(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Matx_TOp {} impl Matx_TOp { pub fn default() -> Result<core::Matx_TOp> { unsafe { sys::cv_Matx_TOp_Matx_TOp() }.into_result().map(|ptr| core::Matx_TOp { ptr }) } pub fn copy(unnamed_arg: &core::Matx_TOp) -> Result<core::Matx_TOp> { unsafe { sys::cv_Matx_TOp_Matx_TOp_Matx_TOp(unnamed_arg.as_raw_Matx_TOp()) }.into_result().map(|ptr| core::Matx_TOp { ptr }) } } // Generating impl for trait core::MinProblemSolver /// Basic interface for all solvers pub trait MinProblemSolver: core::AlgorithmTrait { #[inline(always)] fn as_raw_MinProblemSolver(&self) -> *mut c_void; /// Getter for the optimized function. /// /// The optimized function is represented by Function interface, which requires derivatives to /// implement the calc(double*) and getDim() methods to evaluate the function. /// /// ## Returns /// Smart-pointer to an object that implements Function interface - it represents the /// function that is being optimized. It can be empty, if no function was given so far. fn get_function(&self) -> Result<types::PtrOfFunction> { unsafe { sys::cv_MinProblemSolver_getFunction_const(self.as_raw_MinProblemSolver()) }.into_result().map(|ptr| types::PtrOfFunction { ptr }) } /// Setter for the optimized function. /// /// *It should be called at least once before the call to* minimize(), as default value is not usable. /// /// ## Parameters /// * f: The new function to optimize. fn set_function(&mut self, f: &types::PtrOfFunction) -> Result<()> { unsafe { sys::cv_MinProblemSolver_setFunction_PtrOfFunction(self.as_raw_MinProblemSolver(), f.as_raw_PtrOfFunction()) }.into_result() } /// Getter for the previously set terminal criteria for this algorithm. /// /// ## Returns /// Deep copy of the terminal criteria used at the moment. fn get_term_criteria(&self) -> Result<core::TermCriteria> { unsafe { sys::cv_MinProblemSolver_getTermCriteria_const(self.as_raw_MinProblemSolver()) }.into_result().map(|ptr| core::TermCriteria { ptr }) } /// Set terminal criteria for solver. /// /// This method *is not necessary* to be called before the first call to minimize(), as the default /// value is sensible. /// /// Algorithm stops when the number of function evaluations done exceeds termcrit.maxCount, when /// the function values at the vertices of simplex are within termcrit.epsilon range or simplex /// becomes so small that it can enclosed in a box with termcrit.epsilon sides, whatever comes /// first. /// ## Parameters /// * termcrit: Terminal criteria to be used, represented as cv::TermCriteria structure. fn set_term_criteria(&mut self, termcrit: &core::TermCriteria) -> Result<()> { unsafe { sys::cv_MinProblemSolver_setTermCriteria_TermCriteria(self.as_raw_MinProblemSolver(), termcrit.as_raw_TermCriteria()) }.into_result() } /// actually runs the algorithm and performs the minimization. /// /// The sole input parameter determines the centroid of the starting simplex (roughly, it tells /// where to start), all the others (terminal criteria, initial step, function to be minimized) are /// supposed to be set via the setters before the call to this method or the default values (not /// always sensible) will be used. /// /// ## Parameters /// * x: The initial point, that will become a centroid of an initial simplex. After the algorithm /// will terminate, it will be set to the point where the algorithm stops, the point of possible /// minimum. /// ## Returns /// The value of a function at the point found. fn minimize(&mut self, x: &mut dyn core::ToInputOutputArray) -> Result<f64> { input_output_array_arg!(x); unsafe { sys::cv_MinProblemSolver_minimize__InputOutputArray(self.as_raw_MinProblemSolver(), x.as_raw__InputOutputArray()) }.into_result() } } // Generating impl for trait core::MinProblemSolver_Function /// Represents function being optimized pub trait MinProblemSolver_Function { #[inline(always)] fn as_raw_MinProblemSolver_Function(&self) -> *mut c_void; fn get_dims(&self) -> Result<i32> { unsafe { sys::cv_MinProblemSolver_Function_getDims_const(self.as_raw_MinProblemSolver_Function()) }.into_result() } fn get_gradient_eps(&self) -> Result<f64> { unsafe { sys::cv_MinProblemSolver_Function_getGradientEps_const(self.as_raw_MinProblemSolver_Function()) }.into_result() } fn calc(&self, x: &f64) -> Result<f64> { unsafe { sys::cv_MinProblemSolver_Function_calc_const_const_double_X(self.as_raw_MinProblemSolver_Function(), x) }.into_result() } fn get_gradient(&mut self, x: &f64, grad: &mut f64) -> Result<()> { unsafe { sys::cv_MinProblemSolver_Function_getGradient_const_double_X_double_X(self.as_raw_MinProblemSolver_Function(), x, grad) }.into_result() } } impl Moments { /// the default constructor pub fn default() -> Result<core::Moments> { unsafe { sys::cv_Moments_Moments() }.into_result() } /// the full constructor pub fn new(m00: f64, m10: f64, m01: f64, m20: f64, m11: f64, m02: f64, m30: f64, m21: f64, m12: f64, m03: f64) -> Result<core::Moments> { unsafe { sys::cv_Moments_Moments_double_double_double_double_double_double_double_double_double_double(m00, m10, m01, m20, m11, m02, m30, m21, m12, m03) }.into_result() } } // boxed class cv::NAryMatIterator /// n-ary multi-dimensional array iterator. /// /// Use the class to implement unary, binary, and, generally, n-ary element-wise operations on /// multi-dimensional arrays. Some of the arguments of an n-ary function may be continuous arrays, some /// may be not. It is possible to use conventional MatIterator 's for each array but incrementing all of /// the iterators after each small operations may be a big overhead. In this case consider using /// NAryMatIterator to iterate through several matrices simultaneously as long as they have the same /// geometry (dimensionality and all the dimension sizes are the same). On each iteration `it.planes[0]`, /// `it.planes[1]`,... will be the slices of the corresponding matrices. /// /// The example below illustrates how you can compute a normalized and threshold 3D color histogram: /// ```ignore /// void computeNormalizedColorHist(const Mat& image, Mat& hist, int N, double minProb) /// { /// const int histSize[] = {N, N, N}; /// /// // make sure that the histogram has a proper size and type /// hist.create(3, histSize, CV_32F); /// /// // and clear it /// hist = Scalar(0); /// /// // the loop below assumes that the image /// // is a 8-bit 3-channel. check it. /// CV_Assert(image.type() == CV_8UC3); /// MatConstIterator_<Vec3b> it = image.begin<Vec3b>(), /// it_end = image.end<Vec3b>(); /// for( ; it != it_end; ++it ) /// { /// const Vec3b& pix = *it; /// hist.at<float>(pix[0]*N/256, pix[1]*N/256, pix[2]*N/256) += 1.f; /// } /// /// minProb *= image.rows*image.cols; /// /// // initialize iterator (the style is different from STL). /// // after initialization the iterator will contain /// // the number of slices or planes the iterator will go through. /// // it simultaneously increments iterators for several matrices /// // supplied as a null terminated list of pointers /// const Mat* arrays[] = {&hist, 0}; /// Mat planes[1]; /// NAryMatIterator itNAry(arrays, planes, 1); /// double s = 0; /// // iterate through the matrix. on each iteration /// // itNAry.planes[i] (of type Mat) will be set to the current plane /// // of the i-th n-dim matrix passed to the iterator constructor. /// for(int p = 0; p < itNAry.nplanes; p++, ++itNAry) /// { /// threshold(itNAry.planes[0], itNAry.planes[0], minProb, 0, THRESH_TOZERO); /// s += sum(itNAry.planes[0])[0]; /// } /// /// s = 1./s; /// itNAry = NAryMatIterator(arrays, planes, 1); /// for(int p = 0; p < itNAry.nplanes; p++, ++itNAry) /// itNAry.planes[0] *= s; /// } /// ``` pub struct NAryMatIterator { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for NAryMatIterator { fn drop(&mut self) { unsafe { sys::cv_NAryMatIterator_delete(self.ptr) }; } } impl NAryMatIterator { #[inline(always)] pub fn as_raw_NAryMatIterator(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for NAryMatIterator {} impl NAryMatIterator { /// the default constructor pub fn default() -> Result<core::NAryMatIterator> { unsafe { sys::cv_NAryMatIterator_NAryMatIterator() }.into_result().map(|ptr| core::NAryMatIterator { ptr }) } } // boxed class cv::PCA /// Principal Component Analysis /// /// The class is used to calculate a special basis for a set of vectors. The /// basis will consist of eigenvectors of the covariance matrix calculated /// from the input set of vectors. The class %PCA can also transform /// vectors to/from the new coordinate space defined by the basis. Usually, /// in this new coordinate system, each vector from the original set (and /// any linear combination of such vectors) can be quite accurately /// approximated by taking its first few components, corresponding to the /// eigenvectors of the largest eigenvalues of the covariance matrix. /// Geometrically it means that you calculate a projection of the vector to /// a subspace formed by a few eigenvectors corresponding to the dominant /// eigenvalues of the covariance matrix. And usually such a projection is /// very close to the original vector. So, you can represent the original /// vector from a high-dimensional space with a much shorter vector /// consisting of the projected vector's coordinates in the subspace. Such a /// transformation is also known as Karhunen-Loeve Transform, or KLT. /// See http://en.wikipedia.org/wiki/Principal_component_analysis /// /// The sample below is the function that takes two matrices. The first /// function stores a set of vectors (a row per vector) that is used to /// calculate PCA. The second function stores another "test" set of vectors /// (a row per vector). First, these vectors are compressed with PCA, then /// reconstructed back, and then the reconstruction error norm is computed /// and printed for each vector. : /// /// ```ignore{.cpp} /// using namespace cv; /// /// PCA compressPCA(const Mat& pcaset, int maxComponents, /// const Mat& testset, Mat& compressed) /// { /// PCA pca(pcaset, // pass the data /// Mat(), // we do not have a pre-computed mean vector, /// // so let the PCA engine to compute it /// PCA::DATA_AS_ROW, // indicate that the vectors /// // are stored as matrix rows /// // (use PCA::DATA_AS_COL if the vectors are /// // the matrix columns) /// maxComponents // specify, how many principal components to retain /// ); /// // if there is no test data, just return the computed basis, ready-to-use /// if( !testset.data ) /// return pca; /// CV_Assert( testset.cols == pcaset.cols ); /// /// compressed.create(testset.rows, maxComponents, testset.type()); /// /// Mat reconstructed; /// for( int i = 0; i < testset.rows; i++ ) /// { /// Mat vec = testset.row(i), coeffs = compressed.row(i), reconstructed; /// // compress the vector, the result will be stored /// // in the i-th row of the output matrix /// pca.project(vec, coeffs); /// // and then reconstruct it /// pca.backProject(coeffs, reconstructed); /// // and measure the error /// printf("%d. diff = %g\n", i, norm(vec, reconstructed, NORM_L2)); /// } /// return pca; /// } /// ``` /// /// ## See also /// calcCovarMatrix, mulTransposed, SVD, dft, dct pub struct PCA { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for PCA { fn drop(&mut self) { unsafe { sys::cv_PCA_delete(self.ptr) }; } } impl PCA { #[inline(always)] pub fn as_raw_PCA(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for PCA {} impl PCA { /// default constructor /// /// The default constructor initializes an empty %PCA structure. The other /// constructors initialize the structure and call PCA::operator()(). pub fn default() -> Result<core::PCA> { unsafe { sys::cv_PCA_PCA() }.into_result().map(|ptr| core::PCA { ptr }) } /// ## Parameters /// * data: input samples stored as matrix rows or matrix columns. /// * mean: optional mean value; if the matrix is empty (@c noArray()), /// the mean is computed from the data. /// * flags: operation flags; currently the parameter is only used to /// specify the data layout (PCA::Flags) /// * maxComponents: maximum number of components that %PCA should /// retain; by default, all the components are retained. /// /// ## C++ default parameters /// * max_components: 0 pub fn new_mat_max(data: &dyn core::ToInputArray, mean: &dyn core::ToInputArray, flags: i32, max_components: i32) -> Result<core::PCA> { input_array_arg!(data); input_array_arg!(mean); unsafe { sys::cv_PCA_PCA__InputArray__InputArray_int_int(data.as_raw__InputArray(), mean.as_raw__InputArray(), flags, max_components) }.into_result().map(|ptr| core::PCA { ptr }) } /// ## Parameters /// * data: input samples stored as matrix rows or matrix columns. /// * mean: optional mean value; if the matrix is empty (noArray()), /// the mean is computed from the data. /// * flags: operation flags; currently the parameter is only used to /// specify the data layout (PCA::Flags) /// * retainedVariance: Percentage of variance that PCA should retain. /// Using this parameter will let the PCA decided how many components to /// retain but it will always keep at least 2. pub fn new_mat_variance(data: &dyn core::ToInputArray, mean: &dyn core::ToInputArray, flags: i32, retained_variance: f64) -> Result<core::PCA> { input_array_arg!(data); input_array_arg!(mean); unsafe { sys::cv_PCA_PCA__InputArray__InputArray_int_double(data.as_raw__InputArray(), mean.as_raw__InputArray(), flags, retained_variance) }.into_result().map(|ptr| core::PCA { ptr }) } /// Projects vector(s) to the principal component subspace. /// /// The methods project one or more vectors to the principal component /// subspace, where each vector projection is represented by coefficients in /// the principal component basis. The first form of the method returns the /// matrix that the second form writes to the result. So the first form can /// be used as a part of expression while the second form can be more /// efficient in a processing loop. /// ## Parameters /// * vec: input vector(s); must have the same dimensionality and the /// same layout as the input data used at %PCA phase, that is, if /// DATA_AS_ROW are specified, then `vec.cols==data.cols` /// (vector dimensionality) and `vec.rows` is the number of vectors to /// project, and the same is true for the PCA::DATA_AS_COL case. pub fn project(&self, vec: &dyn core::ToInputArray) -> Result<core::Mat> { input_array_arg!(vec); unsafe { sys::cv_PCA_project_const__InputArray(self.as_raw_PCA(), vec.as_raw__InputArray()) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * vec: input vector(s); must have the same dimensionality and the /// same layout as the input data used at PCA phase, that is, if /// DATA_AS_ROW are specified, then `vec.cols==data.cols` /// (vector dimensionality) and `vec.rows` is the number of vectors to /// project, and the same is true for the PCA::DATA_AS_COL case. /// * result: output vectors; in case of PCA::DATA_AS_COL, the /// output matrix has as many columns as the number of input vectors, this /// means that `result.cols==vec.cols` and the number of rows match the /// number of principal components (for example, `maxComponents` parameter /// passed to the constructor). pub fn project_to(&self, vec: &dyn core::ToInputArray, result: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(vec); output_array_arg!(result); unsafe { sys::cv_PCA_project_const__InputArray__OutputArray(self.as_raw_PCA(), vec.as_raw__InputArray(), result.as_raw__OutputArray()) }.into_result() } /// Reconstructs vectors from their PC projections. /// /// The methods are inverse operations to PCA::project. They take PC /// coordinates of projected vectors and reconstruct the original vectors. /// Unless all the principal components have been retained, the /// reconstructed vectors are different from the originals. But typically, /// the difference is small if the number of components is large enough (but /// still much smaller than the original vector dimensionality). As a /// result, PCA is used. /// ## Parameters /// * vec: coordinates of the vectors in the principal component /// subspace, the layout and size are the same as of PCA::project output /// vectors. pub fn back_project(&self, vec: &dyn core::ToInputArray) -> Result<core::Mat> { input_array_arg!(vec); unsafe { sys::cv_PCA_backProject_const__InputArray(self.as_raw_PCA(), vec.as_raw__InputArray()) }.into_result().map(|ptr| core::Mat { ptr }) } /// ## Parameters /// * vec: coordinates of the vectors in the principal component /// subspace, the layout and size are the same as of PCA::project output /// vectors. /// * result: reconstructed vectors; the layout and size are the same as /// of PCA::project input vectors. pub fn back_project_to(&self, vec: &dyn core::ToInputArray, result: &mut dyn core::ToOutputArray) -> Result<()> { input_array_arg!(vec); output_array_arg!(result); unsafe { sys::cv_PCA_backProject_const__InputArray__OutputArray(self.as_raw_PCA(), vec.as_raw__InputArray(), result.as_raw__OutputArray()) }.into_result() } /// write PCA objects /// /// Writes @ref eigenvalues @ref eigenvectors and @ref mean to specified FileStorage pub fn write(&self, fs: &mut core::FileStorage) -> Result<()> { unsafe { sys::cv_PCA_write_const_FileStorage(self.as_raw_PCA(), fs.as_raw_FileStorage()) }.into_result() } /// load PCA objects /// /// Loads @ref eigenvalues @ref eigenvectors and @ref mean from specified FileNode pub fn read(&mut self, _fn: &core::FileNode) -> Result<()> { unsafe { sys::cv_PCA_read_FileNode(self.as_raw_PCA(), _fn.as_raw_FileNode()) }.into_result() } } // Generating impl for trait core::ParallelLoopBody /// Base class for parallel data processors pub trait ParallelLoopBody { #[inline(always)] fn as_raw_ParallelLoopBody(&self) -> *mut c_void; } // boxed class cv::ParallelLoopBodyLambdaWrapper pub struct ParallelLoopBodyLambdaWrapper { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for ParallelLoopBodyLambdaWrapper { fn drop(&mut self) { unsafe { sys::cv_ParallelLoopBodyLambdaWrapper_delete(self.ptr) }; } } impl ParallelLoopBodyLambdaWrapper { #[inline(always)] pub fn as_raw_ParallelLoopBodyLambdaWrapper(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for ParallelLoopBodyLambdaWrapper {} impl core::ParallelLoopBody for ParallelLoopBodyLambdaWrapper { #[inline(always)] fn as_raw_ParallelLoopBody(&self) -> *mut c_void { self.ptr } } // boxed class cv::Param pub struct Param { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Param { fn drop(&mut self) { unsafe { sys::cv_Param_delete(self.ptr) }; } } impl Param { #[inline(always)] pub fn as_raw_Param(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Param {} // boxed class cv::Range /// Template class specifying a continuous subsequence (slice) of a sequence. /// /// The class is used to specify a row or a column span in a matrix ( Mat ) and for many other purposes. /// Range(a,b) is basically the same as a:b in Matlab or a..b in Python. As in Python, start is an /// inclusive left boundary of the range and end is an exclusive right boundary of the range. Such a /// half-opened interval is usually denoted as  . /// /// The static method Range::all() returns a special variable that means "the whole sequence" or "the /// whole range", just like " : " in Matlab or " ... " in Python. All the methods and functions in /// OpenCV that take Range support this special Range::all() value. But, of course, in case of your own /// custom processing, you will probably have to check and handle it explicitly: /// ```ignore /// void my_function(..., const Range& r, ....) /// { /// if(r == Range::all()) { /// // process all the data /// } /// else { /// // process [r.start, r.end) /// } /// } /// ``` pub struct Range { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Range { fn drop(&mut self) { unsafe { sys::cv_Range_delete(self.ptr) }; } } impl Range { #[inline(always)] pub fn as_raw_Range(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Range {} impl Range { pub fn start(&self) -> Result<i32> { unsafe { sys::cv_Range_start_const(self.as_raw_Range()) }.into_result() } pub fn end(&self) -> Result<i32> { unsafe { sys::cv_Range_end_const(self.as_raw_Range()) }.into_result() } pub fn default() -> Result<core::Range> { unsafe { sys::cv_Range_Range() }.into_result().map(|ptr| core::Range { ptr }) } pub fn new(_start: i32, _end: i32) -> Result<core::Range> { unsafe { sys::cv_Range_Range_int_int(_start, _end) }.into_result().map(|ptr| core::Range { ptr }) } pub fn size(&self) -> Result<i32> { unsafe { sys::cv_Range_size_const(self.as_raw_Range()) }.into_result() } pub fn empty(&self) -> Result<bool> { unsafe { sys::cv_Range_empty_const(self.as_raw_Range()) }.into_result() } pub fn all() -> Result<core::Range> { unsafe { sys::cv_Range_all() }.into_result().map(|ptr| core::Range { ptr }) } } // boxed class cv::RotatedRect /// The class represents rotated (i.e. not up-right) rectangles on a plane. /// /// Each rectangle is specified by the center point (mass center), length of each side (represented by /// #Size2f structure) and the rotation angle in degrees. /// /// The sample below demonstrates how to use RotatedRect: /// @snippet snippets/core_various.cpp RotatedRect_demo ///  /// /// ## See also /// CamShift, fitEllipse, minAreaRect, CvBox2D pub struct RotatedRect { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for RotatedRect { fn drop(&mut self) { unsafe { sys::cv_RotatedRect_delete(self.ptr) }; } } impl RotatedRect { #[inline(always)] pub fn as_raw_RotatedRect(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for RotatedRect {} impl RotatedRect { /// returns the rectangle mass center pub fn center(&self) -> Result<core::Point2f> { unsafe { sys::cv_RotatedRect_center_const(self.as_raw_RotatedRect()) }.into_result() } /// returns width and height of the rectangle pub fn size(&self) -> Result<core::Size2f> { unsafe { sys::cv_RotatedRect_size_const(self.as_raw_RotatedRect()) }.into_result() } /// returns the rotation angle. When the angle is 0, 90, 180, 270 etc., the rectangle becomes an up-right rectangle. pub fn angle(&self) -> Result<f32> { unsafe { sys::cv_RotatedRect_angle_const(self.as_raw_RotatedRect()) }.into_result() } /// default constructor pub fn default() -> Result<core::RotatedRect> { unsafe { sys::cv_RotatedRect_RotatedRect() }.into_result().map(|ptr| core::RotatedRect { ptr }) } /// full constructor /// ## Parameters /// * center: The rectangle mass center. /// * size: Width and height of the rectangle. /// * angle: The rotation angle in a clockwise direction. When the angle is 0, 90, 180, 270 etc., /// the rectangle becomes an up-right rectangle. pub fn new(center: core::Point2f, size: core::Size2f, angle: f32) -> Result<core::RotatedRect> { unsafe { sys::cv_RotatedRect_RotatedRect_Point2f_Size2f_float(center, size, angle) }.into_result().map(|ptr| core::RotatedRect { ptr }) } /// Any 3 end points of the RotatedRect. They must be given in order (either clockwise or /// anticlockwise). pub fn for_points(point1: core::Point2f, point2: core::Point2f, point3: core::Point2f) -> Result<core::RotatedRect> { unsafe { sys::cv_RotatedRect_RotatedRect_Point2f_Point2f_Point2f(point1, point2, point3) }.into_result().map(|ptr| core::RotatedRect { ptr }) } /// returns 4 vertices of the rectangle /// ## Parameters /// * pts: The points array for storing rectangle vertices. The order is bottomLeft, topLeft, topRight, bottomRight. pub fn points(&self, pts: &mut [core::Point2f]) -> Result<()> { unsafe { sys::cv_RotatedRect_points_const_Point2f_X(self.as_raw_RotatedRect(), pts.as_mut_ptr()) }.into_result() } /// returns the minimal up-right integer rectangle containing the rotated rectangle pub fn bounding_rect(&self) -> Result<core::Rect> { unsafe { sys::cv_RotatedRect_boundingRect_const(self.as_raw_RotatedRect()) }.into_result() } /// returns the minimal (exact) floating point rectangle containing the rotated rectangle, not intended for use with images pub fn bounding_rect2f(&self) -> Result<core::Rect2f> { unsafe { sys::cv_RotatedRect_boundingRect2f_const(self.as_raw_RotatedRect()) }.into_result() } } // boxed class cv::SparseMat /// The class SparseMat represents multi-dimensional sparse numerical arrays. /// /// Such a sparse array can store elements of any type that Mat can store. *Sparse* means that only /// non-zero elements are stored (though, as a result of operations on a sparse matrix, some of its /// stored elements can actually become 0. It is up to you to detect such elements and delete them /// using SparseMat::erase ). The non-zero elements are stored in a hash table that grows when it is /// filled so that the search time is O(1) in average (regardless of whether element is there or not). /// Elements can be accessed using the following methods: /// * Query operations (SparseMat::ptr and the higher-level SparseMat::ref, SparseMat::value and /// SparseMat::find), for example: /// ```ignore /// const int dims = 5; /// int size[5] = {10, 10, 10, 10, 10}; /// SparseMat sparse_mat(dims, size, CV_32F); /// for(int i = 0; i < 1000; i++) /// { /// int idx[dims]; /// for(int k = 0; k < dims; k++) /// idx[k] = rand() % size[k]; /// sparse_mat.ref<float>(idx) += 1.f; /// } /// cout << "nnz = " << sparse_mat.nzcount() << endl; /// ``` /// /// * Sparse matrix iterators. They are similar to MatIterator but different from NAryMatIterator. /// That is, the iteration loop is familiar to STL users: /// ```ignore /// // prints elements of a sparse floating-point matrix /// // and the sum of elements. /// SparseMatConstIterator_<float> /// it = sparse_mat.begin<float>(), /// it_end = sparse_mat.end<float>(); /// double s = 0; /// int dims = sparse_mat.dims(); /// for(; it != it_end; ++it) /// { /// // print element indices and the element value /// const SparseMat::Node* n = it.node(); /// printf("("); /// for(int i = 0; i < dims; i++) /// printf("%d%s", n->idx[i], i < dims-1 ? ", " : ")"); /// printf(": %g\n", it.value<float>()); /// s += *it; /// } /// printf("Element sum is %g\n", s); /// ``` /// /// If you run this loop, you will notice that elements are not enumerated in a logical order /// (lexicographical, and so on). They come in the same order as they are stored in the hash table /// (semi-randomly). You may collect pointers to the nodes and sort them to get the proper ordering. /// Note, however, that pointers to the nodes may become invalid when you add more elements to the /// matrix. This may happen due to possible buffer reallocation. /// * Combination of the above 2 methods when you need to process 2 or more sparse matrices /// simultaneously. For example, this is how you can compute unnormalized cross-correlation of the 2 /// floating-point sparse matrices: /// ```ignore /// double cross_corr(const SparseMat& a, const SparseMat& b) /// { /// const SparseMat *_a = &a, *_b = &b; /// // if b contains less elements than a, /// // it is faster to iterate through b /// if(_a->nzcount() > _b->nzcount()) /// std::swap(_a, _b); /// SparseMatConstIterator_<float> it = _a->begin<float>(), /// it_end = _a->end<float>(); /// double ccorr = 0; /// for(; it != it_end; ++it) /// { /// // take the next element from the first matrix /// float avalue = *it; /// const Node* anode = it.node(); /// // and try to find an element with the same index in the second matrix. /// // since the hash value depends only on the element index, /// // reuse the hash value stored in the node /// float bvalue = _b->value<float>(anode->idx,&anode->hashval); /// ccorr += avalue*bvalue; /// } /// return ccorr; /// } /// ``` pub struct SparseMat { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for SparseMat { fn drop(&mut self) { unsafe { sys::cv_SparseMat_delete(self.ptr) }; } } impl SparseMat { #[inline(always)] pub fn as_raw_SparseMat(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for SparseMat {} impl SparseMat { /// Various SparseMat constructors. pub fn default() -> Result<core::SparseMat> { unsafe { sys::cv_SparseMat_SparseMat() }.into_result().map(|ptr| core::SparseMat { ptr }) } /// ## Parameters /// * dims: Array dimensionality. /// * _sizes: Sparce matrix size on all dementions. /// * _type: Sparse matrix data type. pub fn new(dims: i32, _sizes: &i32, _type: i32) -> Result<core::SparseMat> { unsafe { sys::cv_SparseMat_SparseMat_int_const_int_X_int(dims, _sizes, _type) }.into_result().map(|ptr| core::SparseMat { ptr }) } /// ## Parameters /// * m: Source matrix for copy constructor. If m is dense matrix (ocvMat) then it will be converted /// to sparse representation. pub fn copy(m: &core::SparseMat) -> Result<core::SparseMat> { unsafe { sys::cv_SparseMat_SparseMat_SparseMat(m.as_raw_SparseMat()) }.into_result().map(|ptr| core::SparseMat { ptr }) } /// ## Parameters /// * m: Source matrix for copy constructor. If m is dense matrix (ocvMat) then it will be converted /// to sparse representation. pub fn new_1(m: &core::Mat) -> Result<core::SparseMat> { unsafe { sys::cv_SparseMat_SparseMat_Mat(m.as_raw_Mat()) }.into_result().map(|ptr| core::SparseMat { ptr }) } /// creates full copy of the matrix pub fn clone(&self) -> Result<core::SparseMat> { unsafe { sys::cv_SparseMat_clone_const(self.as_raw_SparseMat()) }.into_result().map(|ptr| core::SparseMat { ptr }) } /// copies all the data to the destination matrix. All the previous content of m is erased pub fn copy_to(&self, m: &mut core::SparseMat) -> Result<()> { unsafe { sys::cv_SparseMat_copyTo_const_SparseMat(self.as_raw_SparseMat(), m.as_raw_SparseMat()) }.into_result() } /// converts sparse matrix to dense matrix. pub fn copy_to_1(&self, m: &mut core::Mat) -> Result<()> { unsafe { sys::cv_SparseMat_copyTo_const_Mat(self.as_raw_SparseMat(), m.as_raw_Mat()) }.into_result() } /// multiplies all the matrix elements by the specified scale factor alpha and converts the results to the specified data type /// /// ## C++ default parameters /// * alpha: 1 pub fn convert_to(&self, m: &mut core::SparseMat, rtype: i32, alpha: f64) -> Result<()> { unsafe { sys::cv_SparseMat_convertTo_const_SparseMat_int_double(self.as_raw_SparseMat(), m.as_raw_SparseMat(), rtype, alpha) }.into_result() } /// converts sparse matrix to dense n-dim matrix with optional type conversion and scaling. /// /// ## C++ default parameters /// * alpha: 1 /// * beta: 0 pub fn convert_to_1(&self, m: &mut core::Mat, rtype: i32, alpha: f64, beta: f64) -> Result<()> { unsafe { sys::cv_SparseMat_convertTo_const_Mat_int_double_double(self.as_raw_SparseMat(), m.as_raw_Mat(), rtype, alpha, beta) }.into_result() } /// /// ## C++ default parameters /// * _type: -1 pub fn assign_to(&self, m: &mut core::SparseMat, _type: i32) -> Result<()> { unsafe { sys::cv_SparseMat_assignTo_const_SparseMat_int(self.as_raw_SparseMat(), m.as_raw_SparseMat(), _type) }.into_result() } /// reallocates sparse matrix. pub fn create(&mut self, dims: i32, _sizes: &i32, _type: i32) -> Result<()> { unsafe { sys::cv_SparseMat_create_int_const_int_X_int(self.as_raw_SparseMat(), dims, _sizes, _type) }.into_result() } /// sets all the sparse matrix elements to 0, which means clearing the hash table. pub fn clear(&mut self) -> Result<()> { unsafe { sys::cv_SparseMat_clear(self.as_raw_SparseMat()) }.into_result() } /// manually increments the reference counter to the header. pub fn addref(&mut self) -> Result<()> { unsafe { sys::cv_SparseMat_addref(self.as_raw_SparseMat()) }.into_result() } pub fn release(&mut self) -> Result<()> { unsafe { sys::cv_SparseMat_release(self.as_raw_SparseMat()) }.into_result() } /// converts sparse matrix to the old-style representation; all the elements are copied. /// returns the size of each element in bytes (not including the overhead - the space occupied by SparseMat::Node elements) pub fn elem_size(&self) -> Result<size_t> { unsafe { sys::cv_SparseMat_elemSize_const(self.as_raw_SparseMat()) }.into_result() } /// returns elemSize()/channels() pub fn elem_size1(&self) -> Result<size_t> { unsafe { sys::cv_SparseMat_elemSize1_const(self.as_raw_SparseMat()) }.into_result() } /// returns type of sparse matrix elements pub fn _type(&self) -> Result<i32> { unsafe { sys::cv_SparseMat_type_const(self.as_raw_SparseMat()) }.into_result() } /// returns the depth of sparse matrix elements pub fn depth(&self) -> Result<i32> { unsafe { sys::cv_SparseMat_depth_const(self.as_raw_SparseMat()) }.into_result() } /// returns the number of channels pub fn channels(&self) -> Result<i32> { unsafe { sys::cv_SparseMat_channels_const(self.as_raw_SparseMat()) }.into_result() } /// returns the array of sizes, or NULL if the matrix is not allocated pub fn size(&self) -> Result<&i32> { unsafe { sys::cv_SparseMat_size_const(self.as_raw_SparseMat()) }.into_result().and_then(|x| unsafe { x.as_ref() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } /// returns the size of i-th matrix dimension (or 0) pub fn size_1(&self, i: i32) -> Result<i32> { unsafe { sys::cv_SparseMat_size_const_int(self.as_raw_SparseMat(), i) }.into_result() } /// returns the matrix dimensionality pub fn dims(&self) -> Result<i32> { unsafe { sys::cv_SparseMat_dims_const(self.as_raw_SparseMat()) }.into_result() } /// returns the number of non-zero elements (=the number of hash table nodes) pub fn nzcount(&self) -> Result<size_t> { unsafe { sys::cv_SparseMat_nzcount_const(self.as_raw_SparseMat()) }.into_result() } /// computes the element hash value (1D case) pub fn hash(&self, i0: i32) -> Result<size_t> { unsafe { sys::cv_SparseMat_hash_const_int(self.as_raw_SparseMat(), i0) }.into_result() } /// computes the element hash value (2D case) pub fn hash_1(&self, i0: i32, i1: i32) -> Result<size_t> { unsafe { sys::cv_SparseMat_hash_const_int_int(self.as_raw_SparseMat(), i0, i1) }.into_result() } /// computes the element hash value (3D case) pub fn hash_2(&self, i0: i32, i1: i32, i2: i32) -> Result<size_t> { unsafe { sys::cv_SparseMat_hash_const_int_int_int(self.as_raw_SparseMat(), i0, i1, i2) }.into_result() } /// computes the element hash value (nD case) pub fn hash_3(&self, idx: &i32) -> Result<size_t> { unsafe { sys::cv_SparseMat_hash_const_const_int_X(self.as_raw_SparseMat(), idx) }.into_result() } /// returns pointer to the specified element (1D case) /// /// ## C++ default parameters /// * hashval: 0 pub fn ptr(&mut self, i0: i32, create_missing: bool, hashval: &mut size_t) -> Result<&mut u8> { unsafe { sys::cv_SparseMat_ptr_int_bool_size_t_X(self.as_raw_SparseMat(), i0, create_missing, hashval) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } /// returns pointer to the specified element (2D case) /// /// ## C++ default parameters /// * hashval: 0 pub fn ptr_1(&mut self, i0: i32, i1: i32, create_missing: bool, hashval: &mut size_t) -> Result<&mut u8> { unsafe { sys::cv_SparseMat_ptr_int_int_bool_size_t_X(self.as_raw_SparseMat(), i0, i1, create_missing, hashval) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } /// returns pointer to the specified element (3D case) /// /// ## C++ default parameters /// * hashval: 0 pub fn ptr_2(&mut self, i0: i32, i1: i32, i2: i32, create_missing: bool, hashval: &mut size_t) -> Result<&mut u8> { unsafe { sys::cv_SparseMat_ptr_int_int_int_bool_size_t_X(self.as_raw_SparseMat(), i0, i1, i2, create_missing, hashval) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } /// returns pointer to the specified element (nD case) /// /// ## C++ default parameters /// * hashval: 0 pub fn ptr_3(&mut self, idx: &i32, create_missing: bool, hashval: &mut size_t) -> Result<&mut u8> { unsafe { sys::cv_SparseMat_ptr_const_int_X_bool_size_t_X(self.as_raw_SparseMat(), idx, create_missing, hashval) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } /// erases the specified element (2D case) /// /// ## C++ default parameters /// * hashval: 0 pub fn erase(&mut self, i0: i32, i1: i32, hashval: &mut size_t) -> Result<()> { unsafe { sys::cv_SparseMat_erase_int_int_size_t_X(self.as_raw_SparseMat(), i0, i1, hashval) }.into_result() } /// erases the specified element (3D case) /// /// ## C++ default parameters /// * hashval: 0 pub fn erase_1(&mut self, i0: i32, i1: i32, i2: i32, hashval: &mut size_t) -> Result<()> { unsafe { sys::cv_SparseMat_erase_int_int_int_size_t_X(self.as_raw_SparseMat(), i0, i1, i2, hashval) }.into_result() } /// erases the specified element (nD case) /// /// ## C++ default parameters /// * hashval: 0 pub fn erase_2(&mut self, idx: &i32, hashval: &mut size_t) -> Result<()> { unsafe { sys::cv_SparseMat_erase_const_int_X_size_t_X(self.as_raw_SparseMat(), idx, hashval) }.into_result() } pub fn node(&mut self, nidx: size_t) -> Result<core::SparseMat_Node> { unsafe { sys::cv_SparseMat_node_size_t(self.as_raw_SparseMat(), nidx) }.into_result().map(|ptr| core::SparseMat_Node { ptr }) } pub fn node_1(&self, nidx: size_t) -> Result<core::SparseMat_Node> { unsafe { sys::cv_SparseMat_node_const_size_t(self.as_raw_SparseMat(), nidx) }.into_result().map(|ptr| core::SparseMat_Node { ptr }) } pub fn new_node(&mut self, idx: &i32, hashval: size_t) -> Result<&mut u8> { unsafe { sys::cv_SparseMat_newNode_const_int_X_size_t(self.as_raw_SparseMat(), idx, hashval) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } pub fn remove_node(&mut self, hidx: size_t, nidx: size_t, previdx: size_t) -> Result<()> { unsafe { sys::cv_SparseMat_removeNode_size_t_size_t_size_t(self.as_raw_SparseMat(), hidx, nidx, previdx) }.into_result() } pub fn resize_hash_tab(&mut self, newsize: size_t) -> Result<()> { unsafe { sys::cv_SparseMat_resizeHashTab_size_t(self.as_raw_SparseMat(), newsize) }.into_result() } } // boxed class cv::SparseMat::Hdr /// the sparse matrix header pub struct SparseMat_Hdr { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for SparseMat_Hdr { fn drop(&mut self) { unsafe { sys::cv_SparseMat_Hdr_delete(self.ptr) }; } } impl SparseMat_Hdr { #[inline(always)] pub fn as_raw_SparseMat_Hdr(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for SparseMat_Hdr {} impl SparseMat_Hdr { pub fn new(_dims: i32, _sizes: &i32, _type: i32) -> Result<core::SparseMat_Hdr> { unsafe { sys::cv_SparseMat_Hdr_Hdr_int_const_int_X_int(_dims, _sizes, _type) }.into_result().map(|ptr| core::SparseMat_Hdr { ptr }) } pub fn clear(&mut self) -> Result<()> { unsafe { sys::cv_SparseMat_Hdr_clear(self.as_raw_SparseMat_Hdr()) }.into_result() } } // boxed class cv::SparseMat::Node /// sparse matrix node - element of a hash table pub struct SparseMat_Node { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for SparseMat_Node { fn drop(&mut self) { unsafe { sys::cv_SparseMat_Node_delete(self.ptr) }; } } impl SparseMat_Node { #[inline(always)] pub fn as_raw_SparseMat_Node(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for SparseMat_Node {} // Generating impl for trait core::SparseMatConstIterator /// Read-Only Sparse Matrix Iterator. /// /// Here is how to use the iterator to compute the sum of floating-point sparse matrix elements: /// /// \code /// SparseMatConstIterator it = m.begin(), it_end = m.end(); /// double s = 0; /// CV_Assert( m.type() == CV_32F ); /// for( ; it != it_end; ++it ) /// s += it.value<float>(); /// \endcode pub trait SparseMatConstIteratorTrait { #[inline(always)] fn as_raw_SparseMatConstIterator(&self) -> *mut c_void; /// returns the current node of the sparse matrix. it.node->idx is the current element index fn node(&self) -> Result<core::SparseMat_Node> { unsafe { sys::cv_SparseMatConstIterator_node_const(self.as_raw_SparseMatConstIterator()) }.into_result().map(|ptr| core::SparseMat_Node { ptr }) } /// moves iterator to the element after the last element fn seek_end(&mut self) -> Result<()> { unsafe { sys::cv_SparseMatConstIterator_seekEnd(self.as_raw_SparseMatConstIterator()) }.into_result() } } // boxed class cv::SparseMatConstIterator /// Read-Only Sparse Matrix Iterator. /// /// Here is how to use the iterator to compute the sum of floating-point sparse matrix elements: /// /// \code /// SparseMatConstIterator it = m.begin(), it_end = m.end(); /// double s = 0; /// CV_Assert( m.type() == CV_32F ); /// for( ; it != it_end; ++it ) /// s += it.value<float>(); /// \endcode pub struct SparseMatConstIterator { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for SparseMatConstIterator { fn drop(&mut self) { unsafe { sys::cv_SparseMatConstIterator_delete(self.ptr) }; } } impl SparseMatConstIterator { #[inline(always)] pub fn as_raw_SparseMatConstIterator(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for SparseMatConstIterator {} impl core::SparseMatConstIteratorTrait for SparseMatConstIterator { #[inline(always)] fn as_raw_SparseMatConstIterator(&self) -> *mut c_void { self.ptr } } // boxed class cv::SparseMatIterator /// Read-write Sparse Matrix Iterator /// /// The class is similar to cv::SparseMatConstIterator, /// but can be used for in-place modification of the matrix elements. pub struct SparseMatIterator { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for SparseMatIterator { fn drop(&mut self) { unsafe { sys::cv_SparseMatIterator_delete(self.ptr) }; } } impl SparseMatIterator { #[inline(always)] pub fn as_raw_SparseMatIterator(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for SparseMatIterator {} impl core::SparseMatConstIteratorTrait for SparseMatIterator { #[inline(always)] fn as_raw_SparseMatConstIterator(&self) -> *mut c_void { self.ptr } } impl SparseMatIterator { /// returns pointer to the current sparse matrix node. it.node->idx is the index of the current element (do not modify it!) pub fn node(&self) -> Result<core::SparseMat_Node> { unsafe { sys::cv_SparseMatIterator_node_const(self.as_raw_SparseMatIterator()) }.into_result().map(|ptr| core::SparseMat_Node { ptr }) } } // boxed class cv::TermCriteria /// The class defining termination criteria for iterative algorithms. /// /// You can initialize it by default constructor and then override any parameters, or the structure may /// be fully initialized using the advanced variant of the constructor. pub struct TermCriteria { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for TermCriteria { fn drop(&mut self) { unsafe { sys::cv_TermCriteria_delete(self.ptr) }; } } impl TermCriteria { #[inline(always)] pub fn as_raw_TermCriteria(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for TermCriteria {} impl TermCriteria { /// the type of termination criteria: COUNT, EPS or COUNT + EPS pub fn _type(&self) -> Result<i32> { unsafe { sys::cv_TermCriteria_type_const(self.as_raw_TermCriteria()) }.into_result() } /// the maximum number of iterations/elements pub fn max_count(&self) -> Result<i32> { unsafe { sys::cv_TermCriteria_maxCount_const(self.as_raw_TermCriteria()) }.into_result() } /// the desired accuracy pub fn epsilon(&self) -> Result<f64> { unsafe { sys::cv_TermCriteria_epsilon_const(self.as_raw_TermCriteria()) }.into_result() } /// default constructor pub fn default() -> Result<core::TermCriteria> { unsafe { sys::cv_TermCriteria_TermCriteria() }.into_result().map(|ptr| core::TermCriteria { ptr }) } /// ## Parameters /// * type: The type of termination criteria, one of TermCriteria::Type /// * maxCount: The maximum number of iterations or elements to compute. /// * epsilon: The desired accuracy or change in parameters at which the iterative algorithm stops. pub fn new(_type: i32, max_count: i32, epsilon: f64) -> Result<core::TermCriteria> { unsafe { sys::cv_TermCriteria_TermCriteria_int_int_double(_type, max_count, epsilon) }.into_result().map(|ptr| core::TermCriteria { ptr }) } pub fn is_valid(&self) -> Result<bool> { unsafe { sys::cv_TermCriteria_isValid_const(self.as_raw_TermCriteria()) }.into_result() } } // boxed class cv::TickMeter /// a Class to measure passing time. /// /// The class computes passing time by counting the number of ticks per second. That is, the following code computes the /// execution time in seconds: /// ```ignore /// TickMeter tm; /// tm.start(); /// // do something ... /// tm.stop(); /// std::cout << tm.getTimeSec(); /// ``` /// /// /// It is also possible to compute the average time over multiple runs: /// ```ignore /// TickMeter tm; /// for (int i = 0; i < 100; i++) /// { /// tm.start(); /// // do something ... /// tm.stop(); /// } /// double average_time = tm.getTimeSec() / tm.getCounter(); /// std::cout << "Average time in second per iteration is: " << average_time << std::endl; /// ``` /// /// ## See also /// getTickCount, getTickFrequency pub struct TickMeter { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for TickMeter { fn drop(&mut self) { unsafe { sys::cv_TickMeter_delete(self.ptr) }; } } impl TickMeter { #[inline(always)] pub fn as_raw_TickMeter(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for TickMeter {} impl TickMeter { /// the default constructor pub fn default() -> Result<core::TickMeter> { unsafe { sys::cv_TickMeter_TickMeter() }.into_result().map(|ptr| core::TickMeter { ptr }) } /// starts counting ticks. pub fn start(&mut self) -> Result<()> { unsafe { sys::cv_TickMeter_start(self.as_raw_TickMeter()) }.into_result() } /// stops counting ticks. pub fn stop(&mut self) -> Result<()> { unsafe { sys::cv_TickMeter_stop(self.as_raw_TickMeter()) }.into_result() } /// returns counted ticks. pub fn get_time_ticks(&self) -> Result<i64> { unsafe { sys::cv_TickMeter_getTimeTicks_const(self.as_raw_TickMeter()) }.into_result() } /// returns passed time in microseconds. pub fn get_time_micro(&self) -> Result<f64> { unsafe { sys::cv_TickMeter_getTimeMicro_const(self.as_raw_TickMeter()) }.into_result() } /// returns passed time in milliseconds. pub fn get_time_milli(&self) -> Result<f64> { unsafe { sys::cv_TickMeter_getTimeMilli_const(self.as_raw_TickMeter()) }.into_result() } /// returns passed time in seconds. pub fn get_time_sec(&self) -> Result<f64> { unsafe { sys::cv_TickMeter_getTimeSec_const(self.as_raw_TickMeter()) }.into_result() } /// returns internal counter value. pub fn get_counter(&self) -> Result<i64> { unsafe { sys::cv_TickMeter_getCounter_const(self.as_raw_TickMeter()) }.into_result() } /// resets internal values. pub fn reset(&mut self) -> Result<()> { unsafe { sys::cv_TickMeter_reset(self.as_raw_TickMeter()) }.into_result() } } // boxed class cv::UMat /// @todo document pub struct UMat { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for UMat { fn drop(&mut self) { unsafe { sys::cv_UMat_delete(self.ptr) }; } } impl UMat { #[inline(always)] pub fn as_raw_UMat(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for UMat {} impl UMat { pub fn flags(&self) -> Result<i32> { unsafe { sys::cv_UMat_flags_const(self.as_raw_UMat()) }.into_result() } /// the matrix dimensionality, >= 2 pub fn dims(&self) -> Result<i32> { unsafe { sys::cv_UMat_dims_const(self.as_raw_UMat()) }.into_result() } /// the number of rows and columns or (-1, -1) when the matrix has more than 2 dimensions pub fn rows(&self) -> Result<i32> { unsafe { sys::cv_UMat_rows_const(self.as_raw_UMat()) }.into_result() } /// the number of rows and columns or (-1, -1) when the matrix has more than 2 dimensions pub fn cols(&self) -> Result<i32> { unsafe { sys::cv_UMat_cols_const(self.as_raw_UMat()) }.into_result() } pub fn usage_flags(&self) -> Result<core::UMatUsageFlags> { unsafe { sys::cv_UMat_usageFlags_const(self.as_raw_UMat()) }.into_result() } pub fn offset(&self) -> Result<size_t> { unsafe { sys::cv_UMat_offset_const(self.as_raw_UMat()) }.into_result() } pub fn mat_size(&self) -> Result<core::MatSize> { unsafe { sys::cv_UMat_size_const(self.as_raw_UMat()) }.into_result().map(|ptr| core::MatSize { ptr }) } pub fn mat_step(&self) -> Result<core::MatStep> { unsafe { sys::cv_UMat_step_const(self.as_raw_UMat()) }.into_result().map(|ptr| core::MatStep { ptr }) } /// default constructor /// /// ## C++ default parameters /// * usage_flags: USAGE_DEFAULT pub fn new(usage_flags: core::UMatUsageFlags) -> Result<core::UMat> { unsafe { sys::cv_UMat_UMat_UMatUsageFlags(usage_flags) }.into_result().map(|ptr| core::UMat { ptr }) } /// constructs 2D matrix of the specified size and type /// /// ## C++ default parameters /// * usage_flags: USAGE_DEFAULT pub unsafe fn new_rows_cols(rows: i32, cols: i32, _type: i32, usage_flags: core::UMatUsageFlags) -> Result<core::UMat> { { sys::cv_UMat_UMat_int_int_int_UMatUsageFlags(rows, cols, _type, usage_flags) }.into_result().map(|ptr| core::UMat { ptr }) } /// /// ## C++ default parameters /// * usage_flags: USAGE_DEFAULT pub unsafe fn new_size(size: core::Size, _type: i32, usage_flags: core::UMatUsageFlags) -> Result<core::UMat> { { sys::cv_UMat_UMat_Size_int_UMatUsageFlags(size, _type, usage_flags) }.into_result().map(|ptr| core::UMat { ptr }) } /// constructs 2D matrix and fills it with the specified value _s. /// /// ## C++ default parameters /// * usage_flags: USAGE_DEFAULT pub fn new_rows_cols_with_default(rows: i32, cols: i32, _type: i32, s: core::Scalar, usage_flags: core::UMatUsageFlags) -> Result<core::UMat> { unsafe { sys::cv_UMat_UMat_int_int_int_Scalar_UMatUsageFlags(rows, cols, _type, s, usage_flags) }.into_result().map(|ptr| core::UMat { ptr }) } /// /// ## C++ default parameters /// * usage_flags: USAGE_DEFAULT pub fn new_size_with_default(size: core::Size, _type: i32, s: core::Scalar, usage_flags: core::UMatUsageFlags) -> Result<core::UMat> { unsafe { sys::cv_UMat_UMat_Size_int_Scalar_UMatUsageFlags(size, _type, s, usage_flags) }.into_result().map(|ptr| core::UMat { ptr }) } /// constructs n-dimensional matrix /// /// ## C++ default parameters /// * usage_flags: USAGE_DEFAULT pub unsafe fn new_nd(ndims: i32, sizes: &[i32], _type: i32, usage_flags: core::UMatUsageFlags) -> Result<core::UMat> { { sys::cv_UMat_UMat_int_const_int_X_int_UMatUsageFlags(ndims, sizes.as_ptr(), _type, usage_flags) }.into_result().map(|ptr| core::UMat { ptr }) } /// /// ## C++ default parameters /// * usage_flags: USAGE_DEFAULT pub fn new_nd_with_default(ndims: i32, sizes: &[i32], _type: i32, s: core::Scalar, usage_flags: core::UMatUsageFlags) -> Result<core::UMat> { unsafe { sys::cv_UMat_UMat_int_const_int_X_int_Scalar_UMatUsageFlags(ndims, sizes.as_ptr(), _type, s, usage_flags) }.into_result().map(|ptr| core::UMat { ptr }) } /// copy constructor pub fn copy(m: &core::UMat) -> Result<core::UMat> { unsafe { sys::cv_UMat_UMat_UMat(m.as_raw_UMat()) }.into_result().map(|ptr| core::UMat { ptr }) } /// creates a matrix header for a part of the bigger matrix /// /// ## C++ default parameters /// * col_range: Range::all() pub fn rowscols(m: &core::UMat, row_range: &core::Range, col_range: &core::Range) -> Result<core::UMat> { unsafe { sys::cv_UMat_UMat_UMat_Range_Range(m.as_raw_UMat(), row_range.as_raw_Range(), col_range.as_raw_Range()) }.into_result().map(|ptr| core::UMat { ptr }) } pub fn roi(m: &core::UMat, roi: core::Rect) -> Result<core::UMat> { unsafe { sys::cv_UMat_UMat_UMat_Rect(m.as_raw_UMat(), roi) }.into_result().map(|ptr| core::UMat { ptr }) } pub fn ranges(m: &core::UMat, ranges: &types::VectorOfRange) -> Result<core::UMat> { unsafe { sys::cv_UMat_UMat_UMat_VectorOfRange(m.as_raw_UMat(), ranges.as_raw_VectorOfRange()) }.into_result().map(|ptr| core::UMat { ptr }) } pub fn get_mat(&self, flags: i32) -> Result<core::Mat> { unsafe { sys::cv_UMat_getMat_const_int(self.as_raw_UMat(), flags) }.into_result().map(|ptr| core::Mat { ptr }) } /// returns a new matrix header for the specified row pub fn row(&self, y: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_row_const_int(self.as_raw_UMat(), y) }.into_result().map(|ptr| core::UMat { ptr }) } /// returns a new matrix header for the specified column pub fn col(&self, x: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_col_const_int(self.as_raw_UMat(), x) }.into_result().map(|ptr| core::UMat { ptr }) } /// ... for the specified row span pub fn row_bounds(&self, startrow: i32, endrow: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_rowRange_const_int_int(self.as_raw_UMat(), startrow, endrow) }.into_result().map(|ptr| core::UMat { ptr }) } pub fn row_range(&self, r: &core::Range) -> Result<core::UMat> { unsafe { sys::cv_UMat_rowRange_const_Range(self.as_raw_UMat(), r.as_raw_Range()) }.into_result().map(|ptr| core::UMat { ptr }) } /// ... for the specified column span pub fn col_bounds(&self, startcol: i32, endcol: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_colRange_const_int_int(self.as_raw_UMat(), startcol, endcol) }.into_result().map(|ptr| core::UMat { ptr }) } pub fn col_range(&self, r: &core::Range) -> Result<core::UMat> { unsafe { sys::cv_UMat_colRange_const_Range(self.as_raw_UMat(), r.as_raw_Range()) }.into_result().map(|ptr| core::UMat { ptr }) } /// ... for the specified diagonal /// (d=0 - the main diagonal, /// >0 - a diagonal from the upper half, /// <0 - a diagonal from the lower half) /// /// ## C++ default parameters /// * d: 0 pub fn diag(&self, d: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_diag_const_int(self.as_raw_UMat(), d) }.into_result().map(|ptr| core::UMat { ptr }) } /// constructs a square diagonal matrix which main diagonal is vector "d" pub fn diag_1(d: &core::UMat) -> Result<core::UMat> { unsafe { sys::cv_UMat_diag_UMat(d.as_raw_UMat()) }.into_result().map(|ptr| core::UMat { ptr }) } /// returns deep copy of the matrix, i.e. the data is copied pub fn clone(&self) -> Result<core::UMat> { unsafe { sys::cv_UMat_clone_const(self.as_raw_UMat()) }.into_result().map(|ptr| core::UMat { ptr }) } /// copies the matrix content to "m". pub fn copy_to(&self, m: &mut dyn core::ToOutputArray) -> Result<()> { output_array_arg!(m); unsafe { sys::cv_UMat_copyTo_const__OutputArray(self.as_raw_UMat(), m.as_raw__OutputArray()) }.into_result() } /// copies those matrix elements to "m" that are marked with non-zero mask elements. pub fn copy_to_masked(&self, m: &mut dyn core::ToOutputArray, mask: &dyn core::ToInputArray) -> Result<()> { output_array_arg!(m); input_array_arg!(mask); unsafe { sys::cv_UMat_copyTo_const__OutputArray__InputArray(self.as_raw_UMat(), m.as_raw__OutputArray(), mask.as_raw__InputArray()) }.into_result() } /// converts matrix to another datatype with optional scaling. See cvConvertScale. /// /// ## C++ default parameters /// * alpha: 1 /// * beta: 0 pub fn convert_to(&self, m: &mut dyn core::ToOutputArray, rtype: i32, alpha: f64, beta: f64) -> Result<()> { output_array_arg!(m); unsafe { sys::cv_UMat_convertTo_const__OutputArray_int_double_double(self.as_raw_UMat(), m.as_raw__OutputArray(), rtype, alpha, beta) }.into_result() } /// /// ## C++ default parameters /// * _type: -1 pub fn assign_to(&self, m: &mut core::UMat, _type: i32) -> Result<()> { unsafe { sys::cv_UMat_assignTo_const_UMat_int(self.as_raw_UMat(), m.as_raw_UMat(), _type) }.into_result() } /// sets some of the matrix elements to s, according to the mask /// /// ## C++ default parameters /// * mask: noArray() pub fn set_to(&mut self, value: &dyn core::ToInputArray, mask: &dyn core::ToInputArray) -> Result<core::UMat> { input_array_arg!(value); input_array_arg!(mask); unsafe { sys::cv_UMat_setTo__InputArray__InputArray(self.as_raw_UMat(), value.as_raw__InputArray(), mask.as_raw__InputArray()) }.into_result().map(|ptr| core::UMat { ptr }) } /// creates alternative matrix header for the same data, with different /// /// ## C++ default parameters /// * rows: 0 pub fn reshape(&self, cn: i32, rows: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_reshape_const_int_int(self.as_raw_UMat(), cn, rows) }.into_result().map(|ptr| core::UMat { ptr }) } pub fn reshape_1(&self, cn: i32, newndims: i32, newsz: &i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_reshape_const_int_int_const_int_X(self.as_raw_UMat(), cn, newndims, newsz) }.into_result().map(|ptr| core::UMat { ptr }) } /// matrix transposition by means of matrix expressions pub fn t(&self) -> Result<core::UMat> { unsafe { sys::cv_UMat_t_const(self.as_raw_UMat()) }.into_result().map(|ptr| core::UMat { ptr }) } /// matrix inversion by means of matrix expressions /// /// ## C++ default parameters /// * method: DECOMP_LU pub fn inv(&self, method: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_inv_const_int(self.as_raw_UMat(), method) }.into_result().map(|ptr| core::UMat { ptr }) } /// per-element matrix multiplication by means of matrix expressions /// /// ## C++ default parameters /// * scale: 1 pub fn mul(&self, m: &dyn core::ToInputArray, scale: f64) -> Result<core::UMat> { input_array_arg!(m); unsafe { sys::cv_UMat_mul_const__InputArray_double(self.as_raw_UMat(), m.as_raw__InputArray(), scale) }.into_result().map(|ptr| core::UMat { ptr }) } /// computes dot-product pub fn dot(&self, m: &dyn core::ToInputArray) -> Result<f64> { input_array_arg!(m); unsafe { sys::cv_UMat_dot_const__InputArray(self.as_raw_UMat(), m.as_raw__InputArray()) }.into_result() } /// Matlab-style matrix initialization pub fn zeros(rows: i32, cols: i32, _type: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_zeros_int_int_int(rows, cols, _type) }.into_result().map(|ptr| core::UMat { ptr }) } pub fn zeros_1(size: core::Size, _type: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_zeros_Size_int(size, _type) }.into_result().map(|ptr| core::UMat { ptr }) } pub fn zeros_2(ndims: i32, sz: &i32, _type: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_zeros_int_const_int_X_int(ndims, sz, _type) }.into_result().map(|ptr| core::UMat { ptr }) } pub fn ones(rows: i32, cols: i32, _type: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_ones_int_int_int(rows, cols, _type) }.into_result().map(|ptr| core::UMat { ptr }) } pub fn ones_1(size: core::Size, _type: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_ones_Size_int(size, _type) }.into_result().map(|ptr| core::UMat { ptr }) } pub fn ones_2(ndims: i32, sz: &i32, _type: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_ones_int_const_int_X_int(ndims, sz, _type) }.into_result().map(|ptr| core::UMat { ptr }) } pub fn eye(rows: i32, cols: i32, _type: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_eye_int_int_int(rows, cols, _type) }.into_result().map(|ptr| core::UMat { ptr }) } pub fn eye_1(size: core::Size, _type: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_eye_Size_int(size, _type) }.into_result().map(|ptr| core::UMat { ptr }) } /// allocates new matrix data unless the matrix already has specified size and type. /// /// ## C++ default parameters /// * usage_flags: USAGE_DEFAULT pub unsafe fn create_rows_cols(&mut self, rows: i32, cols: i32, _type: i32, usage_flags: core::UMatUsageFlags) -> Result<()> { { sys::cv_UMat_create_int_int_int_UMatUsageFlags(self.as_raw_UMat(), rows, cols, _type, usage_flags) }.into_result() } /// /// ## C++ default parameters /// * usage_flags: USAGE_DEFAULT pub unsafe fn create_size(&mut self, size: core::Size, _type: i32, usage_flags: core::UMatUsageFlags) -> Result<()> { { sys::cv_UMat_create_Size_int_UMatUsageFlags(self.as_raw_UMat(), size, _type, usage_flags) }.into_result() } /// /// ## C++ default parameters /// * usage_flags: USAGE_DEFAULT pub unsafe fn create_nd(&mut self, sizes: &types::VectorOfint, _type: i32, usage_flags: core::UMatUsageFlags) -> Result<()> { { sys::cv_UMat_create_VectorOfint_int_UMatUsageFlags(self.as_raw_UMat(), sizes.as_raw_VectorOfint(), _type, usage_flags) }.into_result() } /// increases the reference counter; use with care to avoid memleaks pub fn addref(&mut self) -> Result<()> { unsafe { sys::cv_UMat_addref(self.as_raw_UMat()) }.into_result() } /// decreases reference counter; pub fn release(&mut self) -> Result<()> { unsafe { sys::cv_UMat_release(self.as_raw_UMat()) }.into_result() } /// deallocates the matrix data pub fn deallocate(&mut self) -> Result<()> { unsafe { sys::cv_UMat_deallocate(self.as_raw_UMat()) }.into_result() } /// locates matrix header within a parent matrix. See below pub fn locate_roi(&self, whole_size: &mut core::Size, ofs: &mut core::Point) -> Result<()> { unsafe { sys::cv_UMat_locateROI_const_Size_Point(self.as_raw_UMat(), whole_size, ofs) }.into_result() } /// moves/resizes the current matrix ROI inside the parent matrix. pub fn adjust_roi(&mut self, dtop: i32, dbottom: i32, dleft: i32, dright: i32) -> Result<core::UMat> { unsafe { sys::cv_UMat_adjustROI_int_int_int_int(self.as_raw_UMat(), dtop, dbottom, dleft, dright) }.into_result().map(|ptr| core::UMat { ptr }) } /// returns true iff the matrix data is continuous pub fn is_continuous(&self) -> Result<bool> { unsafe { sys::cv_UMat_isContinuous_const(self.as_raw_UMat()) }.into_result() } /// returns true if the matrix is a submatrix of another matrix pub fn is_submatrix(&self) -> Result<bool> { unsafe { sys::cv_UMat_isSubmatrix_const(self.as_raw_UMat()) }.into_result() } /// returns element size in bytes, pub fn elem_size(&self) -> Result<size_t> { unsafe { sys::cv_UMat_elemSize_const(self.as_raw_UMat()) }.into_result() } /// returns the size of element channel in bytes. pub fn elem_size1(&self) -> Result<size_t> { unsafe { sys::cv_UMat_elemSize1_const(self.as_raw_UMat()) }.into_result() } /// returns element type, similar to CV_MAT_TYPE(cvmat->type) pub fn typ(&self) -> Result<i32> { unsafe { sys::cv_UMat_type_const(self.as_raw_UMat()) }.into_result() } /// returns element type, similar to CV_MAT_DEPTH(cvmat->type) pub fn depth(&self) -> Result<i32> { unsafe { sys::cv_UMat_depth_const(self.as_raw_UMat()) }.into_result() } /// returns element type, similar to CV_MAT_CN(cvmat->type) pub fn channels(&self) -> Result<i32> { unsafe { sys::cv_UMat_channels_const(self.as_raw_UMat()) }.into_result() } /// returns step/elemSize1() /// /// ## C++ default parameters /// * i: 0 pub fn step1(&self, i: i32) -> Result<size_t> { unsafe { sys::cv_UMat_step1_const_int(self.as_raw_UMat(), i) }.into_result() } /// returns true if matrix data is NULL pub fn empty(&self) -> Result<bool> { unsafe { sys::cv_UMat_empty_const(self.as_raw_UMat()) }.into_result() } /// returns the total number of matrix elements pub fn total(&self) -> Result<size_t> { unsafe { sys::cv_UMat_total_const(self.as_raw_UMat()) }.into_result() } /// returns N if the matrix is 1-channel (N x ptdim) or ptdim-channel (1 x N) or (N x 1); negative number otherwise /// /// ## C++ default parameters /// * depth: -1 /// * require_continuous: true pub fn check_vector(&self, elem_channels: i32, depth: i32, require_continuous: bool) -> Result<i32> { unsafe { sys::cv_UMat_checkVector_const_int_int_bool(self.as_raw_UMat(), elem_channels, depth, require_continuous) }.into_result() } pub fn handle(&self, access_flags: i32) -> Result<&mut c_void> { unsafe { sys::cv_UMat_handle_const_int(self.as_raw_UMat(), access_flags) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } pub fn ndoffset(&self, ofs: &mut size_t) -> Result<()> { unsafe { sys::cv_UMat_ndoffset_const_size_t_X(self.as_raw_UMat(), ofs) }.into_result() } /// internal use method: updates the continuity flag pub fn update_continuity_flag(&mut self) -> Result<()> { unsafe { sys::cv_UMat_updateContinuityFlag(self.as_raw_UMat()) }.into_result() } } // boxed class cv::UMatData pub struct UMatData { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for UMatData { fn drop(&mut self) { unsafe { sys::cv_UMatData_delete(self.ptr) }; } } impl UMatData { #[inline(always)] pub fn as_raw_UMatData(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for UMatData {} impl UMatData { pub fn lock(&mut self) -> Result<()> { unsafe { sys::cv_UMatData_lock(self.as_raw_UMatData()) }.into_result() } pub fn unlock(&mut self) -> Result<()> { unsafe { sys::cv_UMatData_unlock(self.as_raw_UMatData()) }.into_result() } pub fn host_copy_obsolete(&self) -> Result<bool> { unsafe { sys::cv_UMatData_hostCopyObsolete_const(self.as_raw_UMatData()) }.into_result() } pub fn device_copy_obsolete(&self) -> Result<bool> { unsafe { sys::cv_UMatData_deviceCopyObsolete_const(self.as_raw_UMatData()) }.into_result() } pub fn device_mem_mapped(&self) -> Result<bool> { unsafe { sys::cv_UMatData_deviceMemMapped_const(self.as_raw_UMatData()) }.into_result() } pub fn copy_on_map(&self) -> Result<bool> { unsafe { sys::cv_UMatData_copyOnMap_const(self.as_raw_UMatData()) }.into_result() } pub fn temp_u_mat(&self) -> Result<bool> { unsafe { sys::cv_UMatData_tempUMat_const(self.as_raw_UMatData()) }.into_result() } pub fn temp_copied_u_mat(&self) -> Result<bool> { unsafe { sys::cv_UMatData_tempCopiedUMat_const(self.as_raw_UMatData()) }.into_result() } pub fn mark_host_copy_obsolete(&mut self, flag: bool) -> Result<()> { unsafe { sys::cv_UMatData_markHostCopyObsolete_bool(self.as_raw_UMatData(), flag) }.into_result() } pub fn mark_device_copy_obsolete(&mut self, flag: bool) -> Result<()> { unsafe { sys::cv_UMatData_markDeviceCopyObsolete_bool(self.as_raw_UMatData(), flag) }.into_result() } pub fn mark_device_mem_mapped(&mut self, flag: bool) -> Result<()> { unsafe { sys::cv_UMatData_markDeviceMemMapped_bool(self.as_raw_UMatData(), flag) }.into_result() } } // Generating impl for trait core::_InputArray /// This is the proxy class for passing read-only input arrays into OpenCV functions. /// /// It is defined as: /// ```ignore /// typedef const _InputArray& InputArray; /// ``` /// /// where _InputArray is a class that can be constructed from `Mat`, `Mat_<T>`, `Matx<T, m, n>`, /// `std::vector<T>`, `std::vector<std::vector<T> >`, `std::vector<Mat>`, `std::vector<Mat_<T> >`, /// `UMat`, `std::vector<UMat>` or `double`. It can also be constructed from a matrix expression. /// /// Since this is mostly implementation-level class, and its interface may change in future versions, we /// do not describe it in details. There are a few key things, though, that should be kept in mind: /// /// * When you see in the reference manual or in OpenCV source code a function that takes /// InputArray, it means that you can actually pass `Mat`, `Matx`, `vector<T>` etc. (see above the /// complete list). /// * Optional input arguments: If some of the input arrays may be empty, pass cv::noArray() (or /// simply cv::Mat() as you probably did before). /// * The class is designed solely for passing parameters. That is, normally you *should not* /// declare class members, local and global variables of this type. /// * If you want to design your own function or a class method that can operate of arrays of /// multiple types, you can use InputArray (or OutputArray) for the respective parameters. Inside /// a function you should use _InputArray::getMat() method to construct a matrix header for the /// array (without copying data). _InputArray::kind() can be used to distinguish Mat from /// `vector<>` etc., but normally it is not needed. /// /// Here is how you can use a function that takes InputArray : /// ```ignore /// std::vector<Point2f> vec; /// // points or a circle /// for( int i = 0; i < 30; i++ ) /// vec.push_back(Point2f((float)(100 + 30*cos(i*CV_PI*2/5)), /// (float)(100 - 30*sin(i*CV_PI*2/5)))); /// cv::transform(vec, vec, cv::Matx23f(0.707, -0.707, 10, 0.707, 0.707, 20)); /// ``` /// /// That is, we form an STL vector containing points, and apply in-place affine transformation to the /// vector using the 2x3 matrix created inline as `Matx<float, 2, 3>` instance. /// /// Here is how such a function can be implemented (for simplicity, we implement a very specific case of /// it, according to the assertion statement inside) : /// ```ignore /// void myAffineTransform(InputArray _src, OutputArray _dst, InputArray _m) /// { /// // get Mat headers for input arrays. This is O(1) operation, /// // unless _src and/or _m are matrix expressions. /// Mat src = _src.getMat(), m = _m.getMat(); /// CV_Assert( src.type() == CV_32FC2 && m.type() == CV_32F && m.size() == Size(3, 2) ); /// /// // [re]create the output array so that it has the proper size and type. /// // In case of Mat it calls Mat::create, in case of STL vector it calls vector::resize. /// _dst.create(src.size(), src.type()); /// Mat dst = _dst.getMat(); /// /// for( int i = 0; i < src.rows; i++ ) /// for( int j = 0; j < src.cols; j++ ) /// { /// Point2f pt = src.at<Point2f>(i, j); /// dst.at<Point2f>(i, j) = Point2f(m.at<float>(0, 0)*pt.x + /// m.at<float>(0, 1)*pt.y + /// m.at<float>(0, 2), /// m.at<float>(1, 0)*pt.x + /// m.at<float>(1, 1)*pt.y + /// m.at<float>(1, 2)); /// } /// } /// ``` /// /// There is another related type, InputArrayOfArrays, which is currently defined as a synonym for /// InputArray: /// ```ignore /// typedef InputArray InputArrayOfArrays; /// ``` /// /// It denotes function arguments that are either vectors of vectors or vectors of matrices. A separate /// synonym is needed to generate Python/Java etc. wrappers properly. At the function implementation /// level their use is similar, but _InputArray::getMat(idx) should be used to get header for the /// idx-th component of the outer vector and _InputArray::size().area() should be used to find the /// number of components (vectors/matrices) of the outer vector. /// /// In general, type support is limited to cv::Mat types. Other types are forbidden. /// But in some cases we need to support passing of custom non-general Mat types, like arrays of cv::KeyPoint, cv::DMatch, etc. /// This data is not intended to be interpreted as an image data, or processed somehow like regular cv::Mat. /// To pass such custom type use rawIn() / rawOut() / rawInOut() wrappers. /// Custom type is wrapped as Mat-compatible `CV_8UC<N>` values (N = sizeof(T), N <= CV_CN_MAX). pub trait _InputArrayTrait { #[inline(always)] fn as_raw__InputArray(&self) -> *mut c_void; /// /// ## C++ default parameters /// * idx: -1 fn get_mat(&self, idx: i32) -> Result<core::Mat> { unsafe { sys::cv__InputArray_getMat_const_int(self.as_raw__InputArray(), idx) }.into_result().map(|ptr| core::Mat { ptr }) } /// /// ## C++ default parameters /// * idx: -1 fn get_mat_(&self, idx: i32) -> Result<core::Mat> { unsafe { sys::cv__InputArray_getMat__const_int(self.as_raw__InputArray(), idx) }.into_result().map(|ptr| core::Mat { ptr }) } /// /// ## C++ default parameters /// * idx: -1 fn get_u_mat(&self, idx: i32) -> Result<core::UMat> { unsafe { sys::cv__InputArray_getUMat_const_int(self.as_raw__InputArray(), idx) }.into_result().map(|ptr| core::UMat { ptr }) } fn get_mat_vector(&self, mv: &mut types::VectorOfMat) -> Result<()> { unsafe { sys::cv__InputArray_getMatVector_const_VectorOfMat(self.as_raw__InputArray(), mv.as_raw_VectorOfMat()) }.into_result() } fn get_u_mat_vector(&self, umv: &mut types::VectorOfUMat) -> Result<()> { unsafe { sys::cv__InputArray_getUMatVector_const_VectorOfUMat(self.as_raw__InputArray(), umv.as_raw_VectorOfUMat()) }.into_result() } fn get_flags(&self) -> Result<i32> { unsafe { sys::cv__InputArray_getFlags_const(self.as_raw__InputArray()) }.into_result() } fn get_obj(&self) -> Result<&mut c_void> { unsafe { sys::cv__InputArray_getObj_const(self.as_raw__InputArray()) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } fn get_sz(&self) -> Result<core::Size> { unsafe { sys::cv__InputArray_getSz_const(self.as_raw__InputArray()) }.into_result() } fn kind(&self) -> Result<i32> { unsafe { sys::cv__InputArray_kind_const(self.as_raw__InputArray()) }.into_result() } /// /// ## C++ default parameters /// * i: -1 fn dims(&self, i: i32) -> Result<i32> { unsafe { sys::cv__InputArray_dims_const_int(self.as_raw__InputArray(), i) }.into_result() } /// /// ## C++ default parameters /// * i: -1 fn cols(&self, i: i32) -> Result<i32> { unsafe { sys::cv__InputArray_cols_const_int(self.as_raw__InputArray(), i) }.into_result() } /// /// ## C++ default parameters /// * i: -1 fn rows(&self, i: i32) -> Result<i32> { unsafe { sys::cv__InputArray_rows_const_int(self.as_raw__InputArray(), i) }.into_result() } /// /// ## C++ default parameters /// * i: -1 fn size(&self, i: i32) -> Result<core::Size> { unsafe { sys::cv__InputArray_size_const_int(self.as_raw__InputArray(), i) }.into_result() } /// /// ## C++ default parameters /// * i: -1 fn sizend(&self, sz: &mut i32, i: i32) -> Result<i32> { unsafe { sys::cv__InputArray_sizend_const_int_X_int(self.as_raw__InputArray(), sz, i) }.into_result() } fn same_size(&self, arr: &dyn core::ToInputArray) -> Result<bool> { input_array_arg!(arr); unsafe { sys::cv__InputArray_sameSize_const__InputArray(self.as_raw__InputArray(), arr.as_raw__InputArray()) }.into_result() } /// /// ## C++ default parameters /// * i: -1 fn total(&self, i: i32) -> Result<size_t> { unsafe { sys::cv__InputArray_total_const_int(self.as_raw__InputArray(), i) }.into_result() } /// /// ## C++ default parameters /// * i: -1 fn _type(&self, i: i32) -> Result<i32> { unsafe { sys::cv__InputArray_type_const_int(self.as_raw__InputArray(), i) }.into_result() } /// /// ## C++ default parameters /// * i: -1 fn depth(&self, i: i32) -> Result<i32> { unsafe { sys::cv__InputArray_depth_const_int(self.as_raw__InputArray(), i) }.into_result() } /// /// ## C++ default parameters /// * i: -1 fn channels(&self, i: i32) -> Result<i32> { unsafe { sys::cv__InputArray_channels_const_int(self.as_raw__InputArray(), i) }.into_result() } /// /// ## C++ default parameters /// * i: -1 fn is_continuous(&self, i: i32) -> Result<bool> { unsafe { sys::cv__InputArray_isContinuous_const_int(self.as_raw__InputArray(), i) }.into_result() } /// /// ## C++ default parameters /// * i: -1 fn is_submatrix(&self, i: i32) -> Result<bool> { unsafe { sys::cv__InputArray_isSubmatrix_const_int(self.as_raw__InputArray(), i) }.into_result() } fn empty(&self) -> Result<bool> { unsafe { sys::cv__InputArray_empty_const(self.as_raw__InputArray()) }.into_result() } fn copy_to(&self, arr: &mut dyn core::ToOutputArray) -> Result<()> { output_array_arg!(arr); unsafe { sys::cv__InputArray_copyTo_const__OutputArray(self.as_raw__InputArray(), arr.as_raw__OutputArray()) }.into_result() } fn copy_to_with_mask(&self, arr: &mut dyn core::ToOutputArray, mask: &dyn core::ToInputArray) -> Result<()> { output_array_arg!(arr); input_array_arg!(mask); unsafe { sys::cv__InputArray_copyTo_const__OutputArray__InputArray(self.as_raw__InputArray(), arr.as_raw__OutputArray(), mask.as_raw__InputArray()) }.into_result() } /// /// ## C++ default parameters /// * i: -1 fn offset(&self, i: i32) -> Result<size_t> { unsafe { sys::cv__InputArray_offset_const_int(self.as_raw__InputArray(), i) }.into_result() } /// /// ## C++ default parameters /// * i: -1 fn step(&self, i: i32) -> Result<size_t> { unsafe { sys::cv__InputArray_step_const_int(self.as_raw__InputArray(), i) }.into_result() } fn is_mat(&self) -> Result<bool> { unsafe { sys::cv__InputArray_isMat_const(self.as_raw__InputArray()) }.into_result() } fn is_u_mat(&self) -> Result<bool> { unsafe { sys::cv__InputArray_isUMat_const(self.as_raw__InputArray()) }.into_result() } fn is_mat_vector(&self) -> Result<bool> { unsafe { sys::cv__InputArray_isMatVector_const(self.as_raw__InputArray()) }.into_result() } fn is_u_mat_vector(&self) -> Result<bool> { unsafe { sys::cv__InputArray_isUMatVector_const(self.as_raw__InputArray()) }.into_result() } fn is_matx(&self) -> Result<bool> { unsafe { sys::cv__InputArray_isMatx_const(self.as_raw__InputArray()) }.into_result() } fn is_vector(&self) -> Result<bool> { unsafe { sys::cv__InputArray_isVector_const(self.as_raw__InputArray()) }.into_result() } fn is_gpu_mat(&self) -> Result<bool> { unsafe { sys::cv__InputArray_isGpuMat_const(self.as_raw__InputArray()) }.into_result() } fn is_gpu_mat_vector(&self) -> Result<bool> { unsafe { sys::cv__InputArray_isGpuMatVector_const(self.as_raw__InputArray()) }.into_result() } } // boxed class cv::_InputArray /// This is the proxy class for passing read-only input arrays into OpenCV functions. /// /// It is defined as: /// ```ignore /// typedef const _InputArray& InputArray; /// ``` /// /// where _InputArray is a class that can be constructed from `Mat`, `Mat_<T>`, `Matx<T, m, n>`, /// `std::vector<T>`, `std::vector<std::vector<T> >`, `std::vector<Mat>`, `std::vector<Mat_<T> >`, /// `UMat`, `std::vector<UMat>` or `double`. It can also be constructed from a matrix expression. /// /// Since this is mostly implementation-level class, and its interface may change in future versions, we /// do not describe it in details. There are a few key things, though, that should be kept in mind: /// /// * When you see in the reference manual or in OpenCV source code a function that takes /// InputArray, it means that you can actually pass `Mat`, `Matx`, `vector<T>` etc. (see above the /// complete list). /// * Optional input arguments: If some of the input arrays may be empty, pass cv::noArray() (or /// simply cv::Mat() as you probably did before). /// * The class is designed solely for passing parameters. That is, normally you *should not* /// declare class members, local and global variables of this type. /// * If you want to design your own function or a class method that can operate of arrays of /// multiple types, you can use InputArray (or OutputArray) for the respective parameters. Inside /// a function you should use _InputArray::getMat() method to construct a matrix header for the /// array (without copying data). _InputArray::kind() can be used to distinguish Mat from /// `vector<>` etc., but normally it is not needed. /// /// Here is how you can use a function that takes InputArray : /// ```ignore /// std::vector<Point2f> vec; /// // points or a circle /// for( int i = 0; i < 30; i++ ) /// vec.push_back(Point2f((float)(100 + 30*cos(i*CV_PI*2/5)), /// (float)(100 - 30*sin(i*CV_PI*2/5)))); /// cv::transform(vec, vec, cv::Matx23f(0.707, -0.707, 10, 0.707, 0.707, 20)); /// ``` /// /// That is, we form an STL vector containing points, and apply in-place affine transformation to the /// vector using the 2x3 matrix created inline as `Matx<float, 2, 3>` instance. /// /// Here is how such a function can be implemented (for simplicity, we implement a very specific case of /// it, according to the assertion statement inside) : /// ```ignore /// void myAffineTransform(InputArray _src, OutputArray _dst, InputArray _m) /// { /// // get Mat headers for input arrays. This is O(1) operation, /// // unless _src and/or _m are matrix expressions. /// Mat src = _src.getMat(), m = _m.getMat(); /// CV_Assert( src.type() == CV_32FC2 && m.type() == CV_32F && m.size() == Size(3, 2) ); /// /// // [re]create the output array so that it has the proper size and type. /// // In case of Mat it calls Mat::create, in case of STL vector it calls vector::resize. /// _dst.create(src.size(), src.type()); /// Mat dst = _dst.getMat(); /// /// for( int i = 0; i < src.rows; i++ ) /// for( int j = 0; j < src.cols; j++ ) /// { /// Point2f pt = src.at<Point2f>(i, j); /// dst.at<Point2f>(i, j) = Point2f(m.at<float>(0, 0)*pt.x + /// m.at<float>(0, 1)*pt.y + /// m.at<float>(0, 2), /// m.at<float>(1, 0)*pt.x + /// m.at<float>(1, 1)*pt.y + /// m.at<float>(1, 2)); /// } /// } /// ``` /// /// There is another related type, InputArrayOfArrays, which is currently defined as a synonym for /// InputArray: /// ```ignore /// typedef InputArray InputArrayOfArrays; /// ``` /// /// It denotes function arguments that are either vectors of vectors or vectors of matrices. A separate /// synonym is needed to generate Python/Java etc. wrappers properly. At the function implementation /// level their use is similar, but _InputArray::getMat(idx) should be used to get header for the /// idx-th component of the outer vector and _InputArray::size().area() should be used to find the /// number of components (vectors/matrices) of the outer vector. /// /// In general, type support is limited to cv::Mat types. Other types are forbidden. /// But in some cases we need to support passing of custom non-general Mat types, like arrays of cv::KeyPoint, cv::DMatch, etc. /// This data is not intended to be interpreted as an image data, or processed somehow like regular cv::Mat. /// To pass such custom type use rawIn() / rawOut() / rawInOut() wrappers. /// Custom type is wrapped as Mat-compatible `CV_8UC<N>` values (N = sizeof(T), N <= CV_CN_MAX). pub struct _InputArray { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for _InputArray { fn drop(&mut self) { unsafe { sys::cv__InputArray_delete(self.ptr) }; } } impl _InputArray { #[inline(always)] pub fn as_raw__InputArray(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for _InputArray {} impl core::_InputArrayTrait for _InputArray { #[inline(always)] fn as_raw__InputArray(&self) -> *mut c_void { self.ptr } } impl _InputArray { pub fn default() -> Result<core::_InputArray> { unsafe { sys::cv__InputArray__InputArray() }.into_result().map(|ptr| core::_InputArray { ptr }) } pub fn new(_flags: i32, _obj: &mut c_void) -> Result<core::_InputArray> { unsafe { sys::cv__InputArray__InputArray_int_void_X(_flags, _obj) }.into_result().map(|ptr| core::_InputArray { ptr }) } pub fn from_mat(m: &core::Mat) -> Result<core::_InputArray> { unsafe { sys::cv__InputArray__InputArray_Mat(m.as_raw_Mat()) }.into_result().map(|ptr| core::_InputArray { ptr }) } pub fn from_matexpr(expr: &core::MatExpr) -> Result<core::_InputArray> { unsafe { sys::cv__InputArray__InputArray_MatExpr(expr.as_raw_MatExpr()) }.into_result().map(|ptr| core::_InputArray { ptr }) } pub fn from_mat_vec(vec: &types::VectorOfMat) -> Result<core::_InputArray> { unsafe { sys::cv__InputArray__InputArray_VectorOfMat(vec.as_raw_VectorOfMat()) }.into_result().map(|ptr| core::_InputArray { ptr }) } pub fn from_bool_vec(vec: &types::VectorOfbool) -> Result<core::_InputArray> { unsafe { sys::cv__InputArray__InputArray_VectorOfbool(vec.as_raw_VectorOfbool()) }.into_result().map(|ptr| core::_InputArray { ptr }) } pub fn new_1(unnamed_arg: &types::VectorOfVectorOfbool) -> Result<core::_InputArray> { unsafe { sys::cv__InputArray__InputArray_VectorOfVectorOfbool(unnamed_arg.as_raw_VectorOfVectorOfbool()) }.into_result().map(|ptr| core::_InputArray { ptr }) } pub fn from_f64(val: &f64) -> Result<core::_InputArray> { unsafe { sys::cv__InputArray__InputArray_double(val) }.into_result().map(|ptr| core::_InputArray { ptr }) } pub fn from_umat(um: &core::UMat) -> Result<core::_InputArray> { unsafe { sys::cv__InputArray__InputArray_UMat(um.as_raw_UMat()) }.into_result().map(|ptr| core::_InputArray { ptr }) } pub fn from_umat_vec(umv: &types::VectorOfUMat) -> Result<core::_InputArray> { unsafe { sys::cv__InputArray__InputArray_VectorOfUMat(umv.as_raw_VectorOfUMat()) }.into_result().map(|ptr| core::_InputArray { ptr }) } } // Generating impl for trait core::_InputOutputArray pub trait _InputOutputArrayTrait: core::_OutputArrayTrait { #[inline(always)] fn as_raw__InputOutputArray(&self) -> *mut c_void; } // boxed class cv::_InputOutputArray pub struct _InputOutputArray { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for _InputOutputArray { fn drop(&mut self) { unsafe { sys::cv__InputOutputArray_delete(self.ptr) }; } } impl _InputOutputArray { #[inline(always)] pub fn as_raw__InputOutputArray(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for _InputOutputArray {} impl core::_InputArrayTrait for _InputOutputArray { #[inline(always)] fn as_raw__InputArray(&self) -> *mut c_void { self.ptr } } impl core::_InputOutputArrayTrait for _InputOutputArray { #[inline(always)] fn as_raw__InputOutputArray(&self) -> *mut c_void { self.ptr } } impl core::_OutputArrayTrait for _InputOutputArray { #[inline(always)] fn as_raw__OutputArray(&self) -> *mut c_void { self.ptr } } impl _InputOutputArray { pub fn default() -> Result<core::_InputOutputArray> { unsafe { sys::cv__InputOutputArray__InputOutputArray() }.into_result().map(|ptr| core::_InputOutputArray { ptr }) } pub fn new(_flags: i32, _obj: &mut c_void) -> Result<core::_InputOutputArray> { unsafe { sys::cv__InputOutputArray__InputOutputArray_int_void_X(_flags, _obj) }.into_result().map(|ptr| core::_InputOutputArray { ptr }) } pub fn from_mat(m: &mut core::Mat) -> Result<core::_InputOutputArray> { unsafe { sys::cv__InputOutputArray__InputOutputArray_Mat(m.as_raw_Mat()) }.into_result().map(|ptr| core::_InputOutputArray { ptr }) } pub fn from_mat_vec(vec: &mut types::VectorOfMat) -> Result<core::_InputOutputArray> { unsafe { sys::cv__InputOutputArray__InputOutputArray_VectorOfMat(vec.as_raw_VectorOfMat()) }.into_result().map(|ptr| core::_InputOutputArray { ptr }) } pub fn new_1(vec: &mut types::VectorOfbool) -> Result<core::_InputOutputArray> { unsafe { sys::cv__InputOutputArray__InputOutputArray_VectorOfbool(vec.as_raw_VectorOfbool()) }.into_result().map(|ptr| core::_InputOutputArray { ptr }) } pub fn from_umat(m: &mut core::UMat) -> Result<core::_InputOutputArray> { unsafe { sys::cv__InputOutputArray__InputOutputArray_UMat(m.as_raw_UMat()) }.into_result().map(|ptr| core::_InputOutputArray { ptr }) } pub fn from_umat_vec(vec: &mut types::VectorOfUMat) -> Result<core::_InputOutputArray> { unsafe { sys::cv__InputOutputArray__InputOutputArray_VectorOfUMat(vec.as_raw_VectorOfUMat()) }.into_result().map(|ptr| core::_InputOutputArray { ptr }) } } // Generating impl for trait core::_OutputArray /// This type is very similar to InputArray except that it is used for input/output and output function /// parameters. /// /// Just like with InputArray, OpenCV users should not care about OutputArray, they just pass `Mat`, /// `vector<T>` etc. to the functions. The same limitation as for `InputArray`: *Do not explicitly /// create OutputArray instances* applies here too. /// /// If you want to make your function polymorphic (i.e. accept different arrays as output parameters), /// it is also not very difficult. Take the sample above as the reference. Note that /// _OutputArray::create() needs to be called before _OutputArray::getMat(). This way you guarantee /// that the output array is properly allocated. /// /// Optional output parameters. If you do not need certain output array to be computed and returned to /// you, pass cv::noArray(), just like you would in the case of optional input array. At the /// implementation level, use _OutputArray::needed() to check if certain output array needs to be /// computed or not. /// /// There are several synonyms for OutputArray that are used to assist automatic Python/Java/... wrapper /// generators: /// ```ignore /// typedef OutputArray OutputArrayOfArrays; /// typedef OutputArray InputOutputArray; /// typedef OutputArray InputOutputArrayOfArrays; /// ``` pub trait _OutputArrayTrait: core::_InputArrayTrait { #[inline(always)] fn as_raw__OutputArray(&self) -> *mut c_void; fn fixed_size(&self) -> Result<bool> { unsafe { sys::cv__OutputArray_fixedSize_const(self.as_raw__OutputArray()) }.into_result() } fn fixed_type(&self) -> Result<bool> { unsafe { sys::cv__OutputArray_fixedType_const(self.as_raw__OutputArray()) }.into_result() } fn needed(&self) -> Result<bool> { unsafe { sys::cv__OutputArray_needed_const(self.as_raw__OutputArray()) }.into_result() } /// /// ## C++ default parameters /// * i: -1 fn get_mat_ref(&self, i: i32) -> Result<core::Mat> { unsafe { sys::cv__OutputArray_getMatRef_const_int(self.as_raw__OutputArray(), i) }.into_result().map(|ptr| core::Mat { ptr }) } /// /// ## C++ default parameters /// * i: -1 fn get_u_mat_ref(&self, i: i32) -> Result<core::UMat> { unsafe { sys::cv__OutputArray_getUMatRef_const_int(self.as_raw__OutputArray(), i) }.into_result().map(|ptr| core::UMat { ptr }) } /// /// ## C++ default parameters /// * i: -1 /// * allow_transposed: false /// * fixed_depth_mask: 0 fn create(&self, sz: core::Size, _type: i32, i: i32, allow_transposed: bool, fixed_depth_mask: i32) -> Result<()> { unsafe { sys::cv__OutputArray_create_const_Size_int_int_bool_int(self.as_raw__OutputArray(), sz, _type, i, allow_transposed, fixed_depth_mask) }.into_result() } /// /// ## C++ default parameters /// * i: -1 /// * allow_transposed: false /// * fixed_depth_mask: 0 fn create_1(&self, rows: i32, cols: i32, _type: i32, i: i32, allow_transposed: bool, fixed_depth_mask: i32) -> Result<()> { unsafe { sys::cv__OutputArray_create_const_int_int_int_int_bool_int(self.as_raw__OutputArray(), rows, cols, _type, i, allow_transposed, fixed_depth_mask) }.into_result() } /// /// ## C++ default parameters /// * i: -1 /// * allow_transposed: false /// * fixed_depth_mask: 0 fn create_2(&self, dims: i32, size: &i32, _type: i32, i: i32, allow_transposed: bool, fixed_depth_mask: i32) -> Result<()> { unsafe { sys::cv__OutputArray_create_const_int_const_int_X_int_int_bool_int(self.as_raw__OutputArray(), dims, size, _type, i, allow_transposed, fixed_depth_mask) }.into_result() } fn create_same_size(&self, arr: &dyn core::ToInputArray, mtype: i32) -> Result<()> { input_array_arg!(arr); unsafe { sys::cv__OutputArray_createSameSize_const__InputArray_int(self.as_raw__OutputArray(), arr.as_raw__InputArray(), mtype) }.into_result() } fn release(&self) -> Result<()> { unsafe { sys::cv__OutputArray_release_const(self.as_raw__OutputArray()) }.into_result() } fn clear(&self) -> Result<()> { unsafe { sys::cv__OutputArray_clear_const(self.as_raw__OutputArray()) }.into_result() } /// /// ## C++ default parameters /// * mask: _InputArray() fn set_to(&self, value: &dyn core::ToInputArray, mask: &dyn core::ToInputArray) -> Result<()> { input_array_arg!(value); input_array_arg!(mask); unsafe { sys::cv__OutputArray_setTo_const__InputArray__InputArray(self.as_raw__OutputArray(), value.as_raw__InputArray(), mask.as_raw__InputArray()) }.into_result() } fn assign(&self, u: &core::UMat) -> Result<()> { unsafe { sys::cv__OutputArray_assign_const_UMat(self.as_raw__OutputArray(), u.as_raw_UMat()) }.into_result() } fn assign_1(&self, m: &core::Mat) -> Result<()> { unsafe { sys::cv__OutputArray_assign_const_Mat(self.as_raw__OutputArray(), m.as_raw_Mat()) }.into_result() } fn assign_2(&self, v: &types::VectorOfUMat) -> Result<()> { unsafe { sys::cv__OutputArray_assign_const_VectorOfUMat(self.as_raw__OutputArray(), v.as_raw_VectorOfUMat()) }.into_result() } fn assign_3(&self, v: &types::VectorOfMat) -> Result<()> { unsafe { sys::cv__OutputArray_assign_const_VectorOfMat(self.as_raw__OutputArray(), v.as_raw_VectorOfMat()) }.into_result() } fn _move(&self, u: &mut core::UMat) -> Result<()> { unsafe { sys::cv__OutputArray_move_const_UMat(self.as_raw__OutputArray(), u.as_raw_UMat()) }.into_result() } fn _move_1(&self, m: &mut core::Mat) -> Result<()> { unsafe { sys::cv__OutputArray_move_const_Mat(self.as_raw__OutputArray(), m.as_raw_Mat()) }.into_result() } } // boxed class cv::_OutputArray /// This type is very similar to InputArray except that it is used for input/output and output function /// parameters. /// /// Just like with InputArray, OpenCV users should not care about OutputArray, they just pass `Mat`, /// `vector<T>` etc. to the functions. The same limitation as for `InputArray`: *Do not explicitly /// create OutputArray instances* applies here too. /// /// If you want to make your function polymorphic (i.e. accept different arrays as output parameters), /// it is also not very difficult. Take the sample above as the reference. Note that /// _OutputArray::create() needs to be called before _OutputArray::getMat(). This way you guarantee /// that the output array is properly allocated. /// /// Optional output parameters. If you do not need certain output array to be computed and returned to /// you, pass cv::noArray(), just like you would in the case of optional input array. At the /// implementation level, use _OutputArray::needed() to check if certain output array needs to be /// computed or not. /// /// There are several synonyms for OutputArray that are used to assist automatic Python/Java/... wrapper /// generators: /// ```ignore /// typedef OutputArray OutputArrayOfArrays; /// typedef OutputArray InputOutputArray; /// typedef OutputArray InputOutputArrayOfArrays; /// ``` pub struct _OutputArray { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for _OutputArray { fn drop(&mut self) { unsafe { sys::cv__OutputArray_delete(self.ptr) }; } } impl _OutputArray { #[inline(always)] pub fn as_raw__OutputArray(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for _OutputArray {} impl core::_InputArrayTrait for _OutputArray { #[inline(always)] fn as_raw__InputArray(&self) -> *mut c_void { self.ptr } } impl core::_OutputArrayTrait for _OutputArray { #[inline(always)] fn as_raw__OutputArray(&self) -> *mut c_void { self.ptr } } impl _OutputArray { pub fn default() -> Result<core::_OutputArray> { unsafe { sys::cv__OutputArray__OutputArray() }.into_result().map(|ptr| core::_OutputArray { ptr }) } pub fn new(_flags: i32, _obj: &mut c_void) -> Result<core::_OutputArray> { unsafe { sys::cv__OutputArray__OutputArray_int_void_X(_flags, _obj) }.into_result().map(|ptr| core::_OutputArray { ptr }) } pub fn from_mat(m: &mut core::Mat) -> Result<core::_OutputArray> { unsafe { sys::cv__OutputArray__OutputArray_Mat(m.as_raw_Mat()) }.into_result().map(|ptr| core::_OutputArray { ptr }) } pub fn from_mat_vec(vec: &mut types::VectorOfMat) -> Result<core::_OutputArray> { unsafe { sys::cv__OutputArray__OutputArray_VectorOfMat(vec.as_raw_VectorOfMat()) }.into_result().map(|ptr| core::_OutputArray { ptr }) } pub fn new_1(vec: &mut types::VectorOfbool) -> Result<core::_OutputArray> { unsafe { sys::cv__OutputArray__OutputArray_VectorOfbool(vec.as_raw_VectorOfbool()) }.into_result().map(|ptr| core::_OutputArray { ptr }) } pub fn new_2(unnamed_arg: &mut types::VectorOfVectorOfbool) -> Result<core::_OutputArray> { unsafe { sys::cv__OutputArray__OutputArray_VectorOfVectorOfbool(unnamed_arg.as_raw_VectorOfVectorOfbool()) }.into_result().map(|ptr| core::_OutputArray { ptr }) } pub fn from_umat(m: &mut core::UMat) -> Result<core::_OutputArray> { unsafe { sys::cv__OutputArray__OutputArray_UMat(m.as_raw_UMat()) }.into_result().map(|ptr| core::_OutputArray { ptr }) } pub fn from_umat_vec(vec: &mut types::VectorOfUMat) -> Result<core::_OutputArray> { unsafe { sys::cv__OutputArray__OutputArray_VectorOfUMat(vec.as_raw_VectorOfUMat()) }.into_result().map(|ptr| core::_OutputArray { ptr }) } } // boxed class cv::detail::CheckContext pub struct CheckContext { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for CheckContext { fn drop(&mut self) { unsafe { sys::cv_CheckContext_delete(self.ptr) }; } } impl CheckContext { #[inline(always)] pub fn as_raw_CheckContext(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for CheckContext {} // boxed class cv::instr::NodeData pub struct NodeData { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for NodeData { fn drop(&mut self) { unsafe { sys::cv_NodeData_delete(self.ptr) }; } } impl NodeData { #[inline(always)] pub fn as_raw_NodeData(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for NodeData {} impl NodeData { /// /// ## C++ default parameters /// * fun_name: 0 /// * file_name: NULL /// * line_num: 0 /// * ret_address: NULL /// * always_expand: false /// * instr_type: TYPE_GENERAL /// * impl_type: IMPL_PLAIN pub fn new(fun_name: &str, file_name: &str, line_num: i32, ret_address: &mut c_void, always_expand: bool, instr_type: core::TYPE, impl_type: core::IMPL) -> Result<core::NodeData> { string_arg!(fun_name); string_arg!(file_name); unsafe { sys::cv_instr_NodeData_NodeData_const_char_X_const_char_X_int_void_X_bool_TYPE_IMPL(fun_name.as_ptr(), file_name.as_ptr(), line_num, ret_address, always_expand, instr_type, impl_type) }.into_result().map(|ptr| core::NodeData { ptr }) } pub fn copy(_ref: &mut core::NodeData) -> Result<core::NodeData> { unsafe { sys::cv_instr_NodeData_NodeData_NodeData(_ref.as_raw_NodeData()) }.into_result().map(|ptr| core::NodeData { ptr }) } pub fn get_total_ms(&self) -> Result<f64> { unsafe { sys::cv_instr_NodeData_getTotalMs_const(self.as_raw_NodeData()) }.into_result() } pub fn get_mean_ms(&self) -> Result<f64> { unsafe { sys::cv_instr_NodeData_getMeanMs_const(self.as_raw_NodeData()) }.into_result() } } // boxed class cv::instr::NodeDataTls pub struct NodeDataTls { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for NodeDataTls { fn drop(&mut self) { unsafe { sys::cv_NodeDataTls_delete(self.ptr) }; } } impl NodeDataTls { #[inline(always)] pub fn as_raw_NodeDataTls(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for NodeDataTls {} impl NodeDataTls { pub fn default() -> Result<core::NodeDataTls> { unsafe { sys::cv_instr_NodeDataTls_NodeDataTls() }.into_result().map(|ptr| core::NodeDataTls { ptr }) } } // boxed class cv::internal::WriteStructContext pub struct WriteStructContext { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for WriteStructContext { fn drop(&mut self) { unsafe { sys::cv_WriteStructContext_delete(self.ptr) }; } } impl WriteStructContext { #[inline(always)] pub fn as_raw_WriteStructContext(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for WriteStructContext {} impl WriteStructContext { /// /// ## C++ default parameters /// * type_name: String() pub fn new(_fs: &mut core::FileStorage, name: &str, flags: i32, type_name: &str) -> Result<core::WriteStructContext> { string_arg!(name); string_arg!(type_name); unsafe { sys::cv_internal_WriteStructContext_WriteStructContext_FileStorage_String_int_String(_fs.as_raw_FileStorage(), name.as_ptr(), flags, type_name.as_ptr()) }.into_result().map(|ptr| core::WriteStructContext { ptr }) } } // boxed class cv::ocl::Context pub struct Context { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Context { fn drop(&mut self) { unsafe { sys::cv_Context_delete(self.ptr) }; } } impl Context { #[inline(always)] pub fn as_raw_Context(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Context {} impl Context { pub fn default() -> Result<core::Context> { unsafe { sys::cv_ocl_Context_Context() }.into_result().map(|ptr| core::Context { ptr }) } pub fn new_with_type(dtype: i32) -> Result<core::Context> { unsafe { sys::cv_ocl_Context_Context_int(dtype) }.into_result().map(|ptr| core::Context { ptr }) } pub fn copy(c: &core::Context) -> Result<core::Context> { unsafe { sys::cv_ocl_Context_Context_Context(c.as_raw_Context()) }.into_result().map(|ptr| core::Context { ptr }) } pub fn create(&mut self) -> Result<bool> { unsafe { sys::cv_ocl_Context_create(self.as_raw_Context()) }.into_result() } pub fn create_with_type(&mut self, dtype: i32) -> Result<bool> { unsafe { sys::cv_ocl_Context_create_int(self.as_raw_Context(), dtype) }.into_result() } pub fn ndevices(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Context_ndevices_const(self.as_raw_Context()) }.into_result() } pub fn device(&self, idx: size_t) -> Result<core::Device> { unsafe { sys::cv_ocl_Context_device_const_size_t(self.as_raw_Context(), idx) }.into_result().map(|ptr| core::Device { ptr }) } pub fn ptr(&self) -> Result<&mut c_void> { unsafe { sys::cv_ocl_Context_ptr_const(self.as_raw_Context()) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } pub fn use_svm(&self) -> Result<bool> { unsafe { sys::cv_ocl_Context_useSVM_const(self.as_raw_Context()) }.into_result() } pub fn set_use_svm(&mut self, enabled: bool) -> Result<()> { unsafe { sys::cv_ocl_Context_setUseSVM_bool(self.as_raw_Context(), enabled) }.into_result() } } // boxed class cv::ocl::Device pub struct Device { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Device { fn drop(&mut self) { unsafe { sys::cv_Device_delete(self.ptr) }; } } impl Device { #[inline(always)] pub fn as_raw_Device(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Device {} impl Device { pub fn default() -> Result<core::Device> { unsafe { sys::cv_ocl_Device_Device() }.into_result().map(|ptr| core::Device { ptr }) } pub fn new(d: &mut c_void) -> Result<core::Device> { unsafe { sys::cv_ocl_Device_Device_void_X(d) }.into_result().map(|ptr| core::Device { ptr }) } pub fn copy(d: &core::Device) -> Result<core::Device> { unsafe { sys::cv_ocl_Device_Device_Device(d.as_raw_Device()) }.into_result().map(|ptr| core::Device { ptr }) } pub fn set(&mut self, d: &mut c_void) -> Result<()> { unsafe { sys::cv_ocl_Device_set_void_X(self.as_raw_Device(), d) }.into_result() } pub fn name(&self) -> Result<String> { unsafe { sys::cv_ocl_Device_name_const(self.as_raw_Device()) }.into_result().map(crate::templ::receive_string_mut) } pub fn extensions(&self) -> Result<String> { unsafe { sys::cv_ocl_Device_extensions_const(self.as_raw_Device()) }.into_result().map(crate::templ::receive_string_mut) } pub fn is_extension_supported(&self, extension_name: &str) -> Result<bool> { string_arg!(extension_name); unsafe { sys::cv_ocl_Device_isExtensionSupported_const_String(self.as_raw_Device(), extension_name.as_ptr()) }.into_result() } pub fn version(&self) -> Result<String> { unsafe { sys::cv_ocl_Device_version_const(self.as_raw_Device()) }.into_result().map(crate::templ::receive_string_mut) } pub fn vendor_name(&self) -> Result<String> { unsafe { sys::cv_ocl_Device_vendorName_const(self.as_raw_Device()) }.into_result().map(crate::templ::receive_string_mut) } pub fn opencl_c_version(&self) -> Result<String> { unsafe { sys::cv_ocl_Device_OpenCL_C_Version_const(self.as_raw_Device()) }.into_result().map(crate::templ::receive_string_mut) } pub fn opencl_version(&self) -> Result<String> { unsafe { sys::cv_ocl_Device_OpenCLVersion_const(self.as_raw_Device()) }.into_result().map(crate::templ::receive_string_mut) } pub fn device_version_major(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_deviceVersionMajor_const(self.as_raw_Device()) }.into_result() } pub fn device_version_minor(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_deviceVersionMinor_const(self.as_raw_Device()) }.into_result() } pub fn driver_version(&self) -> Result<String> { unsafe { sys::cv_ocl_Device_driverVersion_const(self.as_raw_Device()) }.into_result().map(crate::templ::receive_string_mut) } pub fn ptr(&self) -> Result<&mut c_void> { unsafe { sys::cv_ocl_Device_ptr_const(self.as_raw_Device()) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } pub fn _type(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_type_const(self.as_raw_Device()) }.into_result() } pub fn address_bits(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_addressBits_const(self.as_raw_Device()) }.into_result() } pub fn available(&self) -> Result<bool> { unsafe { sys::cv_ocl_Device_available_const(self.as_raw_Device()) }.into_result() } pub fn compiler_available(&self) -> Result<bool> { unsafe { sys::cv_ocl_Device_compilerAvailable_const(self.as_raw_Device()) }.into_result() } pub fn linker_available(&self) -> Result<bool> { unsafe { sys::cv_ocl_Device_linkerAvailable_const(self.as_raw_Device()) }.into_result() } pub fn double_fp_config(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_doubleFPConfig_const(self.as_raw_Device()) }.into_result() } pub fn single_fp_config(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_singleFPConfig_const(self.as_raw_Device()) }.into_result() } pub fn half_fp_config(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_halfFPConfig_const(self.as_raw_Device()) }.into_result() } pub fn endian_little(&self) -> Result<bool> { unsafe { sys::cv_ocl_Device_endianLittle_const(self.as_raw_Device()) }.into_result() } pub fn error_correction_support(&self) -> Result<bool> { unsafe { sys::cv_ocl_Device_errorCorrectionSupport_const(self.as_raw_Device()) }.into_result() } pub fn execution_capabilities(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_executionCapabilities_const(self.as_raw_Device()) }.into_result() } pub fn global_mem_cache_size(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_globalMemCacheSize_const(self.as_raw_Device()) }.into_result() } pub fn global_mem_cache_type(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_globalMemCacheType_const(self.as_raw_Device()) }.into_result() } pub fn global_mem_cache_line_size(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_globalMemCacheLineSize_const(self.as_raw_Device()) }.into_result() } pub fn global_mem_size(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_globalMemSize_const(self.as_raw_Device()) }.into_result() } pub fn local_mem_size(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_localMemSize_const(self.as_raw_Device()) }.into_result() } pub fn local_mem_type(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_localMemType_const(self.as_raw_Device()) }.into_result() } pub fn host_unified_memory(&self) -> Result<bool> { unsafe { sys::cv_ocl_Device_hostUnifiedMemory_const(self.as_raw_Device()) }.into_result() } pub fn image_support(&self) -> Result<bool> { unsafe { sys::cv_ocl_Device_imageSupport_const(self.as_raw_Device()) }.into_result() } pub fn image_from_buffer_support(&self) -> Result<bool> { unsafe { sys::cv_ocl_Device_imageFromBufferSupport_const(self.as_raw_Device()) }.into_result() } pub fn image_pitch_alignment(&self) -> Result<u32> { unsafe { sys::cv_ocl_Device_imagePitchAlignment_const(self.as_raw_Device()) }.into_result() } pub fn image_base_address_alignment(&self) -> Result<u32> { unsafe { sys::cv_ocl_Device_imageBaseAddressAlignment_const(self.as_raw_Device()) }.into_result() } pub fn intel_subgroups_support(&self) -> Result<bool> { unsafe { sys::cv_ocl_Device_intelSubgroupsSupport_const(self.as_raw_Device()) }.into_result() } pub fn image2_d_max_width(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_image2DMaxWidth_const(self.as_raw_Device()) }.into_result() } pub fn image2_d_max_height(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_image2DMaxHeight_const(self.as_raw_Device()) }.into_result() } pub fn image3_d_max_width(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_image3DMaxWidth_const(self.as_raw_Device()) }.into_result() } pub fn image3_d_max_height(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_image3DMaxHeight_const(self.as_raw_Device()) }.into_result() } pub fn image3_d_max_depth(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_image3DMaxDepth_const(self.as_raw_Device()) }.into_result() } pub fn image_max_buffer_size(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_imageMaxBufferSize_const(self.as_raw_Device()) }.into_result() } pub fn image_max_array_size(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_imageMaxArraySize_const(self.as_raw_Device()) }.into_result() } pub fn vendor_id(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_vendorID_const(self.as_raw_Device()) }.into_result() } pub fn is_amd(&self) -> Result<bool> { unsafe { sys::cv_ocl_Device_isAMD_const(self.as_raw_Device()) }.into_result() } pub fn is_intel(&self) -> Result<bool> { unsafe { sys::cv_ocl_Device_isIntel_const(self.as_raw_Device()) }.into_result() } pub fn is_n_vidia(&self) -> Result<bool> { unsafe { sys::cv_ocl_Device_isNVidia_const(self.as_raw_Device()) }.into_result() } pub fn max_clock_frequency(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_maxClockFrequency_const(self.as_raw_Device()) }.into_result() } pub fn max_compute_units(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_maxComputeUnits_const(self.as_raw_Device()) }.into_result() } pub fn max_constant_args(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_maxConstantArgs_const(self.as_raw_Device()) }.into_result() } pub fn max_constant_buffer_size(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_maxConstantBufferSize_const(self.as_raw_Device()) }.into_result() } pub fn max_mem_alloc_size(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_maxMemAllocSize_const(self.as_raw_Device()) }.into_result() } pub fn max_parameter_size(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_maxParameterSize_const(self.as_raw_Device()) }.into_result() } pub fn max_read_image_args(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_maxReadImageArgs_const(self.as_raw_Device()) }.into_result() } pub fn max_write_image_args(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_maxWriteImageArgs_const(self.as_raw_Device()) }.into_result() } pub fn max_samplers(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_maxSamplers_const(self.as_raw_Device()) }.into_result() } pub fn max_work_group_size(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_maxWorkGroupSize_const(self.as_raw_Device()) }.into_result() } pub fn max_work_item_dims(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_maxWorkItemDims_const(self.as_raw_Device()) }.into_result() } pub fn max_work_item_sizes(&self, unnamed_arg: &mut size_t) -> Result<()> { unsafe { sys::cv_ocl_Device_maxWorkItemSizes_const_size_t_X(self.as_raw_Device(), unnamed_arg) }.into_result() } pub fn mem_base_addr_align(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_memBaseAddrAlign_const(self.as_raw_Device()) }.into_result() } pub fn native_vector_width_char(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_nativeVectorWidthChar_const(self.as_raw_Device()) }.into_result() } pub fn native_vector_width_short(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_nativeVectorWidthShort_const(self.as_raw_Device()) }.into_result() } pub fn native_vector_width_int(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_nativeVectorWidthInt_const(self.as_raw_Device()) }.into_result() } pub fn native_vector_width_long(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_nativeVectorWidthLong_const(self.as_raw_Device()) }.into_result() } pub fn native_vector_width_float(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_nativeVectorWidthFloat_const(self.as_raw_Device()) }.into_result() } pub fn native_vector_width_double(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_nativeVectorWidthDouble_const(self.as_raw_Device()) }.into_result() } pub fn native_vector_width_half(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_nativeVectorWidthHalf_const(self.as_raw_Device()) }.into_result() } pub fn preferred_vector_width_char(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_preferredVectorWidthChar_const(self.as_raw_Device()) }.into_result() } pub fn preferred_vector_width_short(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_preferredVectorWidthShort_const(self.as_raw_Device()) }.into_result() } pub fn preferred_vector_width_int(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_preferredVectorWidthInt_const(self.as_raw_Device()) }.into_result() } pub fn preferred_vector_width_long(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_preferredVectorWidthLong_const(self.as_raw_Device()) }.into_result() } pub fn preferred_vector_width_float(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_preferredVectorWidthFloat_const(self.as_raw_Device()) }.into_result() } pub fn preferred_vector_width_double(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_preferredVectorWidthDouble_const(self.as_raw_Device()) }.into_result() } pub fn preferred_vector_width_half(&self) -> Result<i32> { unsafe { sys::cv_ocl_Device_preferredVectorWidthHalf_const(self.as_raw_Device()) }.into_result() } pub fn printf_buffer_size(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_printfBufferSize_const(self.as_raw_Device()) }.into_result() } pub fn profiling_timer_resolution(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Device_profilingTimerResolution_const(self.as_raw_Device()) }.into_result() } pub fn get_default() -> Result<core::Device> { unsafe { sys::cv_ocl_Device_getDefault() }.into_result().map(|ptr| core::Device { ptr }) } } // boxed class cv::ocl::Image2D pub struct Image2D { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Image2D { fn drop(&mut self) { unsafe { sys::cv_Image2D_delete(self.ptr) }; } } impl Image2D { #[inline(always)] pub fn as_raw_Image2D(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Image2D {} impl Image2D { pub fn default() -> Result<core::Image2D> { unsafe { sys::cv_ocl_Image2D_Image2D() }.into_result().map(|ptr| core::Image2D { ptr }) } /// ## Parameters /// * src: UMat object from which to get image properties and data /// * norm: flag to enable the use of normalized channel data types /// * alias: flag indicating that the image should alias the src UMat. If true, changes to the /// image or src will be reflected in both objects. /// /// ## C++ default parameters /// * norm: false /// * alias: false pub fn new(src: &core::UMat, norm: bool, alias: bool) -> Result<core::Image2D> { unsafe { sys::cv_ocl_Image2D_Image2D_UMat_bool_bool(src.as_raw_UMat(), norm, alias) }.into_result().map(|ptr| core::Image2D { ptr }) } pub fn copy(i: &core::Image2D) -> Result<core::Image2D> { unsafe { sys::cv_ocl_Image2D_Image2D_Image2D(i.as_raw_Image2D()) }.into_result().map(|ptr| core::Image2D { ptr }) } /// Indicates if creating an aliased image should succeed. /// Depends on the underlying platform and the dimensions of the UMat. pub fn can_create_alias(u: &core::UMat) -> Result<bool> { unsafe { sys::cv_ocl_Image2D_canCreateAlias_UMat(u.as_raw_UMat()) }.into_result() } /// Indicates if the image format is supported. pub fn is_format_supported(depth: i32, cn: i32, norm: bool) -> Result<bool> { unsafe { sys::cv_ocl_Image2D_isFormatSupported_int_int_bool(depth, cn, norm) }.into_result() } pub fn ptr(&self) -> Result<&mut c_void> { unsafe { sys::cv_ocl_Image2D_ptr_const(self.as_raw_Image2D()) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } } // boxed class cv::ocl::Kernel pub struct Kernel { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Kernel { fn drop(&mut self) { unsafe { sys::cv_Kernel_delete(self.ptr) }; } } impl Kernel { #[inline(always)] pub fn as_raw_Kernel(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Kernel {} impl Kernel { pub fn default() -> Result<core::Kernel> { unsafe { sys::cv_ocl_Kernel_Kernel() }.into_result().map(|ptr| core::Kernel { ptr }) } pub fn copy(k: &core::Kernel) -> Result<core::Kernel> { unsafe { sys::cv_ocl_Kernel_Kernel_Kernel(k.as_raw_Kernel()) }.into_result().map(|ptr| core::Kernel { ptr }) } pub fn empty(&self) -> Result<bool> { unsafe { sys::cv_ocl_Kernel_empty_const(self.as_raw_Kernel()) }.into_result() } pub fn set(&mut self, i: i32, value: &c_void, sz: size_t) -> Result<i32> { unsafe { sys::cv_ocl_Kernel_set_int_const_void_X_size_t(self.as_raw_Kernel(), i, value, sz) }.into_result() } pub fn set_umat(&mut self, i: i32, m: &core::UMat) -> Result<i32> { unsafe { sys::cv_ocl_Kernel_set_int_UMat(self.as_raw_Kernel(), i, m.as_raw_UMat()) }.into_result() } pub fn set_kernel_arg(&mut self, i: i32, arg: &core::KernelArg) -> Result<i32> { unsafe { sys::cv_ocl_Kernel_set_int_KernelArg(self.as_raw_Kernel(), i, arg.as_raw_KernelArg()) }.into_result() } /// Run the OpenCL kernel. /// ## Parameters /// * dims: the work problem dimensions. It is the length of globalsize and localsize. It can be either 1, 2 or 3. /// * globalsize: work items for each dimension. It is not the final globalsize passed to /// OpenCL. Each dimension will be adjusted to the nearest integer divisible by the corresponding /// value in localsize. If localsize is NULL, it will still be adjusted depending on dims. The /// adjusted values are greater than or equal to the original values. /// * localsize: work-group size for each dimension. /// * sync: specify whether to wait for OpenCL computation to finish before return. /// * q: command queue /// /// ## C++ default parameters /// * q: Queue() pub fn run(&mut self, dims: i32, globalsize: &mut [size_t], localsize: &mut [size_t], sync: bool, q: &core::Queue) -> Result<bool> { unsafe { sys::cv_ocl_Kernel_run_int_size_t_X_size_t_X_bool_Queue(self.as_raw_Kernel(), dims, globalsize.as_mut_ptr(), localsize.as_mut_ptr(), sync, q.as_raw_Queue()) }.into_result() } /// /// ## C++ default parameters /// * q: Queue() pub fn run_task(&mut self, sync: bool, q: &core::Queue) -> Result<bool> { unsafe { sys::cv_ocl_Kernel_runTask_bool_Queue(self.as_raw_Kernel(), sync, q.as_raw_Queue()) }.into_result() } /// Similar to synchronized run() call with returning of kernel execution time /// Separate OpenCL command queue may be used (with CL_QUEUE_PROFILING_ENABLE) /// ## Returns /// Execution time in nanoseconds or negative number on error /// /// ## C++ default parameters /// * q: Queue() pub fn run_profiling(&mut self, dims: i32, globalsize: &mut [size_t], localsize: &mut [size_t], q: &core::Queue) -> Result<i64> { unsafe { sys::cv_ocl_Kernel_runProfiling_int_size_t_X_size_t_X_Queue(self.as_raw_Kernel(), dims, globalsize.as_mut_ptr(), localsize.as_mut_ptr(), q.as_raw_Queue()) }.into_result() } pub fn work_group_size(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Kernel_workGroupSize_const(self.as_raw_Kernel()) }.into_result() } pub fn prefered_work_group_size_multiple(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Kernel_preferedWorkGroupSizeMultiple_const(self.as_raw_Kernel()) }.into_result() } pub fn compile_work_group_size(&self, wsz: &mut [size_t]) -> Result<bool> { unsafe { sys::cv_ocl_Kernel_compileWorkGroupSize_const_size_t_X(self.as_raw_Kernel(), wsz.as_mut_ptr()) }.into_result() } pub fn local_mem_size(&self) -> Result<size_t> { unsafe { sys::cv_ocl_Kernel_localMemSize_const(self.as_raw_Kernel()) }.into_result() } pub fn ptr(&self) -> Result<&mut c_void> { unsafe { sys::cv_ocl_Kernel_ptr_const(self.as_raw_Kernel()) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } } // boxed class cv::ocl::KernelArg pub struct KernelArg { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for KernelArg { fn drop(&mut self) { unsafe { sys::cv_KernelArg_delete(self.ptr) }; } } impl KernelArg { #[inline(always)] pub fn as_raw_KernelArg(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for KernelArg {} impl KernelArg { /// /// ## C++ default parameters /// * wscale: 1 /// * iwscale: 1 /// * _obj: 0 /// * _sz: 0 pub fn new(_flags: i32, _m: &mut core::UMat, wscale: i32, iwscale: i32, _obj: &c_void, _sz: size_t) -> Result<core::KernelArg> { unsafe { sys::cv_ocl_KernelArg_KernelArg_int_UMat_int_int_const_void_X_size_t(_flags, _m.as_raw_UMat(), wscale, iwscale, _obj, _sz) }.into_result().map(|ptr| core::KernelArg { ptr }) } pub fn default() -> Result<core::KernelArg> { unsafe { sys::cv_ocl_KernelArg_KernelArg() }.into_result().map(|ptr| core::KernelArg { ptr }) } pub fn local(local_mem_size: size_t) -> Result<core::KernelArg> { unsafe { sys::cv_ocl_KernelArg_Local_size_t(local_mem_size) }.into_result().map(|ptr| core::KernelArg { ptr }) } pub fn ptr_write_only(m: &core::UMat) -> Result<core::KernelArg> { unsafe { sys::cv_ocl_KernelArg_PtrWriteOnly_UMat(m.as_raw_UMat()) }.into_result().map(|ptr| core::KernelArg { ptr }) } pub fn ptr_read_only(m: &core::UMat) -> Result<core::KernelArg> { unsafe { sys::cv_ocl_KernelArg_PtrReadOnly_UMat(m.as_raw_UMat()) }.into_result().map(|ptr| core::KernelArg { ptr }) } pub fn ptr_read_write(m: &core::UMat) -> Result<core::KernelArg> { unsafe { sys::cv_ocl_KernelArg_PtrReadWrite_UMat(m.as_raw_UMat()) }.into_result().map(|ptr| core::KernelArg { ptr }) } /// /// ## C++ default parameters /// * wscale: 1 /// * iwscale: 1 pub fn read_write(m: &core::UMat, wscale: i32, iwscale: i32) -> Result<core::KernelArg> { unsafe { sys::cv_ocl_KernelArg_ReadWrite_UMat_int_int(m.as_raw_UMat(), wscale, iwscale) }.into_result().map(|ptr| core::KernelArg { ptr }) } /// /// ## C++ default parameters /// * wscale: 1 /// * iwscale: 1 pub fn read_write_no_size(m: &core::UMat, wscale: i32, iwscale: i32) -> Result<core::KernelArg> { unsafe { sys::cv_ocl_KernelArg_ReadWriteNoSize_UMat_int_int(m.as_raw_UMat(), wscale, iwscale) }.into_result().map(|ptr| core::KernelArg { ptr }) } /// /// ## C++ default parameters /// * wscale: 1 /// * iwscale: 1 pub fn read_only(m: &core::UMat, wscale: i32, iwscale: i32) -> Result<core::KernelArg> { unsafe { sys::cv_ocl_KernelArg_ReadOnly_UMat_int_int(m.as_raw_UMat(), wscale, iwscale) }.into_result().map(|ptr| core::KernelArg { ptr }) } /// /// ## C++ default parameters /// * wscale: 1 /// * iwscale: 1 pub fn write_only(m: &core::UMat, wscale: i32, iwscale: i32) -> Result<core::KernelArg> { unsafe { sys::cv_ocl_KernelArg_WriteOnly_UMat_int_int(m.as_raw_UMat(), wscale, iwscale) }.into_result().map(|ptr| core::KernelArg { ptr }) } /// /// ## C++ default parameters /// * wscale: 1 /// * iwscale: 1 pub fn read_only_no_size(m: &core::UMat, wscale: i32, iwscale: i32) -> Result<core::KernelArg> { unsafe { sys::cv_ocl_KernelArg_ReadOnlyNoSize_UMat_int_int(m.as_raw_UMat(), wscale, iwscale) }.into_result().map(|ptr| core::KernelArg { ptr }) } /// /// ## C++ default parameters /// * wscale: 1 /// * iwscale: 1 pub fn write_only_no_size(m: &core::UMat, wscale: i32, iwscale: i32) -> Result<core::KernelArg> { unsafe { sys::cv_ocl_KernelArg_WriteOnlyNoSize_UMat_int_int(m.as_raw_UMat(), wscale, iwscale) }.into_result().map(|ptr| core::KernelArg { ptr }) } pub fn constant(m: &core::Mat) -> Result<core::KernelArg> { unsafe { sys::cv_ocl_KernelArg_Constant_Mat(m.as_raw_Mat()) }.into_result().map(|ptr| core::KernelArg { ptr }) } } // boxed class cv::ocl::Platform pub struct Platform { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Platform { fn drop(&mut self) { unsafe { sys::cv_Platform_delete(self.ptr) }; } } impl Platform { #[inline(always)] pub fn as_raw_Platform(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Platform {} impl Platform { pub fn default() -> Result<core::Platform> { unsafe { sys::cv_ocl_Platform_Platform() }.into_result().map(|ptr| core::Platform { ptr }) } pub fn copy(p: &core::Platform) -> Result<core::Platform> { unsafe { sys::cv_ocl_Platform_Platform_Platform(p.as_raw_Platform()) }.into_result().map(|ptr| core::Platform { ptr }) } pub fn ptr(&self) -> Result<&mut c_void> { unsafe { sys::cv_ocl_Platform_ptr_const(self.as_raw_Platform()) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } pub fn get_default() -> Result<core::Platform> { unsafe { sys::cv_ocl_Platform_getDefault() }.into_result().map(|ptr| core::Platform { ptr }) } } // boxed class cv::ocl::PlatformInfo pub struct PlatformInfo { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for PlatformInfo { fn drop(&mut self) { unsafe { sys::cv_PlatformInfo_delete(self.ptr) }; } } impl PlatformInfo { #[inline(always)] pub fn as_raw_PlatformInfo(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for PlatformInfo {} impl PlatformInfo { pub fn default() -> Result<core::PlatformInfo> { unsafe { sys::cv_ocl_PlatformInfo_PlatformInfo() }.into_result().map(|ptr| core::PlatformInfo { ptr }) } pub fn new(id: &mut c_void) -> Result<core::PlatformInfo> { unsafe { sys::cv_ocl_PlatformInfo_PlatformInfo_void_X(id) }.into_result().map(|ptr| core::PlatformInfo { ptr }) } pub fn copy(i: &core::PlatformInfo) -> Result<core::PlatformInfo> { unsafe { sys::cv_ocl_PlatformInfo_PlatformInfo_PlatformInfo(i.as_raw_PlatformInfo()) }.into_result().map(|ptr| core::PlatformInfo { ptr }) } pub fn name(&self) -> Result<String> { unsafe { sys::cv_ocl_PlatformInfo_name_const(self.as_raw_PlatformInfo()) }.into_result().map(crate::templ::receive_string_mut) } pub fn vendor(&self) -> Result<String> { unsafe { sys::cv_ocl_PlatformInfo_vendor_const(self.as_raw_PlatformInfo()) }.into_result().map(crate::templ::receive_string_mut) } pub fn version(&self) -> Result<String> { unsafe { sys::cv_ocl_PlatformInfo_version_const(self.as_raw_PlatformInfo()) }.into_result().map(crate::templ::receive_string_mut) } pub fn device_number(&self) -> Result<i32> { unsafe { sys::cv_ocl_PlatformInfo_deviceNumber_const(self.as_raw_PlatformInfo()) }.into_result() } pub fn get_device(&self, device: &mut core::Device, d: i32) -> Result<()> { unsafe { sys::cv_ocl_PlatformInfo_getDevice_const_Device_int(self.as_raw_PlatformInfo(), device.as_raw_Device(), d) }.into_result() } } // boxed class cv::ocl::Program pub struct Program { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Program { fn drop(&mut self) { unsafe { sys::cv_Program_delete(self.ptr) }; } } impl Program { #[inline(always)] pub fn as_raw_Program(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Program {} impl Program { pub fn ptr(&self) -> Result<&mut c_void> { unsafe { sys::cv_ocl_Program_ptr_const(self.as_raw_Program()) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } /// Query device-specific program binary. /// /// Returns RAW OpenCL executable binary without additional attachments. /// /// ## See also /// ProgramSource::fromBinary /// /// ## Parameters /// * binary: [out] output buffer pub fn get_binary(&self, binary: &mut types::VectorOfchar) -> Result<()> { unsafe { sys::cv_ocl_Program_getBinary_const_VectorOfchar(self.as_raw_Program(), binary.as_raw_VectorOfchar()) }.into_result() } pub fn read(&mut self, buf: &str, buildflags: &str) -> Result<bool> { string_arg!(buf); string_arg!(buildflags); unsafe { sys::cv_ocl_Program_read_String_String(self.as_raw_Program(), buf.as_ptr(), buildflags.as_ptr()) }.into_result() } pub fn write(&self, buf: &mut String) -> Result<bool> { string_arg_output_send!(via buf_via); let out = unsafe { sys::cv_ocl_Program_write_const_String(self.as_raw_Program(), &mut buf_via) }.into_result(); string_arg_output_receive!(buf_via => buf); return out; } pub fn get_prefix(&self) -> Result<String> { unsafe { sys::cv_ocl_Program_getPrefix_const(self.as_raw_Program()) }.into_result().map(crate::templ::receive_string_mut) } pub fn get_prefix_build_flags(buildflags: &str) -> Result<String> { string_arg!(buildflags); unsafe { sys::cv_ocl_Program_getPrefix_String(buildflags.as_ptr()) }.into_result().map(crate::templ::receive_string_mut) } } // boxed class cv::ocl::ProgramSource pub struct ProgramSource { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for ProgramSource { fn drop(&mut self) { unsafe { sys::cv_ProgramSource_delete(self.ptr) }; } } impl ProgramSource { #[inline(always)] pub fn as_raw_ProgramSource(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for ProgramSource {} impl ProgramSource { pub fn default() -> Result<core::ProgramSource> { unsafe { sys::cv_ocl_ProgramSource_ProgramSource() }.into_result().map(|ptr| core::ProgramSource { ptr }) } pub fn new(module: &str, name: &str, code_str: &str, code_hash: &str) -> Result<core::ProgramSource> { string_arg!(module); string_arg!(name); string_arg!(code_str); string_arg!(code_hash); unsafe { sys::cv_ocl_ProgramSource_ProgramSource_String_String_String_String(module.as_ptr(), name.as_ptr(), code_str.as_ptr(), code_hash.as_ptr()) }.into_result().map(|ptr| core::ProgramSource { ptr }) } pub fn from_str(prog: &str) -> Result<core::ProgramSource> { string_arg!(prog); unsafe { sys::cv_ocl_ProgramSource_ProgramSource_String(prog.as_ptr()) }.into_result().map(|ptr| core::ProgramSource { ptr }) } pub fn source(&self) -> Result<String> { unsafe { sys::cv_ocl_ProgramSource_source_const(self.as_raw_ProgramSource()) }.into_result().map(crate::templ::receive_string) } pub fn hash(&self) -> Result<u64> { unsafe { sys::cv_ocl_ProgramSource_hash_const(self.as_raw_ProgramSource()) }.into_result() } /// Describe OpenCL program binary. /// Do not call clCreateProgramWithBinary() and/or clBuildProgram(). /// /// Caller should guarantee binary buffer lifetime greater than ProgramSource object (and any of its copies). /// /// This kind of binary is not portable between platforms in general - it is specific to OpenCL vendor / device / driver version. /// /// ## Parameters /// * module: name of program owner module /// * name: unique name of program (module+name is used as key for OpenCL program caching) /// * binary: buffer address. See buffer lifetime requirement in description. /// * size: buffer size /// * buildOptions: additional program-related build options passed to clBuildProgram() /// ## Returns /// created ProgramSource object /// /// ## C++ default parameters /// * build_options: cv::String() pub fn from_binary(module: &str, name: &str, binary: &u8, size: size_t, build_options: &str) -> Result<core::ProgramSource> { string_arg!(module); string_arg!(name); string_arg!(build_options); unsafe { sys::cv_ocl_ProgramSource_fromBinary_String_String_const_unsigned_char_X_size_t_String(module.as_ptr(), name.as_ptr(), binary, size, build_options.as_ptr()) }.into_result().map(|ptr| core::ProgramSource { ptr }) } /// Describe OpenCL program in SPIR format. /// Do not call clCreateProgramWithBinary() and/or clBuildProgram(). /// /// Supports SPIR 1.2 by default (pass '-spir-std=X.Y' in buildOptions to override this behavior) /// /// Caller should guarantee binary buffer lifetime greater than ProgramSource object (and any of its copies). /// /// Programs in this format are portable between OpenCL implementations with 'khr_spir' extension: /// https://www.khronos.org/registry/OpenCL/sdk/2.0/docs/man/xhtml/cl_khr_spir.html /// (but they are not portable between different platforms: 32-bit / 64-bit) /// /// Note: these programs can't support vendor specific extensions, like 'cl_intel_subgroups'. /// /// ## Parameters /// * module: name of program owner module /// * name: unique name of program (module+name is used as key for OpenCL program caching) /// * binary: buffer address. See buffer lifetime requirement in description. /// * size: buffer size /// * buildOptions: additional program-related build options passed to clBuildProgram() /// (these options are added automatically: '-x spir' and '-spir-std=1.2') /// ## Returns /// created ProgramSource object. /// /// ## C++ default parameters /// * build_options: cv::String() pub fn from_spir(module: &str, name: &str, binary: &u8, size: size_t, build_options: &str) -> Result<core::ProgramSource> { string_arg!(module); string_arg!(name); string_arg!(build_options); unsafe { sys::cv_ocl_ProgramSource_fromSPIR_String_String_const_unsigned_char_X_size_t_String(module.as_ptr(), name.as_ptr(), binary, size, build_options.as_ptr()) }.into_result().map(|ptr| core::ProgramSource { ptr }) } } // boxed class cv::ocl::Queue pub struct Queue { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Queue { fn drop(&mut self) { unsafe { sys::cv_Queue_delete(self.ptr) }; } } impl Queue { #[inline(always)] pub fn as_raw_Queue(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Queue {} impl Queue { pub fn default() -> Result<core::Queue> { unsafe { sys::cv_ocl_Queue_Queue() }.into_result().map(|ptr| core::Queue { ptr }) } /// /// ## C++ default parameters /// * d: Device() pub fn new(c: &core::Context, d: &core::Device) -> Result<core::Queue> { unsafe { sys::cv_ocl_Queue_Queue_Context_Device(c.as_raw_Context(), d.as_raw_Device()) }.into_result().map(|ptr| core::Queue { ptr }) } pub fn copy(q: &core::Queue) -> Result<core::Queue> { unsafe { sys::cv_ocl_Queue_Queue_Queue(q.as_raw_Queue()) }.into_result().map(|ptr| core::Queue { ptr }) } /// /// ## C++ default parameters /// * c: Context() /// * d: Device() pub fn create(&mut self, c: &core::Context, d: &core::Device) -> Result<bool> { unsafe { sys::cv_ocl_Queue_create_Context_Device(self.as_raw_Queue(), c.as_raw_Context(), d.as_raw_Device()) }.into_result() } pub fn finish(&mut self) -> Result<()> { unsafe { sys::cv_ocl_Queue_finish(self.as_raw_Queue()) }.into_result() } pub fn ptr(&self) -> Result<&mut c_void> { unsafe { sys::cv_ocl_Queue_ptr_const(self.as_raw_Queue()) }.into_result().and_then(|x| unsafe { x.as_mut() }.ok_or_else(|| Error::new(core::StsNullPtr, format!("Function returned Null pointer")))) } pub fn get_default() -> Result<core::Queue> { unsafe { sys::cv_ocl_Queue_getDefault() }.into_result().map(|ptr| core::Queue { ptr }) } pub fn get_profiling_queue(&self) -> Result<core::Queue> { unsafe { sys::cv_ocl_Queue_getProfilingQueue_const(self.as_raw_Queue()) }.into_result().map(|ptr| core::Queue { ptr }) } } // boxed class cv::ocl::Timer pub struct Timer { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for Timer { fn drop(&mut self) { unsafe { sys::cv_Timer_delete(self.ptr) }; } } impl Timer { #[inline(always)] pub fn as_raw_Timer(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for Timer {} impl Timer { pub fn new(q: &core::Queue) -> Result<core::Timer> { unsafe { sys::cv_ocl_Timer_Timer_Queue(q.as_raw_Queue()) }.into_result().map(|ptr| core::Timer { ptr }) } pub fn start(&mut self) -> Result<()> { unsafe { sys::cv_ocl_Timer_start(self.as_raw_Timer()) }.into_result() } pub fn stop(&mut self) -> Result<()> { unsafe { sys::cv_ocl_Timer_stop(self.as_raw_Timer()) }.into_result() } pub fn duration_ns(&self) -> Result<u64> { unsafe { sys::cv_ocl_Timer_durationNS_const(self.as_raw_Timer()) }.into_result() } } // boxed class cv::ocl::internal::ProgramEntry pub struct ProgramEntry { #[doc(hidden)] pub(crate) ptr: *mut c_void } impl Drop for ProgramEntry { fn drop(&mut self) { unsafe { sys::cv_ProgramEntry_delete(self.ptr) }; } } impl ProgramEntry { #[inline(always)] pub fn as_raw_ProgramEntry(&self) -> *mut c_void { self.ptr } pub unsafe fn from_raw_ptr(ptr: *mut c_void) -> Self { Self { ptr } } } unsafe impl Send for ProgramEntry {} // Generating impl for trait core::AllocatorStatisticsInterface pub trait AllocatorStatisticsInterface { #[inline(always)] fn as_raw_AllocatorStatisticsInterface(&self) -> *mut c_void; fn get_current_usage(&self) -> Result<u64> { unsafe { sys::cv_utils_AllocatorStatisticsInterface_getCurrentUsage_const(self.as_raw_AllocatorStatisticsInterface()) }.into_result() } fn get_total_usage(&self) -> Result<u64> { unsafe { sys::cv_utils_AllocatorStatisticsInterface_getTotalUsage_const(self.as_raw_AllocatorStatisticsInterface()) }.into_result() } fn get_number_of_allocations(&self) -> Result<u64> { unsafe { sys::cv_utils_AllocatorStatisticsInterface_getNumberOfAllocations_const(self.as_raw_AllocatorStatisticsInterface()) }.into_result() } fn get_peak_usage(&self) -> Result<u64> { unsafe { sys::cv_utils_AllocatorStatisticsInterface_getPeakUsage_const(self.as_raw_AllocatorStatisticsInterface()) }.into_result() } /// set peak usage = current usage fn reset_peak_usage(&mut self) -> Result<()> { unsafe { sys::cv_utils_AllocatorStatisticsInterface_resetPeakUsage(self.as_raw_AllocatorStatisticsInterface()) }.into_result() } } pub const CV_16SC1: i32 = 0x3; // 3 pub const CV_16SC2: i32 = 0xb; // 11 pub const CV_16SC3: i32 = 0x13; // 19 pub const CV_16SC4: i32 = 0x1b; // 27 pub const CV_16UC1: i32 = 0x2; // 2 pub const CV_16UC2: i32 = 0xa; // 10 pub const CV_16UC3: i32 = 0x12; // 18 pub const CV_16UC4: i32 = 0x1a; // 26 pub const CV_32FC1: i32 = 0x5; // 5 pub const CV_32FC2: i32 = 0xd; // 13 pub const CV_32FC3: i32 = 0x15; // 21 pub const CV_32FC4: i32 = 0x1d; // 29 pub const CV_32SC1: i32 = 0x4; // 4 pub const CV_32SC2: i32 = 0xc; // 12 pub const CV_32SC3: i32 = 0x14; // 20 pub const CV_32SC4: i32 = 0x1c; // 28 pub const CV_64FC1: i32 = 0x6; // 6 pub const CV_64FC2: i32 = 0xe; // 14 pub const CV_64FC3: i32 = 0x16; // 22 pub const CV_64FC4: i32 = 0x1e; // 30 pub const CV_8SC1: i32 = 0x1; // 1 pub const CV_8SC2: i32 = 0x9; // 9 pub const CV_8SC3: i32 = 0x11; // 17 pub const CV_8SC4: i32 = 0x19; // 25 pub const CV_8UC1: i32 = 0x0; // 0 pub const CV_8UC2: i32 = 0x8; // 8 pub const CV_8UC3: i32 = 0x10; // 16 pub const CV_8UC4: i32 = 0x18; // 24 pub const CV_DEPTH_MAX: i32 = 0x8; // 8 pub const CV_MAT_CN_MASK: i32 = 0xff8; // 4088 pub const CV_MAT_CONT_FLAG: i32 = 0x4000; // 16384 pub const CV_MAT_DEPTH_MASK: i32 = 0x7; // 7 pub const CV_MAT_TYPE_MASK: i32 = 0xfff; // 4095 pub const CV_SUBMAT_FLAG: i32 = 0x8000; // 32768 pub static CV_VERSION: &'static str = "3.4.8"; pub const Device_TYPE_DGPU: i32 = 0x10004; // 65540 pub const Device_TYPE_IGPU: i32 = 0x20004; // 131076 pub const FileStorage_WRITE_BASE64: i32 = 0x41; // 65 pub const Mat_CONTINUOUS_FLAG: i32 = 0x4000; // 16384 pub const Mat_SUBMATRIX_FLAG: i32 = 0x8000; // 32768 pub const _InputArray_CUDA_GPU_MAT: i32 = 0x90000; // 589824 pub const _InputArray_CUDA_HOST_MEM: i32 = 0x80000; // 524288 pub const _InputArray_EXPR: i32 = 0x60000; // 393216 pub const _InputArray_FIXED_SIZE: i32 = 0x40000000; // 1073741824 pub const _InputArray_FIXED_TYPE: i32 = 0x80000000; // -2147483648 pub const _InputArray_KIND_MASK: i32 = 0x1f0000; // 2031616 pub const _InputArray_MAT: i32 = 0x10000; // 65536 pub const _InputArray_MATX: i32 = 0x20000; // 131072 pub const _InputArray_NONE: i32 = 0x0; // 0 pub const _InputArray_OPENGL_BUFFER: i32 = 0x70000; // 458752 pub const _InputArray_STD_ARRAY: i32 = 0xe0000; // 917504 pub const _InputArray_STD_ARRAY_MAT: i32 = 0xf0000; // 983040 pub const _InputArray_STD_BOOL_VECTOR: i32 = 0xc0000; // 786432 pub const _InputArray_STD_VECTOR: i32 = 0x30000; // 196608 pub const _InputArray_STD_VECTOR_CUDA_GPU_MAT: i32 = 0xd0000; // 851968 pub const _InputArray_STD_VECTOR_MAT: i32 = 0x50000; // 327680 pub const _InputArray_STD_VECTOR_UMAT: i32 = 0xb0000; // 720896 pub const _InputArray_STD_VECTOR_VECTOR: i32 = 0x40000; // 262144 pub const _InputArray_UMAT: i32 = 0xa0000; // 655360 pub const _OutputArray_DEPTH_MASK_16S: i32 = 0x8; // 8 pub const _OutputArray_DEPTH_MASK_16U: i32 = 0x4; // 4 pub const _OutputArray_DEPTH_MASK_32F: i32 = 0x20; // 32 pub const _OutputArray_DEPTH_MASK_32S: i32 = 0x10; // 16 pub const _OutputArray_DEPTH_MASK_64F: i32 = 0x40; // 64 pub const _OutputArray_DEPTH_MASK_8S: i32 = 0x2; // 2 pub const _OutputArray_DEPTH_MASK_8U: i32 = 0x1; // 1 pub const _OutputArray_DEPTH_MASK_ALL: i32 = 0x7f; // 127 pub const _OutputArray_DEPTH_MASK_ALL_BUT_8S: i32 = 0x7d; // 125 pub const _OutputArray_DEPTH_MASK_FLT: i32 = 0x60; // 96 pub use crate::manual::core::*;