1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 406 407 408 409 410 411 412 413 414 415 416 417 418 419 420 421 422 423 424 425 426 427 428
#![deny( missing_docs, // missing_doc_code_examples, missing_debug_implementations, missing_copy_implementations, trivial_casts, trivial_numeric_casts, unsafe_code, unstable_features, unused_import_braces, unused_qualifications )] #![allow(clippy::upper_case_acronyms)] //! A crate to quickly approximate Paths on a Grid. //! //! # Use Case //! //! Finding Paths on a Grid is an expensive Operation. Consider the following Setup: //! //! 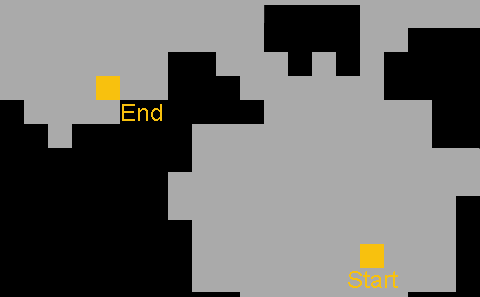 //! //! In order to calculate a Path from Start to End using regular A*, it is necessary to check a //! lot of Tiles: //! //! 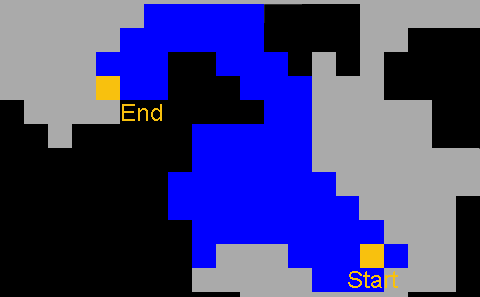 //! //! (This is simply a small example, longer Paths require a quadratic increase in Tile checks, //! and unreachable Goals require the check of _**every single**_ Tile) //! //! The Solution that Hierarchical Pathfinding provides is to divide the Grid into Chunks and //! cache the Paths between Chunk entrances as a Graph of Nodes: //! //! 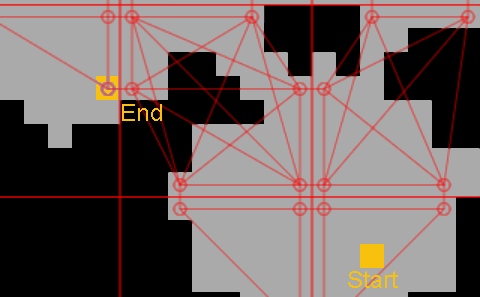 //! //! This allows Paths to be generated by connecting the Start and End to the Nodes within the //! Chunk and using the Graph for the rest: //! //! 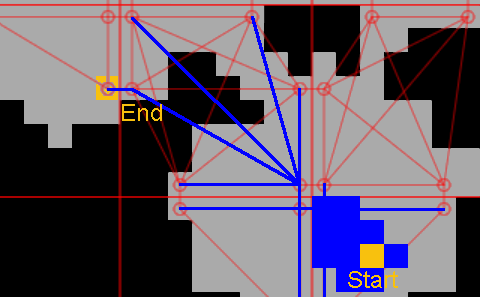 //! //! Since the Graph is not an exact representation of the Grid, **the resulting Paths will //! be slightly worse than the actual best Path** (unless [`config.perfect_paths`](PathCacheConfig::perfect_paths) //! is set to `true`). This is usually not a problem, since the purpose of Hierarchical Pathfinding //! is to quickly find the next direction to go in or a Heuristic for the Cost and existence //! of a Path. //! //! The only time where the actual best Path would noticeably differ is in the case of short Paths. //! That is why this crate calls the regular A* search after HPA* confirmed the length and //! existence. (This behavior can be turned of using the Config). //! //! This crate provides an implementation of a Hierarchical Pathfinding Algorithm for any generic Grid. //! Paths can be searched using either A* for a Path to a single Tile, or Dijkstra for searching //! multiple Targets. It handles solid walls in the Grid and actually finding a Path to a wall. //! //! # Examples //! ##### Creating the Cache //! First is the Grid itself. **How it is stored doesn't matter**, but lookup has to be fast. //! //! For this example, we shall use a 2D-Array: //! ```ignore //! // 0 = empty, 1 = swamp, 2 = wall //! let mut grid = [ //! [0, 2, 0, 0, 0], //! [0, 2, 2, 2, 0], //! [0, 1, 0, 0, 0], //! [0, 1, 0, 2, 0], //! [0, 0, 0, 2, 0], //! ]; //! let (width, height) = (grid.len(), grid[0].len()); //! //! let cost_map = [ //! 1, // empty //! 10, // swamp //! -1, // wall = solid //! ]; //! ``` //! Now for creating the [`PathCache`]: //! ``` //! # let mut grid = [ //! # [0, 2, 0, 0, 0], //! # [0, 2, 2, 2, 0], //! # [0, 1, 0, 0, 0], //! # [0, 1, 0, 2, 0], //! # [0, 0, 0, 2, 0], //! # ]; //! # let (width, height) = (grid.len(), grid[0].len()); //! # let cost_map = [ //! # 1, // empty //! # 10, // swamp //! # -1, // wall. Negative number == solid //! # ]; //! use hierarchical_pathfinding::prelude::*; //! //! let mut pathfinding = PathCache::new( //! (width, height), // the size of the Grid //! |(x, y)| cost_map[grid[y][x]], // get the cost for walking over a Tile //! ManhattanNeighborhood::new(width, height), // the Neighborhood //! PathCacheConfig { chunk_size: 3, ..Default::default() }, // config //! ); //! ``` //! The [`PathCache`] never takes the actual Grid, to allow for any storage format to be used //! (`Array`, `Vec`, `HashMap`, `kd-tree`, ...). Instead, it takes a callback function that //! indicates, how "expensive" walking across a Tile is (negative numbers for solid obstacles). //! //! Unfortunately, it is necessary to provide this function to every method of PathCache, since //! storing it would make the Grid immutable. See also [Updating the PathCache](#updating-the-pathcache). //! //! [Currying](https://en.wikipedia.org/wiki/Currying) can be used to reduce duplication: //! ``` //! # use hierarchical_pathfinding::prelude::*; //! # // 0 = empty, 1 = swamp, 2 = wall //! # let mut grid = [ //! # [0, 2, 0, 0, 0], //! # [0, 2, 2, 2, 0], //! # [0, 1, 0, 0, 0], //! # [0, 1, 0, 2, 0], //! # [0, 0, 0, 2, 0], //! # ]; //! # let (width, height) = (grid.len(), grid[0].len()); //! # type Grid = [[usize; 5]; 5]; //! const COST_MAP: [isize; 3] = [1, 10, -1]; // now const for ownership reasons //! //! // only borrows the Grid when called //! fn cost_fn(grid: &Grid) -> impl '_ + FnMut((usize, usize)) -> isize { //! move |(x, y)| COST_MAP[grid[y][x]] //! } //! //! let mut pathfinding = PathCache::new( //! (width, height), // the size of the Grid //! //! // simply call the creator function to take a reference of the Grid //! cost_fn(&grid), //! // ... //! # ManhattanNeighborhood::new(width, height), // the Neighborhood //! # PathCacheConfig { chunk_size: 3, ..Default::default() }, // config //! # ); //! ``` //! //! ##### Pathfinding //! Finding the Path to a single Goal: //! ``` //! # use hierarchical_pathfinding::prelude::*; //! # let mut grid = [ //! # [0, 2, 0, 0, 0], //! # [0, 2, 2, 2, 2], //! # [0, 1, 0, 0, 0], //! # [0, 1, 0, 2, 0], //! # [0, 0, 0, 2, 0], //! # ]; //! # let (width, height) = (grid.len(), grid[0].len()); //! # fn cost_fn(grid: &[[usize; 5]; 5]) -> impl '_ + FnMut((usize, usize)) -> isize { //! # move |(x, y)| [1, 10, -1][grid[y][x]] //! # } //! # let mut pathfinding = PathCache::new( //! # (width, height), //! # cost_fn(&grid), //! # ManhattanNeighborhood::new(width, height), //! # PathCacheConfig { chunk_size: 3, ..Default::default() }, //! # ); //! # //! let start = (0, 0); //! let goal = (4, 4); //! //! // find_path returns Some(Path) on success //! let path = pathfinding.find_path( //! start, //! goal, //! cost_fn(&grid), //! ); //! //! assert!(path.is_some()); //! let path = path.unwrap(); //! //! assert_eq!(path.cost(), 12); //! ``` //! For more information, see [`find_path`](PathCache::find_path). //! //! Finding multiple Goals: //! ``` //! # use hierarchical_pathfinding::prelude::*; //! # let mut grid = [ //! # [0, 2, 0, 0, 0], //! # [0, 2, 2, 2, 2], //! # [0, 1, 0, 0, 0], //! # [0, 1, 0, 2, 0], //! # [0, 0, 0, 2, 0], //! # ]; //! # let (width, height) = (grid.len(), grid[0].len()); //! # fn cost_fn(grid: &[[usize; 5]; 5]) -> impl '_ + FnMut((usize, usize)) -> isize { //! # move |(x, y)| [1, 10, -1][grid[y][x]] //! # } //! # let mut pathfinding = PathCache::new( //! # (width, height), //! # cost_fn(&grid), //! # ManhattanNeighborhood::new(width, height), //! # PathCacheConfig { chunk_size: 3, ..Default::default() }, //! # ); //! # //! let start = (0, 0); //! let goals = [(4, 4), (2, 0)]; //! //! // find_paths returns a HashMap<goal, Path> for all successes //! let paths = pathfinding.find_paths( //! start, //! &goals, //! cost_fn(&grid), //! ); //! //! // (4, 4) is reachable //! assert!(paths.contains_key(&goals[0])); //! //! // (2, 0) is not reachable //! assert!(!paths.contains_key(&goals[1])); //! ``` //! For more information, see [`find_paths`](PathCache::find_paths). //! //! ##### Using a Path //! - Path exists: `path.is_some()` | `paths.contains_key()` //! - Useful as a Heuristic for other Algorithms //! - **100% correct** (`true` if and only if path can be found) //! - Total Cost of the Path: [`path.cost()`](internals::AbstractPath::cost) //! - Correct for this Path, may be slightly larger than for optimal Path //! - The cost is simply returned; `cost()` does no calculations //! - Total Length of the Path: [`path.length()`](internals::AbstractPath::length) //! - Correct for this Path, may be slightly longer than the optimal Path //! - The length is simply returned; `length()` does no calculations //! - Next Position: [`path.next()`](internals::AbstractPath::next) | [`path.safe_next(cost_fn)`](internals::AbstractPath::safe_next) //! - [`safe_next`](internals::AbstractPath::safe_next) is needed if [`config.cache_paths`](crate::PathCacheConfig::cache_paths) is set to `false` //! - can be called several times to iterate Path //! - path implements `Iterator<Item = (usize, usize)>` //! - Entire Path: `path.collect::<Vec<_>>()` | [`path.resolve(cost_fn)`](internals::AbstractPath::resolve) //! - [`resolve`](internals::AbstractPath::resolve) is needed if [`config.cache_paths`](crate::PathCacheConfig::cache_paths) is set to `false` //! - Returns a `Vec<(usize, usize)>` //! //! Note that [`resolve`](internals::AbstractPath::resolve) calculates any missing segments (if [`config.cache_paths`](crate::PathCacheConfig::cache_paths) ` == false`) //! and allocates a [`Vec`](std::vec::Vec) with the resulting Points. Not recommended if only the //! beginning of the Path is needed. //! ``` //! # use hierarchical_pathfinding::prelude::*; //! # let mut grid = [ //! # [0, 2, 0, 0, 0], //! # [0, 2, 2, 2, 2], //! # [0, 1, 0, 0, 0], //! # [0, 1, 0, 2, 0], //! # [0, 0, 0, 2, 0], //! # ]; //! # let (width, height) = (grid.len(), grid[0].len()); //! # fn cost_fn(grid: &[[usize; 5]; 5]) -> impl '_ + FnMut((usize, usize)) -> isize { //! # move |(x, y)| [1, 10, -1][grid[y][x]] //! # } //! # let mut pathfinding = PathCache::new( //! # (width, height), //! # cost_fn(&grid), //! # ManhattanNeighborhood::new(width, height), //! # PathCacheConfig { chunk_size: 3, ..Default::default() }, //! # ); //! # struct Player{ pos: (usize, usize) } //! # impl Player { //! # pub fn move_to(&mut self, pos: (usize, usize)) { //! # self.pos = pos; //! # } //! # } //! # //! let mut player = Player { //! pos: (0, 0), //! //... //! }; //! let goal = (4, 4); //! //! let mut path = pathfinding.find_path( //! player.pos, //! goal, //! cost_fn(&grid), //! ).unwrap(); //! //! player.move_to(path.next().unwrap()); //! assert_eq!(player.pos, (0, 1)); //! //! // wait for next turn or whatever //! //! player.move_to(path.next().unwrap()); //! assert_eq!(player.pos, (0, 2)); //! //! // iterating is possible //! for new_pos in path { //! player.move_to(new_pos); //! } //! assert_eq!(player.pos, goal); //! ``` //! //! ##### Updating the PathCache //! The PathCache does not contain a copy or reference of the Grid for mutability and Ownership reasons. //! This means however, that the user is responsible for storing and maintaining both the Grid and the PathCache. //! It is also necessary to update the PathCache when the Grid has changed to keep it consistent: //! ```should_panic //! # use hierarchical_pathfinding::prelude::*; //! # let mut grid = [ //! # [0, 2, 0, 0, 0], //! # [0, 2, 2, 2, 2], //! # [0, 1, 0, 0, 0], //! # [0, 1, 0, 2, 0], //! # [0, 0, 0, 2, 0], //! # ]; //! # let (width, height) = (grid.len(), grid[0].len()); //! # fn cost_fn(grid: &[[usize; 5]; 5]) -> impl '_ + FnMut((usize, usize)) -> isize { //! # move |(x, y)| [1, 10, -1][grid[y][x]] //! # } //! # let mut pathfinding = PathCache::new( //! # (width, height), //! # cost_fn(&grid), //! # ManhattanNeighborhood::new(width, height), //! # PathCacheConfig { chunk_size: 3, ..Default::default() }, //! # ); //! # //! let (start, goal) = ((0, 0), (2, 0)); //! //! let path = pathfinding.find_path(start, goal, cost_fn(&grid)); //! assert!(path.is_none()); // from previous example //! //! // Clear a way to the goal //! grid[1][2] = 0; // at (2, 1): the wall below the goal //! //! let path = pathfinding.find_path(start, goal, cost_fn(&grid)); //! assert!(path.is_some()); // there should be a Path now! //! ``` //! [`tiles_changed`](PathCache::tiles_changed) must be called with all changed Tiles: //! ``` //! # use hierarchical_pathfinding::prelude::*; //! # let mut grid = [ //! # [0, 2, 0, 0, 0], //! # [0, 2, 2, 2, 2], //! # [0, 1, 0, 0, 0], //! # [0, 1, 0, 2, 0], //! # [0, 0, 0, 2, 0], //! # ]; //! # let (width, height) = (grid.len(), grid[0].len()); //! # fn cost_fn(grid: &[[usize; 5]; 5]) -> impl '_ + FnMut((usize, usize)) -> isize { //! # move |(x, y)| [1, 10, -1][grid[y][x]] //! # } //! # let mut pathfinding = PathCache::new( //! # (width, height), //! # cost_fn(&grid), //! # ManhattanNeighborhood::new(width, height), //! # PathCacheConfig { chunk_size: 3, ..Default::default() }, //! # ); //! # //! let (start, goal) = ((0, 0), (2, 0)); //! //! let path = pathfinding.find_path(start, goal, cost_fn(&grid)); //! assert!(path.is_none()); //! //! // Clear a way to the goal //! grid[1][2] = 0; // at (2, 1): the wall below the goal //! //! pathfinding.tiles_changed( //! &[(2, 1)], //! cost_fn(&grid), //! ); //! //! let path = pathfinding.find_path(start, goal, cost_fn(&grid)); //! assert!(path.is_some()); //! ``` //! `tiles_changed` takes a slice of Points, and it is recommended to bundle changes together for //! performance reasons. //! //! ##### Configuration //! The last parameter for PathCache::new is a [`PathCacheConfig`] object with different options to have more control over the generated PathCache. //! These options are mostly used to adjust the balance between Performance and Memory Usage, with the default values aiming more at Performance. //! The PathCacheConfig struct also provides defaults for low Memory Usage [`PathCacheConfig::LOW_MEM`] //! or best Performance [`PathCacheConfig::HIGH_PERFORMANCE`] //! ``` //! # use hierarchical_pathfinding::prelude::*; //! # let mut grid = [ //! # [0, 2, 0, 0, 0], //! # [0, 2, 2, 2, 2], //! # [0, 1, 0, 0, 0], //! # [0, 1, 0, 2, 0], //! # [0, 0, 0, 2, 0], //! # ]; //! # let (width, height) = (grid.len(), grid[0].len()); //! # fn cost_fn(grid: &[[usize; 5]; 5]) -> impl '_ + FnMut((usize, usize)) -> isize { //! # move |(x, y)| [1, 10, -1][grid[y][x]] //! # } //! //! let mut pathfinding = PathCache::new( //! (width, height), // the size of the Grid //! cost_fn(&grid), // get the cost for walking over a Tile //! ManhattanNeighborhood::new(width, height), // the Neighborhood //! PathCacheConfig { //! chunk_size: 3, //! ..PathCacheConfig::LOW_MEM //! } //! ); //! //! assert_eq!(pathfinding.config().chunk_size, 3); //! ``` type Point = (usize, usize); type PointMap<V> = std::collections::HashMap<Point, V, fnv::FnvBuildHasher>; type PointSet = std::collections::HashSet<Point, fnv::FnvBuildHasher>; mod path_cache; pub use self::path_cache::{PathCache, PathCacheConfig}; mod path; mod utils; pub(crate) use utils::*; pub mod neighbors; mod graph; mod grid; /// Internal stuff that is returned by other function pub mod internals { pub use crate::path::AbstractPath; pub use crate::path_cache::{CacheInspector, NodeInspector}; } /// The prelude for this crate. pub mod prelude { pub use crate::{ neighbors::{ManhattanNeighborhood, MooreNeighborhood, Neighborhood}, PathCache, PathCacheConfig, }; }