1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428 429 430 431 432 433 434 435 436
//! # kaori_hsm state machine library
//! kaori_hsm is a library for developing Hierarchical State Machines (HSMs) in Rust. Low memory
//! footprint and execution speed are primary focuses of this library as it is designed to
//! run on systems with low resources such as microcontrollers. As being hardware-independent,
//! the library can be run on any system for which there is a rust compiler available for it.
//! Some of the key advantages of this library are:
//! - No use of dynamic memory allocation
//! - Fast execution, low stack and program memory usage
//! - no use of rust standard library, nor any other external crate
//!## What are hierarchical state machines ?
//! States machines are software entities processing events differently depending on the state in
//! which they are. Different input events may lead to different actions being performed by the state
//! machine and can trigger transitions to other states.
//!
//! Hierarchical State Machines are state machines which can have nested states. This means that if
//! an event cannot be handled in a state, its super state could eventually handle it.
//! HSMs are therefore particularly useful for designing state machines with complex behavior.
//!
//! For understanding how state machines and especially HSMs work, I especially recommend the video series
//! made by Miro Samek that you can find [here](https://youtube.com/playlist?list=PLPW8O6W-1chxym7TgIPV9k5E8YJtSBToI&si=mfiiiq3EMLj1bJpH)
//!
//! ## How to use the library ?
//! To build your own state machine, you first have to define the structure that will hold its
//! data and then you will need to implement the following traits of the library on it: the [`TopState`]
//! trait and as many variants of the [`State<Tag>`] trait as you want to define states.
//!
//! The following sequence has to be followed in order to build an operational state machine:
//! - Create an instance of the structure which will hold the data of your state machine.
//! - Encapsulate an instance of this structure into an InitStateMachine instance using the [`InitStateMachine::from()`] function.
//! - Initialize the state machine by calling the [`InitStateMachine::init()`] method on this instance. It will initialize the state machine and lead
//! it to its first state. A [`StateMachine`] instance will be returned from this method. This type represents a fully operational state machine
//! and only exposes the [`StateMachine::dispatch()`] method used for injecting event variants into it.
//!
//! ## Examples across the project
//! This library features many examples that show you its potential and help you understand how to use it. Most of them can be
//! run without any specific hardware.
//! You will find small examples embedded in the library types and functions definitions composing this library. Those examples
//! focus primarily on featuring the use case of those types and functions.
//! Then there are more complex examples that you will find in the `kaori_hsm/examples` directory.
//! Those are easy to play with and a make a good base for making your own state machines.
//! Integrations tests in the `kaori_hsm/tests` directory can also serve the purpose of examples,
//! but are very rigid and contain a lot of test-specific code.
//! Finally you will find on [this repository](https://github.com/AntoineMugnier/kaori-hsm-perf-test)
//! a project designed to test the performance of this library on a stm32f103c8T6 microcontroller.
//! The performance test may not be easy to understand for a newcomer to the library, but it may be the most practical example.
//!
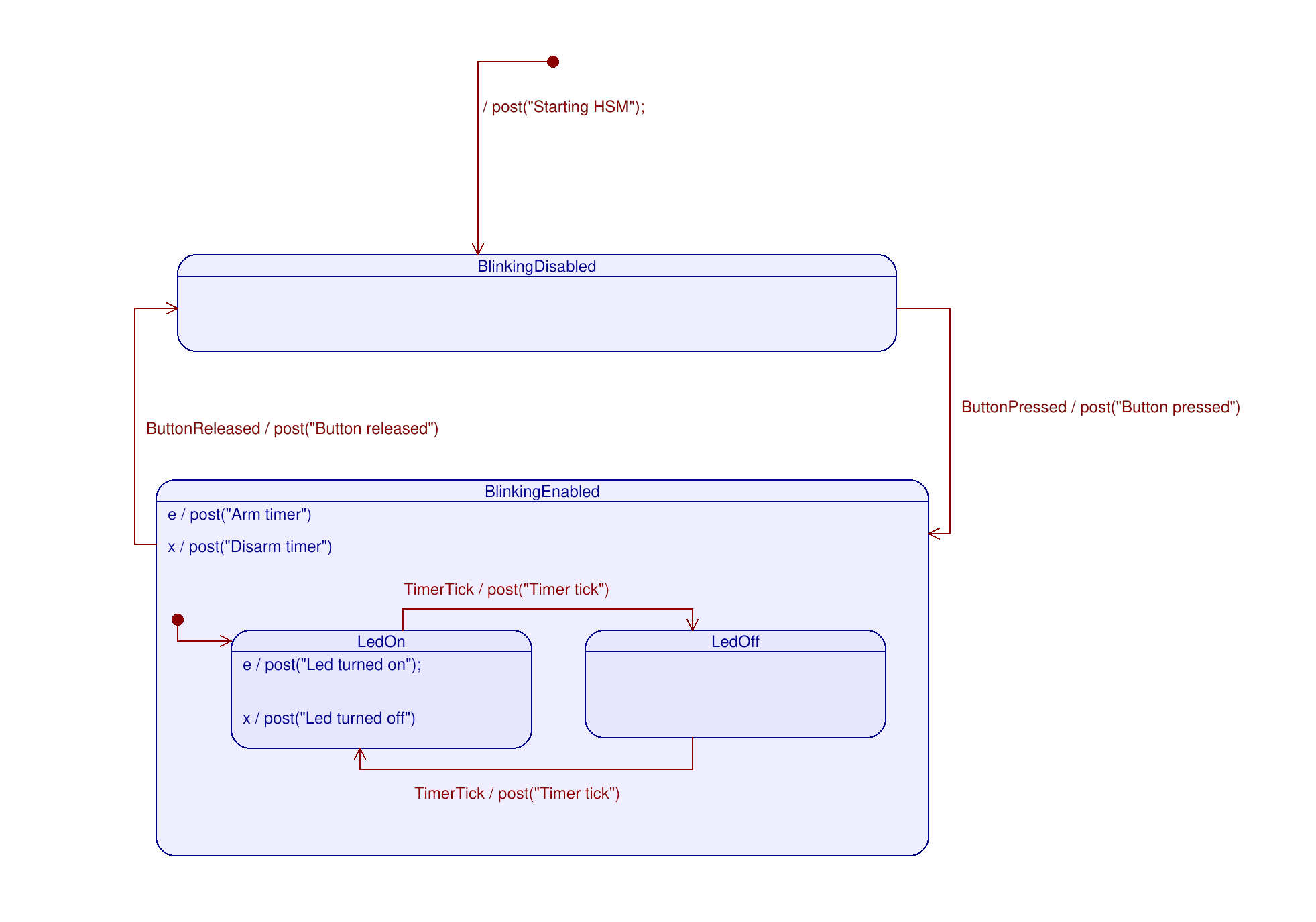
//! ## An introductory hierarchical state machine example
//! The following example features an hypothetical state machine written using the `kaori_hsm` library. This HSM simulates the blinking
//! of a led depending on the change of the state of a button. When the state machine boots up, the led is
//! off. At the time the button is pressed, the led starts blinking. When the button is released, the led
//! stop blinking.
//! This example is associated with a testing code. The test uses a queue onto which the HSM posts a
//! specific string every time it takes a specific action. After initializing the HSM or dispatching
//! an event to it, the test code checks that the series of strings on the queue matches the expectation.
//!
//! 
//! ```rust
//! use std::sync::mpsc::{channel, Receiver, Sender, TryRecvError};
//! use kaori_hsm::*;
//! enum BlinkingEvent{
//! ButtonPressed,
//! ButtonReleased,
//! TimerTick,
//! }
//!
//! struct BasicStateMachine{
//! sender: Sender<String>,
//! }
//!
//! impl BasicStateMachine{
//! pub fn new(sender: Sender<String>) -> BasicStateMachine {
//! BasicStateMachine { sender }
//! }
//!
//! // Post a string to the test queue
//! fn post_string(&self, s : &str){
//! self.sender.send(String::from(s)).unwrap();
//! }
//! }
//!
//! impl TopState for BasicStateMachine{
//! type Evt = BlinkingEvent;
//!
//! fn init(&mut self) -> InitResult<Self> {
//! self.post_string("Starting HSM");
//! init_transition!(BlinkingDisabled)
//! }
//!}
//!
//! #[state(super_state= Top)]
//! impl State<BlinkingDisabled> for BasicStateMachine{
//!
//! fn handle(&mut self, evt: & BlinkingEvent) -> HandleResult<Self> {
//! match evt{
//! BlinkingEvent::ButtonPressed => {
//! self.post_string("Button pressed");
//! transition!(BlinkingEnabled)
//! }
//! _ => ignored!()
//! }
//! }
//! }
//! #[state(super_state= Top)]
//! impl State<BlinkingEnabled> for BasicStateMachine{
//!
//! fn entry(&mut self) {
//! self.post_string("Arm timer");
//! }
//!
//! fn exit(&mut self) {
//! self.post_string("Disarm timer");
//! }
//!
//! fn init(&mut self) -> InitResult<Self>{
//! init_transition!(LedOn)
//! }
//!
//! fn handle(&mut self, evt: & BlinkingEvent) -> HandleResult<Self> {
//! match evt{
//! BlinkingEvent::ButtonReleased => {
//! self.post_string("Button released");
//! transition!(BlinkingDisabled)
//! }
//! _ => ignored!()
//! }
//! }
//! }
//!
//! #[state(super_state= BlinkingEnabled)]
//! impl State<LedOn> for BasicStateMachine{
//!
//! fn entry(&mut self) {
//! self.post_string("Led turned on");
//! }
//!
//! fn exit(&mut self) {
//! self.post_string("Led turned off");
//! }
//!
//! fn handle(&mut self, evt: & BlinkingEvent) -> HandleResult<Self> {
//! match evt{
//! BlinkingEvent::TimerTick =>{
//! self.post_string("Timer tick");
//! transition!(LedOff)
//! }
//! _ => ignored!()
//! }
//! }
//! }
//!
//! #[state(super_state= BlinkingEnabled)]
//! impl State<LedOff> for BasicStateMachine{
//!
//! fn handle(&mut self, evt: & BlinkingEvent) -> HandleResult<Self> {
//! match evt{
//! BlinkingEvent::TimerTick =>{
//! self.post_string("Timer tick");
//! transition!(LedOn)
//! }
//! _ => ignored!()
//! }
//! }
//! }
//!
//!# fn collect_sm_output(receiver: &Receiver<String>) -> String {
//!# receiver.try_recv().unwrap_or_else(|err| match err {
//!# TryRecvError::Empty => panic!("Too many expectations for the SM output"),
//!# TryRecvError::Disconnected => panic!("Disconnected"),
//!# })
//!# }
//!#
//!# // Panics if the seies of events comming out of the state machine does not match to expectations
//!# fn assert_eq_sm_output(receiver: &Receiver<String>, expectations: &[&str]) {
//!# for (index, &expectation) in expectations.iter().enumerate() {
//!# let sm_output = collect_sm_output(receiver);
//!# if expectation != sm_output {
//!# panic!(
//!# "Expectation index {}, expected : {}, got: {}",
//!# index, expectation, sm_output
//!# )
//!# }
//!# }
//!#
//!# // Check that we have expected all the output of the SM
//!# match receiver.try_recv().err() {
//!# Some(TryRecvError::Empty) => { /* OK */ }
//!# Some(TryRecvError::Disconnected) => {
//!# panic!(" Sender is dead")
//!# }
//!# None => {
//!# panic!("Too few expectations for the SM output")
//!# }
//!# }
//!# }
//!
//! let (sender, mut receiver) = channel();
//!
//! let basic_state_machine = BasicStateMachine::new(sender);
//!
//! let ism = InitStateMachine::from(basic_state_machine);
//!
//! // Execute the topmost initial transition of the state machine, leading to BlinkingDisabled
//! // state
//! let mut sm = ism.init();
//! assert_eq_sm_output(&receiver, &["Starting HSM"]);
//!
//! // Event ButtonReleased is ignored in this state
//! sm.dispatch(&BlinkingEvent::ButtonReleased);
//! assert_eq_sm_output(&receiver, &[]);
//!
//! sm.dispatch(&BlinkingEvent::ButtonPressed);
//! assert_eq_sm_output(&receiver, &["Button pressed", "Arm timer","Led turned on"]);
//!
//! sm.dispatch(&BlinkingEvent::TimerTick);
//! assert_eq_sm_output(&receiver, &["Timer tick", "Led turned off"]);
//!
//! sm.dispatch(&BlinkingEvent::TimerTick);
//! assert_eq_sm_output(&receiver, &["Timer tick", "Led turned on"]);
//!
//! sm.dispatch(&BlinkingEvent::ButtonReleased);
//! assert_eq_sm_output(&receiver, &["Button released","Led turned off", "Disarm timer"]);
//!```
//! ## Cargo commands index
//! The present directory must be `kaori_hsm/kaori_hsm` to run every cargo command.
//! ### Building the lib in release mode
//! ```shell
//! cargo build --release
//! ````
//! ### Running doc test
//! ```shell
//! cargo test --doc
//! ```
//! ### Running a specific integration test
//! ```shell
//! cargo test --test [test_name]
//! ```
//! ### Running a specific example from the `examples` directory
//! ```shell
//! cargo run --example [example_name]
//! ```
//!
//! ## License
//!
//! Licensed under either of
//!
//! - Apache License, Version 2.0 ([LICENSE-APACHE](LICENSE-APACHE) or
//! <http://www.apache.org/licenses/LICENSE-2.0>)
//! - MIT license ([LICENSE-MIT](LICENSE-MIT) or <http://opensource.org/licenses/MIT>)
//!
//! at your option.
#![no_std]
mod init_state_machine;
mod proto_state_machine;
mod sm_business_logic;
mod state;
mod state_machine;
pub use init_state_machine::InitStateMachine;
pub use proto_state_machine::TopState;
pub use state::{HandleResult, InitResult, ParentState, State};
pub use state_machine::StateMachine;
extern crate kaori_hsm_derive;
pub use kaori_hsm_derive::state;
/// Sugar for constructing a `InitResult::TargetState` enum variant containing the target of the
/// initial transition. Can be either used in [`TopState::init`] or [`State<Tag>::init`]
/// # Example
/// ```
///# use kaori_hsm::*;
///# enum BasicEvt{A}
///#
///# struct BasicStateMachine{
///# }
///#
///#
/// impl TopState for BasicStateMachine{
/// type Evt = BasicEvt;
///
/// fn init(&mut self) -> InitResult<Self> {
/// init_transition!(S0)
/// }
///
/// }
///
/// #[state(super_state= Top)]
/// impl State<S0> for BasicStateMachine{
/// fn init(&mut self) -> InitResult<Self> {
/// println!("S0-INIT");
/// init_transition!(S1)
/// }
///
/// fn handle(&mut self, evt: & BasicEvt) -> HandleResult<Self> {
/// match evt{
/// _ => ignored!()
/// }
/// }
/// }
///#
///# #[state(super_state= Top)]
///# impl State<S1> for BasicStateMachine{
///#
///# fn handle(&mut self, evt: & BasicEvt) -> HandleResult<Self> {
///# match evt{
///# _ => ignored!()
///# }
///# }
///# }
///```
#[macro_export]
macro_rules! init_transition {
($target_state_tag:ident) => {
kaori_hsm::InitResult::TargetState(kaori_hsm::State::<$target_state_tag>::core_handle)
};
}
/// Sugar for constructing a `HandleResult::Transition` enum variant containing the target of the
/// transition
/// # Example
/// ```
///# use kaori_hsm::*;
///# enum BasicEvt{A}
///#
///# struct BasicStateMachine{
///# }
///#
///#
///# impl TopState for BasicStateMachine{
///# type Evt = BasicEvt;
///#
///# fn init(&mut self) -> InitResult<Self> {
///# init_transition!(S0)
///# }
///#
///# }
///#
///# #[state(super_state= Top)]
///# impl State<S1> for BasicStateMachine{
///#
///# fn handle(&mut self, evt: & BasicEvt) -> HandleResult<Self> {
///# match evt{
///# _ => ignored!()
///# }
///# }
///# }
///#
/// #[state(super_state= Top)]
/// impl State<S0> for BasicStateMachine{
///
/// fn handle(&mut self, evt: & BasicEvt) -> HandleResult<Self> {
/// match evt{
/// BasicEvt::A => {
/// println!("S0-HANDLES-A");
/// transition!(S0)
/// }
/// }
/// }
/// }
///```
#[macro_export]
macro_rules! transition {
($target_state_tag:ident) => {
kaori_hsm::HandleResult::Transition(kaori_hsm::State::<$target_state_tag>::core_handle)
};
}
/// Sugar for constructing a `HandleResult::Ignored` enum variant meaning no event has been handled
/// ```
///# use kaori_hsm::*;
///# enum BasicEvt{A}
///#
///# struct BasicStateMachine{
///# }
///#
///#
///# impl TopState for BasicStateMachine{
///# type Evt = BasicEvt;
///#
///# fn init(&mut self) -> InitResult<Self> {
///# init_transition!(S0)
///# }
///#
///# }
///#
/// #[state(super_state= Top)]
/// impl State<S0> for BasicStateMachine{
///
/// fn handle(&mut self, evt: & BasicEvt) -> HandleResult<Self> {
/// match evt{
/// _ => ignored!()
/// }
/// }
/// }
///```
#[macro_export]
macro_rules! ignored {
() => {
kaori_hsm::HandleResult::Ignored
};
}
/// Sugar for constructing a `HandleResult::Handle` enum variant meaning the event has been caught
/// without transition occuring.
/// ```
///# use kaori_hsm::*;
///# enum BasicEvt{A}
///#
///# struct BasicStateMachine{
///# }
///#
///#
///# impl TopState for BasicStateMachine{
///# type Evt = BasicEvt;
///#
///# fn init(&mut self) -> InitResult<Self> {
///# init_transition!(S0)
///# }
///#
///# }
///#
/// #[state(super_state= Top)]
/// impl State<S0> for BasicStateMachine{
///
/// fn handle(&mut self, evt: & BasicEvt) -> HandleResult<Self> {
/// match evt{
/// BasicEvt::A => {
/// println!("S0-HANDLES-A");
/// handled!()
/// }
/// }
/// }
/// }
///```
#[macro_export]
macro_rules! handled {
() => {
kaori_hsm::HandleResult::Handled
};
}