Module opencv::stitching [−][src]
Expand description
Images stitching
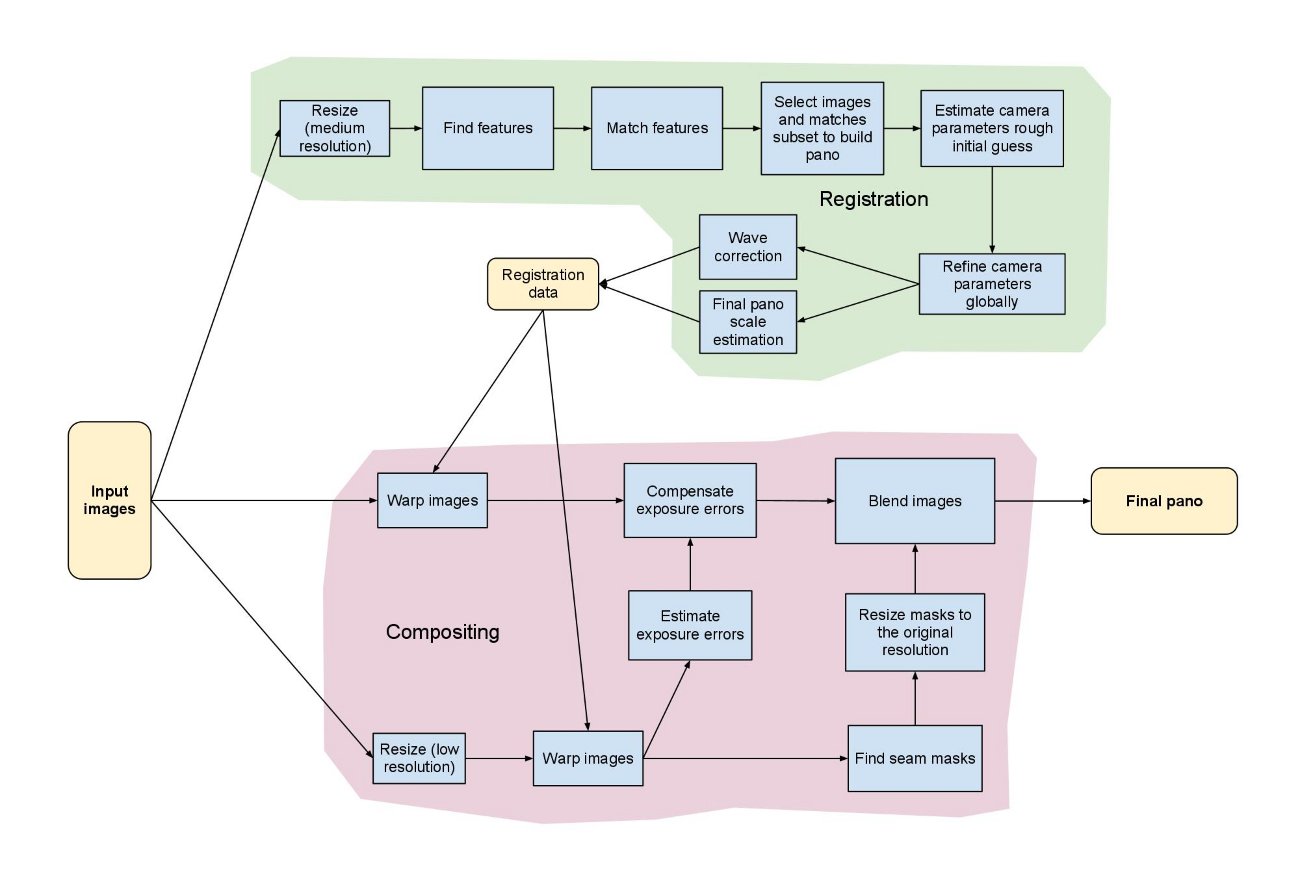
This figure illustrates the stitching module pipeline implemented in the Stitcher class. Using that class it’s possible to configure/remove some steps, i.e. adjust the stitching pipeline according to the particular needs. All building blocks from the pipeline are available in the detail namespace, one can combine and use them separately.
The implemented stitching pipeline is very similar to the one proposed in BL07 .
Camera models
There are currently 2 camera models implemented in stitching pipeline.
- Homography model expecting perspective transformations between images implemented in @ref cv::detail::BestOf2NearestMatcher cv::detail::HomographyBasedEstimator cv::detail::BundleAdjusterReproj cv::detail::BundleAdjusterRay
- Affine model expecting affine transformation with 6 DOF or 4 DOF implemented in @ref cv::detail::AffineBestOf2NearestMatcher cv::detail::AffineBasedEstimator cv::detail::BundleAdjusterAffine cv::detail::BundleAdjusterAffinePartial cv::AffineWarper
Homography model is useful for creating photo panoramas captured by camera, while affine-based model can be used to stitch scans and object captured by specialized devices. Use @ref cv::Stitcher::create to get preconfigured pipeline for one of those models.
Note: Certain detailed settings of @ref cv::Stitcher might not make sense. Especially you should not mix classes implementing affine model and classes implementing Homography model, as they work with different transformations.
Features Finding and Images Matching
Rotation Estimation
Autocalibration
Images Warping
Seam Estimation
Exposure Compensation
Image Blenders
Modules
Structs
Affine warper factory class.
Cylindrical warper factory class.
Affine transformation based estimator.
Features matcher similar to cv::detail::BestOf2NearestMatcher which finds two best matches for each feature and leaves the best one only if the ratio between descriptor distances is greater than the threshold match_conf.
Affine warper that uses rotations and translations
Features matcher which finds two best matches for each feature and leaves the best one only if the ratio between descriptor distances is greater than the threshold match_conf
Base class for all blenders.
Exposure compensator which tries to remove exposure related artifacts by adjusting image block on each channel.
Exposure compensator which tries to remove exposure related artifacts by adjusting image block intensities, see UES01 for details.
Bundle adjuster that expects affine transformation represented in homogeneous coordinates in R for each camera param. Implements camera parameters refinement algorithm which minimizes sum of the reprojection error squares
Bundle adjuster that expects affine transformation with 4 DOF represented in homogeneous coordinates in R for each camera param. Implements camera parameters refinement algorithm which minimizes sum of the reprojection error squares
Implementation of the camera parameters refinement algorithm which minimizes sum of the distances between the rays passing through the camera center and a feature. :
Implementation of the camera parameters refinement algorithm which minimizes sum of the reprojection error squares
Describes camera parameters.
Exposure compensator which tries to remove exposure related artifacts by adjusting image intensities on each channel independently.
Warper that maps an image onto the x*x + z*z = 1 cylinder.
Simple blender which mixes images at its borders.
Exposure compensator which tries to remove exposure related artifacts by adjusting image intensities, see BL07 and WJ10 for details.
Minimum graph cut-based seam estimator. See details in V03 .
Base class for all minimum graph-cut-based seam estimators.
Homography based rotation estimator.
Structure containing image keypoints and descriptors.
Structure containing information about matches between two images.
Blender which uses multi-band blending algorithm (see BA83).
Stub bundle adjuster that does nothing.
Stub exposure compensator which does nothing.
Stub seam estimator which does nothing.
Warper that maps an image onto the z = 1 plane.
Base class for warping logic implementation.
Warper that maps an image onto the unit sphere located at the origin.
Voronoi diagram-based seam estimator.
Plane warper factory class.
Spherical warper factory class
High level image stitcher.
Enums
Constants
Traits
Affine warper factory class.
Cylindrical warper factory class.
Affine transformation based estimator.
Features matcher similar to cv::detail::BestOf2NearestMatcher which finds two best matches for each feature and leaves the best one only if the ratio between descriptor distances is greater than the threshold match_conf.
Affine warper that uses rotations and translations
Features matcher which finds two best matches for each feature and leaves the best one only if the ratio between descriptor distances is greater than the threshold match_conf
Base class for all blenders.
Exposure compensator which tries to remove exposure related artifacts by adjusting image block on each channel.
Exposure compensator which tries to remove exposure related artifacts by adjusting image blocks.
Exposure compensator which tries to remove exposure related artifacts by adjusting image block intensities, see UES01 for details.
Bundle adjuster that expects affine transformation with 4 DOF represented in homogeneous coordinates in R for each camera param. Implements camera parameters refinement algorithm which minimizes sum of the reprojection error squares
Bundle adjuster that expects affine transformation represented in homogeneous coordinates in R for each camera param. Implements camera parameters refinement algorithm which minimizes sum of the reprojection error squares
Base class for all camera parameters refinement methods.
Implementation of the camera parameters refinement algorithm which minimizes sum of the distances between the rays passing through the camera center and a feature. :
Implementation of the camera parameters refinement algorithm which minimizes sum of the reprojection error squares
Describes camera parameters.
Exposure compensator which tries to remove exposure related artifacts by adjusting image intensities on each channel independently.
Warper that maps an image onto the x*x + z*z = 1 cylinder.
Rotation estimator base class.
Base class for all exposure compensators.
Simple blender which mixes images at its borders.
Feature matchers base class.
Exposure compensator which tries to remove exposure related artifacts by adjusting image intensities, see BL07 and WJ10 for details.
Base class for all minimum graph-cut-based seam estimators.
Minimum graph cut-based seam estimator. See details in V03 .
Homography based rotation estimator.
Structure containing image keypoints and descriptors.
Structure containing information about matches between two images.
Blender which uses multi-band blending algorithm (see BA83).
Stub bundle adjuster that does nothing.
Stub exposure compensator which does nothing.
Stub seam estimator which does nothing.
Base class for all pairwise seam estimators.
Warper that maps an image onto the z = 1 plane.
Base class for warping logic implementation.
Rotation-only model image warper interface.
Base class for a seam estimator.
Warper that maps an image onto the unit sphere located at the origin.
Voronoi diagram-based seam estimator.
Plane warper factory class.
Spherical warper factory class
High level image stitcher.
Image warper factories base class.
Functions
Tries to detect the wave correction kind depending on whether a panorama spans horizontally or vertically
@brief
@brief
///////////////////////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////
Tries to make panorama more horizontal (or vertical).